Изобретение относится к области радиолокации и может быть использовано для определения координат источника непрерывного излучения, например непрерывных шумовых помех.
Непрерывные шумовые помехи являются наиболее простым и в тоже время наиболее распространенным способом постановки помех.
Известны различные способы обнаружения и пеленгации таких помех. Например, известен способ определения пеленга на источник непрерывной помехи и радиолокационное устройство для его осуществления (патент №2608360, МПК G01S 18 7/38), с помощью которого можно определить пеленг на источник непрерывной помехи, в том числе при нестабильности ее уровня.
Недостатком упомянутого способа является невозможность определения точных координат источника непрерывной помехи.
Известен также способ определения координат источника радиоизлучения - постановщика ответной помехи и способ определения координат целей облучаемых постановщиком ответной помехи (патент №2531803, МПК G01S 7/38), с помощью которого возможна пеленгация постановщика помех по его излучениям и целей по отраженным излучениям, обеспечение согласованного приема этих излучений.
Недостатком упомянутого способа является также невозможность определения координат источника непрерывной помехи.
Решаемой задачей является обеспечение возможности автоматического определения координат источника непрерывной шумовой помехи используя одноканальные мобильные радиолокационные станции на борту беспилотных воздушных судов (БВС).
Заявленный технический результат достигается тем, что в способе автоматического обнаружения источника непрерывной шумовой помехи одноканальными радиолокационными станциями (РЛС), основанном на использовании двух БВС: ведущего и ведомого, получении собственного пеленга источника непрерывной шумовой помехи ведущим БВС, а также получении пеленга того же источника непрерывной шумовой помехи ведущим БВС, с ведомого БВС, с учетом: координат, углов визирования, отклонения антенны от равносигнального направления, отклонения от оси «x» в неподвижной системе координат и диаграммы направленности, для ведущего и ведомого, вычислении ведущим БВС области вероятного нахождения источника непрерывной шумовой помехи, вычисления координат вершин области вероятного нахождения источника непрерывной шумовой помехи, соединения вершин двух тупых углов и двух острых углов, поиска точки пересечения получившихся линий, вычисления углов треугольника, образуемого ближайшей к ведущему БВС вершине, и правой относительно остальных вершине, вычислении поправки к координатам вершины области вероятного положения источника непрерывной шумовой помехи и вычислении координат источника непрерывной шумовой помехи.
Согласно изобретению в качестве базы для обнаружения используются два БВС, где с помощью данных с ведомого БВС - ведущий БВС вычисляет координаты источника непрерывной шумовой помехи.
Суть заявляемого способа основывается на следующем.
Непрерывная шумовая помеха является одним из наиболее распространенным видом помех. Ее особенность состоит в том, что она воздействует на приемный тракт РЛС высокой мощностью и вызывает перегрузку приемного тракта, при этом значительно превышая динамический диапазон приемника, таким образом АЦП из состава РЛС формирует отсчеты с максимальной яркостью, теряя полезную информацию. При этом при наличии более одного источника непрерывной шумовой помехи, может потребоваться определить координаты каждого из них, так как некоторые из них могут располагаться дальше зоны действия БВС.
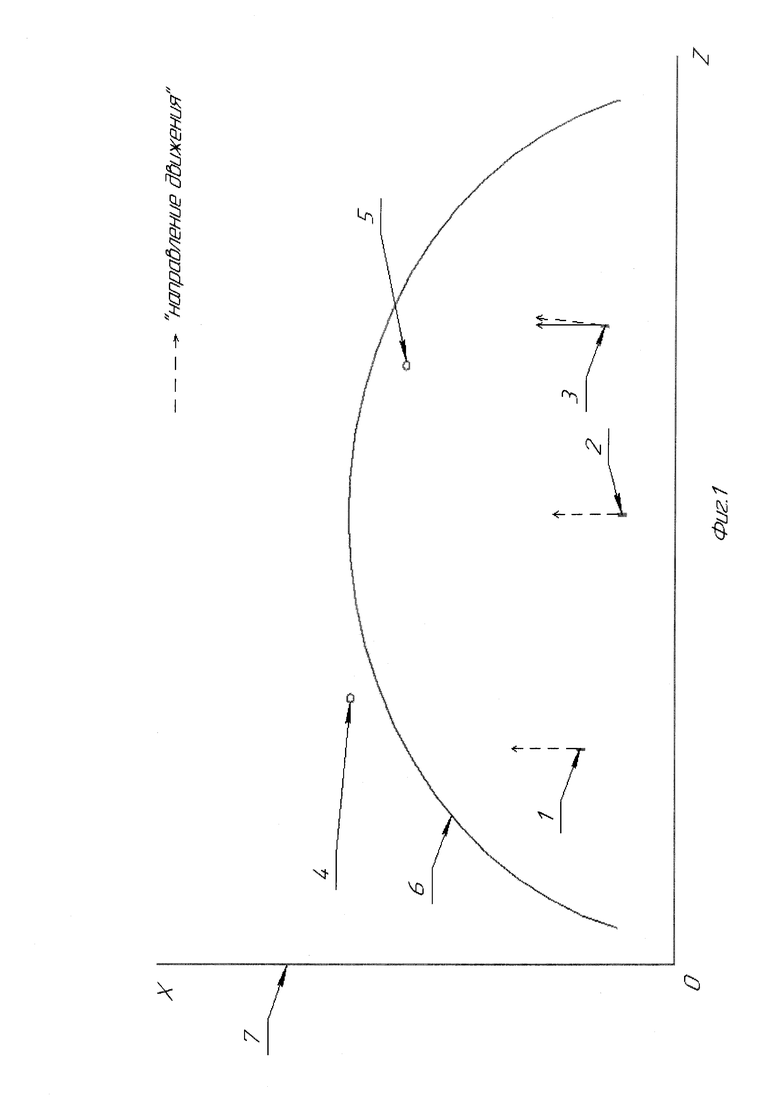
Заявляемое техническое решение предусматривает использование по меньшей мере двух БВС для определения координат источника непрерывной шумовой помехи. Сущность способа поясняется также рисунком Фиг. 1 где приняты следующие обозначения.
1) Первое ведомое беспилотное воздушное судно (ПВЕБВС)
2) Ведущее беспилотное воздушное судно (ВБВС)
3) Второе ведомое беспилотное воздушное судно (ВВЕБВС)
4) Первый источник непрерывной шумовой помехи (ПИНШП)
5) Второй источник непрерывной шумовой помехи (ВИНШП)
6) Граница зоны действия ВБВС
7) Неподвижная система координат
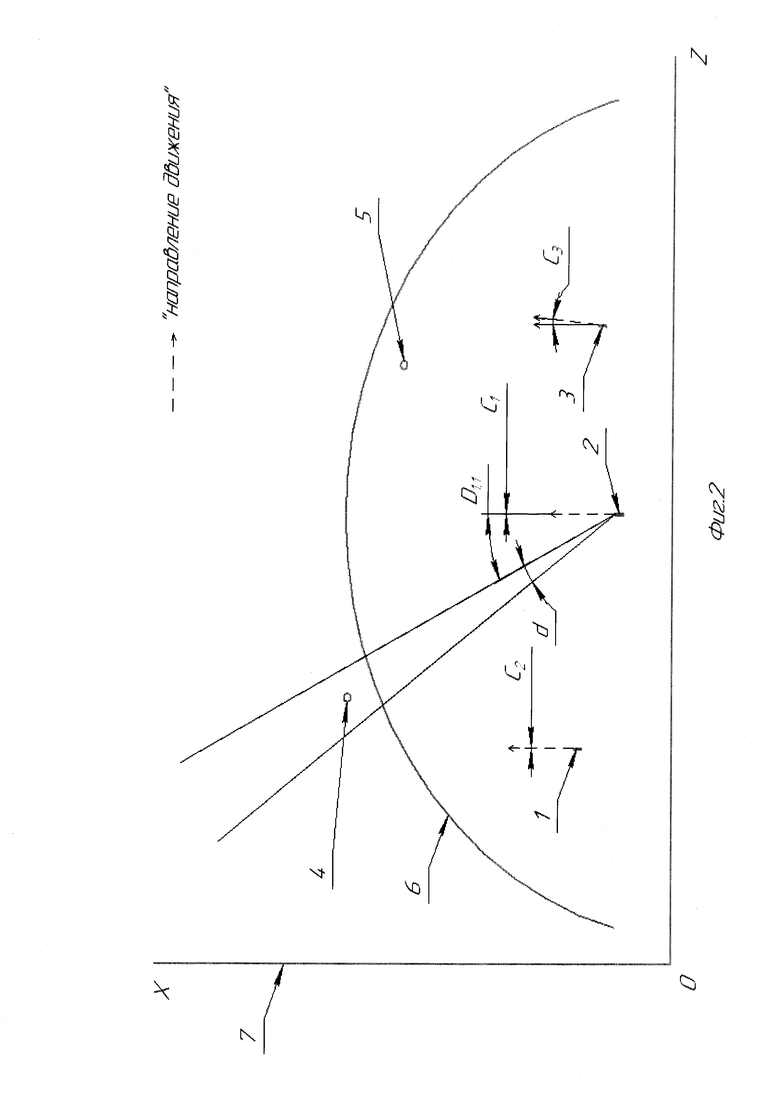
Два или более БВС стартуют из одной точки и движутся в одном направлении. При этом каждое БВС знает свои координаты, а взаимодействие между БВС происходит в единой неподвижной системе координат 7, которая формируется для всех БВС одновременно, в зависимости от точки старта. При этом направления движения БВС, равны оси «х» в неподвижной системе координат 7, однако могут иметь отклонения, как например ВВЕБВС 3 (угол C3). Подробнее способ описывается на рисунке Фиг. 2.
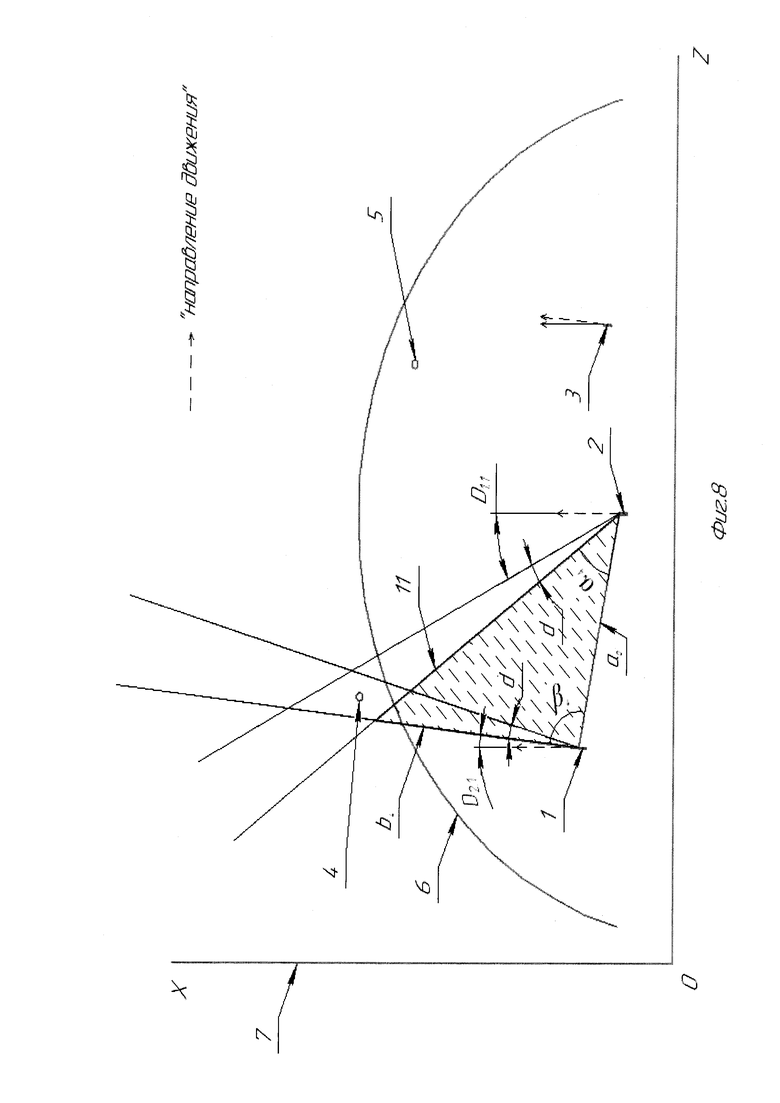
При наличии непрерывной шумовой помехи ВБВС 2, пеленгует ее, устанавливая собственное антенное устройство на энергетический центр источника непрерывной шумовой помехи, за счет поиска максимума в основном лепестке диаграммы направленности антенны. Для вычисления собственного пеленга ВБВС 2 учитывает: собственное положение в неподвижной системе координат, отклонение угла визирования антенны от оси «x» неподвижной системы координат 7 (D1.1), отклонение курса ВБВС 2 от оси «x» системы координат 7 (C1), собственную ширину диаграммы направленности (d), где собственный пеленг ВБВС 2 на источник непрерывной шумовой помехи N1 равен:

где С1=0; т.к. ВБВС 2 движется вдоль оси «x» неподвижной системы координат 7. При этом знак каждого угла определяется его отклонением, относительно направления движения БВС, влево знак «-», а вправо знак «+».
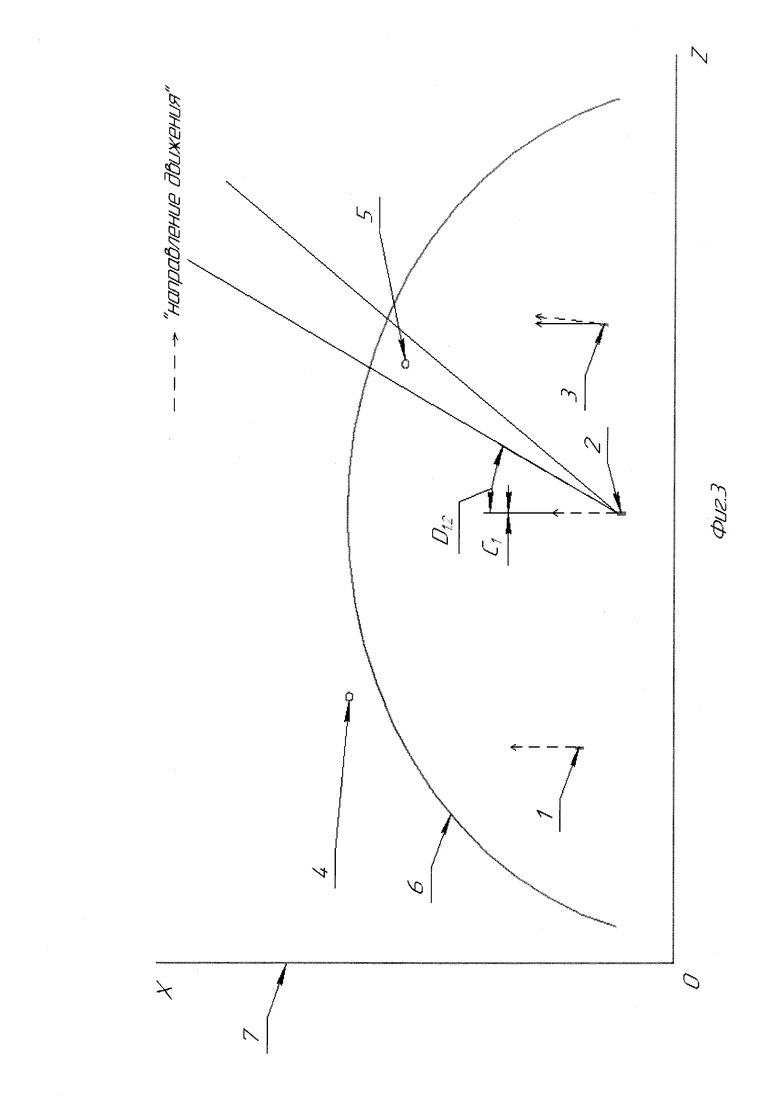
После вычисления пеленга на ПИНШП 4, ВБВС 2 продолжает поиск источников непрерывных шумовых помех, и при обнаружении ВИНШП 5 - вычисляет его пеленг, см. фиг. 3. После вычисления пеленгов всех источников непрерывных шумовых помех ВБВС 2 - производит их подсчет и нумерацию, где первым будет тот источник непрерывных шумовых помех, чей пеленг будет минимальным с учетом знака, относительно направления движения ВБВС 2.
После подсчета источников непрерывных шумовых помех, ВБВС 2, передает запрос на пеленг ПИНШП 4, на ПВЕБВС 1, при этом указывая его номер. ПВЕБВС 1 производит поиск и вычисление пеленгов источников непрерывных шумовых помех, их нумерацию и подсчет. Если число источников непрерывных шумовых помех ПВЕБВС 1 совпадает с числом ВБВС 2 производится вычисление координат ПИНШП 4. Если число источников непрерывных шумовых помех ПВЕБВС 1 не совпадает с числом ВБВС 2, формируется запрос от ВБВС 2, к ВВЕБВС 3, на поиск пеленгов источников непрерывных шумовых помех.
ВБВС 2 отправляет запрос на ПВЕБВС 1, в котором содержится номер источника непрерывных шумовых помех, для вычисления пеленга ПИНШП 4. При этом ПВЕБВС 1 в ответе на запрос передает: собственные координаты в неподвижной системе координат 7 и пеленг на ПИНШП 4 с учетом знака, вычисляемый по формуле (1).
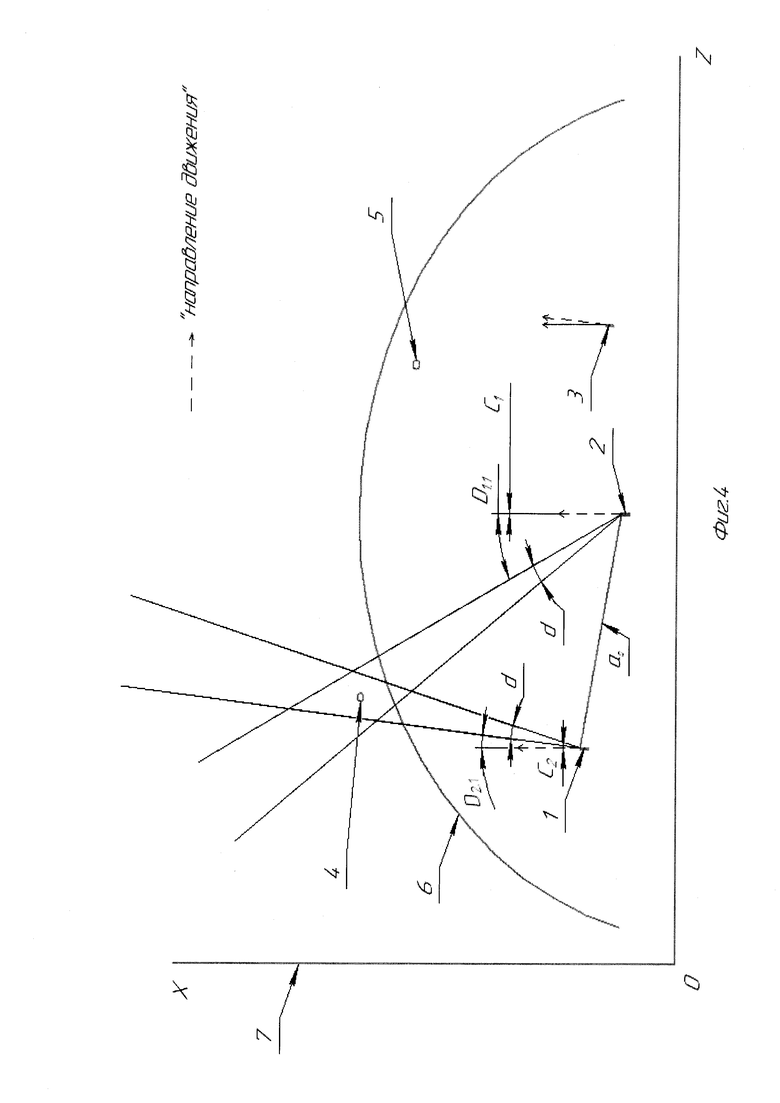
Получив данные от ПВЕБВС 1, ВБВС 2 вычисляет область вероятного положения источника помехи, которая представляет собой четырехугольник, образующийся в результате пересечения двух диаграмм направленности упомянутых БВС. Вычисление области вероятного положения источника помехи также поясняется рисунком фиг. 4, где a0 - база между ПВЕБВС 1 и ВБВС 2.
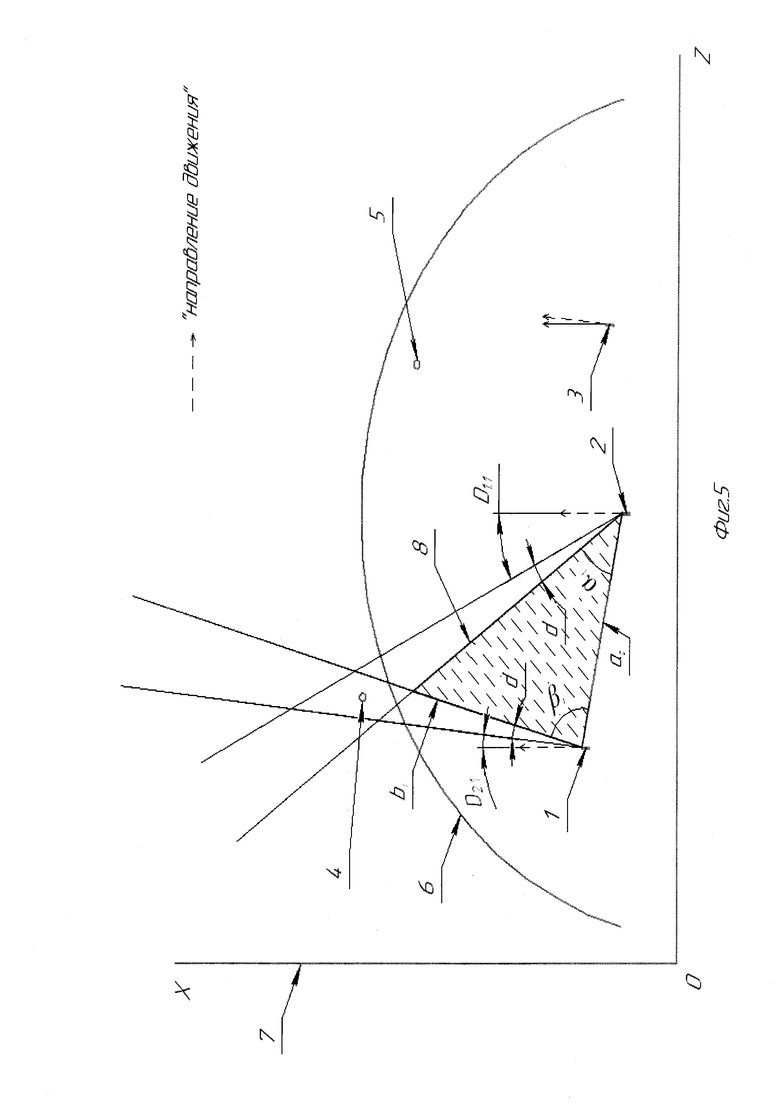
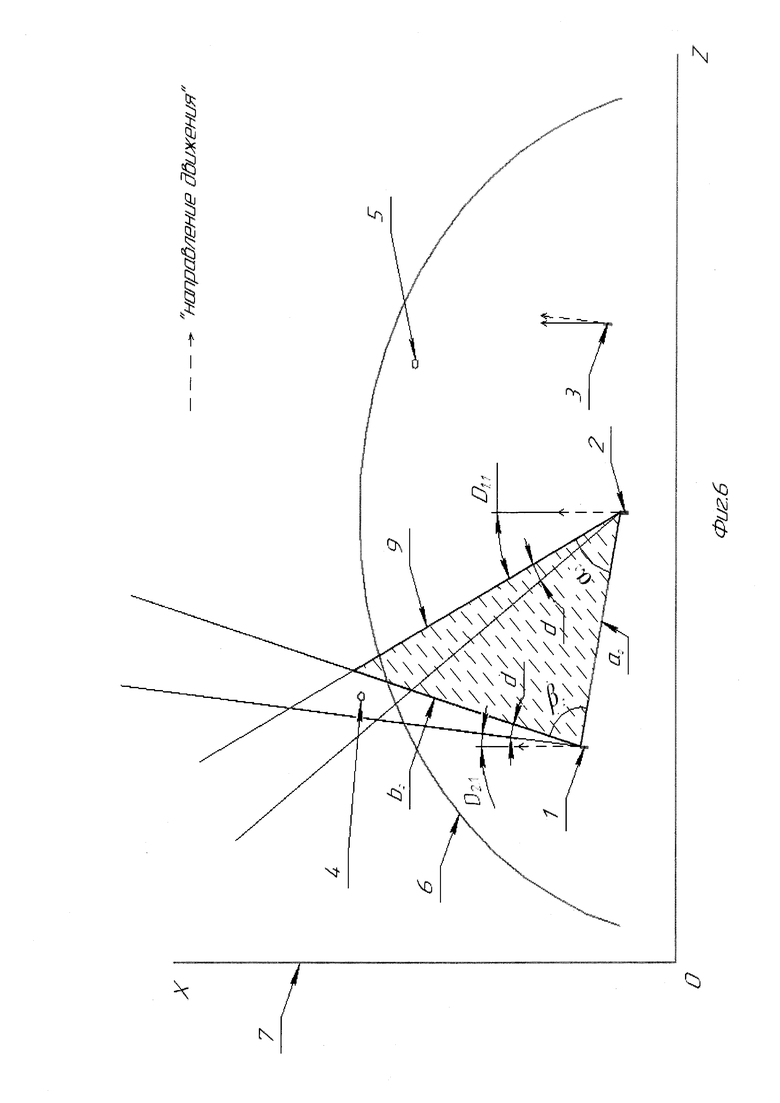
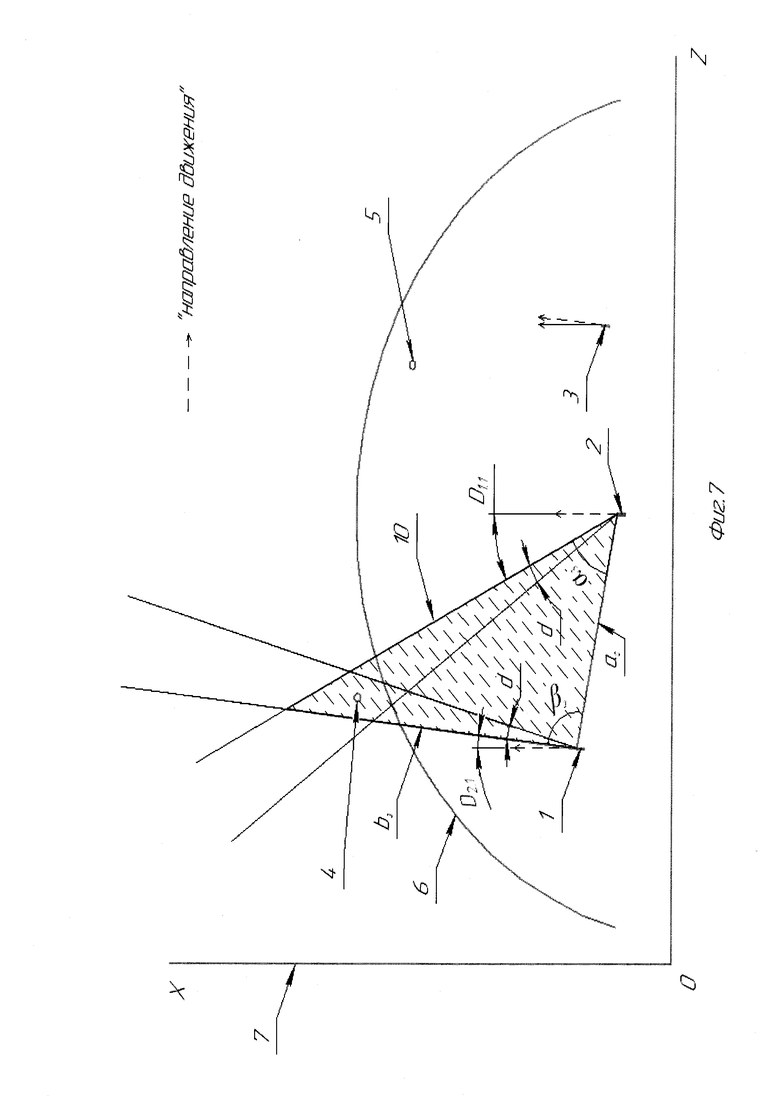
Для вычисления координат источника непрерывных шумовых помех, требуется вычислить координаты вершин четырехугольника. Для этого, ВБВС 2 вычисляет стороны четырех треугольников, образующихся в местах пересечения диаграмм направленности ВБВС 2 и ПВЕБВС 1, при этом, в качестве базы треугольников - принимается прямая между ПВЕБВС 1 и ВБВС 2. Вычисление координат вершин четырехугольника также поясняется рисунками фиг. 5, фиг. 6, фиг. 7, фиг. 8, где дополнительно изображены:
8) Первый треугольник
9) Второй треугольник
10) Третий треугольник
11) Четвертый треугольник
С помощью вычисления угла противолежащего катета, а также стороны от ВБВС 2, каждого из упомянутых треугольников - вычисляются координаты вершин в неподвижной системе координат 7. При этом сторона каждого из четырех треугольников вычисляется с помощью теоремы синусов, по формуле:

Где, a0 - база между ПВЕБВС 1 и ВБВС 2, bn - длина до каждой из вершин четырехугольника, при этом n принимает значения от 1 до 4 в соответствии с числом вершин.
Таким образом:

Длина bn каждого треугольника равна дальности до каждой из вершин четырехугольника. Вычислив координаты вершин четырехугольника ВБВС 2 формирует координаты области вероятного положения источника непрерывной шумовой помехи.
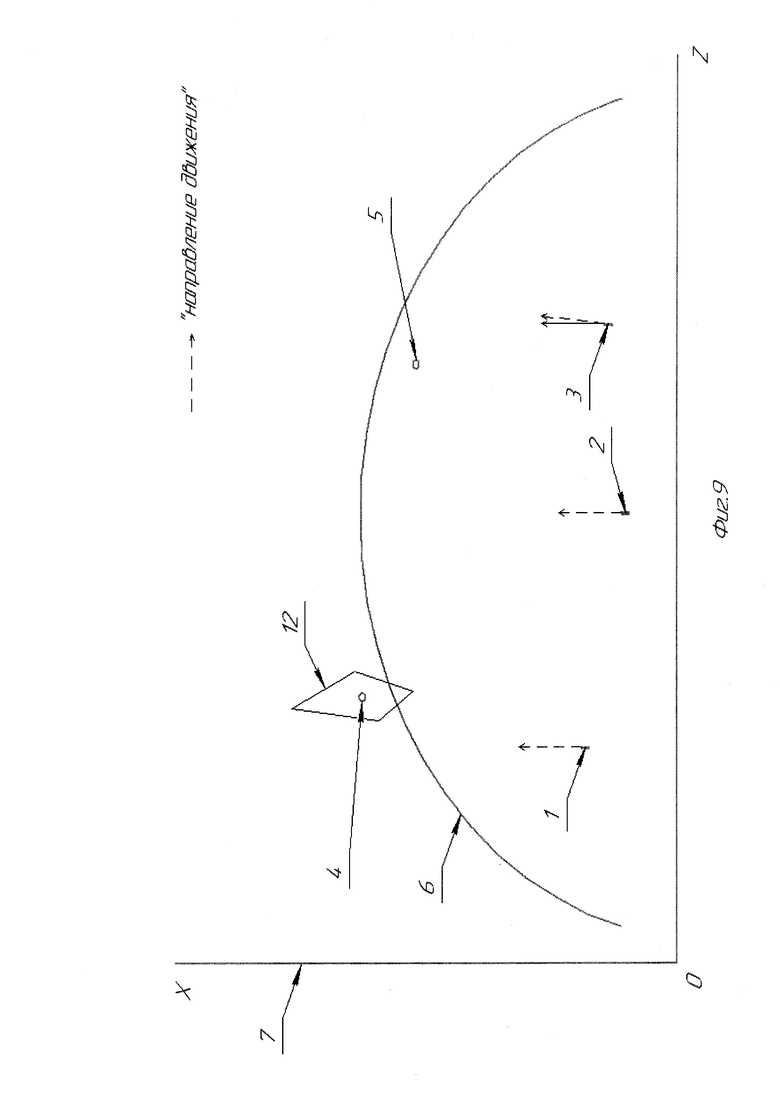
Сформированная область вероятного положения источника непрерывной шумовой помехи представляет собой четырехугольник, с известными координатами вершин. Сформированная таким способом область представлена на рисунке фиг. 9, где дополнительно изображена:
12) Область вероятного положения источника непрерывной шумовой помехи.
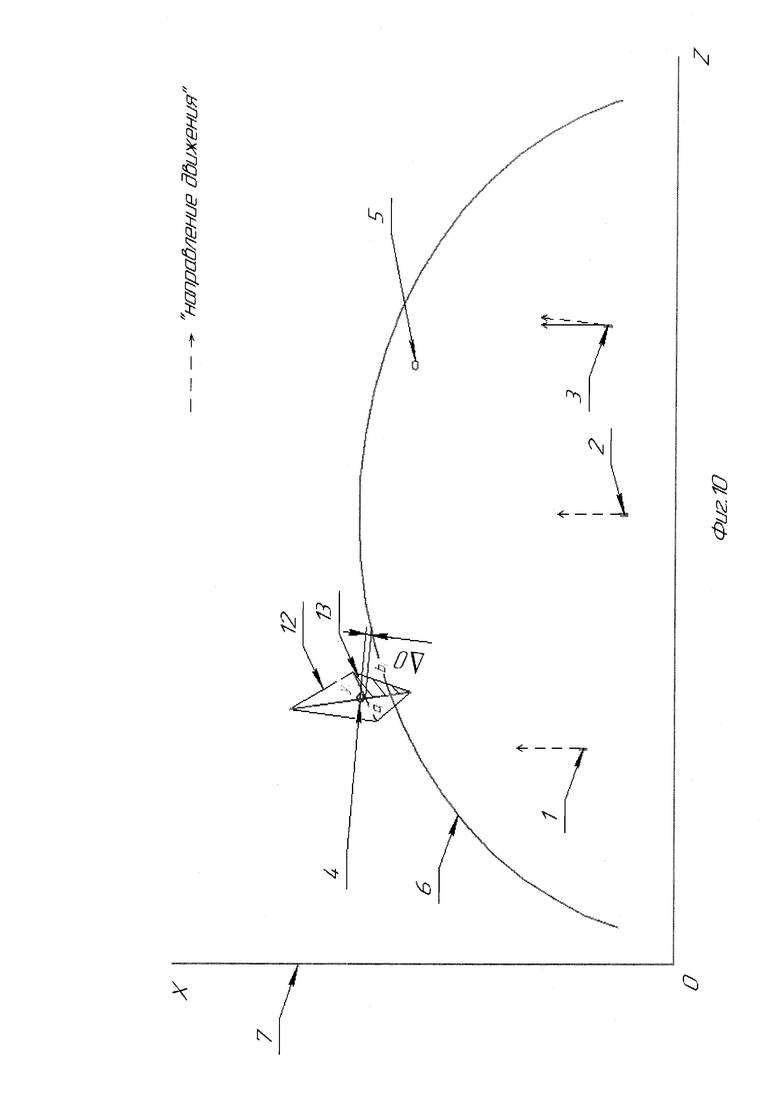
При этом видно, что получившийся четырехугольник находится в том числе за пределами границы зоны действия ВБВС 6, в связи с чем требуется уточнить координаты ПИНШП 4. Для этого ВБВС 2 соединяет между собой два тупых угла четырехугольника между собой, а затем два острых угла между собой. Пересечение двух отрезков, соединяющих между собой пары вершин - является координатами ПИНШП 4. Для нахождения координаты точки пересечения двух отрезков получившийся четырехугольник преобразуется в изображение, где 1 элемент (пиксель)=1 километру, с привязкой к ближайшей к ВБВС 2 вершине, после чего с помощью анализа изображения, а именно поиска пересечения двух кривых, а также числа пикселей до места пересечения от ближайшей к ВБВС 2 вершине, вычисляется точка пересечения двух линий, при этом их длина отсчитывается от ближайшей к ВБВС 2 вершине, и от самой правой, относительно других, вершины, таким образом становится известны 3 стороны получившегося треугольника, где с помощью теоремы косинусов находятся все углы, а затем вычисляется поправка координат к вершине, ближайшей к ВБВС 2. 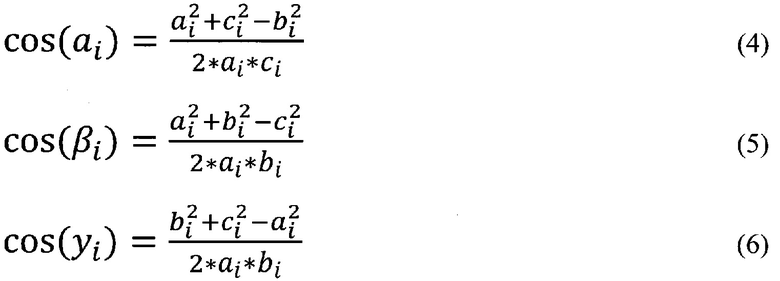
Где ai, βi и yi углы треугольника для вычисления поправки к координатам вершины, а переменные ai, bi и ci - стороны упомянутого треугольника.
Сформированный таким способом треугольник представлен на рисунке фиг. 10, где дополнительно изображен:
13) Треугольник для вычисления поправки к координатам вершины.
Таким образом координаты ПИНШП 4 являются точкой пересечения двух линий из четырех вершин в области вероятного положения источника непрерывной шумовой помехи 12. При этом будет иметь место ошибка между вычисленным и реальным положением ПИНШП 4, которая равна ΔO. Причем ΔO тем больше, чем больше взаимное неравенство острых и тупых углов четырехугольника образуемого областью вероятного положения источника непрерывной шумовой помехи 12.
Таким образом, становится возможно автоматическое обнаружение источника непрерывного излучения одноканальными радиолокационными станциями беспилотных воздушных судов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОКАНАЛЬНОЙ ПЕЛЕНГАЦИИ ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2352956C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| Способ радиопротиводействия беспилотному воздушному судну | 2024 |
|
RU2839399C1 |
| Способ автоматического определения местоположения транспортного средства по радиолокационным ориентирам | 2017 |
|
RU2658679C1 |
| Способ определения траектории маневрирующего воздушно-космического объекта | 2022 |
|
RU2818964C2 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ-ПОСТАНОВЩИКА ОТВЕТНОЙ ПОМЕХИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ, ОБЛУЧАЕМЫХ ПОСТАНОВЩИКОМ ОТВЕТНОЙ ПОМЕХИ | 2012 |
|
RU2531803C2 |
| ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА БЕСПИЛОТНОГО САМОЛЕТА-ИСТРЕБИТЕЛЯ | 2010 |
|
RU2418267C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2012 |
|
RU2521825C2 |
Изобретение относится к области радиолокации и может быть использовано для определения координат источника непрерывных шумовых помех. Технический результат – автоматическое обнаружение источника непрерывного излучения непрерывных шумовых помех одноканальными радиолокационными станциями беспилотных воздушных судов (БВС). В заявленном способе автоматического обнаружения источника непрерывного излучения одноканальными радиолокационными станциями (РЛС) БВС используют два БВС: ведущий и ведомый. Осуществляют получение собственного пеленга источника непрерывной шумовой помехи (ИНШП) ведущим БВС, а также получение пеленга того же ИНШП с ведомого БВС. С учетом отклонения направления движения от оси «x» в неподвижной системе координат и диаграммы направленности для ведущего и ведомого БВС вычисляют ведущим БВС области вероятного нахождения ИНШП, координаты вершин четырехугольника этой области. Соединяют вершины двух тупых углов и двух острых углов, проводят поиск точки пересечения получившихся линий, и вычисляют углы треугольника, образуемого ближайшей к ведущему БВС и правой относительно остальных вершине. Определяют поправки к координатам вершины области вероятного положения ИНШП и вычисляют координаты ИНШП. 10 ил.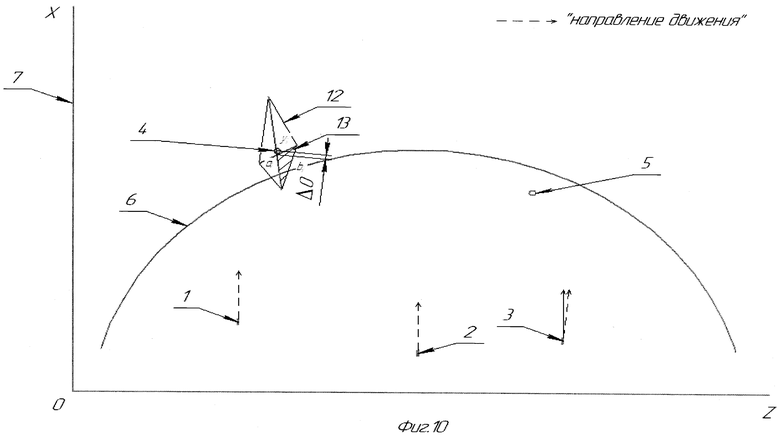
Способ автоматического обнаружения источника непрерывного излучения одноканальными радиолокационными станциями беспилотных воздушных судов, заключающийся в том, что используют двухпозиционную систему, измеряют угловые координаты источника непрерывных шумовых помех (ИНШП) относительно радиолокационных станций (РЛС) беспилотных воздушных судов (БВС), отличающийся тем, что используются два БВС: ведущий и ведомый, ведущий БВС получает собственный пеленг ИНШП, формирует запрос на поиск пеленга того же ИНШП ведомым БВС, ведущий БВС получает координаты ведомого БВС в неподвижной системе координат, а также пеленг на заданный ИНШП, с учетом знака относительно оси «x» в неподвижной системе координат, ширину диаграммы направленности, ведущий БВС вычисляет четырехугольник области вероятного положения ИНШП, ведущий БВС вычисляет координаты вершин четырехугольника области вероятного положения ИНШП, с помощью вычисления сторон четырех получившихся треугольников, где в качестве базы используется прямая между ведущим БВС и ведомым БВС, ведущий БВС соединяет между собой острые углы и тупые углы, тем самым образуя пересечение в четырехугольнике области вероятного нахождения ИНШП, получившаяся фигура преобразуется в изображение, где 1 элемент (пиксель) равен 1 километру, вычисляются длины сторон треугольника, образуемого ближайшей к ведущему БВС вершине и самой правой относительно других вершин, после чего вычисляется поправка к координатам ближайшей к ведущему БВС вершины области вероятного положения ИНШП, затем выполняется вычисление координат ИНШП.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ-ПОСТАНОВЩИКА ОТВЕТНОЙ ПОМЕХИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ, ОБЛУЧАЕМЫХ ПОСТАНОВЩИКОМ ОТВЕТНОЙ ПОМЕХИ | 2012 |
|
RU2531803C2 |
| Способ определения пеленга на источник непрерывной помехи и радиолокационное устройство для его осуществления | 2016 |
|
RU2608360C1 |
| СПОСОБ ОЦЕНИВАНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ В УГЛОМЕРНОЙ ДВУХПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2263927C2 |
| УГЛОМЕРНО-КОРРЕЛЯЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2458358C1 |
| Способ определения разности расстояний до постановщика многократной ответно-импульсной помехи в активно-пассивной многопозиционной радиолокационной системе | 2020 |
|
RU2745108C1 |
| US 2015204967 A1, 23.07.2015 | |||
| CN 116540187 A, 04.08.2023 | |||
| US 6653969 B1, 25.11.2003. | |||

