Изобретение относится к тренажерам для подготовки водителей гусеничных машин.
Наиболее близким техническим решением к предлагаемому изобретению является динамический тренажер вождения гусеничной машины (см. патент № 2396604, бюл. № 22 от 10 августа 2010 г. [1]), который принят в качестве прототипа).
Динамический тренажер вождения гусеничной машины, который взят в качестве прототипа, содержит кабину с блоком датчиков положения органов управления переключения передач, сцепления, тормоза поворота и остановочного тормоза, связанную с входом блока моделирования двигателя, выход которого соединен с входом блока моделирования трансмиссии, первый и второй интеграторы, инверторы и сумматор, подключенный к датчику остановочного тормоза и второму инвертору, имеющему связь с входом второго интегратора, а первый интегратор, подключен входом к выходу первого инвертора [1].
Известно, что основными показателями, определяющими подвижность гусеничных машин с механическими и гидромеханическими трансмиссиями, являются: тип коробки передач, число ступеней в ней и закон изменения передаточных чисел по ступеням; тип механизма поворота, количество и величины расчетных радиусов поворота, тип приводов управления механизмами поворота; тип остановочных тормозов и тип привода управления ими. Эти характеристики оказывают существенное влияние на тяговые качества гусеничной машины. Кроме того, от типа механизма поворота, количества и величины расчетных радиусов поворота, типа остановочных тормозов зависят ограничения скорости по заносу и безопасности движения. Каждой передаче соответствует свой радиус поворота, причем с увеличением номера передачи в коробке передач возрастает его величина. Поворот гусеничной машины происходит за счет включения в бортовой коробке передач со стороны отстающего борта передачи, пониженной на одну ступень. Поворот гусеничной машины на первой передач и передаче заднего хода осуществляется торможением отстающей гусеницы до ее полной остановки [2].
Недостатком известного тренажера является отсутствие возможности моделирования работы механической коробки передач при включении тормоза поворота и остановочного тормоза гусеничной машины.
Цель изобретения - повышение точности моделирования работы механической коробки передач за счет учета влияния тормоза поворота и остановочного тормоза.
Поставленная цель достигается тем, что тренажер дополнительно содержит последовательно соединенные усилитель с блоком ограничения, делитель, блоки преобразования и коммутаторы, причем группа выходов управляющими входами первого и второго коммутатора, и управляющие входы третьего коммутатора подключены соответственно к выходам датчика переключения передач, вход и выход второго инвертора через делитель соединены со вторым блоком преобразования, выходы которого подключены соответственно к выходу и второму входу сумматора, а выход делителя через первый блок преобразования подключен к входу второго интегратора, выход датчика сцепления подключен соответственно к управляющему входу блока ограничения, выход датчика остановочного тормоза соединен с третьим входом сумматора, а выход датчика тормоза поворота подключен к входу третьего коммутатора, вход блока ограничения соединен с выходом усилителя, а выход - со входом второго коммутатора, группа выходов которого подключена к группе входов второго интегратора, имеющего связь через первый блок преобразования с первым входом первого интегратора, группа входов которого подключена к группе выходов первого коммутатора, вход которого является выходом блока моделирования трансмиссии, а выход первого коммутатора через инвертор соединен со вторым входом первого интегратора, подключенного выходом к входу усилителя.
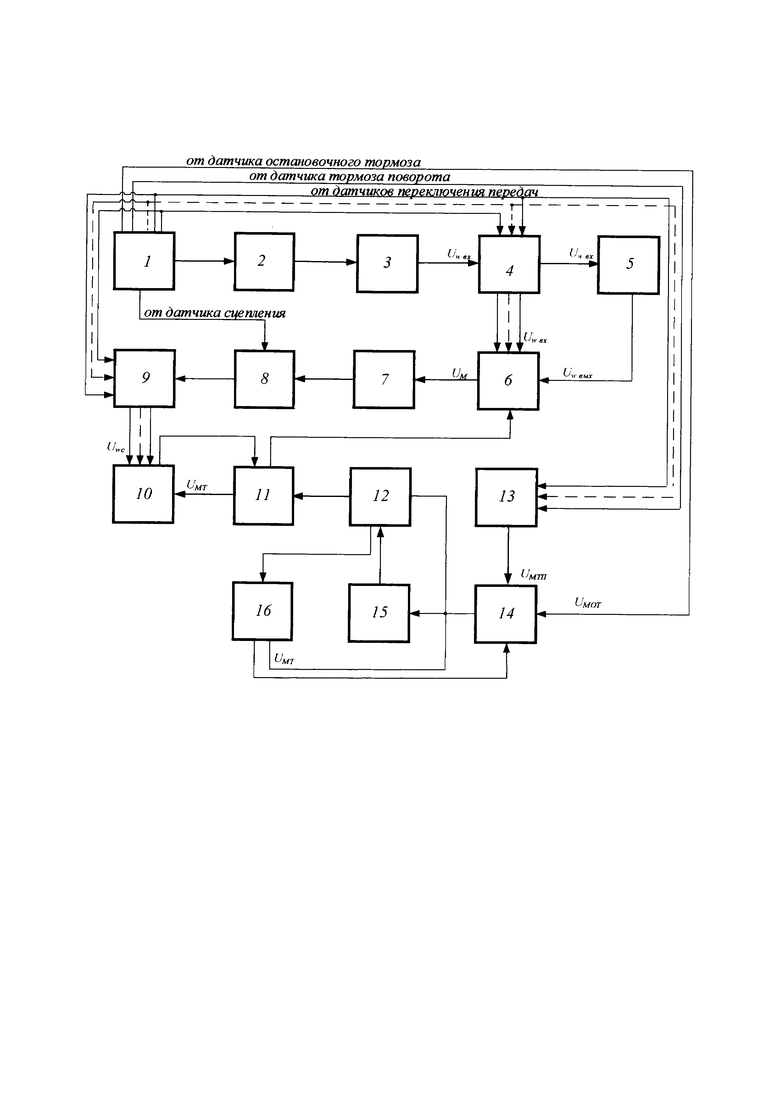
Изобретение поясняется чертежом, где приведена функциональная схема тренажера гусеничной машины.
Тренажер гусеничной машины содержит кабину 1 с блоком датчиков положения органов управления переключения передач, сцепления, тормоза поворота и остановочного тормоза, блок 2 моделирования двигателя, блок 3 моделирования трансмиссии, первый коммутатор 4, первый инвертор 5, первый интегратор 6, усилитель 7, блок 8 ограничения, второй коммутатор 9, второй интегратор 10, первый блок 11 преобразования, делитель 12, третий коммутатор 13, сумматор 14, второй инвертор 15, второй блок 16 преобразования.
Кабина 1 с блоком датчиков положения органов управления переключения передач, сцепления, тормоза поворота и остановочного тормоза связана с входом блока 2 моделирования двигателя, выход которого соединен с входом блока 3 моделирования трансмиссии.
Группа выходов блока датчиков переключения передач соединена соответственно с управляющими входами первого коммутатора 4, второго коммутатора 9 и третьего коммутатора 13.
Вход и выход второго инвертора 15 через делитель соединены со вторым блоком 16 преобразования, выходы которого подключены соответственно к выходу и второму входу сумматора 14.
Выход датчика сцепления подключен соответственно к управляющему входу блока 8 ограничения, выход датчика остановочного тормоза соединен с третьим входом сумматора 14, а выход датчика тормоза поворота подключен к входу третьего коммутатора 13.
Тренажер гусеничной машины работает следующим образом.
В процессе движения по маршруту обучаемый находится в кабине 1 и воздействует на органы управления, имеющие связь с блоком датчиков положения педали сцепления, рычага переключения передач, педалей и рычагов тормоза поворота и остановочного тормоза.
Напряжение, пропорциональное оборотам коленчатого вала двигателя и крутящему моменту, с блока 2 моделирования двигателя поступает на блок 3 моделирования трансмиссии. Моделирующие узлы, входящие в состав трансмиссии, определяются конструктивными особенностями моделируемой машины.
На выходе блока 3 моделирования трансмиссии образуется напряжение Uw вх, пропорциональное оборотам входного вала коробки передач. Это напряжение подается на вход первого коммутатора 4, который в зависимости от включенной передачи передает это напряжение на определенный вход первого 6 интегратора, каждый вход которого соответствует передаточному числу коробки передачи при включении соответствующей передачи.
Управление первым 4, вторым 9 и третьим 13 коммутаторами, а также выбор первого 6 и второго 10 интеграторов осуществляется с помощью датчика переключения передач.
При включении первой передачи выключаются те коммутирующие элементы коммутаторов, которые электрически соединяют вход с первым входом первого интегратора 6, выход блока 8 ограничения с первым входом второго интегратора 10 и выход датчика тормоза поворота с третьим входом сумматора 14. Остальные цепи коммутаторов остаются разомкнутыми.
Третий коммутатор 13 подключает выход датчика тормоза к первому входу сумматора 14 только при включенной первой передачи или передачи заднего хода.
При включении второй передачи включаются другие коммутирующие элементы первого коммутатора 4 и второго коммутатора 9, которые соединяют вторые входы первого интегратора 6 и второго интегратора 10. То же происходит при включении любой другой передачи.
При включении передачи заднего хода напряжение, пропорциональное оборотам входного вала коробки передач Uw вх, поступает на соответствующий вход первого интегратора 6 через первый инвертор 5, чем достигается изменение полярности напряжения, пропорционального оборотам выходного вала коробки передач Uw вых-
Это напряжение снимается с выхода второго интегратора 10. На входе первого интегратора 6 напряжения Uw вх и Uw вых складываются, а на выходе первого интегратора 6 формируется напряжение, пропорциональное действующему крутящему моменту UМ.
При этом решается уравнение  где С -
где С -
упругость элементов коробки передач; Uм - напряжение, пропорциональное крутящему моменту.
Напряжение UМ через усилитель 7 поступает на блок 8 ограничения, который моделирует нелинейность трения. Этот блок ограничивает напряжение, пропорциональное крутящему моменту UМ⋅
Уровень ограничения определяется управляющими напряжениями, пропорциональными максимальному моменту сцепления, поступающими от датчика сцепления.
Если напряжение UМ, пропорциональное крутящему моменту, проходит через блок 8 ограничения, то в этом случае моделируется буксование фрикционных элементов (дисков) сцепления. Если это напряжение ограничено полностью, то моделируется полностью разомкнутые диски сцепления.
В случае отсутствия ограничения моделируется передача момента без пробуксовки дисков.
Напряжение с выхода блока 8 ограничения поступает на вход второго коммутатора 9 с учетом коэффициента передачи i коробки передач.
На свободный вход второго интегратора 10 подается напряжение, пропорциональное моменту сопротивления вращению.
Первый блок 11 преобразования служит для предотвращения заряда интегратора при отсутствии напряжения то есть служит для моделирования действия момента от сил трения на выходном валу коробки передач.
Кроме этого, через этот первый блок 11 преобразования, в зависимости от полярности выходного напряжения второго интегратора 10, на его вход подается напряжение, пропорциональное тормозному моменту Uмт.
С помощью интегратора 10, решается уравнение  где f - момент инерции, вращающихся масс коробки передач, приведенный к выходному валу коробки передач.
где f - момент инерции, вращающихся масс коробки передач, приведенный к выходному валу коробки передач.
Напряжение UМТ на второй блок 16 преобразования подается с выхода сумматора 14 и второго инвертора 15. В сумматоре складывается напряжения UМТП, пропорциональное тормозному моменту от тормоза поворота, и UМОТ, пропорциональное тормозному моменту от остановочного тормоза.
Напряжение UМТП, пропорциональное тормозному моменту от тормоза поворота, поступает на третий коммутатор 13 с датчика 12 тормоза поворота.
Третий коммутатор 13 передает это напряжение на вход сумматора 14 только при поступлении на его управляющий вход сигналов, соответствующих включению первого передачи или передачи заднего входа в блоке датчика переключения передач.
Второй блок 16 преобразования включенный в обратную связь сумматора 14, служит для создания зоны нечувствительности, чем моделируется наличие механического люфта в приводе тормоза.
Таким образом, тренажер воспроизводит работу коробки передач при включении остановочного тормоза и тормоза поворота, чем повышается точность моделирования динамики движения гусеничной машины, а следовательно, позволит повысить качество обучения, сократить расход моторесурса реальных машин, используемых для обучения, и сократить расход топлива.
Список использованных источников
1. Динамический тренажер вождения гусеничной машины: патент № 2396604. - М.: ФИПС, МПК G09B 9/04 бюл. № 22 от 10.08.2010 г. (прототип).
2. Теория быстроходных гусеничных транспортно-тяговых машин. - М: 2018. -С. 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| Устройство для моделирования механической передачи | 1981 |
|
SU982032A2 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Устройство для моделирования механической передачи | 1982 |
|
SU1068953A1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2009 |
|
RU2396604C1 |
| Устройство для моделирования динамики движения гусеничной машины | 1979 |
|
SU883929A1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2009 |
|
RU2410756C1 |
| Устройство для моделирования механической передачи | 1985 |
|
SU1254515A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 1999 |
|
RU2165646C1 |
| Устройство для моделирования динамики движения гусеничной машины | 1981 |
|
SU1003115A1 |
Изобретение относится к тренажерам. Тренажер гусеничной машины содержит кабину с блоком датчиков положения органов управления переключения передач, сцепления, тормоза поворота и остановочного тормоза, связанную с блоком моделирования двигателя, который соединен с блоком моделирования трансмиссии. Дополнительно введены последовательно соединенные усилитель с блоком ограничения, делитель, блоки преобразования и коммутаторы. Повышается точность моделирования коробки передач. 1 ил.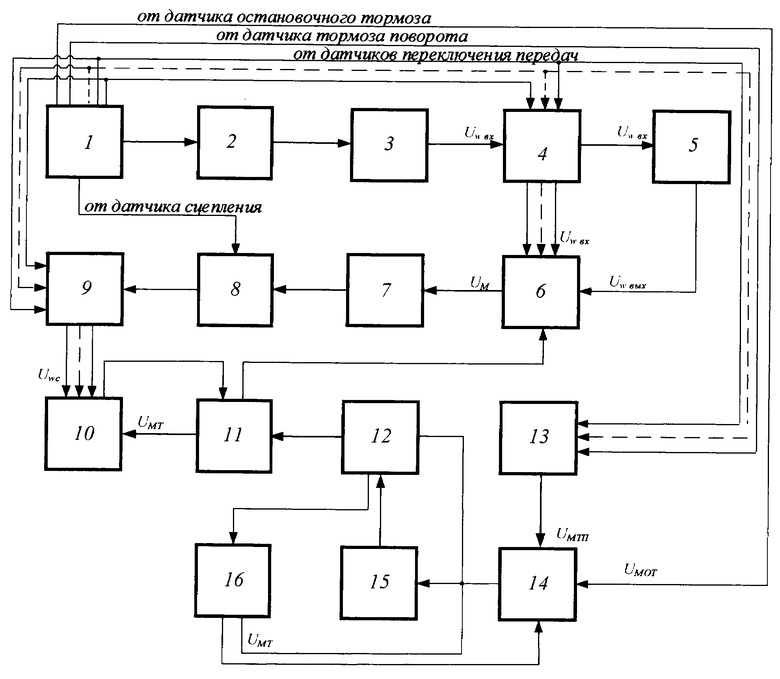
Тренажер гусеничной машины содержит кабину с блоком датчиков положения органов управления переключения передач, сцепления, тормоза поворота и остановочного тормоза, связанную с входом блока моделирования двигателя, выход которого соединен с входом блока моделирования трансмиссии, первый и второй интеграторы, инверторы и сумматор, подключенный к датчику остановочного тормоза и второму инвертору, имеющему связь с входом второго интегратора, а первый интегратор подключен входом к выходу первого инвертора, отличающийся тем, что в него дополнительно введены последовательно соединенные усилитель с блоком ограничения, делитель, блоки преобразования и коммутаторы, причем группа выходов управляющими входами первого и второго коммутатора, и управляющие входы третьего коммутатора подключены соответственно к выходам датчика переключения передач, вход и выход второго инвертора через делитель соединены со вторым блоком преобразования, выходы которого подключены соответственно к выходу и второму входу сумматора, а выход делителя через первый блок преобразования подключен к входу второго интегратора, выход датчика сцепления подключен соответственно к управляющему входу блока ограничения, выход датчика остановочного тормоза соединен с третьим входом сумматора, а выход датчика тормоза поворота подключен к входу третьего коммутатора, вход блока ограничения соединен с выходом усилителя, а выход - со входом второго коммутатора, группа выходов которого подключена к группе входов второго интегратора, имеющего связь через первый блок преобразования с первым входом первого интегратора, группа входов которого подключена к группе выходов первого коммутатора, вход которого является выходом блока моделирования трансмиссии, а выход первого коммутатора через инвертор соединен со вторым входом первого интегратора, подключенного выходом к входу усилителя.
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2009 |
|
RU2396604C1 |
| CN 201508632 U, 16.06.2010 | |||
| Тренажер для обучения вождению гусеничной машины | 2020 |
|
RU2750122C1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| РУЧНОЙ РЫЧАЖНЫЙ ПРЕСС | 1926 |
|
SU7228A1 |
| JP 60075859 A, 30.04.1985. | |||

