Изобретение относится к области систем автоматического управления, предназначенных преимущественно для автоматического сопровождения перемещающихся в пространстве объектов с неподвижного носителя, и может быть использовано в системах наведения вооружения, антенн радиолокационных станций и чувствительных элементов оптико-электронных станций объектов военной техники, в системах автоматического сопровождения телескопов.
Известна двухканальная система автоматического сопровождения телескопа (Авторское свидетельство на изобретение СССР №684504 МПК G05B 11/01. Заявлено 14.02.1977. Опубликовано 05.09.1979). Недостатками данной системы являются конструктивная сложность и высокая стоимость, обусловленные наличием двух каналов наведения (грубого и точного).
Известна система автоматического сопровождения цели бортовой радиолокационной станции (Коновалов Г.Ф. Радиоавтоматика: Учеб. для вузов по спец. «Радиотехника». - М.: Высш. Шк., 1990. - 335 с, рис. 1.12). Недостатком данной системы является отсутствие возможности работы в полуавтоматическом режиме наведения для поиска цели оператором с последующим переходом в режим автоматического сопровождения цели.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является система автосопровождения (Динамика следящих приводов: Учеб. пособие для втузов/ Б.И. Петров, В.А. Полковников, Л.В. Рабинович и др.; Под ред. Л.В. Рабиновича. - 2-е изд., перераб. и доп. - М. Машиностроение, 1982. - 496 с, рис. 2.26), принятая за прототип.
Это устройство содержит последовательно соединенные устройство, вырабатывающее сигнал отклонения объекта управления от направления на цель (пеленгационное устройство), предварительный усилитель, усилитель мощности, исполнительный двигатель, выход которого механически связан с объектом управления (нагрузкой) и корректирующее устройство, вход которого соединен с выходом усилителя мощности, а выход - со вторым входом предварительного усилителя. Устройство, вырабатывающее сигнал отклонения объекта управления от направления на цель (УВСО), механически связано с объектом управления.
Данная система автосопровождения работает следующим образом. При наличии отклонения объекта управления от направления на цель пеленгационное устройство вырабатывает сигнал, который поступает на вход предварительного усилителя и суммируется с сигналом отрицательной обратной связи, поступающим с выхода корректирующего устройства. Далее усиленный предварительным усилителем сигнал отклонения усиливается по мощности до уровня, необходимого для управления исполнительным двигателем, перемещающим объект управления в сторону уменьшения отклонения от направления на цель.
Недостатком данного устройства является отсутствие возможности работы в полуавтоматическом режиме наведения для поиска цели оператором с последующим переходом в режим автоматического сопровождения цели.
Задачей предлагаемого изобретения является расширение функциональных возможностей устройства за счет реализации в нем режима полуавтоматического наведения для поиска оператором цели с последующим переводом устройства в режим автоматического сопровождения цели без потери цели при изменении режима.
Сущность технического решения заключается в следующем. Сопровождение перемещающихся в пространстве целей по направлению для осуществления слежения за ними или их уничтожения осуществляется системами автоматического управления по сигналам отклонения от направления на цель, вырабатываемым оптико-электронными, радиолокационными или иными устройствами. Поиск целей в пространстве выполняется оператором с помощью тех же систем автоматического управления, но работающих в режиме полуавтоматического наведения. При этом оператор, подавая соответствующий сигнал управления, управляет скоростью системы автоматического управления положением оптико-электронных, радиолокационных и других устройств, имеющих ограниченное поле зрения, благодаря перемещению которых он просматривает пространство на предмет обнаружения цели. При обнаружении цели оператор соответствующей командой переводит систему автоматического управления положением оптико-электронных, радиолокационных и других устройств непосредственно в режим автоматического сопровождения цели, в котором управление положением перечисленных выше устройств осуществляется по сигналам отклонения от направления на цель, вырабатываемым этими устройствами. При переходе из полуавтоматического режима работы в режим автоматического сопровождения цели в системе автоматического управления могут возникать переходные процессы, характеризующиеся кратковременным увеличением отклонения от направления на цель и рывками, вследствие которых может произойти потеря цели.
Расширение функциональных возможностей системы автоматического сопровождения цели за счет реализации в ней режима полуавтоматического наведения для поиска оператором цели с последующим переводом в режим автоматического сопровождения цели без потери цели может быть достигнуто путем использования сигнала управления скоростью системы автоматического сопровождения в режиме полуавтоматического наведения в качестве начального условия при выработке сигнала управления в режиме автоматического сопровождения.
Указанный технический результат при осуществлении изобретения достигается тем, что в систему автоматического сопровождения цели, содержащую УВСО, механически связанное с объектом управления, последовательно соединенные предварительный усилитель, усилитель мощности, исполнительный двигатель, выход которого механически связан с объектом управления, введены первый ключ, первый вход которого соединен с выходом УВСО, второй управляющий вход соединен с первым входом системы автоматического сопровождения цели, первый масштабный усилитель, вход которого соединен с выходом первого ключа, первый сумматор, первый вход которого соединен с выходом первого масштабного усилителя, второй ключ, первый вход которого соединен с выходом первого сумматора, второй управляющий вход соединен с первым входом системы автоматического сопровождения цели, первый блок коммутации, первый вход которого соединен со вторым входом системы автоматического сопровождения цели, второй вход соединен с выходом второго ключа, третий управляющий вход соединен с первым входом системы автоматического сопровождения цели, элемент задержки на такт, вход которого соединен с выходом первого блока коммутации, а выход соединен со вторым входом первого сумматора, второй сумматор, первый вход которого соединен с выходом второго ключа, второй масштабный усилитель, вход которого соединен с выходом УВСО, а выход соединен со вторым входом второго сумматора, второй блок коммутации, первый вход которого соединен со вторым входом системы автоматического сопровождения цели, второй вход соединен с выходом второго сумматора, третий управляющий вход соединен с первым входом системы автоматического сопровождения цели, а выход соединен с входом предварительного усилителя.
В заявленном устройстве расширение функциональных возможностей системы автоматического сопровождения цели за счет реализации в ней режима полуавтоматического наведения для поиска оператором цели с последующим переводом в режим автоматического сопровождения цели без потери цели достигнуто путем использования сигнала управления скоростью системы автоматического сопровождения в режиме полуавтоматического наведения в качестве начального условия при выработке сигнала управления в режиме автоматического сопровождения.
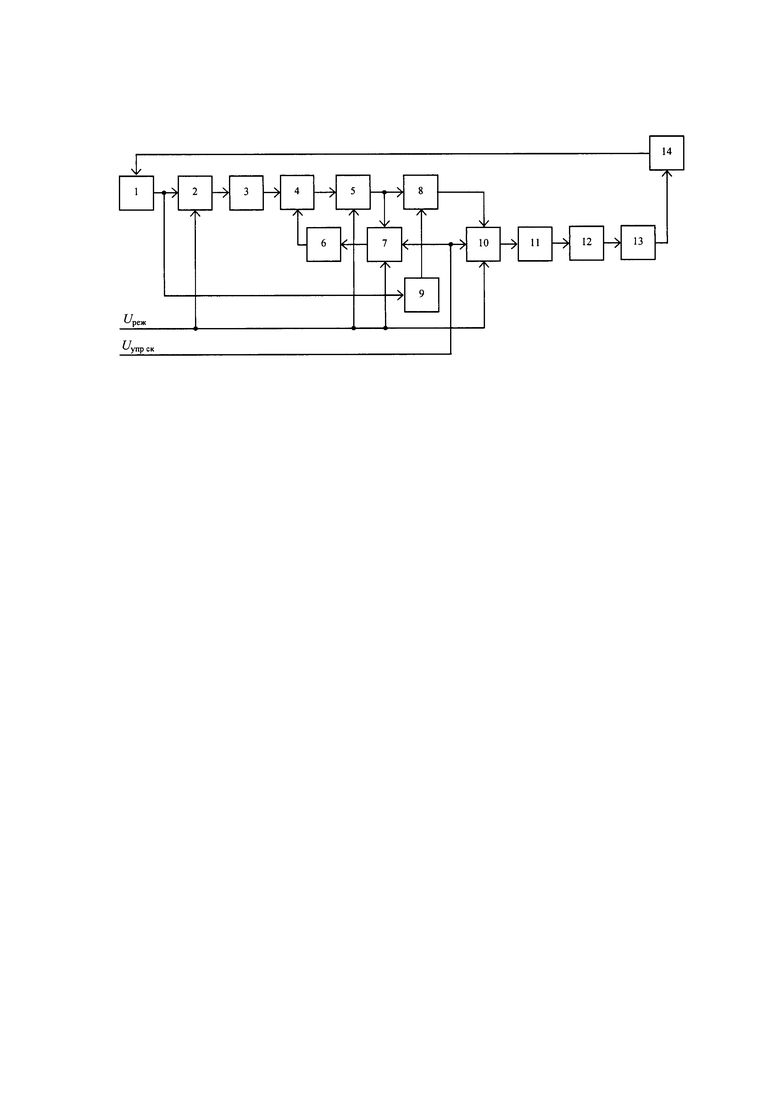
На фигуре приведена схема заявленного устройства.
На фигуре приняты следующие обозначения:
1 - УВСО;
2 - первый ключ;
3 - первый масштабный усилитель;
4 - первый сумматор;
5 - второй ключ;
6 - элемент задержки на такт;
7 - первый блок коммутации;
8 - второй сумматор;
9 - второй масштабный усилитель;
10 - второй блок коммутации;
11 - предварительный усилитель;
12 - усилитель мощности;
13 - исполнительный двигатель;
14 - объект управления;
Среж - сигнал переключения режимов;
Uyпp ск - сигнал заданной скорости наведения объекта управления в режиме полуавтоматического наведения.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше технического результата, заключаются в следующем.
Система автоматического сопровождения цели (фиг.) содержит последовательно соединенные УВСО 1, первый ключ 2, первый масштабный усилитель 3, первый сумматор 4, второй ключ 5, а также элемент задержки на такт 6, первый блок коммутации 7, второй сумматор 8, второй масштабный усилитель 9, второй блок коммутации 10, последовательно соединенные предварительный усилитель 11, усилитель мощности 12, исполнительный двигатель 13, выход которого механически связан с объектом управления 14. УВСО 1 механически связано с объектом управления 14. Первый и второй входы первого блока коммутации 7 соединены соответственно со вторым входом системы автоматического сопровождения цели и с выходом второго ключа 5. Вход и выход элемента задержки на такт 6 соединены соответственно с выходом первого блока коммутации 7 и вторым входом первого сумматора 4. Вход второго масштабного усилителя 9 соединен с выходом УВСО 1. Первый и второй входы второго сумматора 8 соединены соответственно с выходами второго ключа 5 и второго масштабного усилителя 9. Первый и второй входы второго блока коммутации 10 соединены соответственно со вторым входом системы автоматического сопровождения цели и с выходом второго сумматора 8. Выход второго блока коммутации 10 соединен с входом предварительного усилителя 11. Вторые управляющие входы первого и второго ключей 2 и 5, а также третьи управляющие входы первого и второго блоков коммутации 7 и 10 соединены с первым входом системы автоматического сопровождения цели.
Система автоматического сопровождения цели работает следующим образом.
При выполнении оператором поиска цели в пространстве на первом входе системы автоматического сопровождения цели имеется сигнал логического нуля. При этом система автоматического сопровождения цели работает в режиме полуавтоматического наведения. При наличии на первом входе системы автоматического сопровождения цели сигнала логического нуля первый и второй ключи 2 и 5 разомкнуты. Поэтому сигнал с выхода УВСО 1, не проходит на вход первого масштабного усилителя 3, и сигнал с выхода первого сумматора 4 не проходит на первый вход второго сумматора 8. Также при наличии на первом входе системы автоматического сопровождения цели сигнала логического нуля первый и второй блоки коммутации 7 и 10 пропускают на свои выходы сигнал, поступающий на их первые входы со второго входа системы автоматического сопровождения цели. При этом на входы элемента задержки на такт 6 и предварительный усилитель 11 через первый и второй блоки коммутации 7 и 10 поступает сигнал со второго входа системы автоматического сопровождения цели, представляющий собой сигнал заданной скорости наведения объекта управления 14 в режиме полуавтоматического наведения, который усиливается предварительным усилителем 11 и усилителем мощности 12 до уровня, необходимого для управления исполнительным двигателем 13. Исполнительный двигатель 13 приводит в движение объект управления 14.
При обнаружении оператором цели на первом входе системы автоматического сопровождения цели устанавливается сигнал логической единицы, по которому система автоматического сопровождения цели переходит в режим автоматического сопровождения цели. При этом первый и второй ключи 2 и 5 замыкаются и пропускают сигналы со своих входов на свои выходы, первый блок коммутации 7 пропускает на свой выход сигнал с выхода второго ключа 5, второй блок коммутации 10 пропускает на свой выход сигнал с выхода второго сумматора 8. Система автоматического сопровождения цели начинает отрабатывать отклонение объекта управления 14 от направления на цель по сигналу от УВСО 1. При этом совокупность первого масштабного усилителя 3, первого сумматора 4 и элемента задержки на такт 6 с учетом замкнутых цепей второго ключа 5 и первого блока коммутации 7 представляет собой схему цифрового интегратора (Курячий М.И. Цифровая обработка сигналов: учеб. пособие для вузов. - Томск: Томск, гос. ун-т систем упр. и радиоэлектроники, 2009. - 190 с, рис. 1.29). На первом такте после переключения системы автоматического сопровождения цели в режим автоматического сопровождения на выходе элемента задержки на такт 6 еще присутствует сигнал заданной скорости наведения объекта управления 14, в соответствии с которым объект управления 14 перемещался до изменения режима работы. Этот сигнал поступает на второй вход первого сумматора 4 и суммируется с отмасштабированным сигналом отклонения объекта управления 14 от направления на цель, поступающим на первый вход первого сумматора 4 через замкнутый первый ключ 2. В результате вычисление интеграла отклонения объекта управления 14 от направления на цель на выходе первого сумматора 4 при переходе в режим автоматического сопровождения цели начинается не с нулевого начального значения, а со значения, соответствующего сигналу заданной скорости наведения объекта управления 14, в соответствии с которым объект управления 14 перемещался в режиме полуавтоматического наведения, что позволяет существенно уменьшить рывки объекта управления 14 при изменении режима работы и избежать потери цели.
Далее сигнал интеграла отклонения объекта управления 14 от направления на цель с выхода первого сумматора 4 через замкнутый второй ключ 5 поступает на первый вход второго сумматора 8, на второй вход которого с выхода второго масштабного усилителя 9 поступает отмасштабированный сигнал отклонения объекта управления 14 от направления на цель. Сформированный на выходе второго сумматора 8 сигнал управления системой автоматического сопровождения цели при работе в режиме автоматического сопровождения цели через второй блок коммутации 10 поступает на вход предварительного усилителя 11, усиливается предварительным усилителем 11 и усилителем мощности 12 до уровня, необходимого для управления исполнительным двигателем 13. Исполнительный двигатель 13 перемещает объект управления 14 в направлении уменьшения абсолютной величины его отклонения от направления на цель.
Таким образом, введение совокупности новых элементов и связей в систему автоматического сопровождения цели позволило расширить ее функциональные возможности за счет реализации режима полуавтоматического наведения для поиска оператором цели с последующим переводом в режим автоматического сопровождения цели без потери цели.
В предлагаемом изобретении при практической реализации могут быть использованы известные схемные реализации сумматора, ключа, масштабного усилителя, в том числе устройства, реализованные на базе программируемых ЭВМ и контроллеров.
В качестве УВСО могут быть использованы пеленгационные устройства радиолокационных и оптико-электронных станций, измерители рассогласования, а также совокупность задатчика, датчика угла, механически связанного с объектом управления, и сумматора, вычисляющего разность выходных сигналов задатчика и датчика угла.
В качестве предварительного усилителя могут быть использованы его известные схемные реализации, в том числе электронные усилители, выполненные на базе микросхем и полупроводниковых элементов.
В качестве усилителя мощности могут быть использованы электромашинные, полупроводниковые усилители, генераторы, регулируемые насосы.
В качестве исполнительного двигателя могут быть использованы электродвигатели постоянного и переменного тока, гидромоторы, поворотные гидравлические секторы, гидроцилиндры, комбинированные подъемно-уравновешивающие механизмы.
В качестве элемента задержки на такт могут быть использованы его известные схемные реализации, например, регистр (Бойков В.И., Болтунов Г.И., Быстров С.В., Григорьев В.В., Литвинов Ю.В. Цифровая техника систем управления: Учебное пособие. - СПБ.: Университет ИТМО, 2018. - 139 с, с. 37 - 39), устройства задержки, реализованные на базе программируемых ЭВМ и контроллеров.
В качестве блока коммутации могут быть использованы его известные схемные реализации, например известная схема (Патент на изобретение №2537256 МПК G05B 13/02, G05B 11/01. Заявлено 18.02.2014. Опубликовано 27.12.2014, фиг.2).
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод наведения | 2024 |
|
RU2835457C1 |
| Система автоматического сопровождения цели (варианты) | 2023 |
|
RU2818790C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ | 2001 |
|
RU2212687C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
Изобретение относится к области систем автоматического управления, предназначенных преимущественно для автоматического сопровождения перемещающихся в пространстве объектов с неподвижного носителя. Сущность заявленного изобретения заключается в том, что в систему автоматического сопровождения цели, содержащую устройство, вырабатывающее сигнал отклонения объекта управления от направления на цель, механически связанное с объектом управления, а также последовательно соединенные предварительный усилитель, усилитель мощности, исполнительный двигатель, выход которого механически связан с объектом управления, введены: первый и второй ключи, первый и второй масштабные усилители, первый и второй сумматоры, первый и второй блоки коммутации, элемент задержки на такт. Техническим результатом предлагаемой системы является расширение функциональных возможностей за счет реализации в системе режима полуавтоматического наведения для поиска оператором цели с последующим переводом устройства в режим автоматического сопровождения цели без потери цели при изменении режима. 1 ил.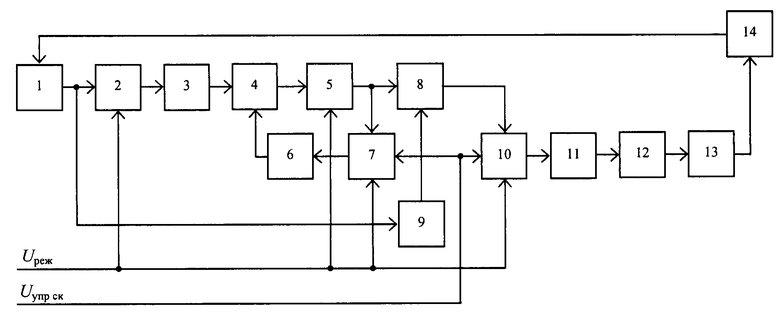
Система автоматического сопровождения цели, содержащая устройство, вырабатывающее сигнал отклонения объекта управления от направления на цель, механически связанное с объектом управления, последовательно соединенные предварительный усилитель, усилитель мощности, исполнительный двигатель, выход которого механически связан с объектом управления, отличающаяся тем, что в нее введены первый ключ, первый вход которого соединен с выходом устройства, вырабатывающего сигнал отклонения объекта управления от направления на цель, второй управляющий вход соединен с первым входом системы автоматического сопровождения цели, первый масштабный усилитель, вход которого соединен с выходом первого ключа, первый сумматор, первый вход которого соединен с выходом первого масштабного усилителя, второй ключ, первый вход которого соединен с выходом первого сумматора, второй управляющий вход соединен с первым входом системы автоматического сопровождения цели, первый блок коммутации, первый вход которого соединен со вторым входом системы автоматического сопровождения цели, второй вход соединен с выходом второго ключа, третий управляющий вход соединен с первым входом системы автоматического сопровождения цели, элемент задержки на такт, вход которого соединен с выходом первого блока коммутации, а выход соединен со вторым входом первого сумматора, второй сумматор, первый вход которого соединен с выходом второго ключа, второй масштабный усилитель, вход которого соединен с выходом устройства, вырабатывающего сигнал отклонения объекта управления от направления на цель, а выход соединен со вторым входом второго сумматора, второй блок коммутации, первый вход которого соединен со вторым входом системы автоматического сопровождения цели, второй вход соединен с выходом второго сумматора, третий управляющий вход соединен с первым входом системы автоматического сопровождения цели, а выход соединен с входом предварительного усилителя.
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| СЛЕДЯЩИЙ ПРИВОД | 2017 |
|
RU2664866C1 |
| US 0005905351 A1, 18.05.1999 | |||
| DE 0060321462 D1, 17.07.2008. | |||
