(54) МОДУЛЬ МАНИПУЛЯТОРА

| название | год | авторы | номер документа |
|---|---|---|---|
| СЦЕПКА ДЛЯ ПРИСОЕДИНЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ | 1965 |
|
SU173499A1 |
| Устройство для автоматической электродуговой сварки прямолинейных швов ограниченной длины | 1975 |
|
SU605708A1 |
| ШАРНИР С РЕГУЛИРУЕМОЙ ЖЕСТКОСТЬЮ | 2023 |
|
RU2823265C1 |
| УСТРОЙСТВО ДЛЯ НАЛОЖЕНИЯ ПРОТЕКТОРА | 1973 |
|
SU364469A1 |
| Манипулятор | 1979 |
|
SU844263A2 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| Устройство для обработки сложных поверхностей | 1987 |
|
SU1437189A1 |
| Устройство для обработки оптических деталей | 1978 |
|
SU745653A1 |
| ДВУХКОМПОНЕНТНЫЙ ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 2005 |
|
RU2363570C2 |
| Промышленный робот | 1987 |
|
SU1444141A1 |

1
Изобретение относится к машиностроению, в частности к манипуляторам, применяемым для механизации и автоматизации вспомогательных технологических операций.
Известны модули манипуляторов, содержащие корпус, привод и механизм преобразования движения привода в движение выходного звена 1.
Каждый модуль обеспечивает одну степень подвижности выходного звена. Для получен ия манипулятора с несколькими степенями подвижности требуется связать в единую конструкцию соответствующее число модулей, чтоувеличивает габариты манипулятора и снижает его быстродействие из-за последовательной отработки перемещений по каждой степени.
Цель изобретения - увеличение числа степеней подвижности выходного звена модуля манипулятора с одновременным уменьшением его габаритов и повышением быстродействия.
Указанная цель достигается тем, что корпус модуля выполнен составным из двух частей, имеющих возможность перемещения одна относительно другой, а механизм преобразования движения привода в движение выходного звена выполнен в виде зубчато-винтовой передачи,, полой штанги и тормозных муфт, причем зубчатое колесо этой передачи связано с одной частью корпуса, винтовой элемент смонтирован в
5 штанге и связан с другой частью корпуса, а тормозные муфты смонтированы на валу зубчатого колеса и на штанге.
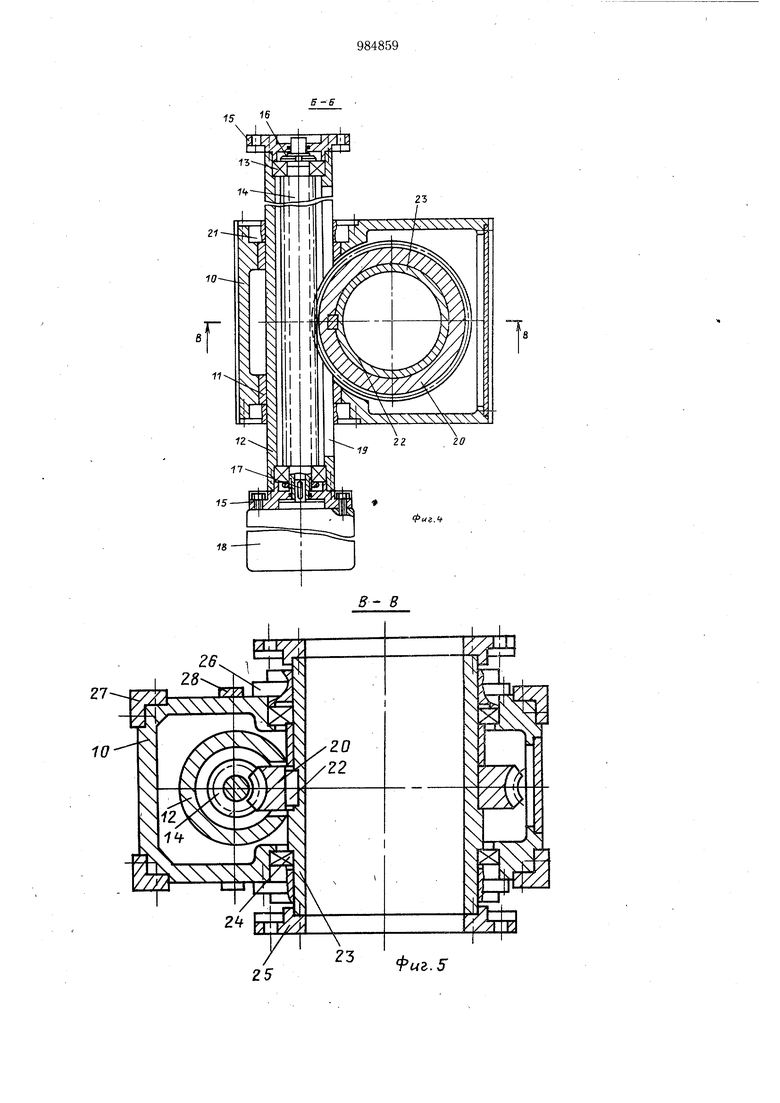
На фиг. 1 схематически изображен манипулятор модульной конструкции, общий вид; на фиг. 2 - то же, вид сверху; на
10 фиг. 3 - вид по стрелке А-на фиг. 1; на . 4 - разрез Б-Б на фиг. 1 (основание манипулятора не показано); на фиг. 5 - разрез В-В на фиг. 4; на фиг. 6 - модуль манипулятора, вариант с шариковой вячной передачей, вид в плане; на фиг. 7 - разрез Г-Г на фиг. 6; на фиг. 8-12 - варианты построения манипуляторов напольного исполнения, общие виды; на фиг. 13-16 - то же, подвесного исполнения.
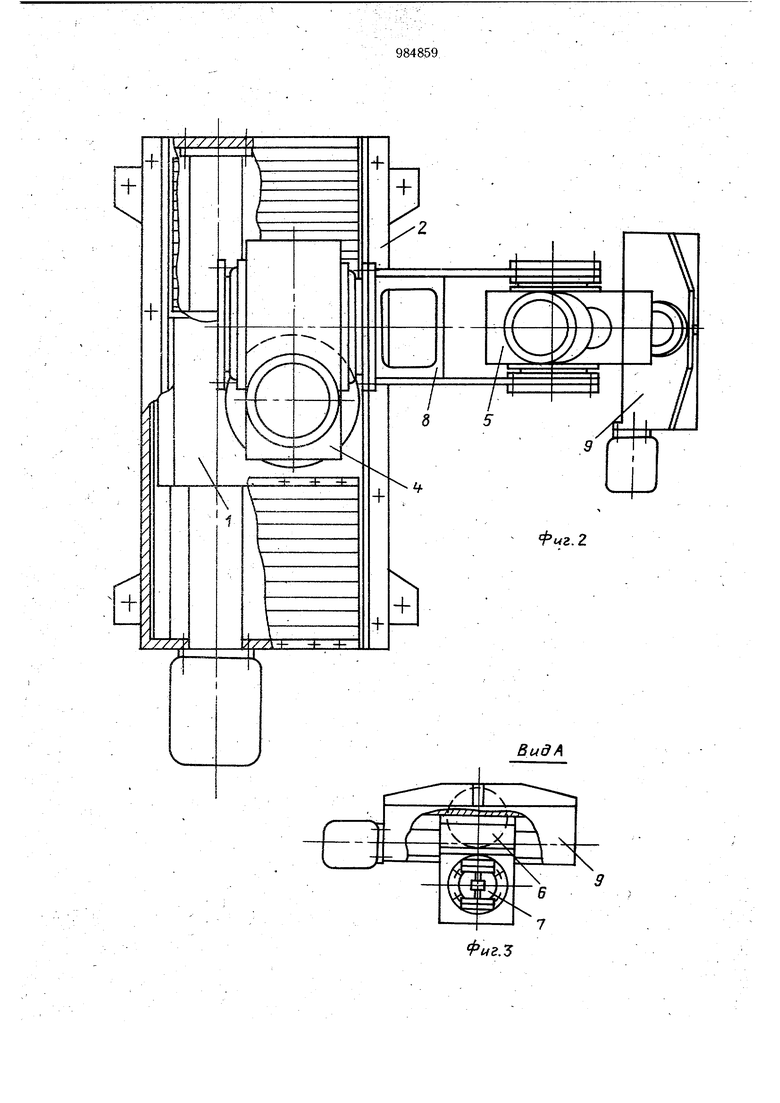
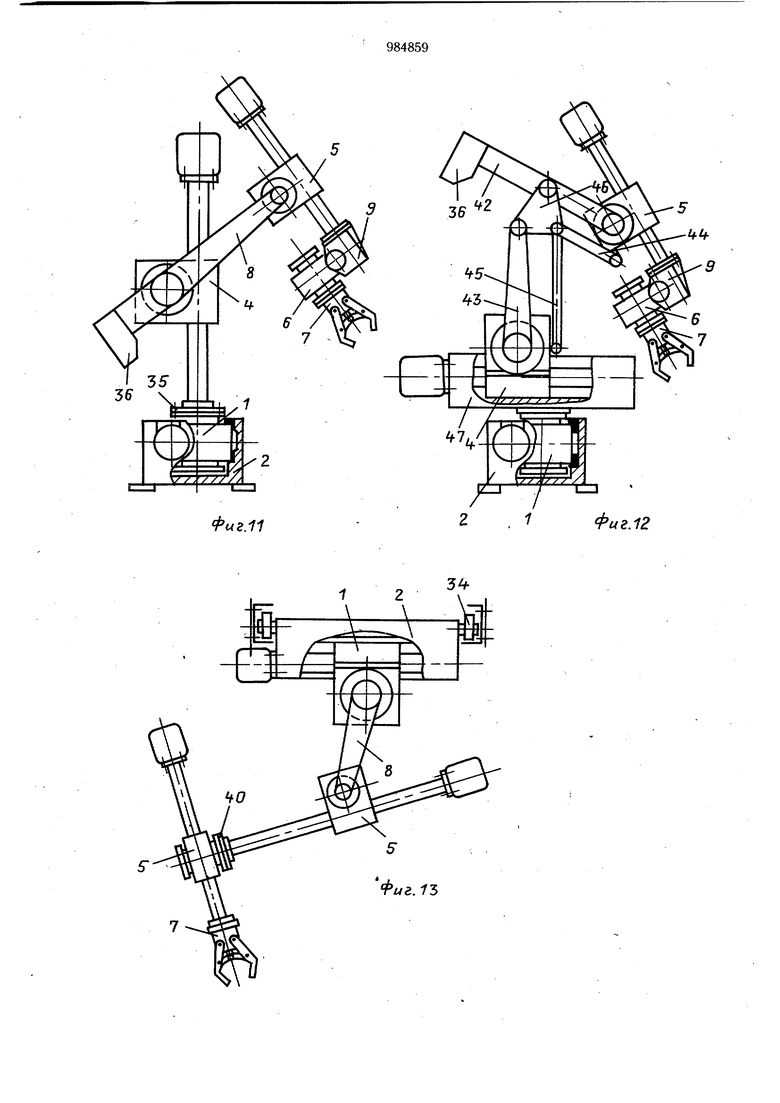
Манипулятор компануется из идентич20ных модулей нескольких типоразмеров, обычно двух-трех. Модуль I (наибольшего габарита) устанавливается в основании 2 манипулятора таким образом, что корпус модуля подвижен относительно направляющих 3 основания 2, а mtanra модуля закреплена в основании 2. Количество модулей, из которых собирается манипулятор, определяется его назначением и, соответственно, числом степеней свободы манипулятора. Так например, манипулятор с восьмю степенями свободы (фиг. 1) имеет четыре модуля 1, 4, 5 и 6 трех типоразмеров, причем модули 1 и 4 одного типоразмера, но имеют разную длину штанги. Наименьший по габаритам модуль 6 используется в основном для перемеш,ения и вращения захвата 7, который оснаш,ен электромеханическим или пневматическим приводным устройством (не показаны). -Модули могут стыковаться непосредственно друг с другом своими фланцами, например модули 1 и 4, или с помош,ью промежуточного рычага 8, например модули 4 и 5. Корпус модуля 6 установлен подвижно в направляюш,их корпуса 9, связанного с фланцем модуля 5, а к фланцу модуля 6 крепится захват с его приводным устройством.
Модуль манипулятора (фиг. Ф) состоит из корпуса 10, в направляющих 11 которого установлена с возможностью осевого перемещения штанга 12. В центральной расточке штанги 12 на подшипниках 13 установлен элемент зубчато-винтовой передачи, в частности червячной передачи, например червяк 14, который фиксируется в осевом направлении фланцами 15 и гайками 16. Червяк 14 с помощью шпонки 17 соединен с приводом 18, который закреплен на фланце 15. Фланец 15 имеет унифицированную соединительную поверхность и отверстия для присоединения к модулю последующего типоразмера и образует с корпусом 10 две под вижные одна относительно другой части корпуса. В нижней части штанги 12, поперечное сечение которой может быть цилиндрической или квадратной формы, выполнен паз 19, благодаря которому червяк 14, расположенный внутри штанги, соединен с червячным колесом 20, Фиксация осевого перемещения щтанги 12 относительно корпуса 10 осуществляется с помощью одной или нескольких управляемых муфт 21. Управляемые муфты 21 конструктивно могут быть выполнены в виде электромагнитных порощковых муфт, работающих в тормозном режиме, или в виде иных фрикционных муфт с электромагнитным управлением. epвячнoe колесо (фиг. 5) неподвижно закреплено с помощью, например, шпонки 22 на полом .валу 23, который установлен на подшипниках 24 в корпусе 10 модуля. На концах полого вала 23 неподвижно укреплены фланцы 25, каждый из которых имеет унифицированную соединительную поверхность и крепежные отверстия, служащие или для крепления через промежуточный фланец модуля этого же типоразмера, или для крепления щтанги модуля ближайщего типоразмера, но больщего по величине.
Вал 23 с закрепленными на нем фланцами 25 фиксируется от поворота относительно корпуса 10 модуля с Помощью одной или нескольких управляемых муфт 26, которые конструктивно могут быть аналогичны муфтам 21.
На корпусе 10 модуля установлены направляющие 27 и 28, располагаемые в направлении оси червяка 14. Наличие направляющих определяется местом расположения модуля в общей кинематической схеме манипулятора.
Корпус 10 модуля 1, устанавливаемого в основание 2 манипулятора, снабжен направляющими 27, а модуль 6, применяемый для перемещения и вращения захвата 7, снабжен еще дополнительными направляющими 28.
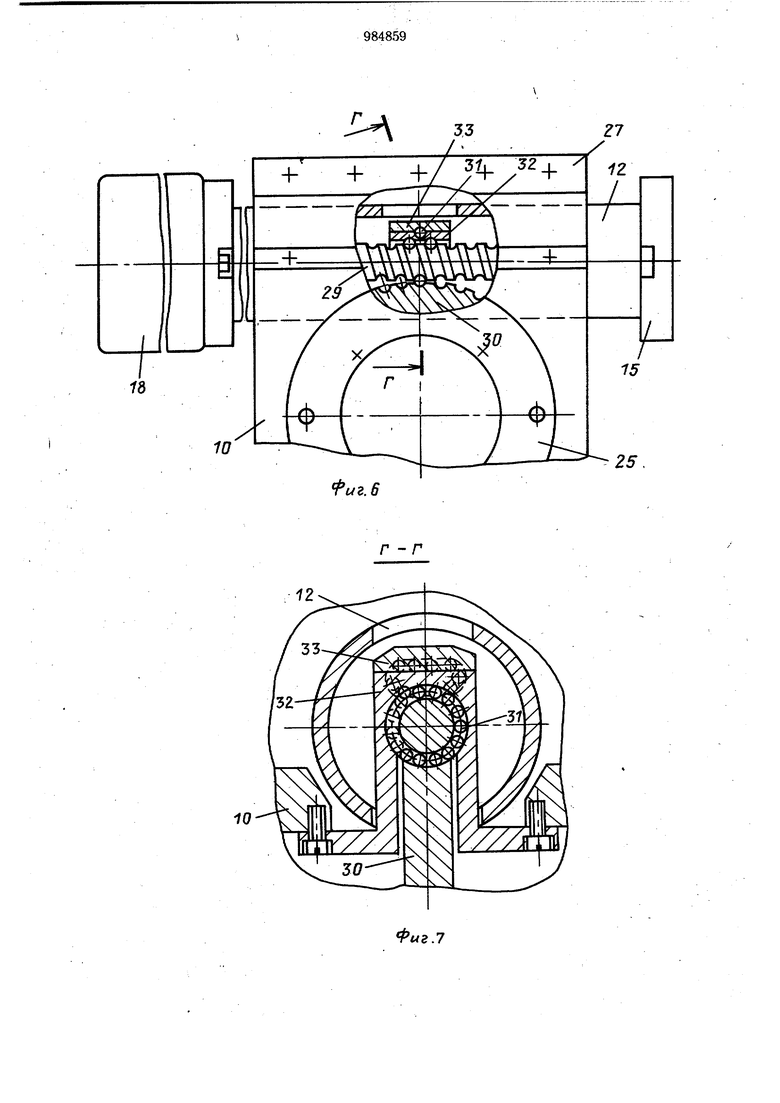
В случае применения шариковой червячной передачи модуль манипулятора (фиг. 6) отличается от описанного выше тем, что червяк 28 и червячное колесо 30 имеют ароч0 ный профиль резьбы, между витками червяка и зубьями колеса расположены щарики 31, удерживаемые от выпадания корпусом 32 жестко соединенные с корпусом 10 модуля. На корпусе шариковой червячной передачи
J расположено устройство 33 возврата щариков (фиг. 7). Корпус 32 располагается во внутренней полости щтанги 12 и фиксирует ее от поворота.
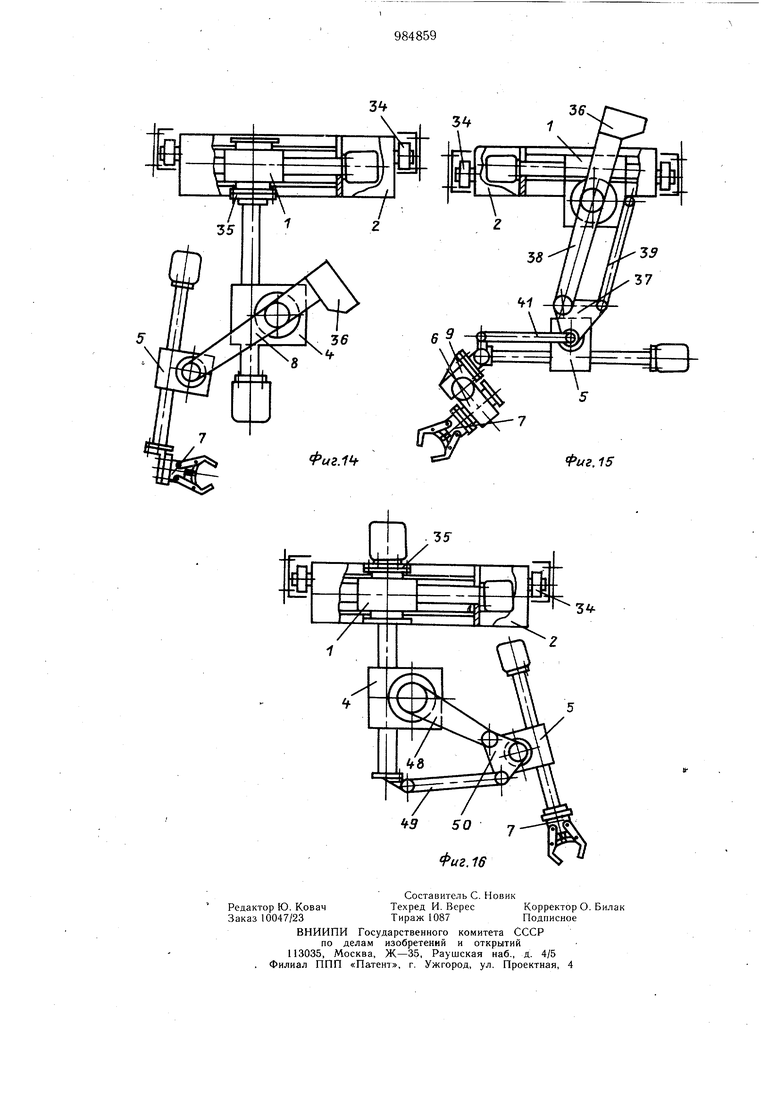
Манипулятор может устанавливаться 0 относительно технологического оборудования или стационарно (фиг. 1, 8, 10, 11 и 12), или подвижно, тогда манипулятор имеет возможность совершать перемещения относительно технологического оборудования по направляющим с помощью подвижной 5 тележки (фиг. 9, 13, 14, 15 и 16). Имеется несколько вариантов построения манипуляторов благодаря многообразию различного вида соединений модулей друг с другом с помощью стыковочных поверхностей и - промежуточных деталей:
-поворотный фланец модуля 1 стыкуется через промежуточный фланец 35 с фланцем штанги последующего .модуля 4 (фиг. 1, 8, 10, 11, 14 и 16).
-поворотный фланец модуля 4 или мо5 дуля 1 соединен с поворотным фланцем другого модуля 5 с помощью промежуточного рычага 8, на котором может, при необходимости устанавливаться противовес 36 (фиг. 1, 11, 13 и 14);
-последующий модуль, например мо дуль 5, крепится своим поворотным фланцем к кронштейну 37, который совместно с корпусом модуля 1 или 4, рычагом 38 и тягой 39 образует параллелограмм, обеспечивающий плоскопараллельное движение
модуля 4 (фиг. 9, 10 и 15);
-поворотный фланец последующего модуля 5 стыкуется через промежуточный фланец 40 с фланцем штанги предыдущего модуля 5 taKoro же типоразмера (фиг. 13);
-корпус модуля б, к поворотному фланцу которого крепится захват 7 со своим приводным устройством, установлен подвижно в направляющих корпуса 9, который устанавливается или непосредственно на фланец штанги, йапример, модуля 5 (фиг. 1, 9, 11 и 12), или на кронштейн .37 (фиг. 8), или поворотно на фланце штанги, например, модуля 5, соединяясь с кронштейном ;37 тягой 41 (фиг. 10 и 15);
-поворотный фланец последующего модуля, например модуля 5, и поворотный фланец предыдущего модуля, например модуля 4, соединяются друг с другом с помощью системы рычагов 42 и 43, тяг 44 и 45 и кронщтейна 46, образующих сдвоенный параллелограмм (фиг. 12);
-последовательное соединение модулей, установленных подвижно в направ.ляющих своего основания, например, к поворотному фланцу модуля , установленному подвижно в основании 2, к которому крепится основание 47 последующего модуля 4, установленного в своем основании 47 подвижно (Ф:г.. 2);
-корпус последующего модуля, например модуля 4, соединен подвижно с поворотным фланцем предыдущего модуля 1, а щтанга модуля 4 проходит внутри поворотного фланца модуля 1, последующий же модуль 5 крепится к модулю 4 с помощью рычага 48, тяги 49 и кронщтейна 50. которые со штангой модуля 4 образуют четырехзвенник, положение звеньев которого может изменяться в пространстве (фиг. 16).
Захват 7 может или соединяться с поворотным фланцем модуля 6 (фиг. 1, 8, 9, 10, 11, 12 и 15), или крепиться непосредственно к фланцу штанги модуля 5 (фиг.13 - 16).
Модуль манипулятора (фиг. 4), из которого собраны различные по своей кинемати.ке манипуляторы, работает следующим образом.
В зависимости от того, какое выполняется перемещение, - поворот вала 23 или линейное перемещение щтанги 12, приводятся в действие или муфты 21, или, соответственно, муфты 26.
При этом привод 18 с червяком 14 является ведущим элементом, а ведомым элементом может быть или полый вал 23 с фланцами 25, или штанга 12 (в зависимости от срабатывания муфт 21 или 26).
При повороте вала 23,с закрепленными на нем фланцами 25 приводят в действие муфты 21, которые фиксируют неподвижно штангу 12.относительно корпуса 10 модуля. При вращении червяка 14 поворачивается на заданный угол червячное колесо 20 и, соответственно, жестко связанный с ним вал 23, который от осевого перемещения в корпусе зафиксирован, напри.мер, радиально-упорными подшипниками 24 и фиксирующими их муфтами 26. Система управления манипулятором (не показана) останавливаем привод 18 и фиксирует положение вала 23 с помощью управляемых муфт 26. При перемещении щтанги 12 управляемые муфты 21
5 расторможены и допускают линейное перемещение штанги 12 в направляющих II относительно корпуса 10. При вращении червяка 14 от привода 18 при заторможенном червячном колесе 20 происходит навинчивание его на червячное колесо, при этом штан га 12 вместе с приводом 18 и червяком 14 перемещается в осевом направлении отно-, сительно корпуса 10. Система управления управляет положением щтанги 12. Предельные положения щтанги -12 и поворотного
5 вала 23 ограничиваются конечными датчиками (не показаны). При перемещении щтанги 12 или вращении вала 23 оба движения выполняются от одного привода 18 раздельно по времени. Модуль манипулятора, в которо.м применена шариковая червячная передача, работает аналогично. Например, при зафиксированном червячном колесе 30 (фиг. 6 и 7) и вращении червяка 29 щарики 31 начинают вращаться вокруг своих осей и одновременно перемещаться вдоль впадины резьбы, а червяк 29 вместе со штангой 12 получает осевое перемещение в направлении, зависящем от вращения червяка. Благодаря отражателям, установленным в корпусе 32 и направляющим шарики 31 в устройство 33 их возврата, щари0 ки 31 циркулируют от заданной траектории. При неподвижной штанге 12 и вращении червяка 29 происходит поворот червячного колеса 30 и связанного с ним вала.
Манипулятор, собранный из унифицированных модулей 1, 4, 5 и 6 (фиг. 1) имеет
5 восемь степеней свободы и может одновременно выполнять до четырех движений. С помощью модуля 1 выполняется региональное перемещение манипулятора относительно технологического оборудования, здесь щтанга модуля закреплена неподвижно, а перемещается корпус 10 модуля в направляющих основания, кроме того, с помощью модуля 1 осуществляется поворот манипулятора относительно вертикальной оси. С помощью модуля 4 осуществляется подъем
5 и опускание плеча манипулятора, а также поворот руки манипулятора относительно горизонтальной оси. С помощью модуля 5 осуществляется выдвижение и качание руки манипулятора, а с помощью модуля 6 - перемещение захвата 7 и его ротация. Принцип действия кинематики остальных типов манипуляторов, показанных на фиг. 8-16 аналогичен.
Предлагаемый манипулятор модульной конструкции, каждый модуль которого выполнен в виде совмещенного модуля поворота и линейного перемещения, приводимого в действие последовательно от одного привода, позволяет оперативно создавать манипуляторы необходимой кинематики в зависимости от обслуживаемого ими технологического оборудования и автоматизируемого технологического процесса. Благодаря возможности расположения модуля с установкой осей вращения и линейного перемещения в направлении различных осей координат и определенному числу комбинаций расположения модулей друг относительно друга возможно больщое количество вариантов построения кинематических схем манипуляторов, что позволяет создать целую гамму манипуляторов с необходимым числом степеней свободы, необходимой грузоподъемностью, заданными габаритными размерами. При этом упрощаются и удещевляются ремонтные работы, упрощается проектирование манипуляторов для обслуживания новых технологических процессов.
Формула изобретения .
Модуль манипулятора, содержащий корпус, привод и механизм преобразования
движения привода в движение выходного звена, отличающийся тем, что, с целью увеличения числа степеней подвижности выходного звена с одновременным уменьплением габаритов и повышением быстродействия, корпус выполнен составным из двух частей, имеющих возможность перемещепия одна относительно другой, а механизм преобразования движения привода в движение выходного звена выполнен в виде зубчатовинтовой передачи, полой щтанги и ,тормозных муфт, причем зубчатое колесо этой передачи связано с одной частью корпуса, винтовой элемент смонтирован в щтанге и связан с другой частью корпуса, а, тормозные муфты смонтированы на валу зубчатого колеса и на штанге.
Источники информации, принятые во внимание при экспертизе 1. Сурния Б. Н. и др. Особенности конструкции роботов модульного типа. «Станки и инструменты, 1978, Л 7, с. 13.
ФигЗ
5-Б
IB
фаг.if
12
г - г
Фиг.7 3 35-Г мг.5 .lO
