Изобретение относится к области радиотехники, а именно к пассивным системам радиоконтроля, и может быть использовано в системах контроля собственного местоположения объекта навигации в качестве альтернативного способа определения координат, в частности, в условиях нарушения работы или выходе из строя приемника сигналов глобальных навигационных спутниковых систем (ГЛОНАСС, GPS и др.).
Известны разностно-дальномерный способ и устройство определения местоположения мобильных объектов (аналог) [Бакулев П.Α., Сосновский А.А. Радиолокационные и радионавигационные системы. - М: Радио и связь, 1994, с. 211-214]. Способ, заключающийся в поочередном излучении сетью опорных навигационных пунктов, расположенных в точках пространства с известными координатами, когерентных гармонических сигналов, их приеме на мобильном объекте, принятых от каждого опорного объекта и вычислении по ним координат мобильного объекта. Устройство, содержащее последовательно соединенные антенную систему, приемник сигналов радиоизлучающих объектов с известными координатами, блок определения разности времени прихода сигналов радиоизлучающих объектов, вычислитель декартовых координат объекта навигации.
Недостатком способа и устройства является необходимость использования высокоточной шкалы единого времени на объекте навигации, точная синхронизация сигналов радиоизлучающих объектов, а также сложность реализации при больших расстояниях между опорными радионавигационными точками и объектом навигации.
Наиболее близким по технической сущности и достигаемому техническому результату является способ определения собственного местоположения судна на основе сигналов автоматической идентификационной системы и устройство для его осуществления (прототип) [патент RU 2685705 C1, МПК G01S 15/06, опубликовано 23.04.2019]. Способ заключается в определении азимутальных углов прихода сигналов от трех или более независимых радиоизлучающих объектов с известными координатами, в качестве которых могут быть использованы суда, буи или береговые станции, определение географических координат радиоизлучающих объектов путем декодирования и анализа информации, содержащийся в сигналах, принимаемых от них, и последующее вычисление собственного местоположения объекта на основе определенных координат радиоизлучающих объектов и азимутальных углов между ними применяемым в геодезии методом однократной или многократной обратной засечки. Устройство, содержащее N - канальную пеленгаторную антенную систему из антенных элементов с круговой диаграммой направленности, размещенных на расстоянии не менее λ/2 друг от друга, где λ - максимальная длина волны сигналов в диапазоне работы устройства, каждый антенный элемент которой по одноименным каналам последовательно соединен с блоками аналоговой обработки сигналов и аналого-цифрового преобразования сигналов, а также последовательно соединенные блок цифровой обработки, блок определения координат радиоизлучающих объектов и индикаторное устройство, кроме того n - выходов блока аналого-цифрового преобразования сигналов соединены с n - входами блока цифровой обработки, где n=2..Ν.
Недостатком способа и устройства прототипа является получение только географических координат объекта навигации: широты и долготы. Кроме того, для получения результата необходимым условием является наличие априорной информации об ориентации строительных осей пеленгаторной антенной системы в пространстве. Использование антенной системы с разносом антенных элементов не менее λ/2 друг от друга, где λ - максимальная длина волны сигналов в диапазоне работы устройства, приводит к существенным ошибкам определения собственного местоположения объекта навигации, обусловленным неоднозначной оценкой разности фаз между приемными каналами пеленгатора.
Техническим результатом данного изобретения является расширение координатного пространства области применения навигационной системы при повышении точности определения собственного местоположения объекта навигации за счет использования эквидистантной пеленгаторной антенной системы с расположением антенных элементов на расстоянии не более λ/2 друг от друга, где λ - минимальная длина волны сигналов в диапазоне работы устройства, обеспечивающей устранение фазовой неоднозначности при оценке углов прихода сигналов радиоизлучающих объектов.
Технический результат достигается тем, что в известном способе, заключающемся в приеме сигналов от независимых радиоизлучающих объектов с известными координатами с использованием N - канальной антенной системы, установленной на объекте навигации, определении азимутальных углов прихода сигналов, определении координат радиоизлучающих объектов путем декодирования и анализа информации, содержащийся в принятых сигналах, и определении собственного местоположения, согласно изобретению, дополнительно определяют в угломестной плоскости углы прихода сигналов от радиоизлучающих объектов с известными координатами, вычисляют углы между векторами направлений на радиоизлучающие объекты с известными координатами, и на основе определенных координат радиоизлучающих объектов и углов между векторами направлений на них вычисляют собственное местоположение объекта навигации в Земной системе координат.
Технический результат достигается тем, что в известном устройстве, содержащем N - канальную антенную систему, каждый антенный элемент которой по одноименным каналам последовательно соединен с блоками аналоговой обработки сигналов и аналого-цифрового преобразования сигналов, а также последовательно соединенные блок цифровой обработки, блок определения координат радиоизлучающих объектов и индикаторное устройство, при этом n - выходов блока аналого-цифрового преобразования сигналов соединены с n - входами блока цифровой обработки, где n=2..Ν, согласно изобретению, дополнительно введены последовательно соединенные блоки оценки углового расстояния и определения местоположения, выход которого соединен со вторым входом индикаторного устройства, второй выход блока цифровой обработки соединен с входом блока оценки углового расстояния, а второй выход блока определения координат радиоизлучающих объектов соединен с соответствующим входом блока определения местоположения, кроме того, пеленгаторная антенная система выполнена в виде эквидистантной антенной решетки, состоящей минимум из трех антенных элементов, размещенных на расстоянии не более λ/2 друг от друга, где λ - минимальная длина волны сигналов в диапазоне работы устройства.
Сущность способа изобретения заключается в том, что дополнительно определяют в угломестной плоскости углы прихода сигналов от радиоизлучающих объектов с известными координатами, вычисляют углы между векторами направлений на радиоизлучающие объекты с известными координатами, с использованием которых определяют собственное местоположение объекта навигации в пространстве в условиях полного отсутствия данных о параметрах пространственной ориентации пеленгаторной антенной системы.
Сущность устройства изобретения заключается в том, что дополнительно введены последовательно соединенные блоки оценки углового расстояния и определения местоположения, выход которого соединен со вторым входом индикаторного устройства, второй выход блока цифровой обработки соединен с входом блока оценки углового расстояния, а второй выход блока определения координат радиоизлучающих объектов соединен с соответствующим входом блока определения местоположения, кроме того, повышена точность определения собственного местоположения объекта навигации за счет использования эквидистантной пеленгаторной антенной системы с расположением антенных элементов на расстоянии не более λ/2 друг от друга, где λ - минимальная длина волны сигналов в диапазоне работы устройства, обеспечивающей устранение фазовой неоднозначности при оценке углов прихода сигналов радиоизлучающих объектов.
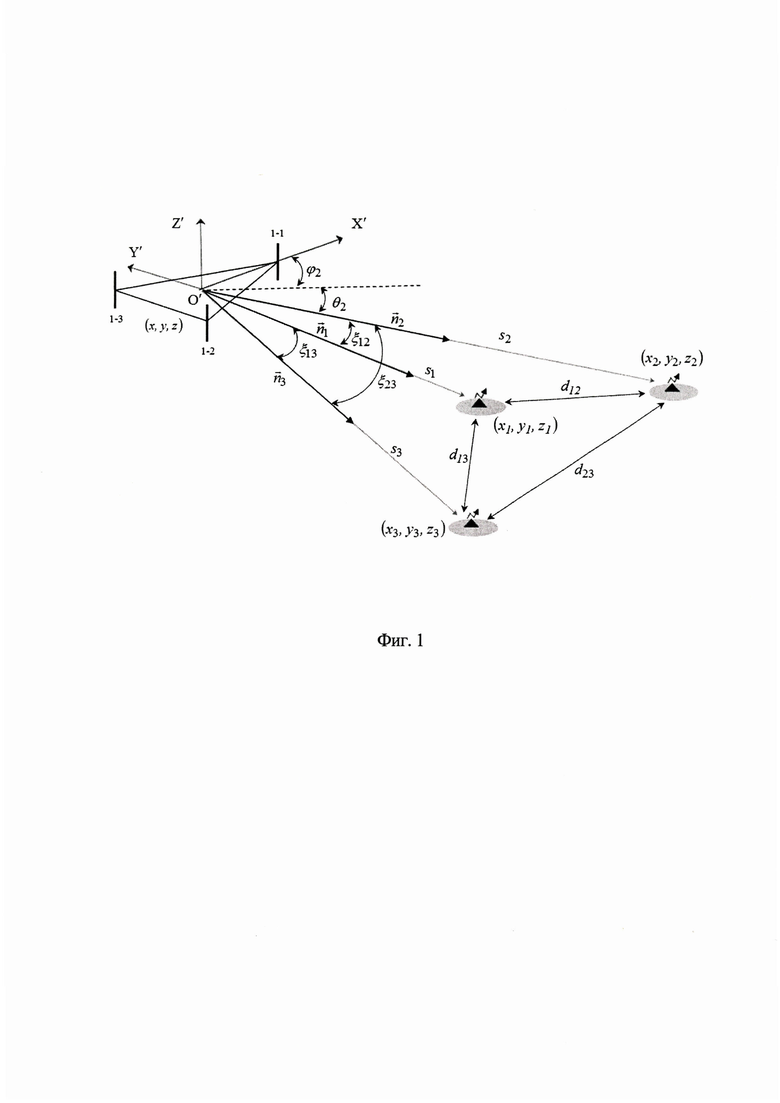
Сущность заявленного изобретения поясняется на фиг. 1, где на примере использования 3-канального фазового пеленгатора обозначены:
Χ',Υ',Ζ' - локальная связанная система координат, имеющая строгую привязку к строительным осям объекта навигации;
О' - фазовый центр пеленгаторной антенной системы, установленной на объекте навигации с неизвестными координатами (х, у, z); 1-1, 1-2, 1-3 - антенные элементы антенной системы;
(xi, yi, zi), где i = 1…3 - известные координаты i-го радиоизлучающего объекта;
dij, где i = 1…3, j = 1…3, i ≠ j - известные расстояния между i-м и j-м радиоизлучающими объектами;
Si, где i = 1…3 - дальность от объекта навигации до i-го радиоизлучающих объектов с известными координатами (наклонная дальность);
 где i=1…3 - вектор направления на i-й радиоизлучающий объект в связанной локальной системе координат;
где i=1…3 - вектор направления на i-й радиоизлучающий объект в связанной локальной системе координат;
ϕi, где i = 1…3 - азимут направления на i-й радиоизлучающий объект в связанной локальной системе координат;
θi, где i = 1…3 - угол места направления на i-й радиоизлучающий объект в связанной локальной системе координат;
ξij, где i = 1…3, j = 1…3, i ≠ j - угол между соответствующими векторами направлений на i-й и j-й радиоизлучающие объекты.
С использованием фазового пеленгатора с антенной системой 1, имеющей жесткую привязку к строительным осям объекта навигации (Χ', Υ', Ζ'), измеряют углы прихода сигналов радиоизлучающих объектов в азимутальной (ϕ) и угломестной (θ) плоскостях в связанной локальной системе координат. Локальная система координат относительно антенных элементов (1-1, 1-2, 1-3) является левосторонней, начало отсчета которой совпадает с фазовым центром пеленгаторной антенной системы, ось абсцисс (О'Х') проходит через антенный элемент 1-1, нумерация антенных элементов осуществляется по часовой стрелке, ось аппликат (Ο'Ζ') направлена вверх, все фазовые центры антенных элементов лежат в плоскости Χ'О'Y'. При известных угловых координатах (ϕ, θ) направляющий единичный вектор в локальной системе координат на радиоизлучающий объект определяют следующими коэффициентами [Беклемишев Д.В. Курс аналитической геометрии и линейной алгебры: Учеб. для вузов. - 10-е изд., испр. - М.: ФИЗМАТЛИТ, 2005. - 304 с., С. 17-18.]:

Угол ξij между векторами  направлений на радиоизлучающие объекты для ортонормированного базиса локальной системы координат может быть вычислен, например, с использованием следующего выражения [Беклемишев Д.В. Курс аналитической геометрии и линейной алгебры: Учеб. для вузов. - 10-е изд., испр. - М.: ФИЗМАТЛИТ, 2005. - 304 с., С. 24-26.]:
направлений на радиоизлучающие объекты для ортонормированного базиса локальной системы координат может быть вычислен, например, с использованием следующего выражения [Беклемишев Д.В. Курс аналитической геометрии и линейной алгебры: Учеб. для вузов. - 10-е изд., испр. - М.: ФИЗМАТЛИТ, 2005. - 304 с., С. 24-26.]:
В условиях неопределенности пространственной ориентации локальной системы координат относительно Земной, для оценки собственных координат используют навигационный метод на основе оценки наклонных дальностей Si до каждого i-го радиоизлучающего объекта путем решения системы трех уравнений, составленных с помощью теоремы косинусов [http://dx.doi.org/10.1155/2015/147397]. На заключительном этапе местоположение в пространстве объекта навигации (х, у, z) определяют как точку
пересечения поверхностей положения, представляющих собой сферы с центрами в местах расположения радиоизлучающих объектов с известными координатами (x1, y1, z1)(х2, у2, z2) и (х3, у3, z3).
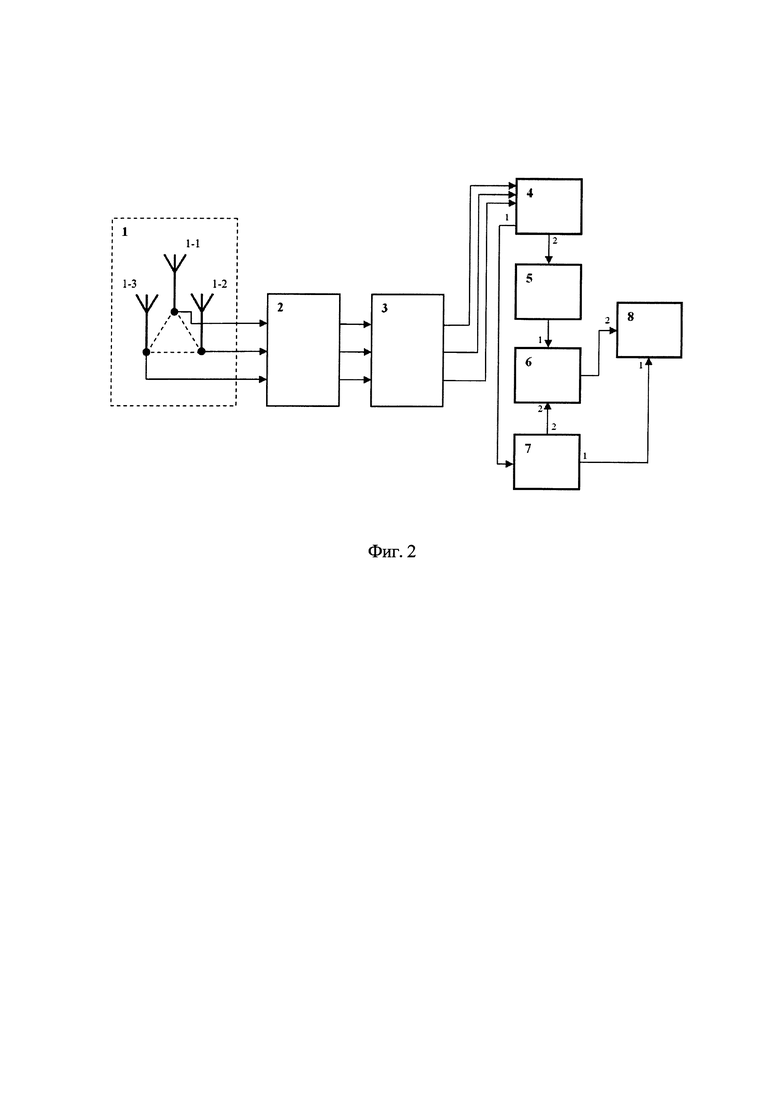
На фиг. 2 приведен вариант структурной схемы устройства определения собственного местоположения объекта в пространстве с 3-канальным фазовым пеленгатором, где обозначены:
1 - антенная система, включающая три антенных элемента 1-1, 1-2 и 1-3;
2 - блок аналоговой обработки сигналов;
3 - блок аналого-цифрового преобразования сигналов;
4 - блок цифровой обработки;
5 - блок оценки углового расстояния;
6 - блок определения местоположения;
7 - блок определения координат радиоизлучающих объектов;
8 - индикаторное устройство.
Назначения элементов, представленных на фиг. 2 понятны из их названия.
Блок оценки углового расстояния 5 предназначен для вычисления углов между векторами направлений на радиоизлучающие объекты на основе данных об угловых параметрах векторов направлений в азимутальной и угломестной плоскостях, поступающих с блока цифровой обработки 4.
Блок оценки углового расстояния 5 может быть выполнен на базе AVR микроконтроллера [https://en.wikipedia.org/wiki/AVR_microcontrollers].
Блок определения местоположения 6 предназначен для вычисления собственного местоположения объекта навигации на основе определенных координат радиоизлучающих объектов, поступающих с блока определения координат радиоизлучающих объектов 7, и значений углов между векторами направлений на них, поступающих с блока оценки углового расстояния 5.
Блок определения местоположения 6 может быть выполнен на базе AVR микроконтроллера [https://en.wikipedia.org/wiki/AVR_microcontrollers].
Заявляемое устройство, реализующее способ определения собственного местоположения объекта в пространстве, работает аналогично прототипу с некоторыми отличиями, которые заключаются в следующем.
Сигнал со второго выхода блока цифровой обработки 4, содержащий данные об углах направлений на три радиоизлучающих объекта в азимутальной и угломестной плоскостях в локальной связанной системе координат, поступает на вход блока оценки углового расстояния 5. Сигналы с первого выхода блока цифровой обработки 4 поступают на вход блока определения координат радиоизлучающих объектов 7, в котором обеспечивается декодирование и определение координат радиоизлучающих объектов. Далее с выхода блока определения координат радиоизлучающих объектов 7 сигнал поступает на второй вход блока определения местоположения 6. Кроме того, с выхода блока оценки углового расстояния 5 на первый вход блока определения местоположения 6 поступает сигнал, содержащий результаты вычислений - значения углов между векторами направлений на радиоизлучающие объекты в связанной локальной системе координат. С выхода блока определения местоположения 6 сигнал, содержащий информацию о координатах собственного местоположения объекта навигации в пространстве, подается на второй вход индикаторного устройства 8 для отображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СОБСТВЕННОГО МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2023 |
|
RU2827103C1 |
| Способ определения собственного местоположения объекта в пространстве | 2023 |
|
RU2815168C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ НА КОПТЕРЕ | 2024 |
|
RU2841365C1 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ РАДИОИЗЛУЧАЮЩИХ ОБЪЕКТОВ | 2019 |
|
RU2716145C1 |
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2524401C1 |
| Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа | 2016 |
|
RU2617830C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557250C1 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2529483C1 |
Использование: изобретение относится к области радиотехники, а именно к пассивным системам радиоконтроля, и может быть использовано в системах контроля собственного местоположения объекта навигации в качестве альтернативного способа определения координат, в частности, в условиях нарушения работы или выхода из строя приемника сигналов глобальных навигационных спутниковых систем (ГЛОНАСС, GPS и др.). Сущность: определение собственного местоположения объекта навигации в пространстве производится путем детектирования в азимутальной и угломестной плоскостях направлений прихода сигналов минимум от трех радиоизлучающих объектов, вычисления углов между векторами направлений на них, выделения из принятых сигналов информации о координатах этих радиоизлучающих объектов и последующего решения задачи определения собственного местоположения, для чего используется радиотехническое устройство, позволяющее определять необходимые характеристики сигналов радиоизлучающих объектов и реализующее алгоритмы вычисления собственного местоположения объекта навигации. Технический результат: расширение координатного пространства области применения навигационной системы при повышении точности определения собственного местоположения объекта навигации за счет использования эквидистантной пеленгаторной антенной системы с расположением антенных элементов на расстоянии не более λ/2 друг от друга, где λ - минимальная длина волны сигналов в диапазоне работы устройства, обеспечивающей устранение фазовой неоднозначности при оценке углов прихода сигналов радиоизлучающих объектов. 2 н.п. ф-лы, 2 ил.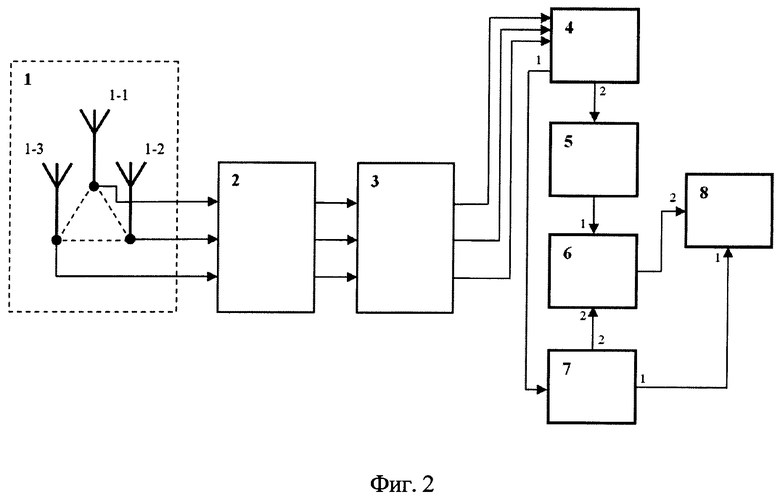
1. Способ определения собственного местоположения объекта в пространстве, заключающийся в приеме сигналов от независимых радиоизлучающих объектов с известными координатами с использованием N - канальной антенной системы, установленной на объекте навигации, определении азимутальных углов прихода сигналов, определении координат радиоизлучающих объектов путем декодирования и анализа информации, содержащейся в принятых сигналах, и определении собственного местоположения, отличающийся тем, что дополнительно определяют в угломестной плоскости углы прихода сигналов от радиоизлучающих объектов с известными координатами, вычисляют углы между векторами направлений на радиоизлучающие объекты с известными координатами, с использованием которых вычисляют собственное местоположение объекта навигации.
2. Устройство определения собственного местоположения объекта в пространстве, содержащее N - канальную антенную систему, каждый антенный элемент которой по одноименным каналам последовательно соединен с блоками аналоговой обработки сигналов и аналого-цифрового преобразования сигналов, а также последовательно соединенные блок цифровой обработки, блок определения координат радиоизлучающих объектов и индикаторное устройство, кроме того, n - выходов блока аналого-цифрового преобразования сигналов соединены с n - входами блока цифровой обработки, где n=2..Ν, отличающееся тем, что дополнительно введены последовательно соединенные блоки оценки углового расстояния и определения местоположения, выход которого соединен со вторым входом индикаторного устройства, второй выход блока цифровой обработки соединен с входом блока оценки углового расстояния, а второй выход блока определения координат радиоизлучающих объектов соединен с соответствующим входом блока определения местоположения, кроме того, антенная система выполнена в виде эквидистантной антенной решетки, состоящей минимум из трех антенных элементов, размещенных на расстоянии не более λ/2 друг от друга, где λ - минимальная длина волны сигналов в диапазоне работы устройства.
| Способ определения собственного местоположения судна на основе сигналов автоматической идентификационной системы и устройство для его осуществления | 2018 |
|
RU2685705C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516704C2 |
| СПОСОБ ДИНАМИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНЫХ ОБЪЕКТОВ | 2016 |
|
RU2624790C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ СУДНА И ХАРАКТЕРИСТИК ЕГО ДВИЖЕНИЯ | 2013 |
|
RU2546846C2 |
| CN 101644759 B, 15.08.2012. | |||

