Изобретение относится к области машиностроения, в частности, к подшипникам скольжения и может быть использовано в узлах механизмов машин, роторных машинах, к которым предъявляются повышенные требования по надежности опорного узла.
Известен мехатронный подшипник скольжения, содержащий корпус и размещенную в нем втулку, выполненную из антифрикционного материала, во втулке закреплен индикатор износа, выполненный в виде незамкнутого кольца, изолированная часть которого заглублена во втулке на величину, равную начальному износу, индикатор износа состоит из трех пластин, заключенных в изоляцию, и имеющих по два электрических контакта каждая, причем первая группа контактов, через соответствующий ей разъем, соединена с одним полюсом источника электрического питания, а вторая группа контактов, через последовательно установленный соответствующий ей разъем, преобразователь сигнала и дисплей, подключена к другому полюсу источника электрического питания (Патент RU №2750542, МПК F16C 17/02, F16C 17/24, F16C 33/04, G01M 13/04, опубликовано 29.06.2021 г.).
Недостатком известного мехатронного подшипника скольжения является ограниченная информативность эксплуатанта о состоянии всего узла, в частности, о процессах, происходящих внутри него.
Техническая задача, которую решает данное изобретение, заключается в увеличении информативности эксплуатанта о состоянии подшипникового узла скольжения, в частности, о процессах, происходящих внутри него, что позволит спрогнозировать ресурс работы узла или агрегата, в состав которого входит данная опора скольжения.
Поставленная задача достигается тем, что в интеллектуальной опоре скольжения, содержащей корпус и размещенный в нем подшипник скольжения, в виде втулки, выполненный из антифрикционного материала, в подшипнике скольжения закреплен, по меньшей мере, один индикатор износа, изолированная часть которого заглублена в подшипник скольжения на величину, равную начальному износу, в подшипнике скольжения установлен датчик температуры рабочей поверхности, в корпусе установлены датчик температуры подшипника скольжения, датчик температуры смазочного материала, датчик давления и датчик вибрации, между корпусом подшипника и подшипником скольжения установлен датчик положения, внутри подшипника скольжения размещен вал, соединенный через муфту с движителем, пространство внутри корпуса и зазоры между подшипником скольжения и валом заполнены смазочным материалом, на корпусе подшипника скольжения закреплен датчик частоты вращения, все датчики и движитель связаны с электронным блоком сбора, обработки и управления сигналами, который снабжен блоком с программным обеспечением на предварительно обученной нейронной сети, связанным прямой и обратной связью с устройством ввода и отображения информации.
Технический результат заключается в увеличении информативности состояния подшипникового узла скольжения в течение всего срока эксплуатации, что позволит спрогнозировать ресурс работы узла или агрегата, в состав, которого входит данная опора скольжения.
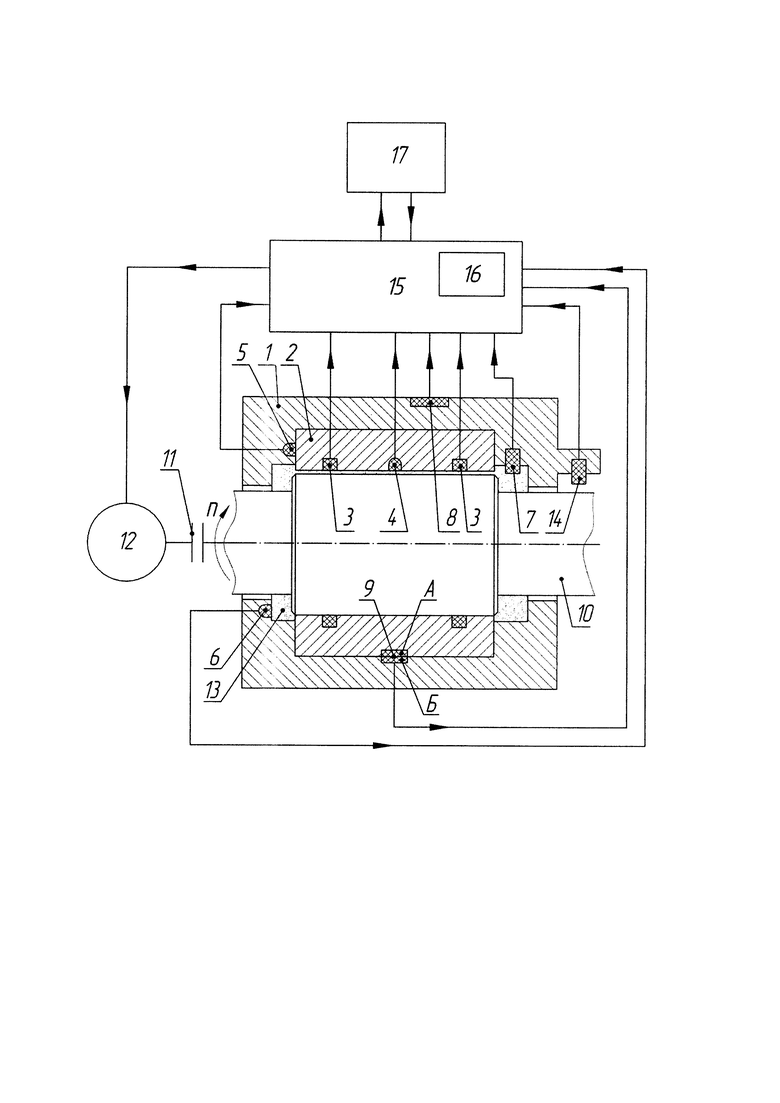
Сущность изобретения поясняется рисунком, на котором изображена схема интеллектуальной опоры скольжения.
Интеллектуальная опора скольжения состоит из корпуса 1 и подшипника 2 скольжения, представляющего собой втулку, выполненную из антифрикционного материала, например, бронзы, в которой закреплен индикатор 3 износа (их может быть несколько), причем его изолированная часть заглублена в слое антифрикционного материала подшипника 2 скольжения на величину, равную начальному износу. В подшипнике 2 скольжения установлен датчик 4 температуры рабочей поверхности. В корпусе 1 установлены: датчик 5 температуры подшипника 2 скольжения, датчик 6 температуры смазочного материала, датчик 7 давления и датчик 8 вибрации. Между корпусом 1 и подшипником 2 скольжения установлен датчик 9 положения, который состоит из двух частей А и Б, одна из которых А закреплена на подшипнике 2 скольжения, а другая Б закреплена на корпусе 1. Внутри подшипника 2 скольжения установлен вал 10, который соединен через муфту 11 с движителем 12, например, электродвигателем. Пространство внутри корпуса 1, а также зазоры между подшипником 2 скольжения и валом 10 заполнены смазочным материалом 13. На корпусе 1 закреплен датчик 14 частоты вращения. Индикатор 3 износа, датчик 4 температуры рабочей поверхности, датчик 5 температуры подшипника 2 скольжения, датчик 6 температуры смазочного материала, датчик 7 давления и датчик 8 вибрации, датчик 9 положения, датчик 14 частоты вращения связаны с электронным блоком 15 сбора, обработки и управления сигналами. В блоке 15 сбора, обработки и управления сигналами установлен блок 16 с программным обеспечением, основанным на предварительно обученной нейронной сети. Блок 15 сбора, обработки и управления сигналами связан прямой и обратной связью с устройством 17 ввода и отображения информации. Движитель 12 связан с блоком 15 сбора, обработки и управления сигналами.
Работа интеллектуальной опоры скольжения осуществляется следующим образом.
Подшипник 2 скольжения установлена в корпусе 1, который заполнен смазочным материалом 13. Правильность установки подшипника 2 скольжения в корпусе 1 определяет датчик 9 положения. При правильной установке одна часть А датчика 9 положения, закрепленного на подшипнике 2 скольжения должна совпасть с частью Б датчика 9 положения, закрепленного на корпусе 1. При совпадении частей А и Б датчика 9 положения на электронный блок 15 сбора, обработки и управления сигналами подается сигнал, разрешающий запуск движителя 12. Внутри подшипника 2 скольжения приводят во вращение вал 10 с частотой вращения п через муфту 11 с помощью движителя 12. Управление движителем 12 осуществляют с помощью электронного блока 15 сбора, обработки и управления сигналами. При вращении вала 10 в смазочном материале 13 в подшипнике 2 скольжения возникают различные процессы, которые регистрируются индикатором 3 износа, датчиком 4 температуры рабочей поверхности, датчиком 5 температуры подшипника 2 скольжения, датчиком 6 температуры смазочного материала, датчиком 7 давления, датчиком 8 вибрации, датчиком 9 положения, датчиком 14 частоты вращения, и полученные от них значения передаются в электронный блок 15 сбора, обработки и управления сигналами, где полученные данные обрабатываются с помощью блока 16 программного обеспечения, основанного на предварительно обученной нейронной сети. Подшипник скольжения в процессе эксплуатации может подвергаться различным воздействиям как внешним, так и внутренним. В таком случае группа датчиков или один из датчиков 3, 4, 5, 6, 7, 8, 9, 14, подключенных к электронному блоку 15 сбора, обработки и управления сигналами, может передавать предельные значения. Если эти значения превышают допустимые, которые заложены с помощью программного кода через устройство 17 ввода и отображения информации в программное обеспечение блока 16 на основе предварительно обученной нейронной сети, то блок 15 сбора, обработки и управления сигналами передает сигнал на устройство 17 ввода и отображения информации о неисправности и останавливает движитель 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНЫЙ ПОДШИПНИКОВЫЙ УЗЕЛ С ИНТЕЛЛЕКТУАЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2821860C1 |
| ЭКСПЕРИМЕНТАЛЬНАЯ УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНО-ОПОРНЫХ УЗЛОВ | 2020 |
|
RU2749412C1 |
| СПОСОБ УПРАВЛЕНИЯ РАДИАЛЬНО-ОСЕВЫМИ ДВИЖЕНИЯМИ РОТОРА | 2022 |
|
RU2792850C1 |
| СИСТЕМА ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ ПОДШИПНИКОВЫХ УЗЛОВ | 2021 |
|
RU2783172C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИЗНОСА ПОДШИПНИКА СКОЛЬЖЕНИЯ | 2022 |
|
RU2783716C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ С АКТИВНЫМ УПРАВЛЕНИЕМ | 2019 |
|
RU2734066C1 |
| МЕХАТРОННЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ | 2020 |
|
RU2750542C1 |
| СПОСОБ ВИБРАЦИОННОЙ ДИАГНОСТИКИ РОТОРНЫХ СИСТЕМ | 2020 |
|
RU2753151C1 |
| МЕХАТРОННАЯ УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ | 2018 |
|
RU2701744C1 |
| ТРИБОМЕХАТРОННЫЙ СТЕНД ДЛЯ ИССЛЕДОВАНИЯ АКТИВНЫХ РОТОРНЫХ ОПОР | 2022 |
|
RU2796705C1 |
Использование: изобретение относится к области машиностроения, в частности к подшипникам скольжения, и может быть использовано в узлах механизмов машин, роторных машинах, к которым предъявляются повышенные требования по надежности опорного узла. Сущность: в интеллектуальной опоре скольжения, содержащей корпус и размещенный в нем подшипник скольжения, в виде втулки, выполненный из антифрикционного материала, в подшипнике скольжения закреплен, по меньшей мере, один индикатор износа, изолированная часть которого заглублена в подшипник скольжения на величину, равную начальному износу, в подшипнике скольжения установлен датчик температуры рабочей поверхности, в корпусе установлены датчик температуры подшипника скольжения, датчик температуры смазочного материала, датчик давления и датчик вибрации, между корпусом подшипника и подшипником скольжения установлен датчик положения, внутри подшипника скольжения размещен вал, соединенный через муфту с движителем, пространство внутри корпуса и зазоры между подшипником скольжения и валом заполнены смазочным материалом, на корпусе подшипника скольжения закреплен датчик частоты вращения, все датчики и движитель связаны с электронным блоком сбора, обработки и управления сигналами, который снабжен блоком с программным обеспечением на предварительно обученной нейронной сети, связанным прямой и обратной связью с устройством ввода и отображения информации. Технический результат: увеличение информативности состояния подшипникового узла скольжения в течение всего срока эксплуатации, что позволит спрогнозировать ресурс работы узла или агрегата, в состав, которого входит данная опора скольжения. 1 ил.
Интеллектуальная опора скольжения, содержащая корпус и размещенный в нем подшипник скольжения, выполненный в виде втулки из антифрикционного материала, и закрепленный в подшипнике скольжения, по меньшей мере, один индикатор износа, изолированная часть которого заглублена в подшипник скольжения на величину, равную начальному износу, отличающаяся тем, что в подшипнике скольжения установлен датчик температуры рабочей поверхности, в корпусе установлены датчик температуры подшипника скольжения, датчик температуры смазочного материала, датчик давления и датчик вибрации, между корпусом подшипника и подшипником скольжения установлен датчик положения, внутри подшипника скольжения размещен вал, соединенный через муфту с движителем, пространство внутри корпуса и зазоры между подшипником скольжения и валом заполнены смазочным материалом, на корпусе подшипника скольжения закреплен датчик частоты вращения, все датчики и движитель связаны с электронным блоком сбора, обработки и управления сигналами, который снабжен блоком с программным обеспечением на предварительно обученной нейронной сети, связанным прямой и обратной связью с устройством ввода и отображения информации.
| УСТРОЙСТВО КОНТРОЛЯ ИЗНОСА ПОДШИПНИКА СКОЛЬЖЕНИЯ | 2022 |
|
RU2783716C1 |
| ПОДШИПНИК СКОЛЬЖЕНИЯ | 2020 |
|
RU2752741C1 |
| МЕХАТРОННЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ | 2020 |
|
RU2750542C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОДШИПНИКА СКОЛЬЖЕНИЯ С ВОЗМОЖНОСТЬЮ ДИАГНОСТИКИ ПРЕДЕЛЬНОГО ИЗНАШИВАНИЯ РАБОЧЕЙ ПОВЕРХНОСТИ | 2022 |
|
RU2783323C1 |
| CN 208951104 U, 07.06.2019. | |||

