Изобретение относится к авиастроению и может быть использовано при установке навесных устройств (далее - агрегатов) на планер летательного аппарата (далее -ЛА) для оценки точности позиционирования агрегатов относительно обводов планера ЛА.
Точность позиционирования навесных агрегатов относительно планера ЛА имеет важное значение для работы авиационного комплекса. Не соблюдение требований в части точности установки агрегата может привести к некорректному функционированию не только самого агрегата, но и авиационного комплекса в целом. В общем виде положение агрегата относительно ЛА определяется совокупностью линейных и угловых координат: (х; у; z; ϕх; ϕу; ϕ2). Однако, для функционирования подавляющего большинства агрегатов важное значение представляет соблюдение точности установки именно по угловым координатам, поскольку величина отклонения при неточности по линейным координатам остается постоянной, а по угловым координатам изменяется в сторону увеличения по линейному закону, что приводит к значительным отклонениям на больших расстояниях.
Известен Способ установки изделия в заданное пространственное положение и устройство для его осуществления (патент RU 2226168; МПК B64F 5/00, G01B 11/00, G01 11/02, G01B 21/00, опубликовано: 27.03.2004). Способ заключается в том, что в рабочем пространстве задается базовая система координат, а с поверхностью изделия связываются не менее трех носителей базовых точек, не лежащих на одной прямой, установленных на базовых поверхностях изделия непосредственно или с помощью переходного калибра. При этом расчетное положение базовых точек изделия в рабочем пространстве определяется с помощью соответствующего количества внешних носителей базовых точек, геометрически ответных носителям базовых точек изделия, и внешние носители базовых точек, установленные на модулях трехкоординатных перемещений, перемещают раздельно и независимо по координатным направлениям под контролем внешней инструментальной системы координатных измерений до достижения заданных значений координат. После установки внешних носителей базовых точек в заданное положение носители базовых точек изделия и внешних базовых точек непосредственно совмещаются и взаимно фиксируются. Недостаток способа заключается в том, что для его реализации используется промежуточная база (опорная площадка) и, кроме того, при реализации способа предполагается точная выставка модулей координатных перемещений, что предполагает дополнительные работы по позиционировании, что увеличивает трудоемкость и предполагает наличие дополнительного оборудования.
Известна Система и способ для выравнивания систем координат агрегатов летательного аппарата (патент СА2270737 (С); МПК B64F 5/00, G01B 11/00, G01B 11/03; опубликовано 23.01. 2007). Способ применяется для выравнивания двух деталей (узлов) относительно друг друга. При реализации способа рассматривается две системы координат связанные с указанными деталями (узлами). Способ выравнивания первой системы координат относительно второй системы координат содержит: определение первой координаты в первой системе координат от первого отражателя с использованием первого координатного позиционирующего устройства, определение второй координаты во второй системе координат от второго отражателя с использованием второго координатного позиционирующего устройства и определение третьей координаты во второй системе координат от третьего отражателя с использованием второго координатного позиционирующего устройства. При этом второй отражатель, расположен на первом заданном расстоянии от первого отражателя, а третий отражатель расположен на втором заданном расстоянии от первого отражателя. Используя значения первого и второго расстояний, с помощью процессора производят выравнивание систем координат двух деталей (узлов).
Недостатком способа является конструктивная сложность исполнения, а также сложность алгоритма, заложенного в процессор.
Прототипом изобретения является Способ и устройство для дистанционного оптического измерения положения поверхности (патентный документ US 2020223561 (А1); МПК B64F 5/60, G01B 11/00, B64F 5/10; опубликовано 16.07.2020). При реализации способа производится оценка позиционирования навесного агрегата относительно внешних поверхностей планера ЛА с помощью излучателя, реализующего сканирующий луч и приемников. Устройство для реализации представляет собой сеть, содержащую центрально расположенный контроллер сбора данных и множество дистанционно расположенных модулей датчиков, установленных в различных местоположениях в пределах диапазона беспроводной связи центрального приемника. Каждый сенсорный модуль установлен на зажиме, выполненном специфичным к местоположению оцениваемой поверхности. Оптические компоненты модулей датчиков выбраны с возможностью индикации линейного положения измеряемой поверхности, относительно предварительно выставленного положения и последующей передачи результатов измерений, которые принимаются контроллером сбора данных, содержащим программное обеспечение, для вычисления и отображения пространственного положение поверхностей.
Недостатком прототипа является применение беспроводного способа передачи информации, что приводит к электромагнитным помехам, а также необходимость проведения предварительных работ при начале оценки, заключающихся в проведение нивелировки ЛА.
Изобретение было создано при решении технической задачи- разработки способа позиционирования навесных устройств относительно внешних поверхностей планера летательного аппарата без предварительной нивелировки ЛА.
Поставленная задача решается способом оценки позиционирования навесного агрегата относительно внешних поверхностей планера летательного аппарата с помощью излучателя, реализующего сканирующий луч и приемников, отличающийся тем, что при технологической подготовке реализации способа, на планере летательного аппарата (ЛА) задают главную группу из трех реперных точек, не лежащих на одной прямой, таким образом, чтобы, заданная ими плоскость - базовая плоскость один, соответствовала плоскости симметрии ЛА, одновременно задают две реперные точки таким образом, чтобы, включающая их плоскость, перпендикулярная базовой плоскости один - базовая плоскость два, соответствовала нивелировочной плоскости ЛА, также задают нулевую реперную точку - реперную точку, лежащую в плоскости симметрии ЛА и принадлежащую главной группе, после чего осуществляют построение базовой плоскости три, таким образом, чтобы указанная плоскость, проходила через данную нулевую реперную точку и была перпендикулярно базовым плоскостям один и два, далее на внешней поверхности навесного агрегата задают две реперные точки, определяющие базовую линию навесного агрегата, характеризующую положение навесного агрегата в пространстве, для идеально установленного навесного агрегата, с использованием проекций его базовой линии на базовые плоскости ЛА, определяют требуемые значения углов положения базовой линии навесного агрегата по курсу, тангажу и крену, при оценке позиционирования фактически установленного навесного агрегата, на реперные точки ЛА шарнирно закрепляют подвесы с излучателем и приемниками, а на реперные точки навесного агрегата шарнирно закрепляют подвесы с приемниками при этом, подвес с излучателем закрепляют на нулевой реперной точке, лучом излучателя сканируют пространство и фиксируют положения соответствующих приемников относительно излучателя в виде фиксированных точек, через фиксированные точки, подвесы которых закреплены на трех реперных точках ЛА, образующих главную группу, строят вспомогательную плоскость один, через фиксированные точки, подвесы которых закреплены на двух других реперных точках ЛА, перпендикулярно вспомогательной плоскости один, строят вспомогательную плоскость два, через фиксированную точку, подвес которой закреплен на нулевой реперной точке ЛА, перпендикулярно вспомогательным плоскостям один и два, строят вспомогательную плоскость три, через фиксированные точки, подвесы которых закреплены на реперных точках навесного агрегата, строят вспомогательную линию навесного агрегата, с использованием проекций вспомогательной линии навесного агрегата на вспомогательные плоскости ЛА, определяют значения углов положения вспомогательной линии агрегата относительно вспомогательных плоскостей ЛА по курсу, тангажу и крену, сравнивают полученные результаты измерений положения вспомогательной линии фактически установленного навесного агрегата с требуемыми значениями положения базовой линии идеально установленного навесного агрегата и принимают решение о правильности установки или необходимости корректировки позиционирования установленного навесного агрегата.
Технический результат при реализации изобретения, являющийся решением поставленной технической задачи, заключается в отсутствии необходимости проведения дополнительных подготовительных работ, таких как нивелировка ЛА, а также автоматизация измерительного процесса со снижем риска возникновения ошибки вызванной человеческим фактором.
Для пояснения сущности изобретения используются следующие графические материалы
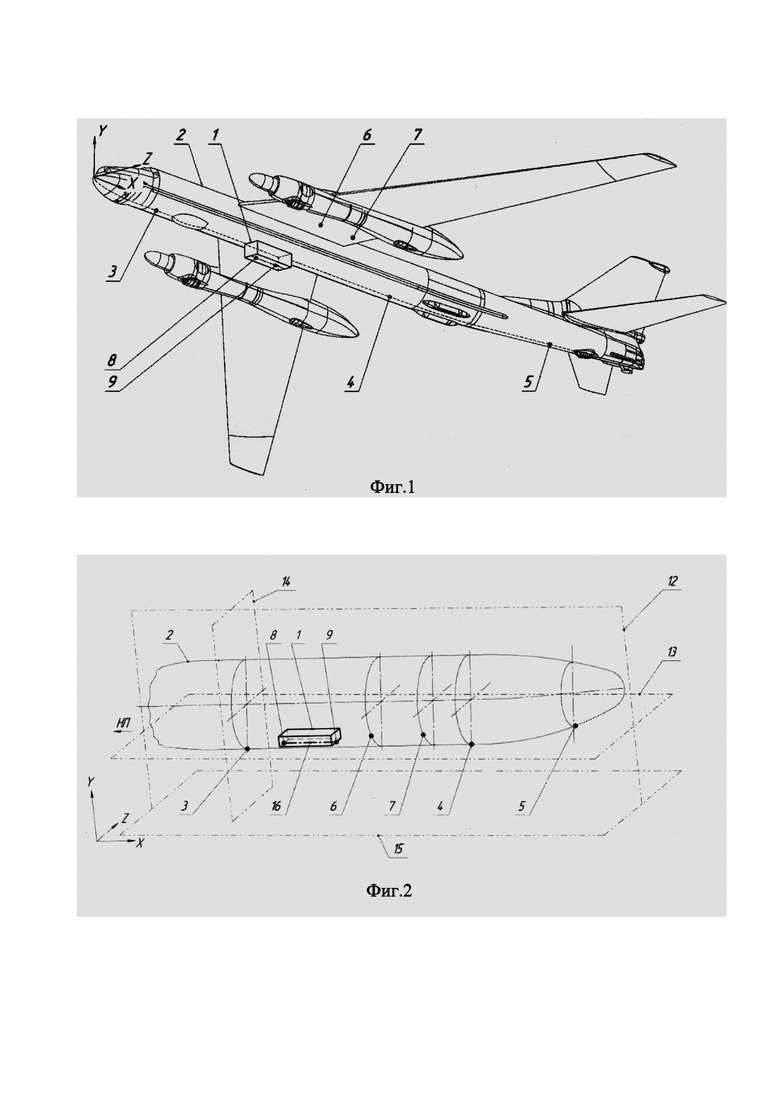
Фиг. 1 Размещения навесного агрегата на ЛА. Задание реперных точек на ЛА и агрегате;
Фиг.2 Построение базовых плоскостей ЛА и базовой линии навесного агрегата по реперным точкам;
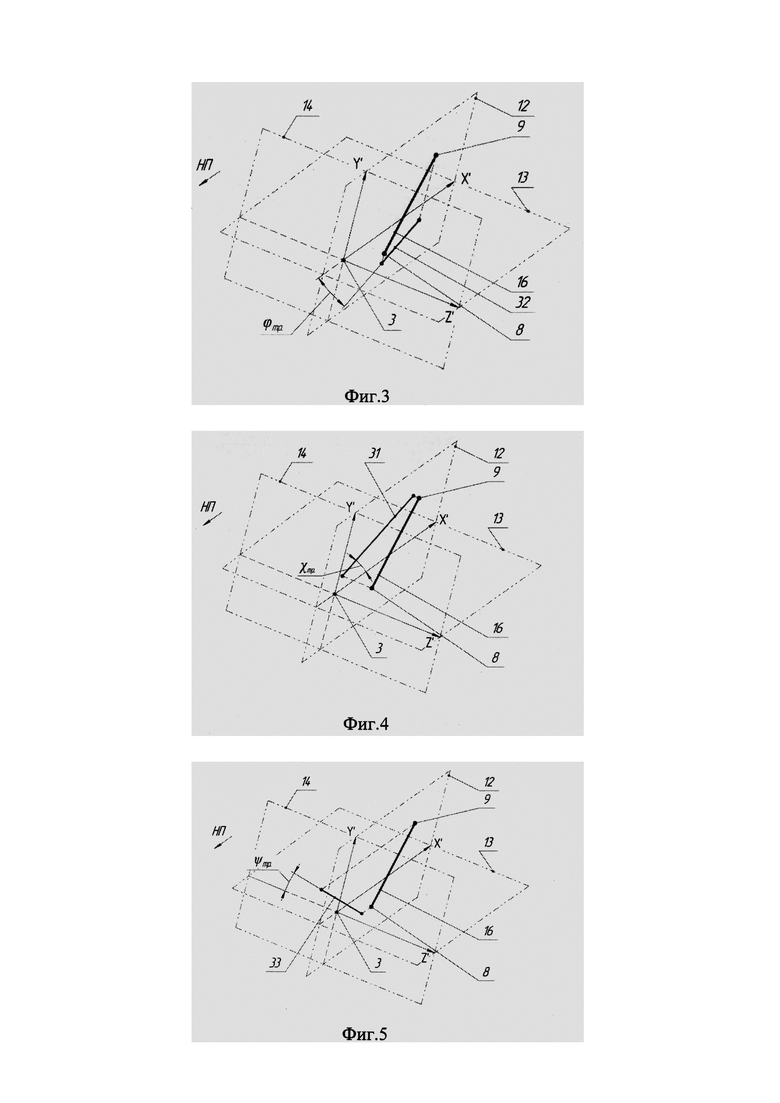
Фиг. 3 Определение угла положения базовой линии идеально установленного агрегата относительно базовых плоскостей ЛА по курсу;
Фиг. 4 Определение угла положения базовой линии идеально установленного агрегата относительно базовых плоскостей ЛА по тангажу;
Фиг. 5 Определение угла положения базовой линии идеально установленного агрегата относительно базовых плоскостей ЛА по крену;
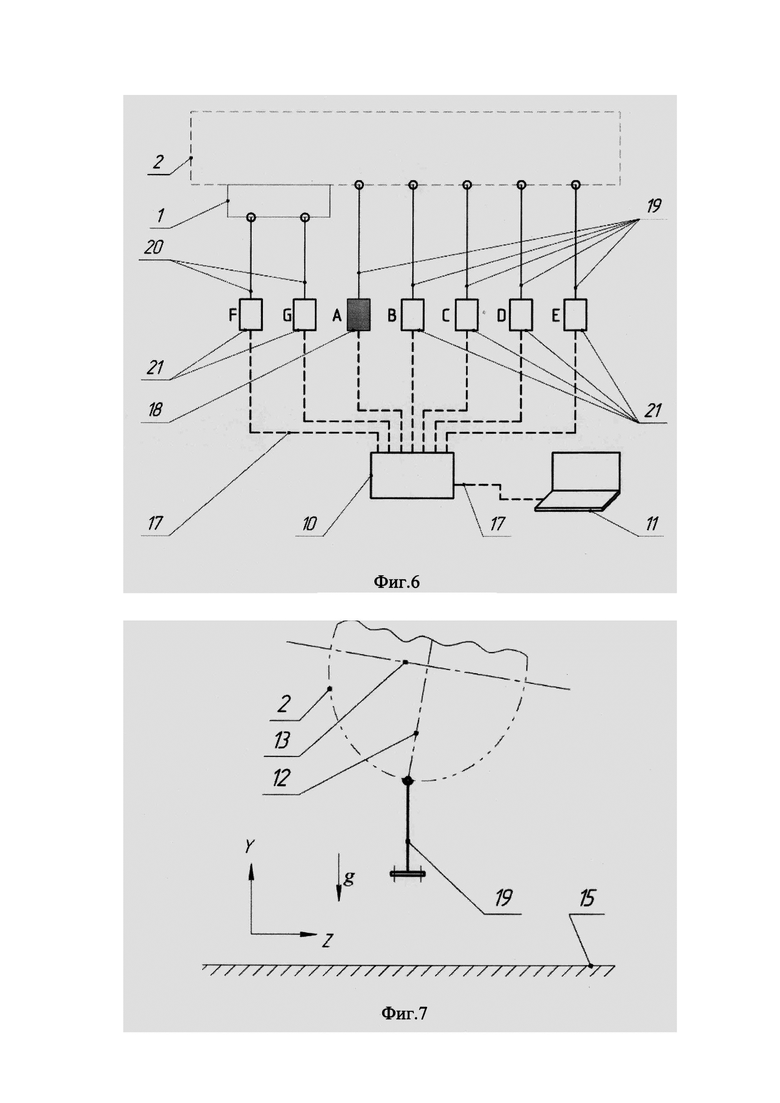
Фиг. 6 Функциональная схема устройства, используемого для реализации способа;
Фиг. 7 Схема установки подвеса на реперную точку;
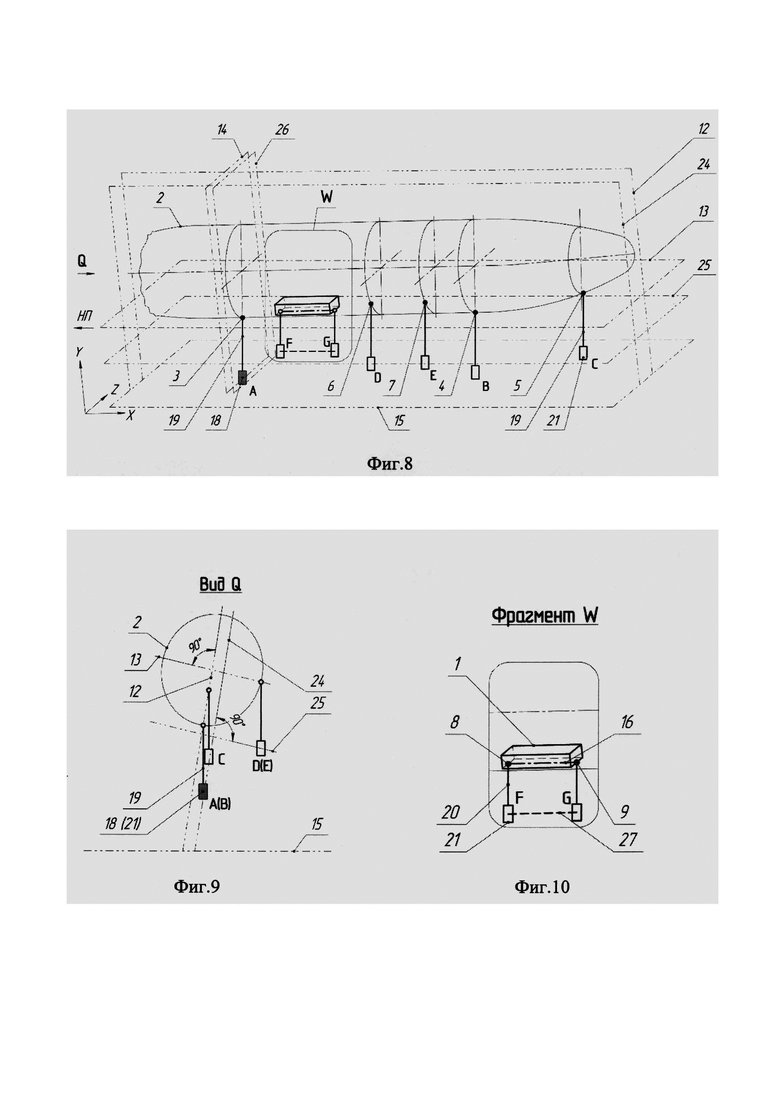
Фиг. 8 Реализация способа для фактически установленного навесного агрегата. Установка подвесов;
Фиг 9. Вид Q Фиг. 8;
Фиг. 10 Фрагмент W Фиг. 8 (увеличено);
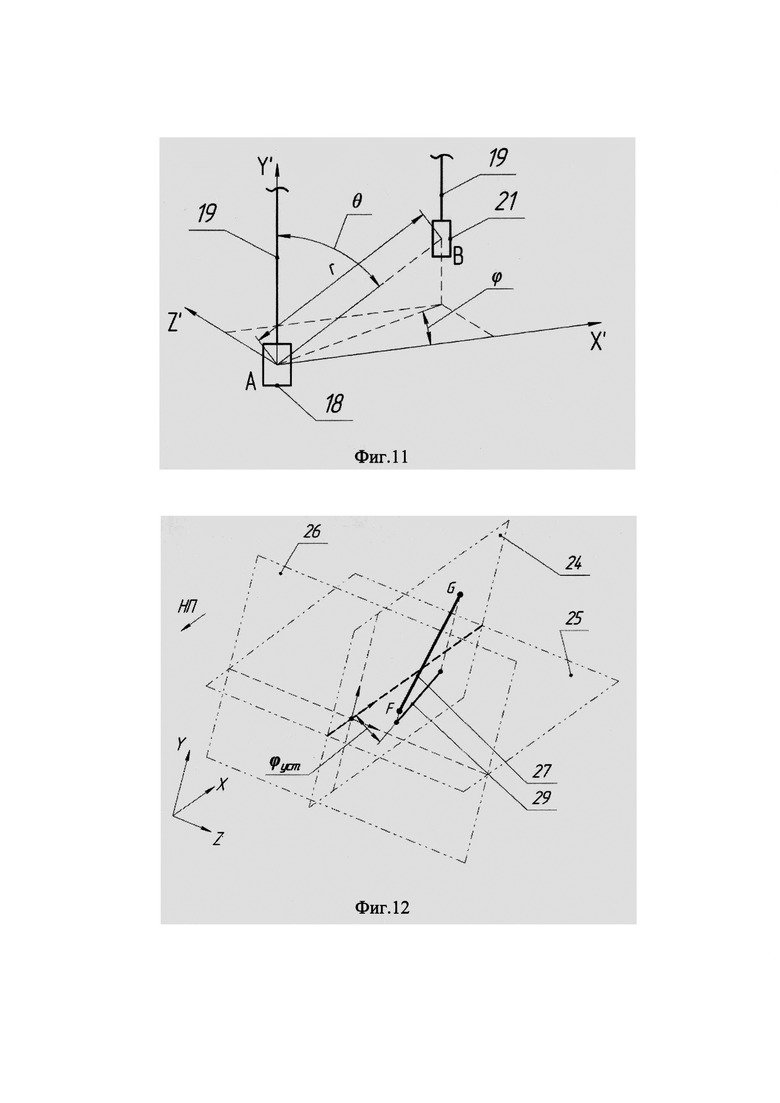
Фиг. 11 Пример определения координат приемников путем пространственного сканирования;
Фиг. 12 Определение угла положения вспомогательной линии агрегата, относительно вспомогательных плоскостей ЛА по курсу;
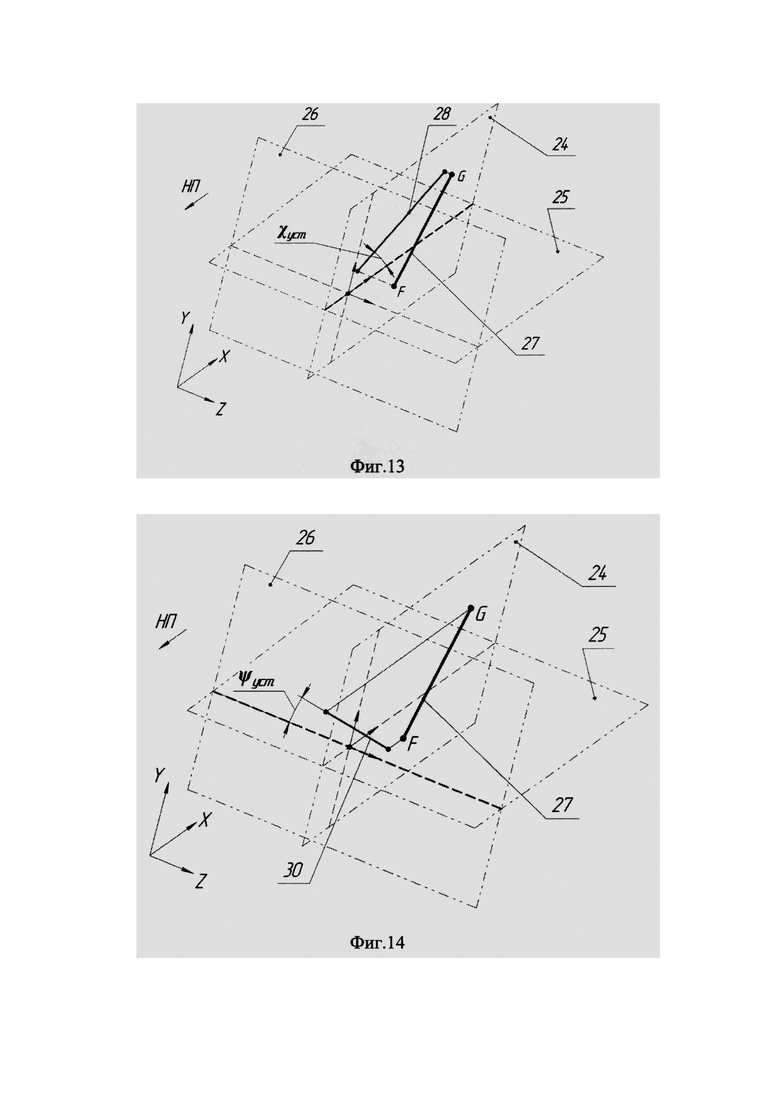
Фиг. 13 Определение угла положения вспомогательной линии агрегата относительно вспомогательных плоскостей ЛА по тангажу;
Фиг. 14 Определение угла положения вспомогательной линии агрегата относительно вспомогательных плоскостей ЛА по крену;
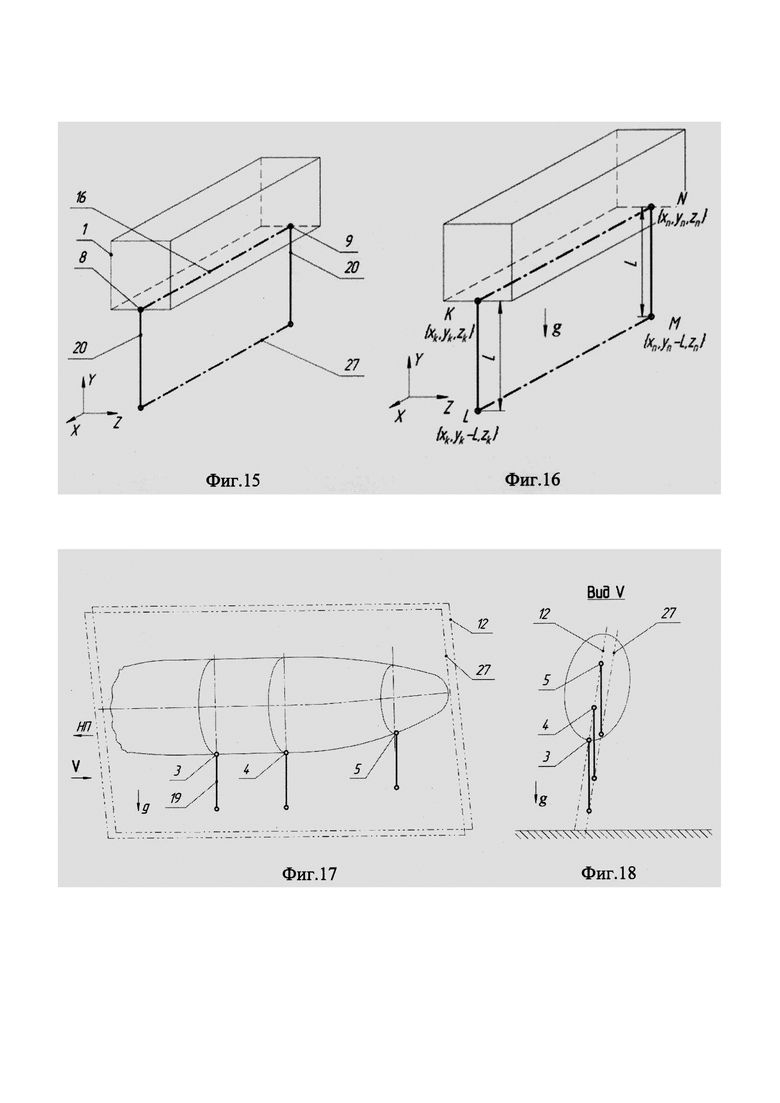
Фиг. 15 Графический материал исходных данных для подтверждения параллельности вспомогательной и базовой линий агрегата (утверждение №1);
Фиг. 16 Графический материал для доказательства параллельности вспомогательной и базовой линий агрегата (утверждение №1);
Фиг. 17 Графический материал исходных данных для подтверждения параллельности соответствующих вспомогательных и базовых плоскостей ЛА.. (утверждение №2);
Фиг. 18 Вид V Фиг. 17;
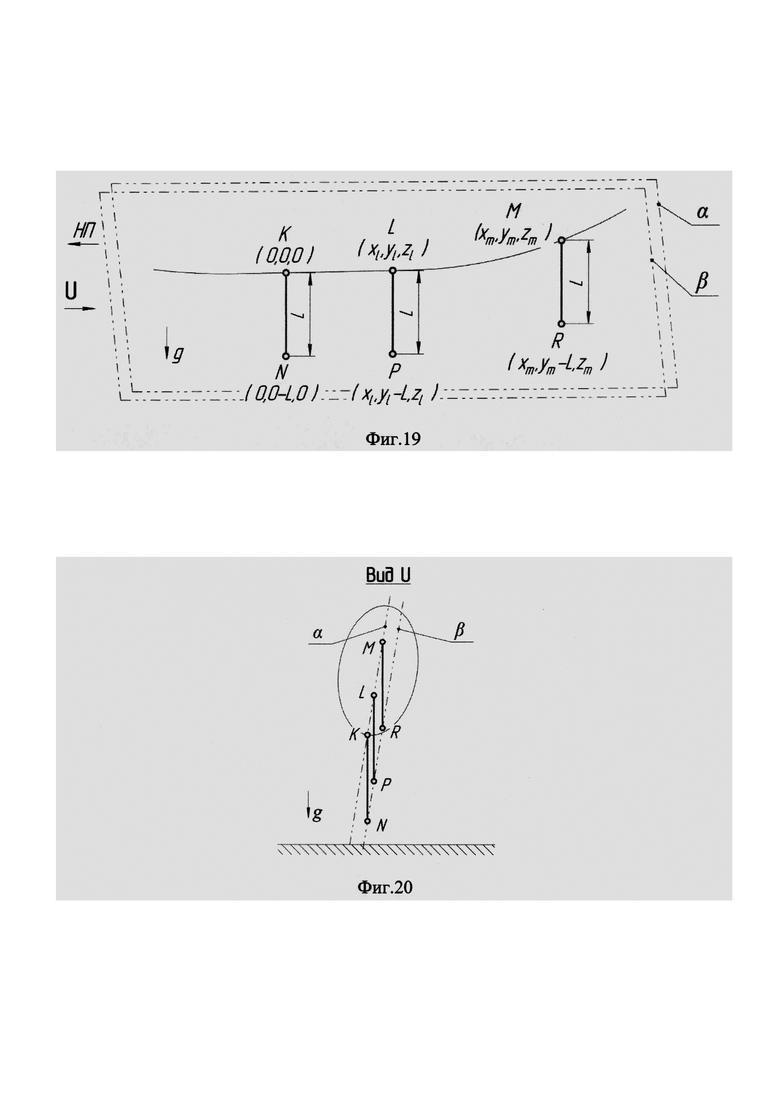
Фиг. 19 Графический материал для доказательства параллельности соответствующих вспомогательных и базовых плоскостей (утверждение №2);
Фиг. 20 Вид U Фиг. 19.
При составлении описания и формулы изобретения используется понятие «реперная точка». «Реперная точка» - конструктивно заложенная точка на внешнем обводе планера ЛА или внешним обводе навесного агрегата, (Фиг. 1) и используемая при технологической реализации способа.
Терминология в формуле и описании используется в соответствии с ГОСТ 22833-77: Характеристики самолета геометрические. Термины, определения и буквенные обозначения, или объясняется посредством графических материалов.
Изобретение реализуется следующим образом.
При технологической подготовке реализации способа (Фиг. 1), которая может проводиться одновременно с конструкторской проработкой оснащения ЛА 2 навесными агрегатами 1, например, радиолокационными устройствами, внешними излучателями или приемниками различных видов и т.п.при идеальной установке агрегата, соответствующей конструкторскому замыслу, на планере ЛА, задают главную группу из трех реперных точек 3, 4, 5, не лежащих на одной прямой, таким образом, чтобы, заданная ими плоскость - базовая плоскость один 12 (Фиг. 2), соответствовала плоскости симметрии ЛА, одновременно, задают две реперные точки 6, 7 таким образом, чтобы, включающая их плоскость, перпендикулярная базовой плоскости один 12 -базовая плоскость два 13, соответствовала нивелировочной плоскости ЛА, также задают нулевую реперную точку 3 - реперную точку, лежащую в плоскости симметрии ЛА и принадлежащую главной группе из трех точек 3, 4, 5, после чего осуществляют построение базовой плоскости три 14 таким образом, чтобы указанная плоскость, проходила через данную нулевую реперную точку 3 и была перпендикулярно базовым плоскостям один 12 и два 13.
Далее на внешней поверхности агрегата 1 задают (Фиг. 1, 2) две реперные точки 8, 9, определяющие базовую линию 16 навесного агрегата, характеризующую положение агрегата в пространстве.
Реперные точки 3-9 задаются, предпочтительно, на нижних поверхностях, с учетом обеспечения дальнейшей реализации способа.
Для идеально установленного навесного агрегата (Фиг. 3, 4, 5), по компоновке, соответствующей конструкторскому замыслу, используя проекции базовой линии 16 агрегата на базовые плоскости ЛА 12, 13, 14, определяют значения углов положения базовой линии 16 навесного агрегата, относительно базовых плоскостей ЛА по курсу (ϕтр.), тангажу (χтp) и крену (ψTp).
Значения могут быть получены путем графических построений и математических вычислений.
Значение угла положения базовой линии 16 агрегата по курсу ϕтр будет соответствовать углу между ее проекцией 32 на базовую плоскость два 13 и базовой плоскостью один 12 (Фиг. 3).
Значение угла положения базовой линии 16 агрегата по тангажу χтр будет соответствовать углу между ее проекцией 31 на базовую плоскость один 12 и базовой плоскостью два 13 (Фиг. 4)
Значение угла положения базовой линии 16 агрегата по крену ψnp, будет соответствовать углу между ее проекцией 33 на базовую плоскость три 14 и базовой плоскостью два 12 (Фиг. 5).
Приведенные выше значения углов положения базовой линии 16 для идеально установленного навесного агрегата, относительно базовых плоскостей ЛА по курсу (ϕтр.), тангажу (χтр.) и крену ψтр.). принимают как требуемые значения и записывают их в паспортные данные, с учетом назначенных полей допуска.
Очевидно, что при оценке позиционирования фактически установленного навесного агрегата относительно ЛА требуется определить фактические углы положения его базовой линии 16 по курсу (ϕф), тангажу (χф) и крену (ψф.) относительно базовых плоскостей ЛА 12, 13, 14 и сравнить их с требуемыми значениями.
В предлагаемом способе используется сравнение положений фактически установленного агрегата с требуемым положением идеально установленного агрегата относительно базовых плоскостей ЛА 12, 13, 14, построенных по реперным точкам 3, 4, 5, 6, 7. Либо иначе говоря сравнивают положение базовой линии 16 фактически установленного навесного агрегата 1 с требуемым положением базовой линии 16 идеально установленного агрегата.
Однако, в виду сложности визуализации базовых плоскостей 12, 13, 14 ЛА и базовой линии 16 агрегата в реальной обстановке, например, на аэродромах или ремонтных ангарах, прибегают к дополнительным манипуляциям суть которых заключается в построении вспомогательных плоскостей ЛА и вспомогательной линии агрегата.
Для технической реализации способа используется измерительное устройство (Фиг. 6), включающая в себя подвесы ЛА 19, подвесы агрегата 20, излучатель с дальномером 18 (А), приемники 21 (В, С, D, Е, F, G), контроллер 10, монитор контроллера 11, а также кабельную сеть 17.
Подвес ЛА 19 также, как и подвес агрегата 20 представляет собой штангу, один конец корой шарнирно закрепляется к реперным точкам ЛА или агрегата, а другой конец снабжен площадкой для закрепления излучателя или приемника (Фиг. 7); при этом наличие в конструкции шарнира обеспечивает строго вертикальное расположение подвесов вне зависимости от положения ЛА относительно плоскости земли 15.
Подвес ЛА 19 отличается от подвеса агрегата 20 только длинной штанги.
При реализации метода подвесы ЛА 19 закрепляют к реперным точкам 3, 4, 5, 6, 7 ЛА, а подвесы агрегата 20 - к реперным точкам 8, 9 агрегата (Фиг. 8-10).
На подвес ЛА 19, размещенный на нулевой реперной точке 3 устанавливают излучатель 18 (А), а на остальные подвесы ЛА 19 и подвесы агрегата 20 устанавливают приемники 21 (В, С, D, Е, F, G). С помощью кабельной сети 17 осуществляют подключение излучателя 18 и приемников 21 к контроллеру 10, а контроллера к монитору 11.
При установке подвесов ЛА 19 и подвесов агрегата 20 конструктивно обеспечивается требование, чтобы сканирующий луч излучателя 18 имел возможность быть зарегистрированным всеми шестью приемниками 21, расположенными на других подвесах.
Лучом излучателя 18 сканируют пространство (Фиг. 11) и фиксируют координаты (угловое положение и дальность) приемников (В, С, D, Е, F, G) относительно излучателя в виде фиксированных точек.
Дальнейшая оценка позиционирования производится методом математического моделирования с помощью контроллера 10 с выводом результатов на монитор 11. Контроллер снабжен программой для осуществления построения математической модели по фиксированным точкам, а также содержит данные по требуемым значениям углов по курсу тангажу и крену для базовой линии 16 навесного агрегата.
Программа может быть составлена с использованием методик, раскрытых в Голованов Н.Н. Геометрическое моделирование. - М.- Издательство Физико-математической литературы, 2020 - 472 с.
Фиксируемые координаты приемников 21 в сферической системе координат передаются в контроллер 10 в виде цифровых данных.
По представленным данным, с использованием программы контроллера, производится построение математической модели положения точек излучателя и приемников и построение вспомогательных плоскостей ЛА и вспомогательной линии навесного агрегата.
При составлении математической модели:
- Вводится локальная система с началом в излучателе точка «А» 18 (Фиг. 11)
А=(0; 0; 0)
- Поочередно определяются координаты каждого приемника относительно излучателя. Для определения координат используются положение сканирующего луча (горизонтальная и вертикальная проекции) и показания дальномера.
При этом используется сферическая система координат: вертикальная проекция луча 23 определяет угол ϕ, горизонтальная проекция луча 22 - угол θ, а дальномер - расстояние до зафиксированного фотоприемника.
Относительно начала координат точка «A», в сферической системе, координаты всех 6-ти приемников (В, С, D, Е, F, G) представляются в виде:
Для последующих вычислений сферические координаты преобразуются в Декартовы:
Проводят дальнейшие вычисления относительно преобразованных координат излучателя (А) и 6-ти приемников (В, С, D, Е, F, G), представляемых в виде:

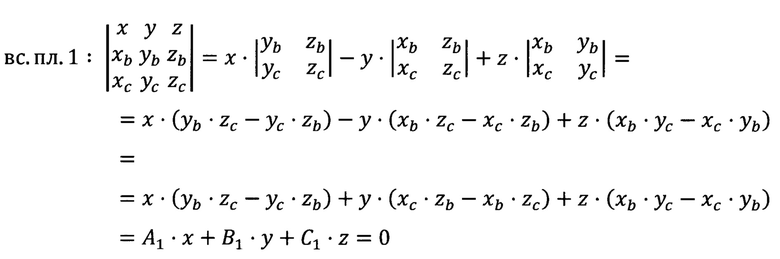
Через зафиксированные точки излучателя (А) и приемников (В, С) подвесы которых шарнирно закреплены к реперным точкам 3, 4, 5 строят вспомогательную плоскость один (вс.пл. 1) 24 описываемую в виде:
По аналогии через зафиксированные точки приемников (D, Е), подвесы которых шарнирно закреплены к реперным точкам 6, 7, перпендикулярно построенной выше вспомогательной плоскости один 24 строят вспомогательную плоскость два (вс. пл. 2) 25, описываемую в виде:

По аналогии через зафиксированную точку излучателя (А), подвес которой шарнирно закреплен к реперной точке 3 перпендикулярно построенным выше вспомогательным плоскостям один 24 и два 25 строят вспомогательную плоскость три (вс. пл. 3) 26, описываемую в виде:

Через зафиксированные точки приемников (F, G), подвесы которых шарнирно закреплены к реперным точкам 8, 9 строят вспомогательную линию навесного агрегата (вс. лин) 27, описываемую в виде:

С помощью алгоритма, заложенного в контроллер 10 определяют проекции вспомогательной линии 27 агрегата на первую 24, вторую 25 и третью 26 вспомогательные плоскости, а после чего определяют значения углов положения вспомогательной линии 27 агрегата по курсу (ϕуст.), тангажу (χycT.) и крену (ψyCT.) (Фиг. 12-14).
Пространственное положение агрегата относительно ЛА определяется положением вспомогательной линии агрегата относительно вспомогательных плоскостей ЛА.
Угол положения вспомогательной линии агрегата, по курсу ϕуст. будет соответствовать углу между проекцией (29) вспомогательной линии 27 агрегата на вспомогательную плоскость два 25 и вспомогательной плоскостью один 24 (вс. пл. 1) (Фиг. 12).
Угол положения вспомогательной линии агрегата по тангажу χуст. будет соответствовать углу между проекцией 28 вспомогательной линии 27 агрегата на вспомогательную плоскость один 24 и вспомогательной плоскостью два 25 (вс. пл.2) (Фиг. 13).
Угол положения вспомогательной линии агрегата по крену ψуст. будет соответствовать углу между проекцией 30 вспомогательной линии 27 агрегата на вспомогательную плоскость три 26 и вспомогательной плоскостью два 25 (вс. пл. 2) (Фиг. 14).
Реализация способа основана на том, что углы положения вспомогательной линии 27 навесного агрегата относительно вспомогательных плоскостей 24-26 тождественно равны углам положения базовой линии 16 реально установленного агрегата 1, относительно базовых плоскостей ЛА 12-14, что доказывается следующими утверждениями:
Утверждение 1: В виду равенства длин 2-х подвесов агрегата 20 между собой обеспечивается параллельность вспомогательной линии агрегата 27 и базовой линии реально установленного агрегата 16 - линии, проходящей через реперные точки 8, 9 на навесном агрегате однозначно задающей его положение в пространстве.
Утверждение 2: В виду равенства длин 5-ти подвесов ЛА 19 между собой обеспечивается параллельность соответствующих вспомогательных 24, 25, 26 и базовых 12, 13, 14 плоскостей ЛА.
Доказательство утверждения №1 (Фиг. 15, 16):
Пусть дан агрегат 1 с реперными точками 8, 9 которые определяют базовую линию агрегата 16; к данным реперным точкам крепятся отвесы 20 одинаковой длины, точки на концах отвесов образуют вспомогательную линию агрегата 27. Необходимо доказать, что вспомогательная линия будет параллельна базовой. Для удобства обозначим реперные точки точками «К» и «N»; а концы подвесов - точками «L» и «М». Таким образом необходимо доказать параллельность прямых KN и LM.
Пусть точки «К» и «N» имеют координаты (xk, ук, zk) и (xn, yn, zn) соответственно.
Поскольку подвесы закреплены шарнирно, то под действием силы тяжести, они будут ориентироваться строго вертикально (параллельно вектору силы тяжести g). Следовательно, координаты точек «L», «М» будут отличатся от координат точек «K», «N» только по оси Y на величину длины подвесов L.
Тогда точки «L» и «М» имеют координаты (xk, yk-L, zk) и (xn, yn-L, zn) соответственно.
Из аналитической геометрии известно уравнение прямой АВ в пространстве, проходящей через 2 точки «А», «В»:
прямая АВ: 
или
прямая АВ: 
где m, n, р - координаты вектора, задающего данную прямую АВ.
Возвращаясь к нашей задаче запишем уравнения прямой KN и определим координаты ее вектора:
пр. KN: 
Запишем уравнения прямой LM и определим координаты ее вектора:
Из аналитической геометрии известно условие параллельности двух прямых (прямые №1 и №2):
Возвращаясь к нашей задаче проверим условие параллельности прямых KN и LM:
Очевидно, что равенство выполняется.
Следовательно, прямая KN параллельна прямой LM либо иначе базовая прямая 16 навесного агрегата параллельна вспомогательной 27. Утверждение доказано!
Доказательство утверждения №2 (Фиг. 17-20):
Пусть дан ЛА 2 с реперными точками 3, 4, 5 которые определяют первую базовую плоскость 12 ЛА совпадающую с плоскостью симметрии ЛА; к указанным реперным точкам крепятся отвесы ЛА 19 одинаковой длины, точки, образованные нижними концами отвесов, образуют первую вспомогательную плоскость 27 ЛА. Необходимо доказать, что первая вспомогательная плоскость 27 будет параллельна первой базовой 12 плоскости ЛА. Для удобства обозначим реперные точки 3, 4, 5 точками «K», «L» и «М»; а концы подвесов, закрепленных на соответствующих реперных точках - точками «N», «Р» и «R» (Фиг. 19, 20). Таким образом необходимо доказать параллельность плоскостей KLM (плоскость α) и NPR (плоскость β).
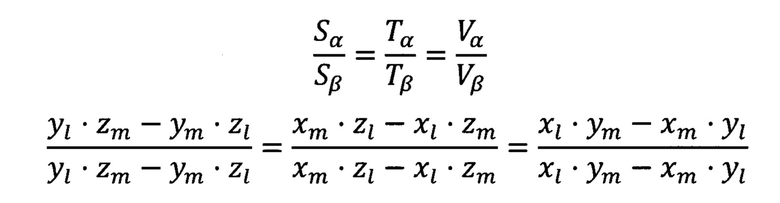
Пусть точки «K», «L» и «М» имеют координаты (xk, ук, zk), (xl, yl, zl) и (xm, ym, zm) соответственно. Для упрощения последующих выражений (но без ущерба для истинны) будем считать, что точка «К» лежит в начале локальной системы координат и имеет координаты (0, 0, 0).
Поскольку подвесы закреплены шарнирно, то под действием силы тяжести, они будут ориентироваться строго вертикально (параллельно вектору силы тяжести g). Следовательно, координаты точек «N», «Р» и «R» будут отличатся от координат точек «К», «L» и «М» только по оси Y на величину длины подвесов L.
Тогда точки «N», «Р», «R» имеют координаты (0, 0-L, 0), (х1, yl-L, zl) и (xm, ym-L, zm) соответственно.
Из аналитической геометрии известно уравнение плоскости, проходящей через 3 точки «1», «2», «3» с координатами (х1,у1, zi), (х2, у2, z2), (х3, у3, z3):
плоскость: 
или
плоскость: 
где S, Т, V - координаты вектора-нормали к данной плоскости. Возвращаясь к нашей задаче запишем уравнение плоскости а, проходящей через точки «K», «L» и «М» и определим координаты ее вектора-нормали:
плоскость 
плоскость 
плоскость 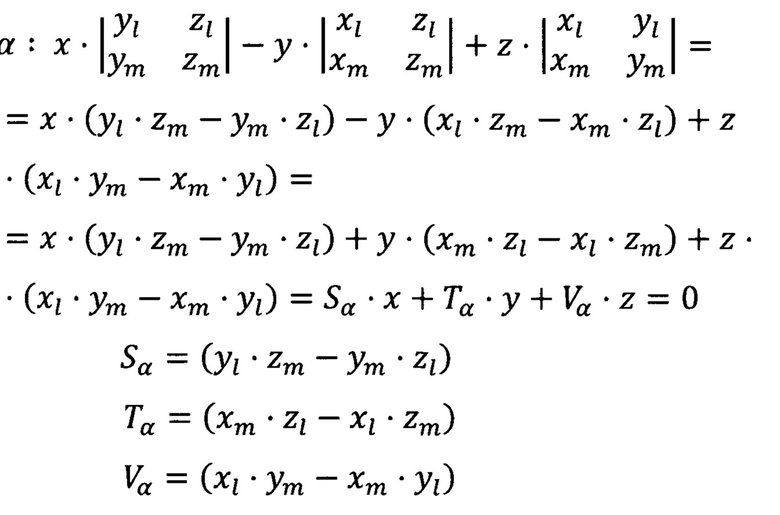
Аналогично запишем уравнение плоскости р, проходящей через точки «N», «Р» и «R» и определим координаты ее вектора-нормали:
плоскость 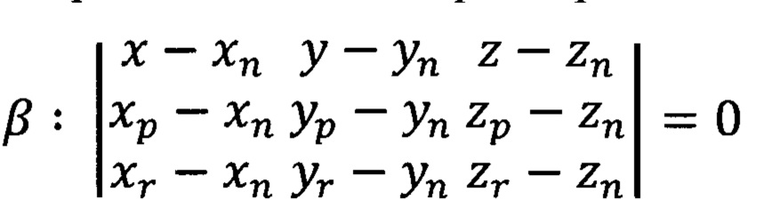
плоскость 
плоскость 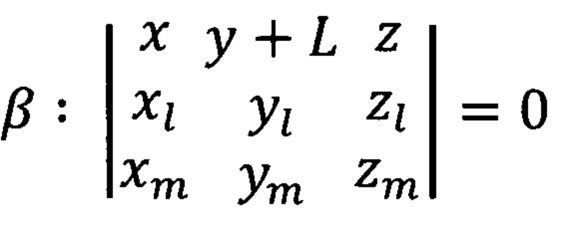
плоскость 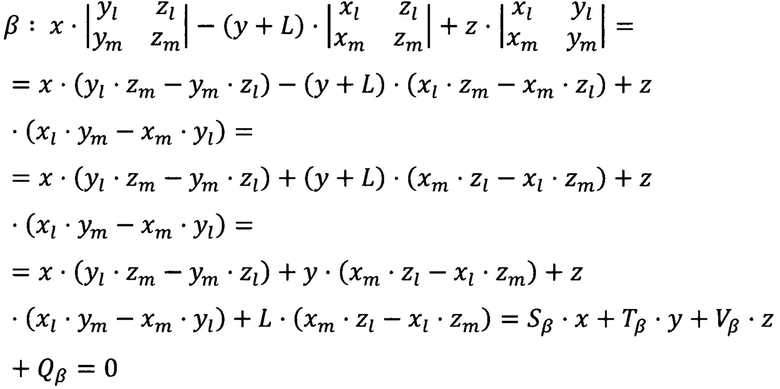
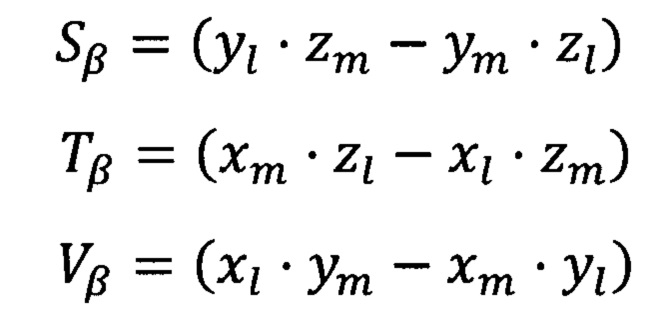
Из аналитической геометрии известно условие параллельности двух плоскостей (плоскости №1 и №2):
S1 Т1 V1
Возвращаясь к нашей задаче проверим условие параллельности плоскостей α и β:
Очевидно, что равенство выполняется.
Следовательно, плоскость (3 параллельна плоскости а либо иначе первая вспомогательная плоскость ЛА 24 параллельна первой базовой плоскости ЛА 12. Утверждение доказано!
Аналогичным образом доказывается параллельность второй 25 и третьей 26 вспомогательных плоскостей по отношению к второй 13 и третьей 14 базовой плоскостям.
Таким образом в виду параллельности базовых и вспомогательных плоскостей ЛА, а также базовой и вспомогательной линий агрегата верно, что:
- Угол между проекцией вспомогательной линии 27 на вспомогательную плоскость 2 и вспомогательной плоскостью 1 будет равен углу между проекцией базовой линии 16 на базовую плоскость 2 и базовой плоскостью 1 и соответствовать углу по курсу;
- Угол между проекцией вспомогательной линии 27 на вспомогательную плоскость 1 и вспомогательной плоскостью 2 будет равен углу между проекцией базовой линии 16 на базовую плоскость 1 и базовой плоскостью 2 и соответствовать углу по тангажу;
- Угол между проекцией вспомогательной линии 27 на вспомогательную плоскость 3 и вспомогательной плоскостью 2 будет равен углу между проекцией базовой линии 16 на базовую плоскость 3 и базовой плоскостью 2 и соответствовать углу по крену.
При оценке позиционирования сравнивают полученные результаты измерений положения по курсу тангажу и крену вспомогательной линии 27 фактически установленного навесного агрегата 1 относительно вспомогательных плоскостей 12-14 с требуемыми значениями положения базовой линии 16 идеально установленного навесного агрегата относительно вспомогательных плоскостей 24-26 и принимают решение о правильности установки или необходимости корректировки агрегата 1, с учетом допустимого поля допуска. Сравнение производится с использованием контроллера 10 с последующей выдачей результатов на монитор 11.
Очевидно, что при реализации изобретения обеспечивается получение технического результата - отсутствие необходимости проведения дополнительных подготовительных работ, таких как нивелировка авиационного комплекса, а также автоматизация измерительного процесса со снижем риска возникновения ошибки вызванной человеческим фактором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценивания по реперным точкам угловых и пространственных координат объекта в оптико-электронной системе позиционирования | 2019 |
|
RU2720076C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| Способ одновременного измерения вектора скорости летательного аппарата и дальности до наземного объекта | 2016 |
|
RU2658115C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2006794C1 |
| КОНСОЛЬ КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА С УСТРОЙСТВОМ ДЛЯ УПРАВЛЕНИЯ ПО КУРСУ | 2017 |
|
RU2674900C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ ПРИ АМПЛИТУДНО-ФАЗОВОЙ ПЕЛЕНГАЦИИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432580C1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| СПОСОБ ИЗМЕРЕНИЯ КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2556286C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2009 |
|
RU2406071C1 |
Изобретение относится к установке навесных устройств на летательный аппарат. Способ оценки позиционирования навесного агрегата относительно внешних поверхностей планера летательного аппарата характеризуется тем, что через фиксированные точки, подвесы которых закреплены на реперных точках ЛА (3-7), строят вспомогательные плоскости (24-26). Через фиксированные точки, подвесы которых закреплены на других реперных точках (8, 9) навесного агрегата (1), строят вспомогательную линию навесного агрегата. Определяют значения углов положения вспомогательной линии относительно вспомогательных плоскостей (24-26) по курсу, тангажу и крену. Сравнивают полученные результаты измерений положения вспомогательной линии фактически установленного навесного агрегата с требуемыми значениями положения базовой линии идеально установленного навесного агрегата и принимают решение о правильности установки или необходимости корректировки позиционирования установленного навесного агрегата. Достигается автоматизация измерительного процесса со снижением риска возникновения ошибки. 20 ил.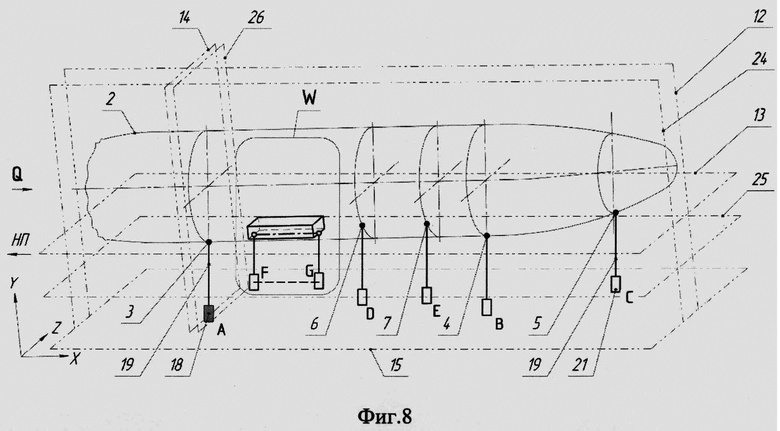
Способ оценки позиционирования навесного агрегата относительно внешних поверхностей планера летательного аппарата с помощью излучателя, реализующего сканирующий луч, и приемников, отличающийся тем, что при технологической подготовке реализации способа на планере летательного аппарата (ЛА) задают главную группу из трех реперных точек, не лежащих на одной прямой, таким образом, чтобы заданная ими плоскость - базовая плоскость один, соответствовала плоскости симметрии ЛА, одновременно задают две реперные точки таким образом, чтобы включающая их плоскость, перпендикулярная базовой плоскости один - базовая плоскость два, соответствовала нивелировочной плоскости ЛА, также задают нулевую реперную точку - реперную точку, лежащую в плоскости симметрии ЛА и принадлежащую главной группе, после чего осуществляют построение базовой плоскости три, таким образом, чтобы указанная плоскость проходила через данную нулевую реперную точку и была перпендикулярна базовым плоскостям один и два, далее на внешней поверхности навесного агрегата задают две реперные точки, определяющие базовую линию навесного агрегата, характеризующую положение навесного агрегата в пространстве, для идеально установленного навесного агрегата, с использованием проекций его базовой линии на базовые плоскости ЛА, определяют требуемые значения углов положения базовой линии навесного агрегата по курсу, тангажу и крену, при оценке позиционирования фактически установленного навесного агрегата на реперные точки ЛА шарнирно закрепляют подвесы с излучателем и приемниками, а на реперные точки навесного агрегата шарнирно закрепляют подвесы с приемниками, при этом подвес с излучателем закрепляют на нулевой реперной точке, лучом излучателя сканируют пространство и фиксируют положения соответствующих приемников относительно излучателя в виде фиксированных точек, через фиксированные точки, подвесы которых закреплены на трех реперных точках ЛА, образующих главную группу, строят вспомогательную плоскость один, через фиксированные точки, подвесы которых закреплены на двух других реперных точках ЛА, перпендикулярно вспомогательной плоскости один, строят вспомогательную плоскость два, через фиксированную точку, подвес которой закреплен на нулевой реперной точке ЛА, перпендикулярно вспомогательным плоскостям один и два, строят вспомогательную плоскость три, через фиксированные точки, подвесы которых закреплены на реперных точках навесного агрегата, строят вспомогательную линию навесного агрегата, с использованием проекций вспомогательной линии навесного агрегата на вспомогательные плоскости ЛА, определяют значения углов положения вспомогательной линии агрегата относительно вспомогательных плоскостей ЛА по курсу, тангажу и крену, сравнивают полученные результаты измерений положения вспомогательной линии фактически установленного навесного агрегата с требуемыми значениями положения базовой линии идеально установленного навесного агрегата и принимают решение о правильности установки или необходимости корректировки позиционирования установленного навесного агрегата.
| US 2020223561 A1, 16.07.2020 | |||
| WO 2017188127 A, 02.11.2017 | |||
| CN 107117329 A, 01.09.2017 | |||
| СПОСОБ СБОРКИ ИЗДЕЛИЯ НА НЕСКОЛЬКИХ РАБОЧИХ ЭТАПАХ, КОМПЛЕКС СБОРОЧНЫХ ПРИСПОСОБЛЕНИЙ И ИСПОЛЬЗУЕМОЕ В НИХ ПЕРЕНОСНОЕ СБОРОЧНОЕ ПРИСПОСОБЛЕНИЕ | 2012 |
|
RU2517920C1 |
| Способ определения положения центра тяжести массивных и крупногабаритных объектов сложной формы | 2022 |
|
RU2809111C1 |

