Изобретение относится к области систем автоматического управления, предназначенных преимущественно для автоматического сопровождения перемещающихся в пространстве объектов с подвижного носителя, и может быть использовано в системах наведения и стабилизации вооружения, антенн радиолокационных станций и чувствительных элементов оптико-электронных станций объектов военной техники, в системах автоматического сопровождения телескопов.
Известна двухканальная система автоматического сопровождения телескопа (Авторское свидетельство на изобретение СССР №684504 МПК G05B11/01. Заявлено 14.02.1977. Опубликовано 05.09.1979). Недостатками данной системы являются конструктивная сложность и высокая стоимость, обусловленные наличием двух каналов наведения (грубого и точного), а также невысокая точность автоматического сопровождения при установке телескопа на подвижное основание.
Известна система автоматического сопровождения цели бортовой радиолокационной станции (Коновалов Г.Ф. Радиоавтоматика: Учеб. для вузов по спец. «Радиотехника». - М.: Высш. шк., 1990. - 335 с., рис. 1.12). Недостатком данной системы является невысокая точность автосопровождения цели при колебаниях носителя, на котором установлена радиолокационная станция.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является система автосопровождения (Динамика следящих приводов: Учеб. пособие для втузов / Б.И. Петров, В.А. Полковников, Л.В. Рабинович и др.; Под ред. Л.В. Рабиновича. - 2-е изд., перераб. и доп. - М. Машиностроение, 1982. - 496 с., рис. 2.26), принятая за прототип.
Это устройство содержит последовательно соединенные устройство, вырабатывающее сигнал отклонения объекта управления от направления на цель (пеленгационное устройство), предварительный усилитель, усилитель мощности, исполнительный двигатель, выход которого механически связан с объектом управления (нагрузкой) и корректирующее устройство, вход которого соединен с выходом усилителя мощности, а выход - со вторым входом предварительного усилителя. Устройство, вырабатывающее сигнал отклонения объекта управления от направления на цель (УВСО), механически связано с объектом управления.
Данная система автосопровождения работает следующим образом. При наличии отклонения объекта управления от направления на цель УВСО (пеленгационное устройство) вырабатывает сигнал, который поступает на вход предварительного усилителя и суммируется с сигналом отрицательной обратной связи, поступающим с выхода корректирующего устройства. Далее усиленный предварительным усилителем сигнал отклонения усиливается по мощности до уровня, необходимого для управления исполнительным двигателем, перемещающим объект управления в сторону уменьшения отклонения от направления на цель.
Недостатком этого устройства является невысокая точность автосопровождения цели при колебаниях подвижного носителя, на котором установлен объект управления.
Задачей предлагаемого изобретения является повышение точности автоматического сопровождения перемещающейся в пространстве цели с подвижного носителя.
Сущность технического решения заключается в следующем. Сопровождение перемещающихся в пространстве целей по направлению для осуществления слежения за ними или их уничтожения осуществляется системами автоматического управления по сигналам отклонения от направления на цель, вырабатываемым оптико-электронными, радиолокационными или иными устройствами. Отклонение объекта управления от направления на цель при работе систем автосопровождения обуславливается как собственными перемещениями цели в пространстве, так и движениями носителя, на котором установлена система автосопровождения. Причем отклонения от направления на цель, обусловленные движениями носителя при движении по пересеченной местности, имеют более высокочастотный характер, по сравнению с отклонениями, обусловленными собственными перемещениями цели, в связи с чем системе автоматического сопровождения сложнее отрабатывать их с высокой точностью.
Повышение точности автоматического сопровождения перемещающейся в пространстве цели с подвижного носителя может быть достигнуто за счет введения внутрь контура автоматического сопровождения контура стабилизации объекта управления по сигналу от датчика его абсолютной угловой скорости, а также введения компенсирующего канала по сигналу от датчика абсолютной угловой скорости носителя относительно оси наведения объекта управления.
Указанный технический результат при осуществлении изобретения достигается тем, что
Вариант 1 в систему автоматического сопровождения цели, содержащую УВСО, механически связанное с объектом управления, последовательно соединенные предварительный усилитель, усилитель мощности, исполнительный двигатель, выход которого механически связан с объектом управления, введены датчик абсолютной угловой скорости, вход которого механически связан с объектом управления, первый сумматор, первый вход которого соединен с выходом УВСО, а второй вход соединен с выходом датчика абсолютной угловой скорости, интегратор, вход которого соединен с выходом первого сумматора, второй сумматор, первый вход которого соединен с выходом интегратора, второй вход соединен с выходом датчика абсолютной угловой скорости, а выход соединен с входом предварительного усилителя.
Вариант 2 в систему автоматического сопровождения цели, содержащую УВСО, механически связанное с объектом управления, последовательно соединенные предварительный усилитель, усилитель мощности, исполнительный двигатель, выход которого механически связан с объектом управления, введены первый датчик абсолютной угловой скорости, вход которого механически связан с объектом управления, первый сумматор, первый вход которого соединен с выходом УВСО, а второй вход соединен с выходом первого датчика абсолютной угловой скорости, интегратор, вход которого соединен с выходом первого сумматора, второй датчик абсолютной угловой скорости, измеряющий угловую скорость носителя относительно оси наведения объекта управления, второй сумматор, первый вход которого соединен с выходом интегратора, а второй вход соединен с выходом второго датчика абсолютной угловой скорости, третий сумматор, первый вход которого соединен с выходом второго сумматора, второй вход соединен с выходом первого датчика абсолютной угловой скорости, а выход соединен с входом предварительного усилителя.
Вариант 3 в систему автоматического сопровождения цели, содержащую УВСО, механически связанное с объектом управления, последовательно соединенные предварительный усилитель, усилитель мощности, исполнительный двигатель, выход которого механически связан с объектом управления, введены первый датчик абсолютной угловой скорости, вход которого механически связан с объектом управления, первый сумматор, первый вход которого соединен с выходом УВСО, а второй вход соединен с выходом первого датчика абсолютной угловой скорости, интегратор, вход которого соединен с выходом первого сумматора, второй датчик абсолютной угловой скорости, измеряющий угловую скорость носителя относительно оси наведения объекта управления, второй сумматор, первый вход которого соединен с выходом интегратора, а второй вход соединен с выходом второго датчика абсолютной угловой скорости, третий сумматор, первый вход которого соединен с выходом второго сумматора, второй вход соединен с выходом первого датчика абсолютной угловой скорости, датчик скорости, вход которого механически связан с выходом исполнительного двигателя, четвертый сумматор, первый вход которого соединен с выходом третьего сумматора, второй вход соединен с выходом датчика скорости, а выход соединен с входом предварительного усилителя.
В заявленном устройстве по первому варианту повышение точности автоматического сопровождения перемещающейся в пространстве цели с подвижного носителя достигнуто за счет введения внутрь контура автоматического сопровождения контура стабилизации объекта управления по сигналу от датчика его абсолютной угловой скорости.
В заявленном устройстве по второму варианту повышение точности автоматического сопровождения перемещающейся в пространстве цели с подвижного носителя достигнуто за счет введения внутрь контура автоматического сопровождения контура стабилизации объекта управления по сигналу от датчика его абсолютной угловой скорости и введения компенсирующего канала по сигналу от датчика абсолютной угловой скорости носителя относительно оси наведения объекта управления.
В заявленном устройстве по третьему варианту повышение точности автоматического сопровождения перемещающейся в пространстве цели с подвижного носителя достигнуто за счет введения внутрь контура автоматического сопровождения контура стабилизации объекта управления по сигналу от датчика его абсолютной угловой скорости, введения компенсирующего канала по сигналу от датчика абсолютной угловой скорости носителя относительно оси наведения объекта управления и введения обратной связи по скорости исполнительного двигателя, позволяющей повысить жесткость механической характеристики силовой части системы автосопровождения и тем самым уменьшить влияние на точность автосопровождения моментных возмущений на оси наведения объекта управления.
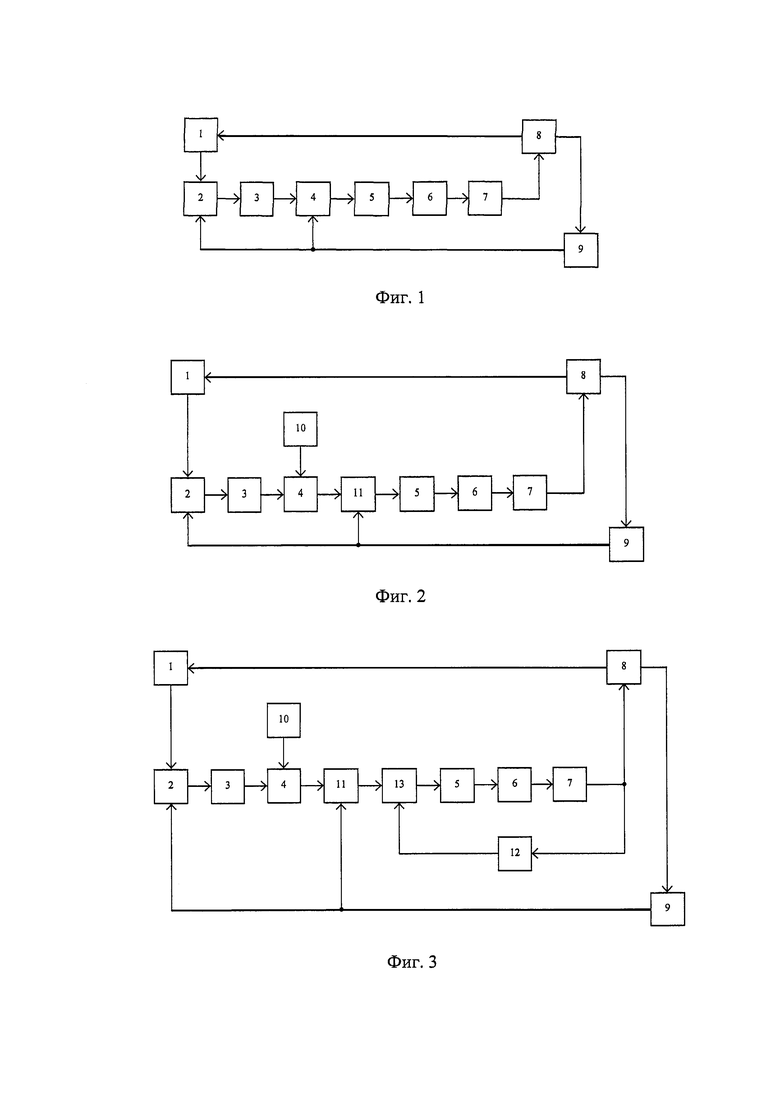
На фиг. 1, 2 и 3 приведены схемы заявленного устройства соответственно по первому, второму и третьему вариантам.
На фиг. 1 приняты следующие обозначения:
1 - УВСО;
2 - первый сумматор;
3 - интегратор;
4 - второй сумматор;
5 - предварительный усилитель;
6 - усилитель мощности;
7 - исполнительный двигатель;
8 - объект управления;
9 - датчик абсолютной угловой скорости.
На фиг. 2, 3 приняты следующие обозначения:
1 - УВСО;
2 - первый сумматор;
3 - интегратор;
4 - второй сумматор;
5 - предварительный усилитель;
6 - усилитель мощности;
7 - исполнительный двигатель;
8 - объект управления;
9 - первый датчик абсолютной угловой скорости;
10 - второй датчик абсолютной угловой скорости;
11 - третий сумматор;
12 - датчик скорости;
13 - четвертый сумматор.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше технического результата, заключаются в следующем.
Система автоматического сопровождения цели по первому варианту (фиг. 1) содержит последовательно соединенные УВСО 1, первый сумматор 2, интегратор 3, второй сумматор 4, предварительный усилитель 5, усилитель мощности 6, исполнительный двигатель 7, выход которого механически связан с объектом управления 8, а также датчик абсолютной угловой скорости 9, вход которого механически связан с объектом управления 8. Выход датчика абсолютной угловой скорости 9 соединен со вторыми входами первого и второго сумматоров 2 и 4. УВСО 1 механически связано с объектом управления 8.
Система автоматического сопровождения цели по второму варианту (фиг. 2) содержит последовательно соединенные УВСО 1, первый сумматор 2, интегратор 3, второй сумматор 4, последовательно соединенные предварительный усилитель 5, усилитель мощности 6, исполнительный двигатель 7, выход которого механически связан с объектом управления 8, первый датчик абсолютной угловой скорости 9, вход которого механически связан с объектом управления 8, второй датчик абсолютной угловой скорости 10, измеряющий угловую скорость носителя относительно оси наведения объекта управления 8, и третий сумматор 11, первый вход которого соединен с выходом второго сумматора 4, второй вход соединен с выходом первого датчика абсолютной угловой скорости 9, а выход соединен с входом предварительного усилителя 5. Второй вход первого сумматора 2 соединен с выходом первого датчика абсолютной угловой скорости 9. Второй вход второго сумматора 4 соединен с выходом второго датчика абсолютной угловой скорости 10. УВСО 1 механически связано с объектом управления 8.
Система автоматического сопровождения цели по третьему варианту (фиг. 3) содержит последовательно соединенные УВСО 1, первый сумматор 2, интегратор 3, второй сумматор 4, последовательно соединенные предварительный усилитель 5, усилитель мощности 6, исполнительный двигатель 7, выход которого механически связан с объектом управления 8, первый датчик абсолютной угловой скорости 9, вход которого механически связан с объектом управления 8, второй датчик абсолютной угловой скорости 10, измеряющий угловую скорость носителя относительно оси наведения объекта управления, третий сумматор 11, первый вход которого соединен с выходом второго сумматора 4, второй вход соединен с выходом первого датчика абсолютной угловой скорости 9, датчик скорости 12, вход которого механически связан с выходом исполнительного двигателя 7, и четвертый сумматор 13, первый вход которого соединен с выходом третьего сумматора 11, второй вход соединен с выходом датчика скорости 12, а выход соединен с входом предварительного усилителя 5. Второй вход первого сумматора 2 соединен с выходом первого датчика абсолютной угловой скорости 9. Второй вход второго сумматора 4 соединен с выходом второго датчика абсолютной угловой скорости 10. УВСО 1 механически связано с объектом управления 8.
Система автоматического сопровождения цели по первому варианту работает следующим образом.
Сигнал отклонения объекта управления 8 от направления на цель от вырабатывающего его УВСО 1 поступает на первый вход первого сумматора 2, через второй вход которого по сигналу от датчика абсолютной угловой скорости 9 замыкается контур стабилизации объекта управления 8. С выхода первого сумматора 2 сигнал поступает на вход интегратора 3, на выходе которого формируется сигнал ошибки стабилизации объекта управления 8. С выхода интегратора 3 сигнал ошибки стабилизации поступает на первый вход второго сумматора 4, на второй вход которого поступает сигнал отрицательной обратной связи от датчика абсолютной угловой скорости 9, обеспечивающий повышение запасов устойчивости контура стабилизации объекта управления 8. Выходной сигнал второго сумматора 4 поступает на вход предварительного усилителя 5, обеспечивающего его усиление по напряжению. Выходной сигнал предварительного усилителя 5 поступает на вход усилителя мощности 6, обеспечивающего его усиление по мощности до уровня, необходимого для управления исполнительным двигателем 7. Исполнительный двигатель 7 посредством механической связи разворачивает объект управления 8 в сторону уменьшения его отклонения от направления на цель.
Наличие внутреннего контура стабилизации объекта управления 8, замкнутого через первый сумматор 2 по сигналу от датчика абсолютной угловой скорости 9, позволяет более эффективно парировать отклонения объекта управления 8 от направления на цель, обусловленные движением носителя, и соответственно повысить точность автоматического сопровождения цели с подвижного носителя.
Система автоматического сопровождения цели по второму варианту работает следующим образом.
Сигнал отклонения объекта управления 8 от направления на цель от вырабатывающего его УВСО 1 поступает на первый вход первого сумматора 2, через второй вход которого по сигналу от первого датчика абсолютной угловой скорости 9 замыкается контур стабилизации объекта управления 8. С выхода первого сумматора 2 сигнал поступает на вход интегратора 3, на выходе которого формируется сигнал ошибки стабилизации объекта управления 8. С выхода интегратора 3 сигнал ошибки стабилизации поступает на первый вход второго сумматора 4, на второй вход которого поступает сигнал от второго датчика абсолютной угловой скорости 10, измеряющего угловую скорость носителя относительно оси наведения объекта управления 8. Выходной сигнал второго сумматора 4 поступает на первый вход третьего сумматора 11, на второй вход которого поступает сигнал отрицательной обратной связи от первого датчика абсолютной угловой скорости 9, обеспечивающий повышение запасов устойчивости контура стабилизации объекта управления 8. Выходной сигнал третьего сумматора 11 поступает на вход предварительного усилителя 5, обеспечивающего его усиление по напряжению. Выходной сигнал предварительного усилителя 5 поступает на вход усилителя мощности 6, обеспечивающего его усиление по мощности до уровня, необходимого для управления исполнительным двигателем 7. Исполнительный двигатель 7 посредством механической связи разворачивает объект управления 8 в сторону уменьшения его отклонения от направления на цель.
В отличие от системы автоматического сопровождения цели по первому варианту, реализованной по принципу регулирования по отклонению, система автоматического сопровождения цели по второму варианту реализована по принципу комбинированного регулирования. Наличие в ней компенсирующего канала по угловой скорости носителя, измеряемой вторым датчиком абсолютной угловой скорости 10, наряду с наличием внутреннего контура стабилизации объекта управления 8, замкнутого через первый сумматор 2 по сигналу от датчика абсолютной угловой скорости 9, позволяет эффективно парировать отклонения объекта управления 8 от направления на цель, обусловленные движением носителя, и соответственно повысить точность автоматического сопровождения цели с подвижного носителя.
Система автоматического сопровождения цели по третьему варианту работает следующим образом.
Сигнал отклонения объекта управления 8 от направления на цель от вырабатывающего его УВСО 1 поступает на первый вход первого сумматора 2, через второй вход которого по сигналу от первого датчика абсолютной угловой скорости 9 замыкается контур стабилизации объекта управления 8. С выхода первого сумматора 2 сигнал поступает на вход интегратора 3, на выходе которого формируется сигнал ошибки стабилизации объекта управления 8, сформированный с учетом имеющегося отклонения объекта управления 8 от направления на цель. С выхода интегратора 3 сигнал ошибки стабилизации поступает на первый вход второго сумматора 4, на второй вход которого поступает сигнал от второго датчика абсолютной угловой скорости 10, измеряющего угловую скорость носителя относительно оси наведения объекта управления 8. Выходной сигнал второго сумматора 4 поступает на первый вход третьего сумматора 11, на второй вход которого поступает сигнал отрицательной обратной связи от первого датчика абсолютной угловой скорости 9, обеспечивающий повышение запасов устойчивости контура стабилизации объекта управления 8. Выходной сигнал третьего сумматора 11 поступает на первый вход четвертого сумматора 13, на второй вход которого поступает сигнал от датчика скорости 12, измеряющего скорость исполнительного двигателя 7. Выходной сигнал четвертого сумматора 13 поступает на вход предварительного усилителя 5, обеспечивающего его усиление по напряжению. Выходной сигнал предварительного усилителя 5 поступает на вход усилителя мощности 6, обеспечивающего его усиление по мощности до уровня, необходимого для управления исполнительным двигателем 7. Исполнительный двигатель 7 посредством механической связи разворачивает объект управления 8 в сторону уменьшения его отклонения от направления на цель.
Система автоматического сопровождения цели по третьему варианту, также как и система автоматического сопровождения по второму варианту, реализована по принципу комбинированного регулирования. Наличие в ней компенсирующего канала по угловой скорости носителя, измеряемой вторым датчиком абсолютной угловой скорости 10, наряду с наличием внутреннего контура стабилизации объекта управления 8, замкнутого через первый сумматор 2 по сигналу от датчика абсолютной угловой скорости 9, а также наличие обратной связи по скорости исполнительного двигателя 7, реализуемой посредством датчика скорости 12 и позволяющей повысить жесткость механической характеристики силовой части системы управления, позволяют эффективно парировать отклонения объекта управления 8 от направления на цель, обусловленные движением носителя, и соответственно повысить точность автоматического сопровождения цели с подвижного носителя.
В предлагаемом изобретении при практической реализации могут быть использованы известные схемные реализации сумматора, интегратора, в том числе устройства, реализованные на базе программируемых ЭВМ и контроллеров.
В качестве УВСО могут быть использованы пеленгационные устройства радиолокационных и оптико-электронных станций, измерители рассогласования, а также совокупность задатчика, датчика угла, механически связанного с объектом управления, и сумматора, вычисляющего разность выходных сигналов задатчика и датчика угла.
В качестве предварительного усилителя могут быть использованы электронные усилители, выполненные на базе микросхем и полупроводниковых элементов.
В качестве усилителя мощности могут быть использованы электромашинные, полупроводниковые усилители, генераторы, регулируемые насосы.
В качестве исполнительного двигателя могут быть использованы электродвигатели постоянного и переменного тока, гидромоторы, поворотные гидравлические секторы, гидроцилиндры, комбинированные подъемно-уравновешивающие механизмы.
В качестве датчика абсолютной угловой скорости могут быть использованы любые известные гироскопические датчики угловой скорости.
В качестве датчика скорости могут быть использованы тахогенераторы постоянного и переменного тока, импульсные датчики скорости, энкодеры совместно со схемой обработки их сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического сопровождения цели | 2023 |
|
RU2803285C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| Система наведения и стабилизации | 2020 |
|
RU2735789C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ | 2001 |
|
RU2212687C2 |
Изобретение относится к области систем автоматического управления, предназначенных преимущественно для автоматического сопровождения перемещающихся в пространстве объектов с подвижного носителя. Сущность предложенного технического решения заключается в следующем: в систему автоматического сопровождения цели, содержащую устройство, вырабатывающее сигнал отклонения объекта управления от направления на цель, механически связанное с объектом управления, последовательно соединенные предварительный усилитель, усилитель мощности, исполнительный двигатель, выход которого механически связан с объектом управления, дополнительно введены первый и второй датчики абсолютной угловой скорости, первый, второй, третий и четвертый сумматоры, интегратор, датчик для измерения скорости исполнительного двигателя. Техническим результатом предложенной системы является повышение точности автоматического сопровождения перемещающейся в пространстве цели с подвижного носителя. 3 н.п. ф-лы, 3 ил.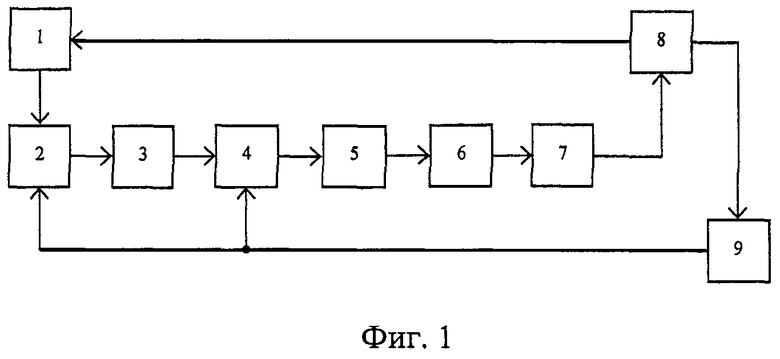
1. Система автоматического сопровождения цели, содержащая устройство, вырабатывающее сигнал отклонения объекта управления от направления на цель, механически связанное с объектом управления, последовательно соединенные предварительный усилитель, усилитель мощности, исполнительный двигатель, выход которого механически связан с объектом управления, отличающаяся тем, что в нее введены датчик абсолютной угловой скорости, вход которого механически связан с объектом управления, первый сумматор, первый вход которого соединен с выходом устройства, вырабатывающего сигнал отклонения объекта управления от направления на цель, а второй вход соединен с выходом датчика абсолютной угловой скорости, интегратор, вход которого соединен с выходом первого сумматора, второй сумматор, первый вход которого соединен с выходом интегратора, второй вход соединен с выходом датчика абсолютной угловой скорости, а выход соединен с входом предварительного усилителя.
2. Система автоматического сопровождения цели, содержащая устройство, вырабатывающее сигнал отклонения объекта управления от направления на цель, механически связанное с объектом управления, последовательно соединенные предварительный усилитель, усилитель мощности, исполнительный двигатель, выход которого механически связан с объектом управления, отличающаяся тем, что в нее введены первый датчик абсолютной угловой скорости, вход которого механически связан с объектом управления, первый сумматор, первый вход которого соединен с выходом устройства, вырабатывающего сигнал отклонения объекта управления от направления на цель, а второй вход соединен с выходом первого датчика абсолютной угловой скорости, интегратор, вход которого соединен с выходом первого сумматора, второй датчик абсолютной угловой скорости, второй сумматор, первый вход которого соединен с выходом интегратора, а второй вход соединен с выходом второго датчика абсолютной угловой скорости, третий сумматор, первый вход которого соединен с выходом второго сумматора, второй вход соединен с выходом первого датчика абсолютной угловой скорости, а выход соединен с входом предварительного усилителя.
3. Система автоматического сопровождения цели, содержащая устройство, вырабатывающее сигнал отклонения объекта управления от направления на цель, механически связанное с объектом управления, последовательно соединенные предварительный усилитель, усилитель мощности, исполнительный двигатель, выход которого механически связан с объектом управления, отличающаяся тем, что в неё введены первый датчик абсолютной угловой скорости, вход которого механически связан с объектом управления, первый сумматор, первый вход которого соединен с выходом устройства, вырабатывающего сигнал отклонения объекта управления от направления на цель, а второй вход соединен с выходом первого датчика абсолютной угловой скорости, интегратор, вход которого соединен с выходом первого сумматора, второй датчик абсолютной угловой скорости, второй сумматор, первый вход которого соединен с выходом интегратора, а второй вход соединен с выходом второго датчика абсолютной угловой скорости, третий сумматор, первый вход которого соединен с выходом второго сумматора, второй вход соединен с выходом первого датчика абсолютной угловой скорости, датчик скорости, вход которого механически связан с выходом исполнительного двигателя, четвертый сумматор, первый вход которого соединен с выходом третьего сумматора, второй вход соединен с выходом датчика скорости, а выход соединен с входом предварительного усилителя.
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| US 4274609 A1, 23.06.1981 | |||
| US 7825848 B2, 02.11.2010 | |||
| US 8106814 B2, 31.01.2012. | |||

