Изобретение относится к области машиностроения, в частности к подшипникам скольжения, и может быть использовано в узлах механизмов и машин для обеспечения вращательного движения.
Известен мехатронный подшипник качения, содержащий внутреннее и наружное кольца, расположенные между ними тела качения, разделенные сепаратором, он содержит устройство перемещения внутреннего кольца, включающее планетарную передачу и электродвигатель, подключенный к блоку управления, сбора и обработки сигналов, который соединен прямой и обратной связью с датчиками температуры, вибрации, перемещения и усилия, встроенными в наружное кольцо (Патент РФ №2734174, МПК F16C 19/00, F16C 19/52, G01M 13/04, опубликовано 13.10.2020 Бюл. №29).
Недостатком известного подшипника является невозможность использования данного подшипника при большой частоте вращения вала.
Техническая задача, которую решает данное изобретение, заключается в увеличении ресурса работы конического подшипникаскольжения.
Техническая задача достигается тем, что в подшипнике скольжения, содержащем внутреннюю и наружную втулки, устройство перемещения внутренней втулки, блок сбора, обработки и управления сигналами, который соединен прямой и обратной связью с датчиками температуры, перемещения и давления, внутренняя поверхность внутренней втулки выполнена конусообразной, в наружной втулке выполнены каналы для подачи гидравлической жидкости в полость устройства перемещения внутренней втулки, выполненного в виде упругого гофрированного элемента, представляющего собой полую металлическую или резинометаллическую оболочку с возможностью расширения ее вдоль оси подшипника при гидравлическом воздействии, причем этот элемент одной стороной соединен с торцевой поверхностью внутренней втулкой, а другой - с торцевой внутренней поверхностью наружной втулки, каналы которой через напорную магистраль, включающую последовательно установленные гидравлические шланги, фильтр, насосную станцию, сервоклапан, расходомер, распределитель, и через сливную магистраль, подключенную к распределителю, соединены с баком для гидравлической жидкости, подшипник снабжен измерительным блоком, в состав которого входят датчик температуры, датчик давления, два датчика перемещения, установленные под углом 90 градусов к друг к другу, и датчик осевого перемещения, при этом все датчики, насосная станция, сервоклапан, расходомер и распределитель соединены прямой и обратной связью с электронным блоком сбора, обработки и управления сигналами.
Технический результат заключается в поддержании рационального зазора между валом и подшипником скольжения на всех режимах работы, что приводит к увеличению ресурса подшипникого узла при большой частоте вращения вала.
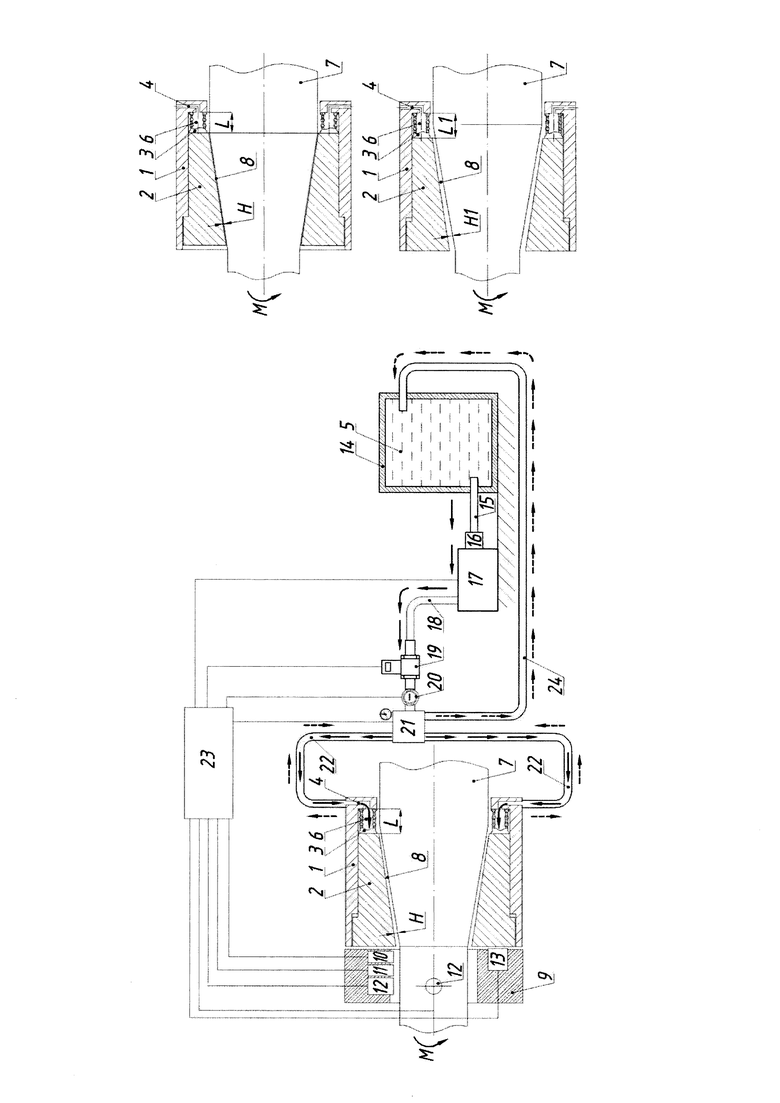
Сущность изобретения поясняется чертежом.
Подшипник скольжения имеет наружную 1 и внутреннюю 2 втулки, соединенные с помощью упругого гофрированного элемента 3. Торцевая поверхность наружной втулки 1 и внутренняя торцевая поверхность втулки 2 соединены с упругим гофрированным элементом 3 при помощи сварки или пайки. Внутренняя поверхность внутренней втулки 2 выполнена конусообразной. Упругий гофрированный элемент 3 представляет собой полую металлическую или резинометаллическую оболочку с возможностью расширения ее вдоль оси подшипника при гидравлическом воздействии. Во втулке 1 выполнены каналы 4 для подачи гидравлической жидкости 5 в полость 6 гофрированного элемента 3. Внутренняя втулка 2 подшипника скольжения посажена на вал 7, пространство между ними заполнено смазочным материалом 8. В состав подшипника скольжения входит измерительный блок 9, в котором установлены датчик 10 температуры, датчик 11 давления, два датчика 12 перемещения, установленные под углом 90 градусов друг к другу, и датчик 13 осевого перемещения. Для обеспечения работы подшипника скольжения установлен бак 14 с гидравлической жидкостью 5, который связан с каналами 4 втулки 1 через напорную магистраль, включающую последовательно установленные гидравлический шланг 15, фильтр 16, насосную станцию 17, гидравлический шланг 18, сервоклапан 19, расходомер 20, распределитель 21 и гидравлические шланги 22. Датчик 10 температуры, датчик 11 давления, датчики 12 перемещения и датчик 13 осевого перемещения, насосная станция 17, сервоклапан 19, расходомер 20 и распределитель 21 соединены прямой и обратной связью с электронным блоком 23 сбора, обработки и управления сигналами, причем распределитель 21 через сливную магистраль 24 соединен с баком 14.
Работа подшипника скольжения осуществляется следующим образом.
Для регулирования основных характеристик подшипника скольжения, например, несущей способности в период эксплуатации важен зазор Н между вращающимся валом 7 и внутренней втулкой 2. Величина начального зазора Н определена конструкцией узла. В период эксплуатации величина зазора Н контролируется датчиком 13 осевого перемещения.
Возможны следующие варианты работы.
Вариант 1. В процессе вращения вала 7 во внутренней втулке 2 в смазочном материале 8 происходит диссипация энергии, выражающаяся в выделении тепла. Величина выделяющегося тепла контролируется датчиком 10 температуры, полученный сигнал поступает на электронный блок 23 сбора и обработки сигналов и управления сигналом, где он регистрируется и обрабатывается. Если полученная величина превышает допустимое значение, тогда из электронного блока 23 сбора, обработки и управления сигналами, в соответствии с управляющей программой, нараспределитель 21 и сервоклапан 19 подается сигнал, который изменяет один из параметров работы, например, степень открытия или направления потока гидравлической жидкости 5. Насосная станция 17 через последовательно установленные гидравлический шланг 15, фильтр 16, гидравлический шланг 18, сервоклапан 19, расходомер 20, распределитель 21, гидравлические шланги 22 подает гидравлическую жидкость 5 из бака 14 через каналы 4, расположенные во втулке 1, в полость 6 упругого гофрированного элемента 3. При этом увеличивается длина упругого гофрированного элемента 3 с величины L до величины L1 и происходит осевое смещение внутренней втулки 2 в левую сторону, что приводит к увеличению зазора с величины Н до величины H1 между валом 7 и внутренней втулкой 2. Все параметры работы контролируются датчиком 10 температуры, датчиком 11 давления, датчиками 12 перемещения и датчиком 13 осевого перемещения, сервоклапаном 19 и расходомером 20, распределителем 21, соединенными прямой и обратной связью с электронным блоком 23 сбора, обработки и управления сигналами.
Вариант 2. В процессе вращения вала 7 во внутренней втулке 2 происходит снижение давления смазочного материала 8, что контролируется датчиком 11 давления. Полученный сигнал поступает на электронный блок 23 сбора, обработки и управления сигналами, где он регистрируется и обрабатывается. Если полученная величина изменяется меньше допустимого значения, тогда из электронного блока 23 сбора, обработки и управления сигналами, в соответствии с управляющей программой, нараспределитель21 и сервоклапан 19 подается сигнал, который изменяет один из параметров работы, например, степень открытия или направления потока гидравлической жидкости 5. Насосная станция 17 через последовательно установленные гидравлический шланг 15, фильтр 16, гидравлический шланг 18, сервоклапан 19, расходомер 20, распределитель 21, гидравлические шланги 22 уменьшает подачу гидравлической жидкости 5 из бака 14 через каналы 4, расположенные во втулке 1, в полость 6 упругого гофрированного элемента 3. При этом уменьшается длина упругого гофрированного элемента 3 с величины L1 до величины L, происходит осевое смещение внутренней втулки 2 в правую сторону, что приводит к уменьшению зазора с величины H1 до величины Н между валом 7 и внутренней втулкой 2. Все параметры работы контролируются датчиком 10 температуры, датчиком 11 давления, датчиками 12 перемещения и датчиком 13 осевого перемещения, сервоклапаном 19 и расходомером 20, распределителем 21, соединенными прямой и обратной связью с электронным блоком 23 сбора, обработки и управления сигналами.
Вариант 3. В процессе работы происходит изменение положения вала 7 относительно внутренней втулки 2. Это контролируется датчиками 12 перемещения, полученный сигнал поступает на электронный блок 23 сбора, обработки и управления сигналами, где он регистрируется и обрабатывается. Если полученная величина изменяется больше допустимого значения, тогда в ответ из электронного блока 23 сбора, обработки и управления сигналами, в соответствии с управляющей программой, на распределитель 21 и сервоклапан 19 подается сигнал, который изменяет один из параметров работы, например, степень открытия или направления потока гидравлической жидкости 5. Насосная станция 17 через последовательно установленные гидравлический шланг 15, фильтр 16, гидравлический шланг 18, сервоклапан 19, расходомер 20, распределитель 21, гидравлические шланги 22 уменьшает подачу гидравлической жидкости 5 из бака 14 через каналы 4, расположенные во втулке 1, в полость 6 упругого гофрированного элемента 3. При этом длина упругого гофрированного элемента 3 может изменяться как с величины L до величины L1, при этом происходит осевое смещение внутренней втулки 2 в левую сторону, что приводит к увеличению зазора с величины Н до величины H1 между валом 7 и внутренней втулкой 2, так и с величины L1 до величины L, при этом происходит осевое смещение внутренней втулки 2 в правую сторону, что приводит к уменьшению зазора с величины H1 до величины Н между валом 7 и внутренней втулкой 2. Такие изменения могут происходить до полной стабилизации положения вала 7 относительно внутренней втулки 2. Все параметры работы контролируются датчиком 10 температуры, датчиком 11 давления, датчиками 12 перемещения и датчиком 13 осевого перемещения, сервоклапаном 19, расходомером 20, соединенными прямой и обратной связью с электронным блоком 23 сбора, обработки и управления сигналами.
Таких вариантов работы подшипника скольжения с изменяемой геометрией может быть множество.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНЫЙ ПОДШИПНИКОВЫЙ УЗЕЛ С ИНТЕЛЛЕКТУАЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2821860C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ С АКТИВНЫМ УПРАВЛЕНИЕМ | 2020 |
|
RU2749362C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ С АКТИВНЫМ УПРАВЛЕНИЕМ | 2019 |
|
RU2734066C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ С ИСПОЛЬЗОВАНИЕМ АЭРИРОВАННОГО, МИКРОПОЛЯРНОГО И ГИБРИДНОГО СМАЗОЧНЫХ МАТЕРИАЛОВ | 2019 |
|
RU2734067C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ С МНОГОЗОННОЙ ПОДАЧЕЙ СМАЗОЧНОГО МАТЕРИАЛА | 2019 |
|
RU2733996C1 |
| МЕХАТРОННАЯ УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ | 2018 |
|
RU2701744C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ АКТИВНЫХ ПОДШИПНИКОВ СКОЛЬЖЕНИЯ | 2020 |
|
RU2757062C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ | 2018 |
|
RU2701198C1 |
| ТРИБОМЕХАТРОННЫЙ СТЕНД ДЛЯ ИССЛЕДОВАНИЯ АКТИВНЫХ РОТОРНЫХ ОПОР | 2022 |
|
RU2796705C1 |
| СПОСОБ УПРАВЛЕНИЯ РАДИАЛЬНО-ОСЕВЫМИ ДВИЖЕНИЯМИ РОТОРА | 2022 |
|
RU2792850C1 |
Изобретение относится к области машиностроения, в частности к подшипникам скольжения, и может быть использовано в узлах механизмов и машин для обеспечения вращательного движения. Подшипник скольжения содержит внутреннюю и наружную втулки, устройство перемещения внутренней втулки, блок сбора, обработки и управления сигналами, который соединен прямой и обратной связью с датчиками температуры, перемещения и давления. Внутренняя поверхность внутренней втулки выполнена конусообразной. В наружной втулке выполнены каналы для подачи гидравлической жидкости в полость устройства перемещения внутренней втулки, выполненного в виде упругого гофрированного элемента, представляющего собой полую металлическую или резинометаллическую оболочку с возможностью расширения ее вдоль оси подшипника при гидравлическом воздействии, причем этот элемент одной стороной соединен с торцевой поверхностью внутренней втулкой, а другой - с торцевой внутренней поверхностью наружной втулки, каналы которой через напорную магистраль, включающую последовательно установленные гидравлические шланги, фильтр, насосную станцию, сервоклапан, расходомер, распределитель, и через сливную магистраль, подключенную к распределителю, соединены с баком для гидравлической жидкости, подшипник снабжен измерительным блоком, в состав которого входят датчик температуры, датчик давления, два датчика перемещения, установленных под углом 90 градусов друг к другу, и датчик осевого перемещения. Все датчики, насосная станция, сервоклапан, расходомер и распределитель соединены прямой и обратной связью с электронным блоком сбора, обработки и управления сигналами. Технический результат: увеличение ресурса работы конического подшипника скольжения. 1 ил.
Подшипник скольжения, содержащий внутреннюю и наружную втулки, устройство перемещения внутренней втулки, блок сбора, обработки и управления сигналами, который соединен прямой и обратной связью с датчиками температуры, перемещения и давления, отличающийся тем, что внутренняя поверхность внутренней втулки выполнена конусообразной, в наружной втулке выполнены каналы для подачи гидравлической жидкости в полость устройства перемещения внутренней втулки, выполненного в виде упругого гофрированного элемента, представляющего собой полую металлическую или резинометаллическую оболочку с возможностью расширения ее вдоль оси подшипника при гидравлическом воздействии, причем этот элемент одной стороной соединен с торцевой поверхностью внутренней втулкой, а другой - с торцевой внутренней поверхностью наружной втулки, каналы которой через напорную магистраль, включающую последовательно установленные гидравлические шланги, фильтр, насосную станцию, сервоклапан, расходомер, распределитель, и через сливную магистраль, подключенную к распределителю, соединены с баком для гидравлической жидкости, подшипник снабжен измерительным блоком, в состав которого входят датчик температуры, датчик давления, два датчика перемещения, установленных под углом 90 градусов друг к другу, и датчик осевого перемещения, при этом все датчики, насосная станция, сервоклапан, расходомер и распределитель соединены прямой и обратной связью с электронным блоком сбора, обработки и управления сигналами.
| МЕХАТРОННЫЙ ПОДШИПНИК КАЧЕНИЯ | 2019 |
|
RU2734174C1 |
| АКТИВНАЯ ГИДРОСТАТИЧЕСКАЯ ОПОРА С РЕГУЛИРУЕМЫМ ДАВЛЕНИЕМ ПОДАЧИ СМАЗОЧНОГО МАТЕРИАЛА | 2016 |
|
RU2648550C2 |
| ГИДРОСТАТИЧЕСКАЯ ОПОРА | 1989 |
|
SU1826646A1 |
| Гидродинамический радиальный сегментный подшипник скольжения | 1986 |
|
SU1516640A1 |
| WO 2012034568 A1, 22.03.2012. | |||

