Изобретение относится к области мобильной робототехники, а именно к подводным роботам.
Известен амфибийный змееподобный робот по патенту CN №101746237, который представляет собой устройство, исполненное в виде змеи и обладающее амфибийными свойствами. Робот состоит из последовательно соединенных модулей с возможностью поворота смежных модулей относительно друг друга в двух плоскостях путем изменения углов рыскания и тангажа. Соединения модулей защищены водонепроницаемой растяжимой оболочкой. Оба концевых модуля робота защищены прозрачной пластиковой купольной крышкой.
Известно многозвенное транспортное средство по патенту RU№130916 ПМ. Полезная модель относится к транспортным средствам, способным передвигаться по поверхности различных сред, внутри труб или под водой. Транспортное средство содержит сочлененные между собой с возможностью углового смещения относительно друг друга звенья в виде полых цилиндров, конструкция которых обеспечивает отклонение их относительно друг друга в горизонтальной и вертикальной плоскостях, а также по отношению к головной части и хвостовой на определенные углы. Соединительные элементы устройства выполнены из двух шарнирно соединенных между собой частей.
Известны змееподобные подводные роботы такие как, например, по патентам CN №204149158, CN №103358305, CN №106346462, CN №105171722, которые используют аналогичные приведенным выше принципы организации движения и обладают рядом похожих особенностей их конструктивного исполнения.
Все приведенные выше подводные змееподобные роботы обладают рядом схожих недостатков. А именно, 1) конструктивная сложность реализации управляемого универсального шарнира в ограниченном объеме обуславливает ограниченность диапазонов угловых перемещений шарниров, особенно это относится к двухстепенным шарнирам, 2) для организации плавного движения, подобного змеевидному необходимо в состав робота включать большое число модулей, согласованное управление которыми для целенаправленного движения робота под водой представляет собой сложную задачу, которая в условиях неопределенности параметров подвижной среды многократно затрудняется, 3) энергозатратность одновременного вращения приводами шарниров для создания волнообразного движения робота отрицательно сказывается на длительности его автономной работы.
В качестве прототипа выбран подводный робот по патенту US №2018021945, который содержит набор модулей-звеньев, соединенных друг с другом соединительными модулями для изменения формы робота с целью реализации изгибного движения робота, и несущих несколько тяговых (упорных) устройств, при этом, одно из тяговых устройств, установленное на одном из концов робота, создает усилие вдоль оси робота для обеспечения продольного движения робота, а другие тяговые устройства размещены в тяговых модулях стационарно попарно и создают перпендикулярные друг другу и оси модуля тяговые усилия, предназначенные для управления направлением движения. Модули-звенья также могут оснащаться разного рода полезной нагрузкой, например, ТВ камерами и/или неким инструментом. Такая структура робота позволяет произвольно изменять форму робота и при необходимости фиксировать ее, т.е. реконфигурировать робот, а с помощью тяговых устройств, установленных на тяговых модулях, которые определенным образом распределены и сориентированы по длине робота, предполагается осуществлять направленное движение робота и управление перемещением и ориентацией рабочего инструмента.
Прототипу присущи недостатки, выявленные у чисто змееподобных подводных роботов, связанные с реализацией волнообразного принципа движения. В тоже время наличие ряда тяговых модулей, на одном из которых жестко установлено одно осевое тяговое устройство, а на других жестко установлены два поперечных тяговых устройства, при фиксированной взаимной ориентации тяговых модулей между собой в осевом направлении, задаваемой конструктивно при изготовлении и сборке робота, приводит, в ряде случаев, к принципиальной невозможности создания тяговыми устройствами требуемого воздействия (главного вектора сил и главного вектора моментов) для выполнения заданной функции по назначению, а именно, управляемого целенаправленного движения. Отмеченное обстоятельство существенно снижает эффективность практического применения данного робота.
Задачей изобретения является обеспечение управляемости движения робота в любой конфигурации, повышение энергоэффективности системы тяговых модулей, упрощение конструкции модулей, операций изготовления и сборки робота в различных последовательностях соединения модулей и архитектуры системы управления роботом.
Задача обеспечения управляемости движения робота в любой конфигурации решается следующим образом:
в состав робота включены тяговые модули, внешние корпуса которых выполнены в форме прямых круговых цилиндров с установленными на них парами тяговых устройств с регулируемой силой тяги, причем каждое тяговое устройство установлено на выходном валу размещенного внутри корпуса тягового модуля полнооборотного сервопривода, причем оси вращения поворотных сервоприводов перпендикулярны оси цилиндра тягового модуля, а направление усилия, создаваемого тяговым устройством, перпендикулярно оси вращения поворотных сервоприводов.
Кроме того, управляемость улучшается путем обеспечения контролируемой плавучести и остойчивости робота за счет конструктивно задаваемой плавучести и остойчивости жестких узлов модулей.
Задача повышения энергоэффективности решается путем снижения гидродинамических сил сопротивления за счет обеспечения замкнутости обтекаемого внешнего корпуса робота в любой конфигурации.
Этой же цели служит оснащение каждого модуля управляющим контроллером, позволяющим обрабатывать сигналы от датчиков модуля и внешних устройств и формировать сигналы для управления приводами модуля.
Задача упрощения конструкции модулей, операций изготовления и сборки робота в различных последовательностях соединения модулей и архитектуры системы управления роботом решается за счет конструкции реконфигурирующих модулей на основе одностепенного цилиндрического шарнира вращения, минимизации номенклатуры модулей, используемых при сборке робота, универсализации модулей за счет универсальности механических и электрических интерфейсов модулей и объединения модулей в сеть путем подсоединения к общей шине данных.
Сущность изобретения поясняется следующими рисунками и чертежами.
На фиг. 1 показан подводный реконфигурируемый модульный робот в конфигурации «торпеда», аксонометрия.
На фиг. 2 показан подводный реконфигурируемый модульный робот в конфигурации «торпеда» без внешних корпусов-обтекателей, аксонометрия.
На фиг. 3 показан тяговый модуль с развернутыми тяговыми устройствами, аксонометрия.
На фиг. 4 показан модуль продольной трансформации, аксонометрия.
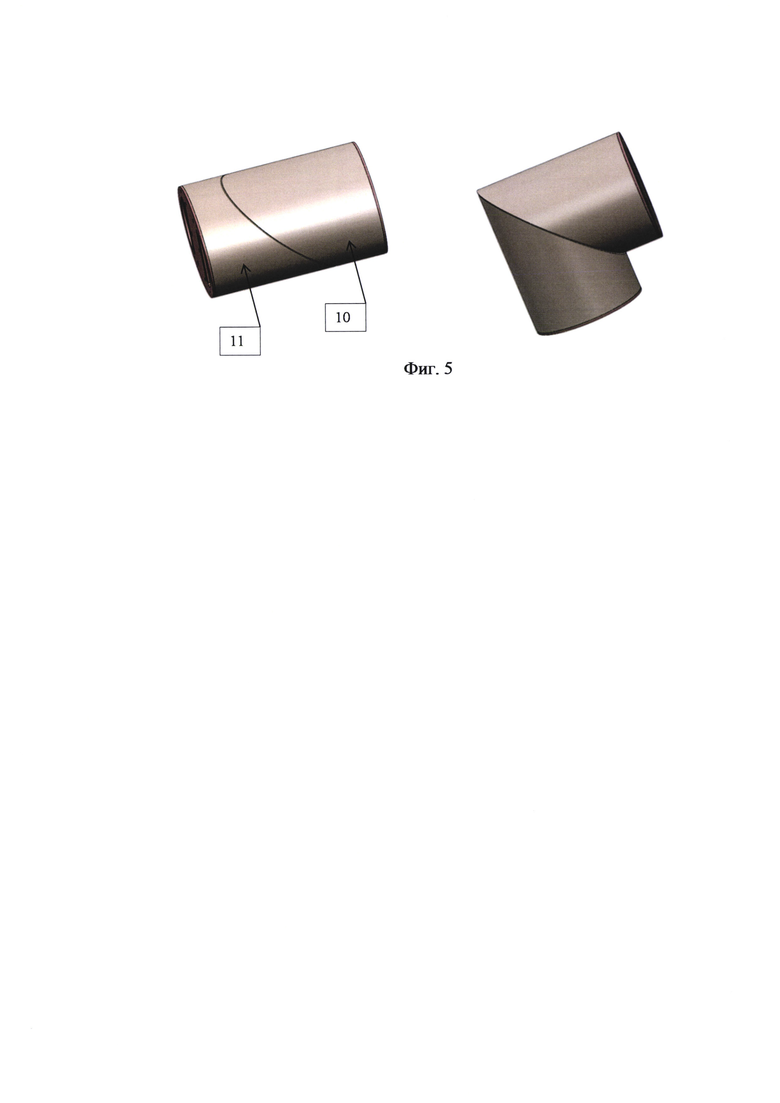
На фиг. 5 показан модуль поперечной трансформации в двух конфигурациях.
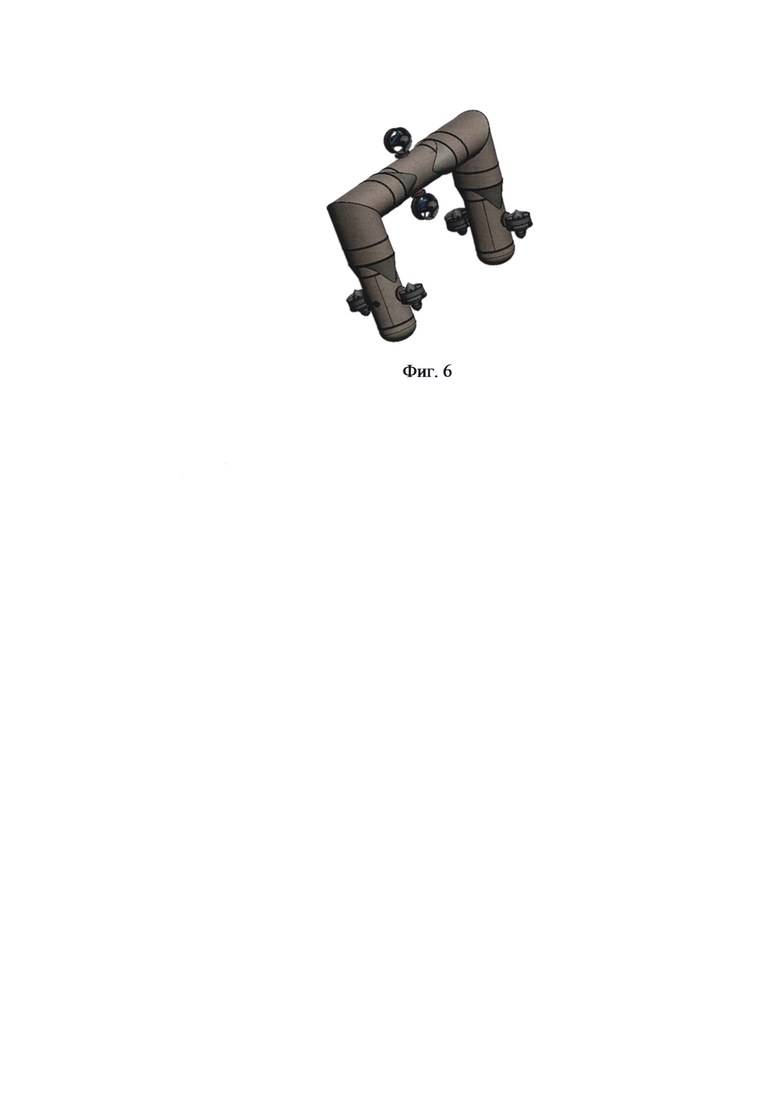
На фиг. 6 показан подводный реконфигурируемый модульный робот в конфигурации «портал», аксонометрия.
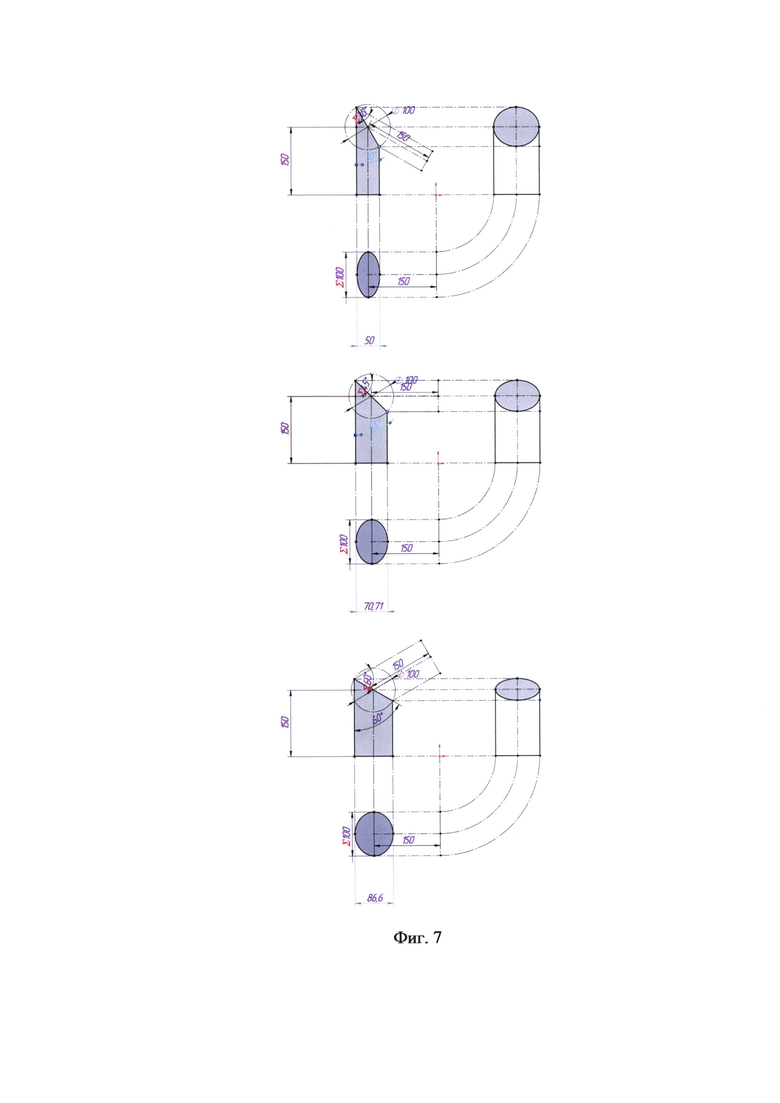
На фиг. 7 показаны три ортогональные проекции эллиптического цилиндра с полуосями а и b образующего эллипса, усеченного плоскостью под углом γ, а) γ<30°, б) γ=45°, с) γ=60°.
На фиг. 8 показан пример последовательности реконфигурации робота из положения «торпеда» в положение «портал».
Подводный реконфигурируемый модульный робот включает в себя тяговые модули 1, реконфигурирующие продольные модули 2, реконфигурирующие поперечные модули 3, а также служебные модули 4, содержащие бортовую аппаратуру и оборудование, обеспечивающие функционирование робота по назначению. Внешние корпуса тяговых модулей 1 выполнены в форме прямых круговых цилиндров с установленными на внутреннем каркасе парами тяговых устройств 5 с регулируемой силой тяги, причем каждое тяговое устройство установлено на выходном валу 6 размещенного внутри корпуса тягового модуля полнооборотного сервопривода.
Реконфигурирующий продольный модуль 2, состоит из двух частей, связанных приводным одностепенным шарниром вращения, при этом продольные модули выполнены из двух частей 7, 8 с внешними корпусами в форме прямых цилиндров, в одной из которых 7 в отсеке внутреннего каркаса установлен полнооборотный сервопривод с осью вращения, совпадающей с осью цилиндра 9. В свою очередь, поперечный реконфигурирующий модуль выполнен из двух частей 10, 11 с внешними корпусами в форме прямых эллиптических цилиндров, усеченных проходящей под углом γ=arcsin(b/a) к их осям через большую ось образующего эллипса с большой а и малой Ь осями плоскостью, в одной из частей модуля 10 в отсеке внутреннего каркаса установлен полнооборотный сервопривод с осью вращения 12 (см фиг. 2), проходящей перпендикулярно плоскости через центр образованного кругового сечения с диаметром равным большой полуоси эллипса а. На фиг. 7 а, б, в схематично показаны примеры исполнения поперечных реконфигурирующих модулей с углами трансформации γ, равными 30°, 45° и 60°, с большой осью а равной 100 условным единицам и с малыми осями, соответственно, равными 50, 70, 71 и 86,6 условных единиц.
Для обеспечения плавности обтекания робота внешний корпус приводной части продольного модуля 7 также имеет эллиптическое сечение с большой а и малой b осями для стыковки с поперечными модулями, а внешний корпус второй части продольного модуля 8 и внешний корпус тягового модуля 1 имеют диаметры равные малой оси эллипса b, при этом на внешнем корпусе 7 установлены согласующие обтекатели 13.
Каждый модуль 1-4 имеет на основаниях корпусов механический и электрический интерфейс, позволяющий соединять модули в произвольном порядке. Герметичность электрических интерфейсов обеспечивается применением разъемов в герметичном исполнении.
Служебные модули 4 для обеспечения функционирования робота могут оснащаться, например, телекамерами, осветителями под прозрачными колпаками-обтекателями, захватными устройствами, гидролокаторами, регистраторами физических полей, устройствами связи, дополнительными источниками питания, устройствами изменения плавучести, манипуляторами и т.д.
Подводный реконфигурируемый модульный робот работает следующим образом.
Из модулей с использованием механических и электрических интерфейсов собирается в выбранном порядке желаемая конфигурация, например, конфигурация «торпеда» с соосным расположением модулей, как показано на Фиг. 2. Далее на внутренние корпуса устанавливаются обтекатели (см. Фиг. 1).
В этой конфигурации подводный робот может выполнять движение по задаваемому заранее или определяемому системой управления робота пространственному маршруту в пункт назначения. Для перемещения по маршруту робот использует винтовые тяговые устройства - импеллеры с управляемой ориентацией тяги за счет поворотов импеллеров сервоприводами тяговых модулей и регулирования силы тяги за счет скорости вращения самих винтов.
Для выполнения операций маневрирования вблизи объектов или в сложном рельефе робот может быть реконфигурирован с помощью модулей реконфигурации в конфигурацию, например, «портал» (см. Фиг. 8). Преимущество конфигурации «портал» состоит в возможности получить большее расстояние между центром давления и центром масс робота. Это обеспечивает лучшую остойчивость, меньшую частоту свободных колебаний. Управление перемещениями робота после перехода в конфигурацию «портал» выполняется с помощью регулирования тяги импеллеров и направления их осей. При необходимости для получения желаемого качества управления перемещением могут быть использованы также и приводы модулей реконфигурации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| Способ управляемого изменения крена автономного необитаемого подводного аппарата | 2024 |
|
RU2823820C1 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| Манипулятор | 2017 |
|
RU2671987C1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНО-НАДВОДНЫЙ АППАРАТ ПЛАНЕРНОГО ТИПА | 2024 |
|
RU2831312C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| САМОТРАНСПОРТИРУЮЩАЯСЯ МИНА-ГЛАЙДЕР И СПОСОБ ЕЕ ПОСТАНОВКИ | 2016 |
|
RU2668021C2 |
| МОДУЛЬНЫЙ МАНИПУЛЯЦИОННЫЙ РОБОТ, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ИСПОЛЬЗОВАНИЯ В ОБРАЗОВАТЕЛЬНЫХ ЦЕЛЯХ | 2023 |
|
RU2806952C1 |

Изобретение относится к области мобильной робототехники, а именно к подводным роботам. Предложен подводный реконфигурируемый модульный мобильный робот, который содержит ряд последовательно соединенных между собой модулей, включая тяговые модули, создающие тягу с помощью установленных на них тяговых устройств с регулируемыми силой и направлением тяги, приводные реконфигурирующие модули, а также служебные модули, содержащие бортовую аппаратуру и оборудование, обеспечивающие функционирование робота по назначению. Каждый модуль выполнен с заданной степенью плавучести и остойчивости, так чтобы робот в любой конфигурации в целом обладал прогнозируемой плавучестью, а также каждый модуль имеет на основаниях корпусов механические и электрический интерфейсы, позволяющие соединять модули в произвольном порядке. Изобретение обеспечивает управляемость движения робота в любой конфигурации, повышение энергоэффективности системы тяговых модулей, упрощение конструкции модулей, операций изготовления и сборки робота в различных последовательностях соединения модулей и архитектуры системы управления роботом. 4 з.п. ф-лы, 8 ил.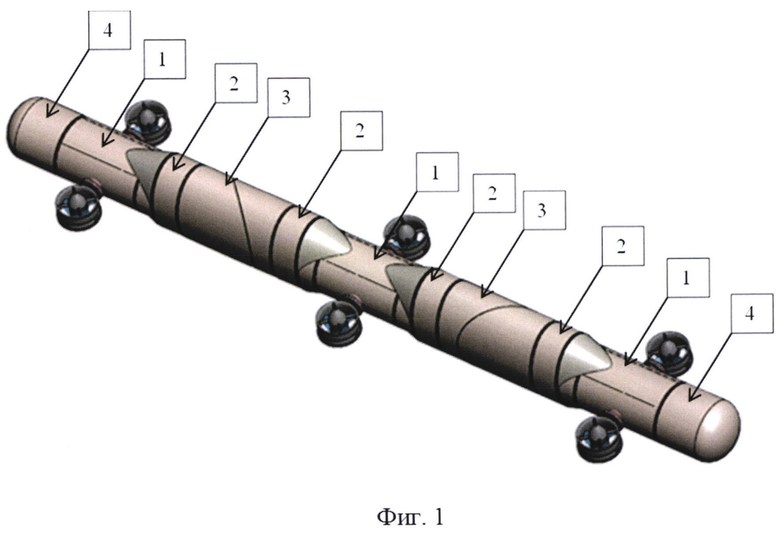
1. Подводный реконфигурируемый модульный робот, содержащий множество модулей, последовательно соединенных между собой, включающий тяговые модули, создающие тягу с помощью установленных на них тяговых устройств, приводные реконфигурирующие модули, а также служебные модули, содержащие бортовую аппаратуру и оборудование, обеспечивающие функционирование робота по назначению, отличающийся тем, что внешние корпуса тяговых модулей выполнены в форме прямых круговых цилиндров с установленными на них парами тяговых устройств с регулируемой силой тяги, причем каждое тяговое устройство установлено на выходном валу размещенного внутри корпуса тягового модуля полнооборотного сервопривода, а оси вращения поворотных сервоприводов перпендикулярны оси цилиндра тягового модуля, при этом направление усилия, создаваемого тяговым устройством, перпендикулярно оси вращения поворотных сервоприводов; реконфигурирующие продольные и/или поперечные модули, состоящие из двух частей, связаны приводным одностепенным шарниром вращения; продольные модули выполнены из двух частей с внешними корпусами в форме прямых цилиндров, в одной из которых установлен полнооборотный сервопривод с осью вращения, совпадающей с осью цилиндра, а поперечные модули выполнены из двух частей с внешними корпусами в форме прямых эллиптических цилиндров, усеченных проходящей под углом γ=arcsin(b/a) к их осям через большую ось образующего эллипса с большой а и малой b осями плоскостью, в одной из которых установлен полнооборотный сервопривод с осью вращения, проходящей перпендикулярно плоскости через центр образованного кругового сечения.
2. Подводный реконфигурируемый модульный робот по п. 1, отличающийся тем, что каждый жесткий узел модуля выполнен с заданной степенью плавучести и остойчивости, так чтобы робот в любой конфигурации в целом обладал прогнозируемой плавучестью.
3. Подводный реконфигурируемый модульный робот по п. 1, отличающийся тем, что каждый модуль имеет на основаниях корпусов механический и электрический интерфейсы, позволяющие соединять модули в произвольном порядке.
4. Подводный реконфигурируемый модульный робот по п. 1, отличающийся тем, что каждый модуль содержит управляющий контроллер, позволяющий обрабатывать сигналы от датчиков модуля и внешних устройств и формировать сигналы для управления приводами модуля.
5. Подводный реконфигурируемый модульный робот по п. 1, отличающийся тем, что контроллеры модулей подключены к общей шине данных и могут обмениваться адресованной информацией между собой.
| WO 2016120071 A1, 04.08.2016 | |||
| CN 105171722 A, 23.12.2015 | |||
| CN 105313110 A, 10.02.2016 | |||
| WO 2021170855 A1, 02.09.2021 | |||
| CN 103358305 A, 23.10.2013 | |||
| CN 201342916 Y, 11.11.2009 | |||
| Цельнометаллический настил проезжих частей мостов | 1959 |
|
SU130916A1 |
| CN 106346462 A, 25.01.2017. | |||

