СП
ьо -ч
Изобретение относится к электротехнике, а именно к управляемым электроприводам общепромышленного назначения на базе синхронных двигателей и непосредственных преобразователей частоты.
Цель изобретения - повьппение точности управления моментом синхронного двигателя.
На фиг. 1 представлена функциональ ная схема устройства для управления моментом синхронного двигателя; на фиг, 2 - формирователь обратной связи по моменту; на фиг, 3 - блок прямого преобразования координат; на фиг, 4 - временные диаграммы, поясняющие функционирование устройства.
Устройство для управления моментог синхронного дгзигателя 1 (фиг, 1) содержит непосредственные преобразователи 2 и 3 частоты (НПЧ), силовые выходы которых предназначены для подключения к соответствующим фазным обмоткам якоря синхронного двигателя 1 датчик 4 положения индуктора, датчики 5 и 6 фазных токов якоря, блок 7 задания момента, блоки 8 и 9 прямого и обратного преобразования коорддпшт соответственно. Опорные входы блоков 8 и 9 подключены к соответствующим выходам датчика 4 положения индуктора. Выходы датчиков 5 и 6 фазных токов якоря подключены к соответствующим информацисглным входам блока 9 обратного преобразования координат Выходы блока 8 прямого преобразовани координат подключены к управляющим входам соответствующих НПЧ 2 и 3.
В устройство для управления момен том синхронного двигателя введены формирователь 10 обратной связи по моменту, сумматоры 11 и 12, интеграторы 13 и 14с входами сброса, блок 15 деления, источник 16 смещения и элемент ШТИ 17, подключенный входами к выходам управления вентилями НПЧ 2 и 3.
Входы фор1чирователя 10 обратной связи но моменту подключены к соответствующим выходам блока 9 обратног преобразования координат, а выход - к одному из -входов сумматора 11, соединенного выходом с входом интегратора 13. Выход источника 16 смещения подключен к входу интегратора 14 Выходы интеграторов 13 и 14 подключены соответственно к входам делимого и делители блока 15 деления, соеди
0
0
5 Q
Q д
35
50
ненного выходом с одним из входов сумматора 12, Другие входы сумматоров 11 и 12 объединены между собой и подключены к выходу блока 7 задания момента. Выход сумматора 12 соединен с информационным входом блока 8 прямого преобразования координат, а выход элемента ИЛИ 17 подключен к входам сброса интеграторов 13 и 14,
Формирователь 10 обратной связи по моменту может быть выполнен с умножителем 18 (фиг, 2), масштабирующи- ;-1И усилителями 19 и 20 и сумматором 21, Первый и второй входы умножителя 18 образуют соответствующие входы фор1 шрователя 10, Второй вход умножителя 18 объединен с входом масштабирующего усилителя 20. Выход умножителя 18 подключен к входу масштабирующего усилителя 19. Выходы масштабирующих усилителей 19 и 20 подключены к входам сумматора 21, выход которого образует выход формирователя 10.
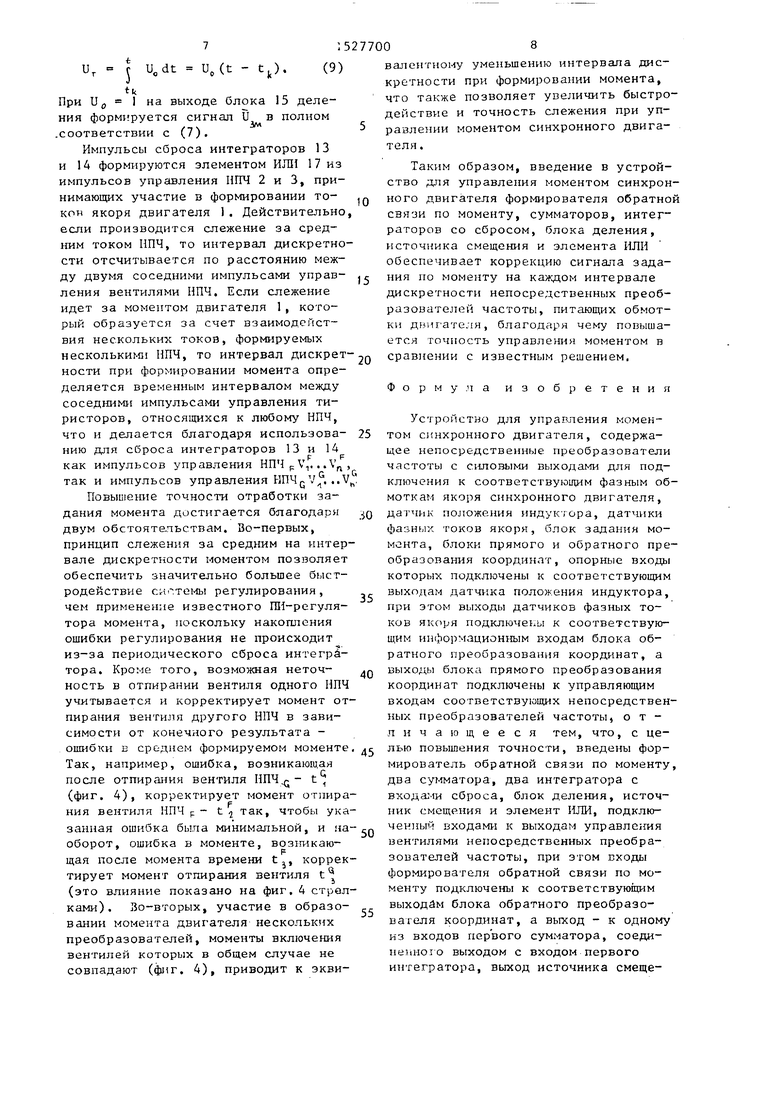
Блок 8 прямого преобразования координат может быть выполнен с масштабирующим усилителем 22 (фиг. 3), инвертором 23 и умножителями 24 и 25, Вход усилителя 22 образует информационный вход блока 8. Выход усилителя 22 подключен к первому входу умножителя 24 непосредственно, а к первому входу y ffloжитeля 25 через инвертор 23. Вторые входы умножителей 24 и 25 и их выходы образуют соответственно опорные входы и выходы блока 8 прямого преобразования координат.
Блок 7 задания момента и источник 16 смещения могут быть выполнены в виде источников постоянного напряжения. Блок 15 деления может быть выполнен с использованием микро.схемы аналогового перемножения 525ПС2 в обратной связи операционного усилителя ,
Датчики 5 и 6 фазных токов якоря можно реализовать в виде шунтов, включенных в соответствующие цепи обмоток двигателя 1 с применением оптронной развязки, В качестве датчика 4 положения индуктора может быть использован вращающийся трансформатор .
НПЧ 2 и 3 могут быть выполнены по трехфазной мойтовой схеме с многоканальной системой управления, построенной по вертикальному принципу, %
состав НПЧ 2 и 3 входят системы регулирования тока.
Устройство для управления моментом синхронного двигателя работает следующим образом.
Сигнал Ujf, с выхода блока 7 задания момента при частотно-токовом управлении определяет поперечную составляющую (по оси q) вектора тока синхронного двигателя 1, а продольная составляющая (по оси d) при этом равна нулю. Задание для поперечной составляющей вектора тока определяется выражением
и
и.
1
«2 К , Vo
и
3«Л5
где К. - коэффициент пропорциональности;
V - потокосцепление индуктора двигателя 1 (выполненного, например, на постоянных магнитах);
- cигнaJ: на выходе сумматора 12.
Задания для токов в фазах F, G двигателя 1 , формируе1-1ые с помощью блока 8 преобразования координат, зписываются :
.(2)
sin у.
и
Ui,- - - 3, из
где -v-- угловое положение индуктора.
С помощью НПЧ 2 и 3, содержащих системы регулирования тока нагрузки, осуществляется отработка заданных по (2) фазных токов с достаточно высокой точностью по средним за интервал дискретности значениям.
Нз-за несоответствия по мгновенным значениям реальных токов якоря заданию кривая реального момента двигателя 1 даже при его постоянном задании будет пульсировать. Устранение этого недостатка и повышение точности управления моментом связано с введением цепи обратной связи по реальному моменту нагрузки.
Соответствующий сигнал обратной связи получают на выходе формирователя 10 по сигналам продольной и поперечной составляющих вектора тока 1 ,г ч
и
ос 1
и соответственно, ос;
получен35
40
где U3(t) - ошибка в отработке среднего момента:
U3«(t)
k - коэффициент пропорциональности.
t-1
U3.(t) 45
50
- U,e«(t)dt.
Мгновенное значение ошибки по моменту вычисляется сумматором 11 и поступает на интегратор 13 со сбросом, момент начала интегрирования которого t определяется моментом поступления импульса сброса S;. Выходной сигнал интегратора 12, равный t
, U(t) ic S Uj,(t)-U, (t)dt, (8)
Ц
поступает на вход делимого блока 15 деления, на вход делителя которого поступает сигнал U с выхода интегных с помощью блока обратного преоб- ратора 14 со сбросом. Поскольку в разования координат (фиг. 3) по выра- интеграторе 14 интегрируется постоян- жениям
d Q f . UDC; Uoci COS-v- Uoci- Sin-v, ,-, ,,4IT G . It F VJ/
НЫЙ сигнал смещения U, СЯ теми же импульсами 3
и сбрасывает- что и ини,, -U,,-siny+ и:,,-cos у.
тегратор 13, то
у
10
15
20
где и . , сигналы на выходах датчиков 5 и 6 фазных токов якорп.
На выходе формирователя 10 (фиг.2) получают сигнал пропорциональный реальному моменту М двигателя:
Kjie;-4a -4)4;. (4)
где К - коэффициент пропорциональности;
1, i - токи по осям d, q; Lj, L - индуктивности по осям d, q. Управление по мгновенным значениям момента М не имеет смысла, поскольку НПЧ обеспечивает дискретный характер его отработки.
В устройстве обеспечивается слежение за величиной среднего за интервал дискретности момента двигателя 1.
При этом должно выполняться равенство
чГГ-;-1
1
i
ktt i.
(t)dt
(t)dt.
(5)
где t,, t начало и конец k-ro интервала дискретности.
2QРезультирующий сигнал задания момента должен формироваться в виде
5
0
U3«(t) изм(0 из„(с) k, (6)
где U3(t) - ошибка в отработке среднего момента:
U3«(t)
k - коэффициент пропорциональности.
t-1
U3.(t) 5
0
- U,e«(t)dt.
Мгновенное значение ошибки по моменту вычисляется сумматором 11 и поступает на интегратор 13 со сбросом, момент начала интегрирования которого t определяется моментом поступления импульса сброса S;. Выходной сигнал интегратора 12, равный t
, U(t) ic S Uj,(t)-U, (t)dt, (8)
Ц
поступает на вход делимого блока 15 деления, на вход делителя которого поступает сигнал U с выхода интегратора 14 со сбросом. Поскольку в интеграторе 14 интегрируется постоян-
ратора 14 со сбросом. Поскольку в интеграторе 14 интегрируется постоян-
НЫЙ сигнал смещения U, СЯ теми же импульсами 3
и сбрасывает- что и интегратор 13, то
и.
s
tk
п dt
u,(t - t.).
(9)
При Uo 1 на выходе блока 15 деления формируется сигнал U в полном .соответствии с (7).
Импульсы сброса интеграторов 13 и 1А формируются элементом ИЛИ 17 из импульсов управления ИГГЧ 2 и 3, принимающих участие в формировании то- кои якоря двигателя 1. Действительно, если производится слежение за средним током НПЧ, то интервал дискретности отсчитывается по расстоянию между двумя соседними импульсами управ- ления вентилями НПЧ, Если слежение идет за моментом двигателя 1, который образуется за счет взаимодействия нескольких токов, формируемых несколькими НПЧ, то интервал дискретности при формировании момента определяется временным интервалом между соседними импульсами управления тиристоров, относящихся к любому НПЧ, что и делается благодаря использова- нию для сброса интеграторов 13 и 14 как импульсов управления НПЧрХ ,. .. „, так и импульсов управления . .,V
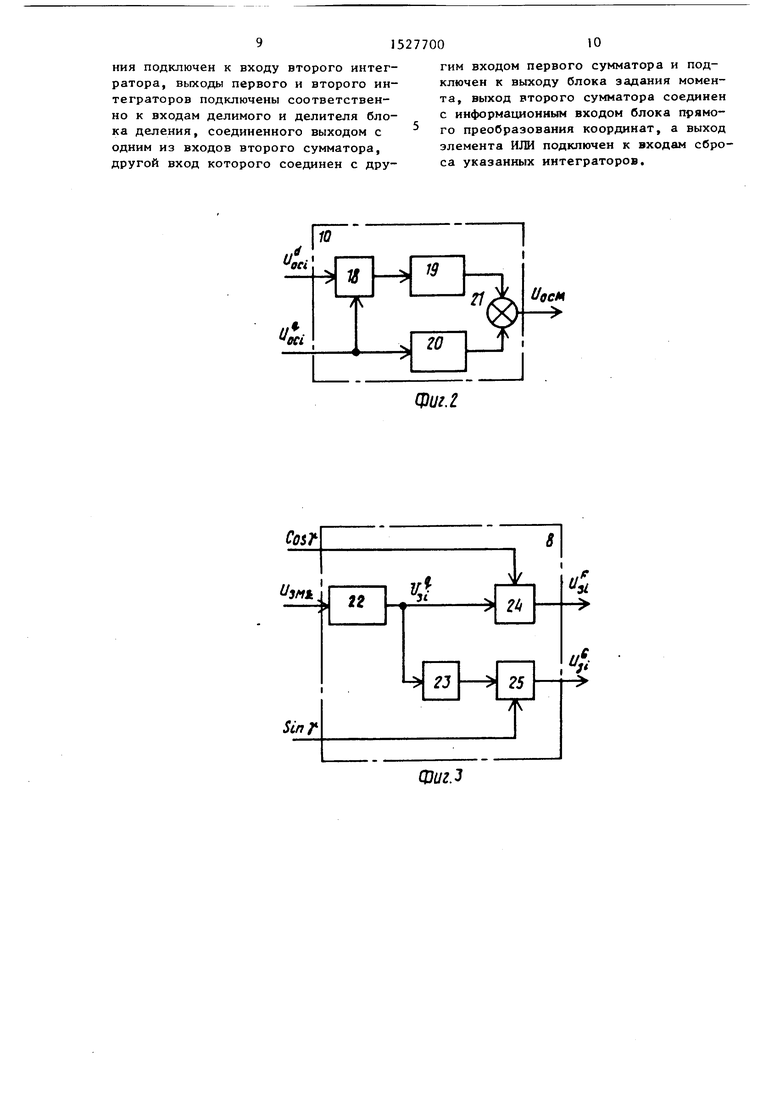
Повышение точности отработки задания момента достигается благодаря двум обстоятапьствам. Во-первых, принцип слежения за средним на интервале дискретности моментом позволяет обеспечить значительно большее быстродействие cHCTet-ib регулирования , чем применение известного Ш1-регуля- тора момента, поскольку накопления ошибки регулирования не происходит из-за периодического сброса интегр - тора. Кроме того, возможная неточ- ность в отпирании вентиля одного НПЧ учитывается и корректирует момент отпирания вентиля другого НПЧ в зависимости от конечного результата - ошибки в среднем формируемом моменте Так, например, ошибка, возникающая после отпирания вентиля Hn4,Q - t (фиг. 4), корректирует момент отпирания вентиля НПЧ р - t /, так, чтобы указанная ошибка была минимальной, и -чаоборот, ошибка в моменте, возникающая после момента времени t, корректирует момент отпирания вентиля t (это влияние показано на фиг, 4 стрелками). Во-вторых, участие в образо- вании момента двигателя нескольких преобразователей, моменты включения вентилей которых в общем случае не совпадают (фиг, 4), приводит к экви
Q Q п -
5
вапентному уменьшению интервала дискретности при формировании момента, что также позволяет увеличить быстродействие и точность слежения при управлении моментом синхронного двигателя ,
Таким образом, введение в устройство для управления моментом синхронного двигателя формирователя обратной связи по моменту, сумматоров, интег раторов со сбросом, блока деления, источника смещения и элемента ИЛИ обеспечивает коррекцию сигнала задания по моменту на каждом интервале дискретности непосредственных преобразователей частоты, питающих обмотки двигателя, благодаря чему повышается точность управления моментом в сравнении с известным решением,
Формула изобретения
Устройство для управления моментом синхронного двигателя, содержащее непосредственные преобразователи частоты с силовыми выходами для подключения к соответствующим фазным обмоткам якоря синхронного двигателя, датчик положения индуктора, датчики фазных токов якоря, блок задания момента, блоки прямого и обратного преобразования координат, опорные входы которых подключены к соответствующим выходам датчика положения индуктора, при этом выходы датчиков фазных токов якоря подключены к соответствующим информационным входам блока обратного преобразования координат, а выходы блока прямого преобразования координат подключены к управляющим входам соответствующих непосредственных преобразователей частоты, отличающееся тем, что, с целью повышения точности, введены формирователь обратной связи по моменту, два сумматора, два интегратора с входа:-1и сброса, блок деления, источник смещения и элемент ИЛИ, подключенный входами к выходам управлС1шя вентилями непосредственных преобразователей частоты, при этом входы формирователя обратной связи по моменту подключены к соответствующим выходим блока обратного преобразователя координат, а выход - к одному из входов первого сумматора, соеди- пеипого выходом с входом первого интегратора, выход источника смещения подключен к входу второго интегратора, выходы первого и второго интеграторов подключены соответственно к входам делимого и делителя блока деления, соединенного выходом с одним из входов второго сумматора, другой вход которого соединен с другим входом первого сумматора и подключен к выходу блока задания момента, выход второго сумматора соединен с информационным входом блока прямого преобразования координат, а выход элемента ИЛИ подключен к входам сброса указанных интеграторов.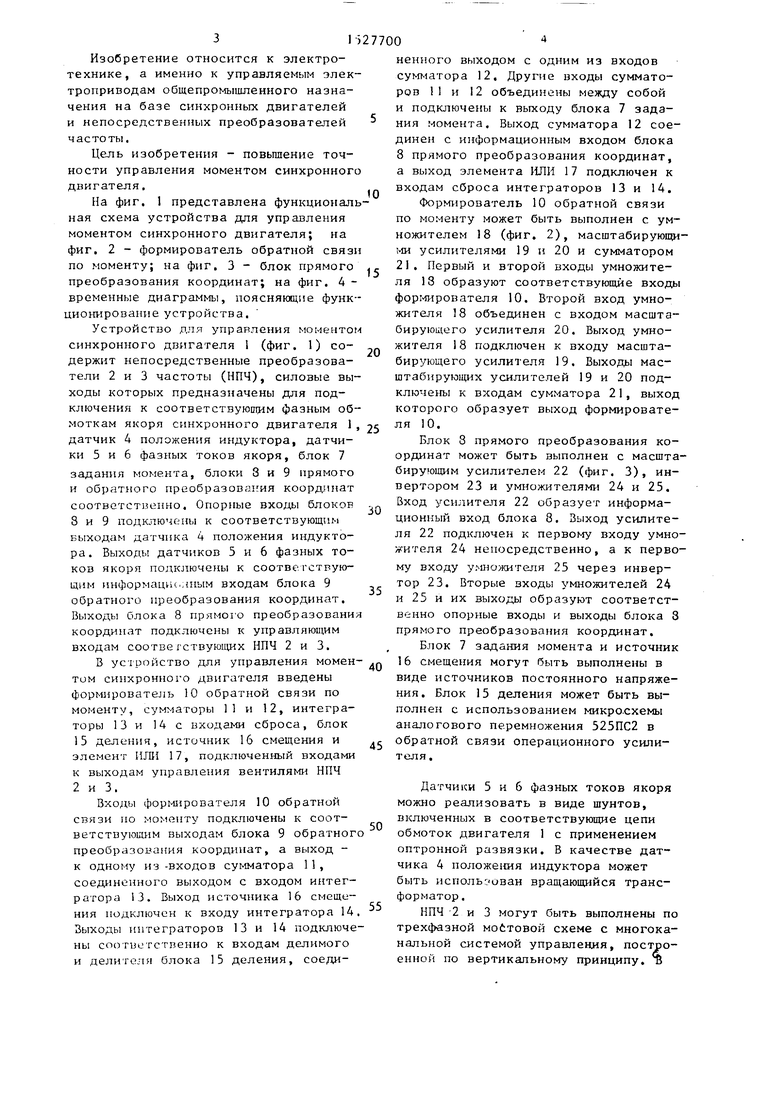

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования тока нагрузки непосредственного преобразователя частоты с естественной коммутацией | 1987 |
|
SU1446681A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором и устройство для его осуществления | 1987 |
|
SU1515323A1 |
| Способ управления непосредственным преобразователем частоты с естественной коммутацией | 1988 |
|
SU1617568A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Электропривод | 1987 |
|
SU1439729A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Способ управления непосредственным преобразователем частоты | 1987 |
|
SU1513588A1 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Способ управления многофазным инвертором и устройство для его осуществления | 1984 |
|
SU1458951A1 |
Изобретение относится к электротехнике, а именно к управляемым электроприводам на базе синхронных двигателей и непосредственных преобразователей частоты. Целью изобретения является повышение точности управления моментом синхронного двигателя. Цель достигается введением формирователя 10 обратной связи по моменту, сумматоров 11, 12, интеграторов 13, 14 с входами сброса, блока 15 деления, источника 16 смещения и элемента ИЛИ 17. При этом обеспечивается коррекция сигнала задания по моменту на каждом интервале дискретности непосредственных преобразователей частоты, питающих обмотки двигателя, благодаря чему повышается точность управления моментом. 4 ил.
Фиг.1
Фиг.з
Фиг.
| Бродовский В.Н., Иванов E.G | |||
| Приводы с частотно-токовым управлением | |||
| - М.: Энергия, 1974 | |||
| Слежановский О.В | |||
| и др | |||
| Система подчиненного регулирования электроприводов переменного тока с вентильными преобразователями | |||
| - М.: Энерго- атомиздат, I983, с | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
