Изобретение относится к измерительным комплексам и системам летательных аппаратов (ЛА).
Известно решение задачи определения ориентации протяженного объекта (потребителя) [1], заключающееся в установке в разнесенных точках объекта А, В двух приемников радиосигналов (аппаратуры потребителя) спутниковых навигационных систем (СНС), измерении с их помощью разностей дальностей от точек А, В до трех навигационных спутников и расчете направляющих косинусов  углов ориентации
углов ориентации  отрезка прямой АВ относительно геоцентрической (например, гринвичской) системы координат OXYZ.
отрезка прямой АВ относительно геоцентрической (например, гринвичской) системы координат OXYZ.
Отвечая на вопрос о принципиальной возможности решения такой задачи, содержащиеся в [1] результаты ограничиваются общими выводами и не дают практических рекомендаций по построению конкретных угломерных устройств. Отсутствует алгоритм перехода от углов Эйлера  к соответствующим углам в топоцентрической (например, СК-42) системы координат, прежде всего, к углу курса, необходимому для навигации подвижных объектов.
к соответствующим углам в топоцентрической (например, СК-42) системы координат, прежде всего, к углу курса, необходимому для навигации подвижных объектов.
Наиболее близким к заявляемому изобретению по технической сущности (прототипом) является измеритель курса подвижного объекта (ИКПО) [2], состоящий из двух аналогичных, подключенных к блоку расчета взаимных координат (РВК) контуров, включающих в себя последовательно соединенные блоки измерения относительных параметров (ИОП) и расчета точечных координат (РТК). Выход блока РВК подключен к входу блока расчета курсового угла (РКУ), выход которого является выходом ИКПО. К блоку РКУ также подключена внешняя информационная система (ВИС), не входящая в состав ИКПО.
Блоки ИОП установлены на ПО в двух разнесенных точках и предназначены для приема и первичной обработки радиосигналов СНС, результатом чего являются оценки соответствующих дальностей (строго говоря, псевдодальностей). Эти данные поступают на входы блоков РТК, на выходе которых формируются координаты 
 точек установки блоков ИОП в связанной с Землей системе координат OXYZ. По этим координатам в блоке РВК рассчитываются взаимные координаты
точек установки блоков ИОП в связанной с Землей системе координат OXYZ. По этим координатам в блоке РВК рассчитываются взаимные координаты 
 которые затем пересчитываются в географическую систему координат OENH:
которые затем пересчитываются в географическую систему координат OENH:

где λ1, φ1 - долгота и широта точки установки первого блока ИОП, определяемые в первом блоке РТК. Далее по географическим разностям координат (1) в блоке РКУ осуществляется расчет азимутального угла ψ отрезка прямой, соединяющего точки установки блоков ИОП:

При строгом горизонтировании осей ox, oz связанной с ПО системы координат oxyz (не путать с системой координат OXYZ) и установке блоков ИОП на продольной оси ох объекта соотношение (2) является формулой расчета истинного курса ψист ПО. При нарушении этих условий, а именно при ненулевых углах тангажа ν и крена γ и произвольной установке блоков ИОП относительно осей системы координат oxyz соотношение (2) следует корректировать:

на величину поправки Δψ:

где

 -координаты точек установки блоков ИОП, также рассчитываемой в блоке РКУ. Для получения необходимых для расчета значений углов ν, γ к блоку РКУ подключена ВИС, определяющая угловую ориентацию ПО и входящая в состав его бортового радиоэлектронного оборудования (БРЭО).
-координаты точек установки блоков ИОП, также рассчитываемой в блоке РКУ. Для получения необходимых для расчета значений углов ν, γ к блоку РКУ подключена ВИС, определяющая угловую ориентацию ПО и входящая в состав его бортового радиоэлектронного оборудования (БРЭО).
Недостатками измерителя-прототипа являются сложность состава и конструктивного исполнения, неавтономность и несочетаемость с оснащением экипажа подвижного объекта (в частности, пилотируемого ЛА).
Цель заявляемого изобретения состоит в создании простого по составу и исполнению, автономного измерителя курса, встроенного в экипировку членов экипажа ЛА.
Подобный измеритель может быть полезен для таких подвижных объектов, как боевые пилотируемые ЛА - вертолеты и самолеты, не оснащенные бортовой инерциальной навигационной системой. К ним относится значительная часть боевых и транспортно-боевых вертолетов (Ми-8, Ми-24 и т.п.), учебно-боевых самолетов (Л-29, Л-39 и т.п.), самолетов-штурмовиков (Су-25) и так называемых «противопартизанских» ударных самолетов (зарубежные IA-58, OV-10, А-37). Для решения одной из наиболее важных для указанных ЛА задач - визуального поиска наземных целей и ориентиров по заданным или полученным оперативно координатам, необходимо наличие информации о текущей ориентации продольной оси ЛА. Имеющаяся на борту аппаратура СНС определяет величину и направление текущей путевой скорости, но не имеет возможности определить ориентацию продольной оси ЛА. Использование доплеровских измерителей скорости и сноса в этом случае, как правило, невозможно из-за массогабаритных ограничений по размещению на ЛА или тактических ограничений на включение радиоизлучения по скрытности и помехоустойчивости.
Поскольку члены экипажа ЛА, как и наземные наблюдатели, обычно осуществляют допоиск цели в секторе вправо-влево относительно заданного направления, для указанной задачи достаточно иметь информацию о положении продольной оси с точностью 10°-20°. При этом поиск целей и ориентиров обычно осуществляется на участках прямолинейного полета с постоянной скоростью, а не в ходе высокодинамичных маневров. Кроме того, следует отметить, что большинство из указанных выше ЛА (Ми-8, Ми-24, Л-29, Л-39, IA-58, OV-10, А-37) имеет экипаж из двух человек.
Для достижения поставленной цели измеритель курса ЛА, содержащий два модуля спутниковой навигации (МСН) и вычислительный модуль (ВМ), выполняющий расчет курсового угла, дополнительно снабжен вторым аналогичным ВМ, двумя модулями радиосвязи (МРС), выполненными с возможностью встречной приемопередачи данных, и двумя модулями индикации (МИ), при этом ВМ через соответствующие интерфейсы попарно связаны с МСН, МРС и МИ, причем первые ВМ, МСН и МРС размещены соответственно в поясной и плечевых частях транспортного жилета первого члена экипажа ЛА, первый МИ размещен поверх летного костюма на его бедре, а вторые аналогичные модули так же размещены в транспортном жилете и на бедре второго члена экипажа ЛА.
Существенные отличительные признаки заявляемого изобретения по сравнению с прототипом состоят в следующем:
1. Ключевым отличительным признаком является построение измерителя курса в составе двух аналогичных независимых от БРЭО ЛА автономных комплектов, встроенных в экипировку экипажа. Каждый комплект содержит средства спутниковой навигации, радиосвязи, индикации и вычислений, выполненные по модульной технологии в виде полнофункциональных компактных устройств с полным набором задач по назначению. Взаимодействие комплектов осуществляется по радиоканалу приемопередачи данных. Этим достигается универсальность заявляемого измерителя и его инвариантность по отношению к типу ЛА, а дублирование и внутрикабинное размещение (на членах экипажа) обеспечивают его высокую надежность в боевых условиях.
В прототипе подобное решение не предусмотрено. Измеритель строится по устаревшей технологии из разделенных по функциям отдельных блоков: измерения навигационных ("относительных" по терминологии прототипа) параметров и расчета координат ("точечных координат") потребителя, расчета относительных ("взаимных") координат и расчета курсового угла. При этом предусмотрено подключение ВИС и поверхностное размещение блоков на ЛА. Эти обстоятельства, а также избыточное число компонентов приводят к снижению надежности и узкой специализации применения.
2. Размещение вычислительного модуля и модулей спутниковой навигации и радиосвязи соответственно в поясной и плечевых частях транспортного жилета каждого их двух членов экипажа ЛА, а модуля индикации поверх летного костюма на бедре каждого из них обеспечивает участникам комфортность ношения и удобство применения в различных условиях боевой обстановки. Тем самым реализуется возможность совместной параллельной работы комплектов измерителя с формированием согласованного итогового (усредненного) значения курсового угла.
В прототипе такая возможность отсутствует.
Приведенные отличительные признаки позволяют обеспечить рациональный состав, сочетаемость с экипировкой экипажа, автономность и высокую надежность измерителя при выполнении задач по назначению. В совокупности эти технические результаты составляют общий технический результат, заключающийся в обеспечении высокой боевой эффективности измерителя курса пилотируемого ЛА.
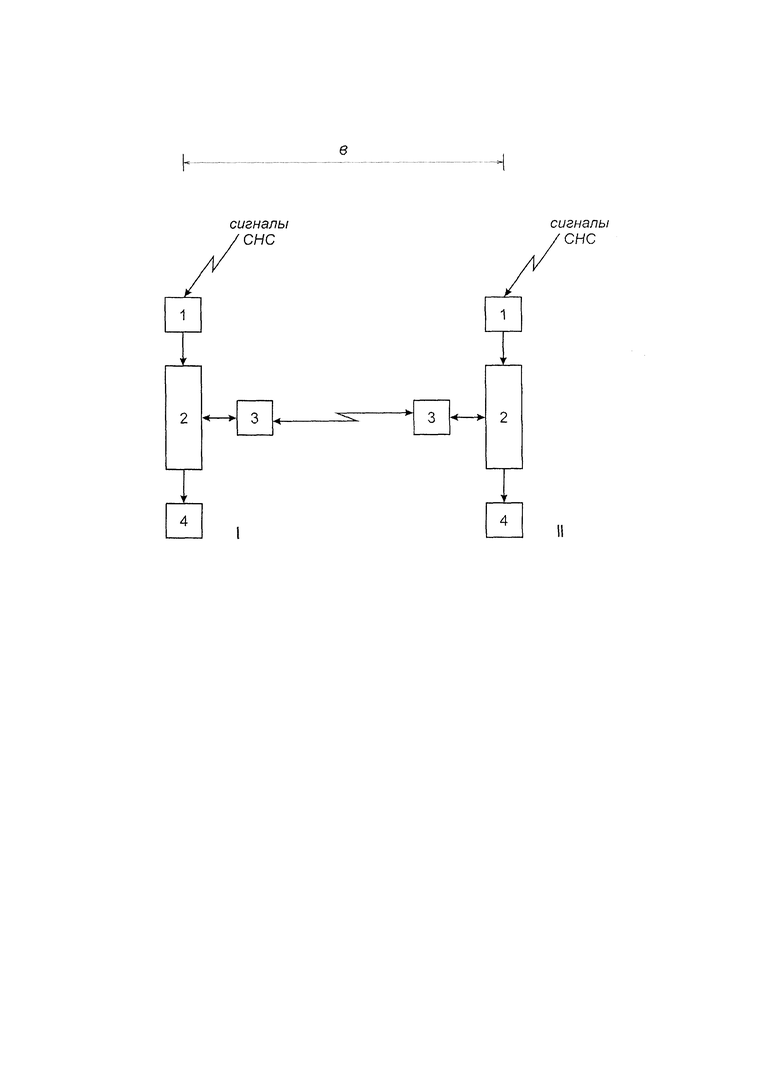
Заявляемое изобретение иллюстрирует структурная схема, где:
1. Модуль спутниковой навигации, МСН.
2. Вычислительный модуль, ВМ.
3. Модуль радиосвязи, МРС.
4. Модуль индикации, МИ.
Примечание: Римские цифры I, II означают условные номера членов экипажа (пилот, штурман), в - отрезок прямой, соединяющий МСН (база).
Отдельные аспекты работы заявляемого измерителя курса рассмотрены при анализе отличительных признаков. Дополним анализ более подробным рассмотрением работы измерителя, функций и возможностей реализации его компонентов.
Модули 1 реализуют известные [3] способы спутниковой радионавигации и обеспечивают высокоточное определение координат фазовых центров приемных антенн модулей (размещены на плечах членов экипажа), например, плановых координат X, Y и высоты Н в системе СК-42 или какой-либо другой системе координат, принятой в РФ для пилотирования боевой авиации. Естественно, при этом обеспечена радиопрозрачность фонаря кабины ЛА.
Вычислительные модули 2 выполняют функцию приема, хранения и обработки поставляемых модулями 1 данных (координат), конечным результатом чего является текущий угол курса ЛА. Этот результат транслируется модулями 2 на экраны модулей индикации 4, размещенных на бедре пилота (штурмана). Такая компоновка обеспечивает удобство визуального считывания курса без задействования рук членов экипажа и органов управления бортовыми приборами.
Модули 3, строящиеся, например, на основе комплектующих известного стандарта 802.11/b/g/n, обеспечивают автоматический встречный обмен координатными данными (два модуля 3 работают одновременно) между модулями 2 обоих комплектов, что необходимо для параллельного расчета курсового угла.
Примером практической реализации компонентов 1-4 являются аппаратно-программные средства комплекса разведки, управления и связи (КРУС) «Стрелец» [4]. Эти компоненты могут размещаться в транспортном жилете, выполненном по технологии разгрузочного жилета военных летчиков, входящего в комплект носимого аварийного запаса [5].
Таким образом, с помощью двух представленных комплектов решается задача измерения угла курса ЛА. Модули 1, встроенные в плечевую часть жилетов членов экипажа, размещаются либо вдоль продольной связанной оси ох ЛА в точках А, В на расстоянии базы (в этом случае координаты zA=zB=0), либо вдоль поперечной оси oz на том же (приблизительно) расстоянии (координаты хА=xB=0). Первый случай соответствует тандемной рассадке членов экипажа, второй случай - размещению экипажа рядом, "плечо к плечу". Координаты точек А, В (XA, YA), (XB, YB) в СК-42 известны (получены с помощью модулей 1).
Тогда для первого случая курсовой угол ψ, определяемый как угол между продольной осью ох и географическим меридианом, рассчитывается модулями 2 по формуле:

где 
Во втором случае в значение (5) вносится поправка, равная 90°.
Важно отметить, что при формировании относительных (разностных) координат ΔХ, ΔУ при малой базе в между точками А, В наиболее значимые для СПС эфемеридные и ионосферные ошибки измерений по одинаковому спутниковому созвездию практически равны между собой и взаимно сокращаются [6]. Поэтому точность относительных координат ΔХ, ΔY существенно выше точности абсолютных координат (ХА, YA), (XB, YB).
Показателем пригодности заявляемого изобретения для решения задачи курсоуказания пилотируемым ЛА является точность. Для ее оценки приведем формулу расчета дисперсии  ошибки курсового угла (5).
ошибки курсового угла (5).
При известных дисперсиях  ошибок относительных координат ΔХ, ΔY дисперсия
ошибок относительных координат ΔХ, ΔY дисперсия  равна:
равна:

где частные производные  определяются соотношениями:
определяются соотношениями:
Подставив (7) в (6), получим:

где  - длина базы.
- длина базы.
При равенстве дисперсий  (что практически обычно имеет место) приходим к равенству:
(что практически обычно имеет место) приходим к равенству:  или, переходя к среднему квадратическому отклонению (СКО),
или, переходя к среднему квадратическому отклонению (СКО),

Современные навигационные приемники (модули) потребителей СНС характеризуются достаточно малым СКО  ошибки определения абсолютных координат (Х, Y), значение которого не превышает нескольких метров. Примером служит навигационный приемник МНП-М7, абсолютная инструментальная погрешность которого при доверительной вероятности 0,95 (т.е.
ошибки определения абсолютных координат (Х, Y), значение которого не превышает нескольких метров. Примером служит навигационный приемник МНП-М7, абсолютная инструментальная погрешность которого при доверительной вероятности 0,95 (т.е.  ) в кодовом дифференциальном режиме при скорости движения до 515 м/с не более 2 м
) в кодовом дифференциальном режиме при скорости движения до 515 м/с не более 2 м  [7]. Поскольку компенсируемые при формировании относительных координат ΔХ, ΔY эфемеридные и ионосферные ошибки составляют 70% (приблизительно) [1] полной ошибки
[7]. Поскольку компенсируемые при формировании относительных координат ΔХ, ΔY эфемеридные и ионосферные ошибки составляют 70% (приблизительно) [1] полной ошибки  можно полагать, что
можно полагать, что  Приняв длину базы в=2м (среднее расстояние между наплечными МСН экипажа ЛА), в соответствии с (8) получим
Приняв длину базы в=2м (среднее расстояние между наплечными МСН экипажа ЛА), в соответствии с (8) получим  т.е.
т.е.  Такой результат укладывается в указанную ранее приемлемую погрешность курсоуказания 10°-20°.
Такой результат укладывается в указанную ранее приемлемую погрешность курсоуказания 10°-20°.
Понятно, что приведенные значения (не более 9°) соответствуют оптимистической (потенциальной) оценке точности заявляемого измерителя. Реальные цифры будут выше в силу ряда возмущающих факторов, действующих на практике (переотражение и затенение спутниковых сигналов элементами конструкции кабины, помехи радиосвязи между комплектами, перемещение членов экипажа, вибрации и др.). Вместе с тем, можно ожидать, что превышение приведенного уровня погрешностей (с учетом имеющегося запаса точности) будет приемлемым.
Таким образом, заявляемое изобретение может быть реализовано и позволяет обеспечить высокую боевую эффективность измерителя курса пилотируемого ЛА.
Источники информации:
1. ГЛОНАСС. Принципы построения и функционирования/Под ред. А.И. Перова, В.Н. Харисова. Изд. 4-е, перераб. и доп.-М.: Радиотехника, 2010.
2. Патент RU 2241208.
3. Основы радионавигационных измерений/В.А. Губин, А.А. Костылев, Б.Г. Мельников, М.Г. Степанов и др.: Под ред. Клюева Н.Ф. - МО СССР, 1987.
4. Белоусов Н.А., Каплин А.Ю. Комплекс разведки, управления и связи 83т215. - В кн.: «История отечественной радиоэлектронной техники для Сухопутных войск»/Под. ред. С.В. Хохлова. - М.: ООО «Издательский дом «Столичная энциклопедия», 2018. - с. 406-410.
5. Комплект НАЗ-ИР. Российских военных летчиков оденут в специальные жилеты-разгрузки. - Режим доступа: https://tvoi54.ru/posts/2270-komplekt-naz-ir-rossiiskih-voennyh-letchikov-odenut-v-specialnye-zhilety-razgruzki.html.
6. М.В. Михайлов, И.И. Ларьков. Решение задачи относительной навигации по измерениям глобальной спутниковой навигационной системы при сближении космических аппаратов. - Труды МФТИ. - 2011, Том 3, №3. Аэрокосмические исследования, прикладная механика. - с. 79-87.
7. Приемник навигационный МНП-М7. Руководство по эксплуатации ЦВИЯ.468157.113.РЭ. - Режим доступа: irz.ru>uploads/files/262.pdf.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ЦЕЛЕУКАЗАНИЯ И НАВЕДЕНИЯ НА НАЗЕМНЫЕ ЦЕЛИ ПИЛОТИРУЕМЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2789606C1 |
| ИЗМЕРИТЕЛЬ КУРСА ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2241208C1 |
| МОДУЛЬНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ПАРАШЮТИСТА | 2018 |
|
RU2681241C1 |
| Система посадки летательного аппарата на корабль с применением цифровых технологий | 2020 |
|
RU2734173C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2023 |
|
RU2801013C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ | 2003 |
|
RU2231478C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2830721C1 |
| БОЕВАЯ МАШИНА | 2010 |
|
RU2442097C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| Комплекс бортового радиоэлектронного оборудования вертолета | 2021 |
|
RU2771577C1 |
Изобретение относится к измерительным комплексам и системам летательных аппаратов (ЛА). Измеритель содержит два аналогичных автономных комплекта, встроенные в экипировку экипажа ЛА (пилот, штурман). Каждый комплект включает модули спутниковой навигации, радиосвязи, индикации и вычислений, размещенные в плечевых и поясной частях транспортного жилета и на бедре (модуль индикации) члена экипажа. Курсовой угол, определяемый как угол между продольной осью ЛА и географическим меридианом, вычисляется по относительным (разностным) координатам наплечных модулей спутниковой навигации с учетом внутрикабинной рассадки экипажа. Обмен абсолютными координатами модулей между комплектами выполняется модулями радиосвязи в режиме встречной приемопередачи данных. Изобретение позволяет обеспечить рациональный состав, сочетаемость с экипировкой экипажа и высокую надежность измерителя курса и тем самым повысить боевую эффективность ЛА, оснащенного измерителем. 1 ил.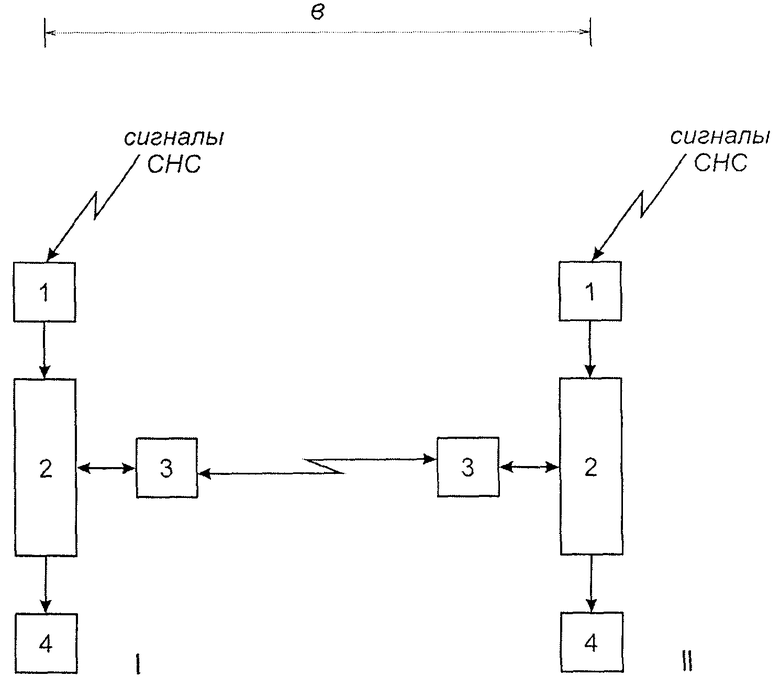
Измеритель курса пилотируемого летательного аппарата (ЛА), содержащий два модуля спутниковой навигации и вычислительный модуль, выполняющий расчет курсового угла, отличающийся тем, что измеритель дополнительно снабжен вторым аналогичным вычислительным модулем, двумя модулями радиосвязи, выполненными с возможностью встречной приемопередачи данных, и двумя модулями индикации, при этом вычислительные модули через соответствующие интерфейсы попарно связаны с модулями спутниковой навигации, модулями радиосвязи и модулями индикации, причем первые вычислительный модуль и модули спутниковой навигации и радиосвязи размещены соответственно в поясной и плечевых частях транспортного жилета первого члена экипажа ЛА, первый модуль индикации размещен поверх летного костюма на его бедре, а вторые аналогичные модули так же размещены в транспортном жилете и на бедре второго члена экипажа ЛА.
| ИЗМЕРИТЕЛЬ КУРСА ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2241208C1 |
| МОДУЛЬНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ПАРАШЮТИСТА | 2018 |
|
RU2681241C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2019 |
|
RU2707091C1 |
| СПОСОБ ИЗМЕРЕНИЯ КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2178145C1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
