Изобретение относится к области использования беспилотных летательных аппаратов, далее БЛА.
Известен патент RU 2670368 С1 содержащий корпус, посадочную площадку, упоры с механизмами их перемещения, устройствами для точного позиционирования с использованием перфорированных конусов.
Недостатком данного устройства является не очень надежная система позиционирования, в частности при посадке БЛА боком по отношению оси станции одна из опор может не попасть в конус, что может привести к поломке элементов шасси.
Известен патент RU 2707465 С1 содержащий ряд элементов по точному позиционированию БЛА при посадке. Недостатком является довольно сложная конструкция, что снижает ее надежности при эксплуатации.
Известен патент RU 2723267 С1 с применением револьверной головки для замены батареи БЛА. Недостатком этой конструкции является довольно значительные габариты по ширине, недостаточная точность позиционирования, возможность повреждения элементов разгрузки и загрузки при посадке БЛА, также невозможна замены нескольких компонентов (батареи, груза).
Патент WO 2018042238 А1 с применением вибрирующей посадочной площадки требует применение довольно сложного оборудования и соответственно повышает стоимость конструкции.
Данное изобретение позволяет устранить выше упомянутые недостатки.
Данная задача решается тем, что механизм загрузки по первому варианту выполнен по с использованием платформы с вертикальной осью, расположенной эксцентрично по отношению проему с установкой в центре проема каретки с возможностью ее вертикального перемещения для перемещения контейнера с грузами и батареи на уровень платформы в соответствующие ячейки, при этом корпус станции имеет ограждение выше уровня посадочной площадки, а сбоку ограждения установлен поворотный зонт, по второму варианту предусмотрено установка двух платформ, из них верхняя предназначена для контейнеров с грузом, а нижняя для батарей, при этом с целью точного позиционирования БЛА на посадочную площадку установлены два упора грибовидной формы с возможностью их перемещения от центра к краям площадки и периодически контактирующие с двумя противоположно расположенными направляющими v-образной конфигурации, жестко закрепленные к шасси БЛА.
Пояснения:
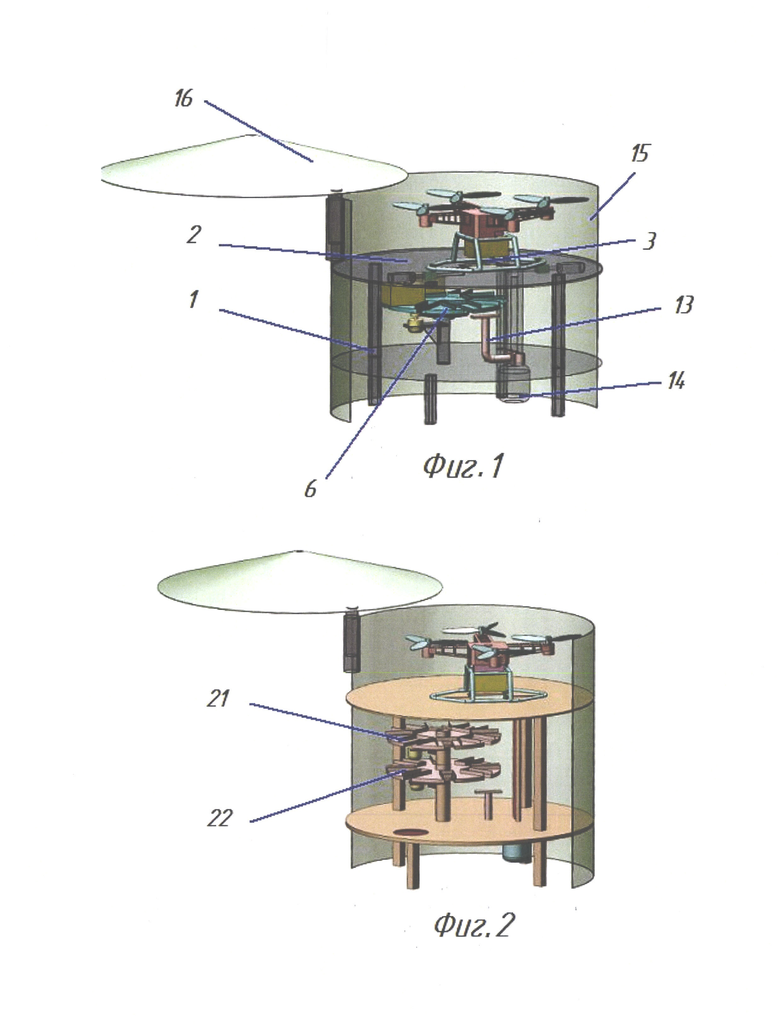
Фиг. 1 - общий вид станции с одной платформой;
фиг. 2 - общий вид станции с двумя платформами;
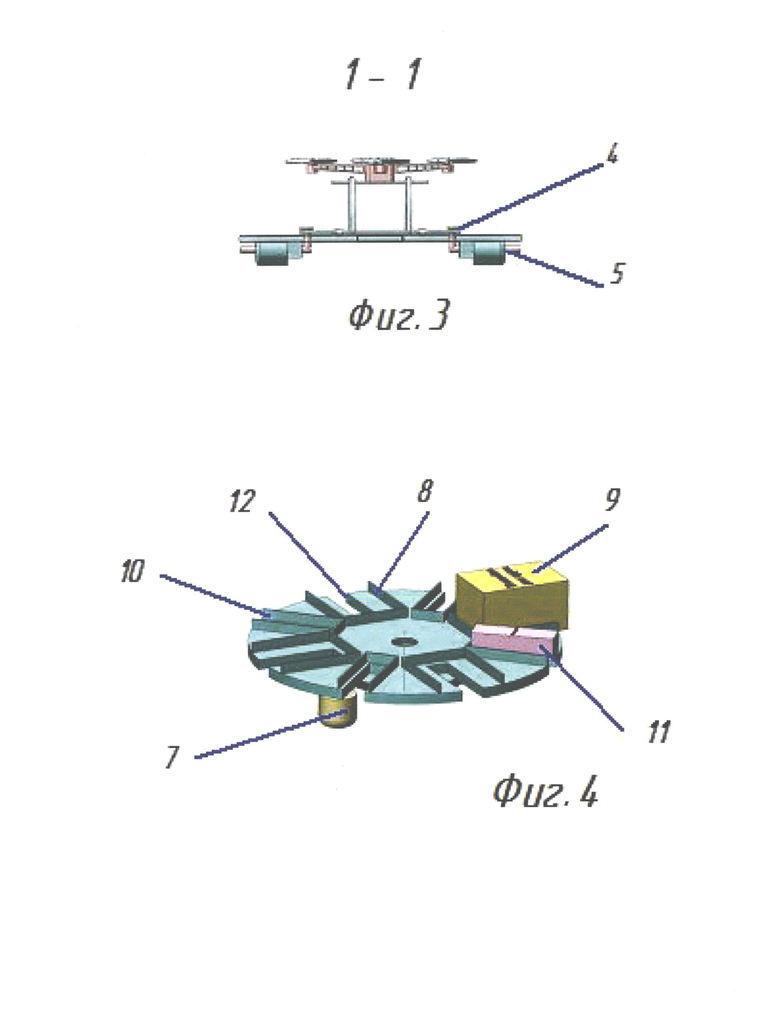
фиг. 3 - сечение 1-1;
фиг. 4 - платформа по первому варианту;
фиг. 5 - этапы точного позиционирования БЛА;
фиг. 6 - этапы перемещения контейнеров с грузом и батареи на платформы по второму варианту.
Согласно фиг. 5:
положение 1 - посадка БЛА на площадку в произвольной форме (со сдвигом и поворотом относительно центральной оси площадки);
положение 2 - начало контакта одного из упоров с направляющей;
положение 3 - окончательная фиксация БЛА за счет одновременного контакта двух упоров с двумя направляющими.
Согласно фиг 6 рассмотрены:
положение 1 - исходное (каретка в нижнем исходном положении);
положение 2 - перемещение каретки до контакта с контейнером с грузом с последующей его фиксацией;
положение 3 - перемещение контейнера для груза на уровень верхней платформы;
положение 4 - перемещение каретки в нижнее положение;
положение 5 - поворот верхней платформы с контейнером с грузом для возможности прохождения каретки вверх;
положение 6 - перемещение каретки в верхнее положение до контакта с батареей с последующей ее фиксацией;
положение 7 перемещение батареи на уровень нижней платформы с последующим перемещением каретки в нижнее исходное положение.
Согласно фиг 1, 3-5 (1 вариант) станция состоит из корпуса 1, посадочной площадки 2 с проемом 3, упорами грибовидной формы 4 с возможностью их перемещения от центра площадки к краям с использованием приводов 5, вращающейся платформы 6 с приводом 7, с ячейкой 8 для контейнера с грузом 9 и ячейки 10 для батареи 11, проемом 12 для прохождения каретки 13 с приводом 14, ограждения 15, поворотного зонта 16. БЛА 17 имеет также шасси 18 с двумя направляющимися 19 и 20 v-образной конфигурации.
По второму варианту отличие состоит в наличие верхней платформы 21 для размещения контейнеров с грузом и нижней платформы 22 для размещения батарей, при этом проемы в верхней платформе по размеру больше ширины батареи для возможности ее прохождения на уровень нижней платформы, а в нижней меньше для ее фиксации. Остальные элементы аналогичны первому варианту.
Работает устройство следующим образом.
Согласно первого варианта БЛА 17 зависает над посадочной площадкой 2 одновременно ориентируется в заданном положении, при этом зонт 16 повернут для возможности посадки, далее происходит посадка БЛА и ввиду турбулентности потоков воздуха возможность точного позиционирования нарушается (перекос, смещение от центра посадки), за счет перемещения упоров 4 при контакте последних с направляющими 19 и 20 происходит выравнивание БЛА с одновременным прижимом его к плоскости площадки с установкой в точное положение относительно центра проема 3, далее каретка 13 перемещается до контакта с контейнером для груза 9 с его расфиксацией внутри корпуса БЛА (конструкция условно не показана), за счет собственного веса на каретке или с применением электромагнита устанавливается на верхней плоскости каретки 13 и далее при прохождении каретки ниже уровня платформы 6 контейнер с грузом 9 фиксируется в ячейке 8. Аналогично происходит перемещение батареи 11 в свободную ячейку 10. Загрузка контейнера с заряженной батареей и контейнера с грузом в БЛА проводится в обратной последовательности. При необходимости в зависимости от погодных условий может производиться поворот зонта, изолируя посадочную площадку от осадков. Во втором операции аналогичны. Различие только в размещении контейнеров с грузом на верхней платформе 21, а батарей на нижней платформе 22.
Данная конструкция проста в изготовлении и может найти применении для совершения длительных полетов БЛА с периодической перезарядкой и сменой грузов, например при патрулировании объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДОСТАВКИ КОНТЕЙНЕРА С ПОМОЩЬЮ ДРОНА | 2016 |
|
RU2646689C1 |
| Устройство для позиционирования беспилотного летательного аппарата на посадочной площадке | 2019 |
|
RU2707465C1 |
| БАЗОВАЯ СТАНЦИЯ ДЛЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2670368C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Стартовый контейнер | 2018 |
|
RU2678381C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2024 |
|
RU2837679C1 |
| Система доставки груза на место проведения горнодобывающим субъектом взрывных работ (варианты) | 2024 |
|
RU2840365C1 |
| Система доставки груза горнодобывающим субъектом на место проведения взрывных работ (варианты) | 2024 |
|
RU2839710C1 |
| Корабельный динамический аэропричал для мультикоптеров | 2023 |
|
RU2828127C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ТРАНСПОРТИРОВКИ ГРУЗОВ | 2023 |
|
RU2833448C1 |


Изобретение относится к области использования беспилотных летательных аппаратов (БЛА). Станция для БЛА содержит корпус (1), посадочную площадку (2), механизмы загрузки, систему упоров (4) с приводами (5). Механизм загрузки выполнен с использованием платформы (6) с вертикальной осью, расположенной эксцентрично по отношению проему (3) с установкой в центре проема каретки (13), с возможностью ее вертикального перемещения для перемещения контейнера с грузом (9) и батареи (11) на уровень платформы в соответствующие ячейки. Корпус станции имеет ограждение (15) выше уровня посадочной площадки, а сбоку ограждения установлен поворотный зонт (16). Предусмотрена установка двух платформ, из них верхняя (21) предназначена для контейнеров с грузом, а нижняя (22) для батареи. На посадочную площадку установлены два упора грибовидной формы с возможностью их перемещения от центра к краям площадки и периодически контактирующие с двумя противоположно расположенными направляющими (19 и 20) v-образной конфигурации. Конструкция проста в изготовлении. Обеспечивается периодическая перезарядка и смена грузов при длительных полетах БЛА. 6 ил.
Станция для беспилотных летательных аппаратов, содержащая корпус, посадочную площадку, механизмы загрузки, систему упоров с приводами, отличающая тем, что
механизм загрузки выполнен с использованием платформы с вертикальной осью, расположенной эксцентрично по отношению к проему с установкой в центре проема каретки, с возможностью ее вертикального перемещения для перемещения контейнера с грузами и батареи на уровень платформы в соответствующие ячейки, при этом корпус станции имеет ограждение выше уровня посадочной площадки, а сбоку ограждения установлен поворотный зонт;
или механизм загрузки предусматривает установку двух платформ, из них верхняя предназначена для контейнеров с грузом, а нижняя для батарей, при этом с целью точного позиционирования БЛА на посадочную площадку установлены два упора грибовидной формы с возможностью их перемещения от центра к краям площадки и периодически контактирующие с двумя противоположно расположенными направляющими v-образной конфигурации, жестко закрепленные к шасси БЛА.
| БАЗОВАЯ СТАНЦИЯ ДЛЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2670368C1 |
| Устройство для позиционирования беспилотного летательного аппарата на посадочной площадке | 2019 |
|
RU2707465C1 |
| WO 2018042238 A1, 08.03.2018 | |||
| БУРОВОЙ СТАНОК | 0 |
|
SU217321A1 |
| ПОСАДОЧНАЯ ПЛАТФОРМА ДЛЯ БПЛА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2020 |
|
RU2746538C1 |
| WO 2019055702 A1, 21.03.2019. | |||

