Изобретение относится к области преобразовательной техники и может использоваться, в частности, при создании бортовых систем электроснабжения космических аппаратов.
Известны способы импульсной стабилизации напряжения на нагрузке, основанные на периодической коммутации (прерывании) цепи между выходом первичного источника электроэнергии с нестабилизированным напряжением и нагрузкой под управлением широтно-импульсного коммутационного сигнала постоянной частоты, формируемого широтно-импульсной модуляцией аналогового регулирующего сигнала, получаемого, в свою очередь, преобразованием сигнала рассогласования между стабилизируемым напряжением на нагрузке и опорным напряжением - см., например, У. Титце, К. Шенк. Полупроводниковая схемотехника, 12-е издание, Москва, 2015, том 2, гл. 16, п. 16.6, а также патенты на способы питания нагрузки постоянным током - RU 2258292, H02J 7/35; RU 2548664, H02J 7/34; и патенты на устройства, в которых использованы данные способы - RU 2158436, G05B 19/02; RU 2199808, H02J 7/36; RU 2211480, H02J 7/35.
Недостатком известных способов импульсной стабилизации напряжения на нагрузке является сложность обеспечения устойчивости формирования аналогового регулирующего сигнала, в особенности при изменяющейся нагрузке, обусловленная принципиальным наличием пульсаций напряжения на нагрузке, снижение которых требует существенного усиления подавления составляющей основной частоты пульсаций и ее гармоник с помощью низкочастотной фильтрации на входе в нагрузку, что, с одной стороны, приводит к дополнительному фазовому сдвигу, а с другой - ограничивается конструктивными требованиями при значительной мощности нагрузки. В то же время, аналогичное повышение характеристик низкочастотной фильтрации в контуре обратной связи, позволяющее обойти вышеуказанные конструктивные ограничения, также приводит к появлению дополнительного фазового сдвига в этом контуре. Эти обстоятельства, с учетом того, что в системе дискретизации среднее время запаздывания уже составляет половину тактового периода, существенно повышают склонность к нестабильности контура регулирования - см. У. Титце, К. Шенк. Полупроводниковая схемотехника, 12-е издание, Москва, 2015, том 2, гл. 16, п. 16.6.2.
Наиболее близким к заявляемому (прототипом) является способ, реализованный в схеме импульсного понижающего преобразователя, представленного в У. Титце, К. Шенк. Полупроводниковая схемотехника, 12-е издание, Москва, 2015, том 2, гл. 16, п. 16.6.2, включающий преобразование нестабилизированного постоянного напряжения первичного источника в импульсную форму под воздействием прерывающего широтно-импульсного бинарного коммутационного сигнала постоянной тактовой частоты, низкочастотную фильтрацию полученного импульсного напряжения первичного источника и последующую подачу его на нагрузку, а также определение рассогласования между напряжением на нагрузке и заданным опорным напряжением.
Задачей, на решение которой направлено заявляемое изобретение, и его техническим результатом является обеспечение устойчивости регулирования напряжения на нагрузке при сохранении его среднего значения и пульсаций в заданных пределах, в том числе, в условиях изменяющейся мощности нагрузки.
Указанный технический результат достигается тем, что в известном способе, включающем в себя
- преобразование нестабилизированного постоянного напряжения первичного источника в импульсную форму под воздействием прерывающего широтно-импульсного бинарного коммутационного сигнала постоянной тактовой частоты, низкочастотную фильтрацию полученного импульсного напряжения первичного источника и последующую подачу его на нагрузку, а также определение рассогласования между напряжением на нагрузке и заданным опорным напряжением,
дополнительно осуществляют
- непрерывное формирование ансамбля синхронизированных широтно-импульсных бинарных коммутационных сигналов постоянной тактовой частоты с различными значениями скважности,
- выбор на каждом тактовом интервале из состава формируемого ансамбля одного коммутационного сигнала, обладающего требуемой скважностью, значение которой определяется путем последовательно реализуемых в смежном предшествующем тактовом интервале
- измерений мгновенных значений напряжения на нагрузке в моменты фронта и среза коммутационного сигнала,
- измерения скважности коммутационного сигнала,
- определения среднего на тактовом интервале значения напряжения на нагрузке на основе измеренных мгновенных значений напряжения на нагрузке и скважности коммутационного сигнала,
- определения требуемого значения скважности коммутационного сигнала, компенсирующего рассогласование между средним на данном тактовом интервале значением напряжения на нагрузке и заданным опорным напряжением.
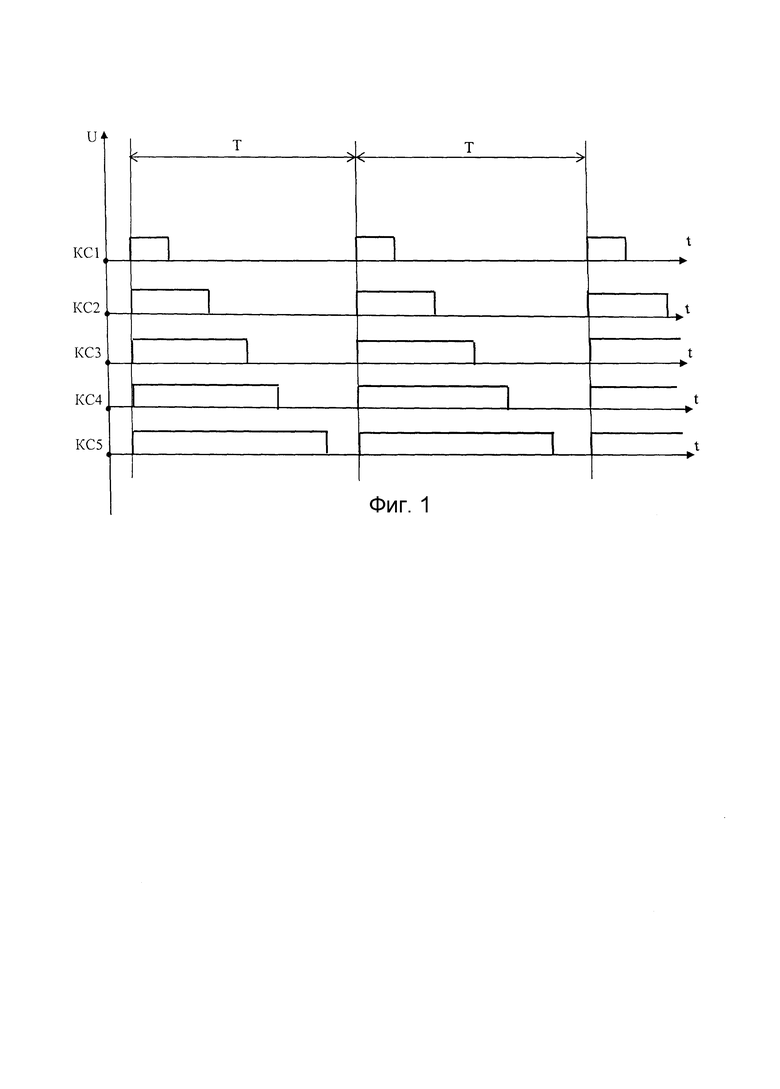
Чертеж фиг. 1 иллюстрирует формирование ансамбля синхронизированных широтно-импульсных бинарных коммутационных сигналов постоянной тактовой частоты с различными значениями скважности. Здесь Т - общий период повторения (тактовый интервал) коммутационных сигналов (КС), а скважность каждого из КС равна отношению его длительности к величине периода Т. (На фиг. 1 для иллюстрации изображен случай пяти коммутационных сигналов КС1…КС5 с различными скважностями, хотя в реальности для построения эффективной системы их число должно составлять несколько десятков).
На фиг. 2 изображены эпюры напряжения на нагрузке для двух смежных тактовых интервалов (периодов тактовой частоты). Здесь обозначено:
Т - длительность тактового интервала;
КСi-1, КСi, КСi+1 - коммутационные сигналы для (i-1)-го, i-го и (i+1)-го тактовых интервалов соответственно;
ТПi-1, ТПi, ТПi+1 - длительности коммутационных сигналов для (i-1)-го, i-го и (i+1)-го тактовых интервалов соответственно;
t1i-1, t1i, t1i+1 - моменты времени, соответствующие фронтам коммутационных сигналов для (i-1)-го, i-го и (i+1)-го тактовых интервалов соответственно;
t2i-1, t2i - моменты времени, соответствующие срезам коммутационных сигналов для (i-1)-го и i-гo тактовых интервалов соответственно;
UH1i-1, UH1i, UH1i+1 - мгновенные значения напряжения на нагрузке, соответствующие моментам фронтов коммутационных сигналов для (i-1)-го, i-го и (i+1)-го тактовых интервалов соответственно;
UH2i-1, UH2i - мгновенные значения напряжения на нагрузке, соответствующие моментам срезов коммутационных сигналов для (i-1)-го и i-го тактовых интервалов соответственно.
При определении среднего на тактовом интервале значения напряжения на нагрузке учитывается то обстоятельство, что для используемых на практике тактовых частот широтно-импульсных бинарных коммутационных сигналов, составляющих от 20 до 200 кГц (см. У. Титце, К. Шенк. Полупроводниковая схемотехника, 12-е издание, Москва, 2015, том 2, гл. 16, п. 16.6.1) и реальных скоростях изменения мощности нагрузки напряжение на нагрузке в интервалах между фронтами и срезами коммутационных сигналов можно с высокой степенью точности считать изменяющимся линейно, причем практически с одинаковой крутизной на смежных тактовых интервалах.
Тогда среднее значение напряжения на нагрузке для (i-1)-го тактового интервала составит

Выражение (1) можно представить в виде

где  - скважность бинарного широтно-импульсного коммутационного сигнала, задействованного на (i-1)-ом тактовом интервале.
- скважность бинарного широтно-импульсного коммутационного сигнала, задействованного на (i-1)-ом тактовом интервале.
Рассогласование между средним значением напряжения на нагрузке и заданным опорным напряжением UОП для (i-1)-го тактового интервала составит

Если потребовать, чтобы на i-ом тактовом интервале указанное рассогласование отсутствовало, т.е.

то нужно определить условия, при которых это требование выполняется. Из (4) и эпюр, представленных на фиг. 2, следует

или

где  - искомая скважность бинарного широтно-импульсного коммутационного сигнала для i-го тактового интервала, которую и требуется найти по результатам определения среднего на (i-1)-м тактовом интервале значения напряжения на нагрузке, и скважности коммутационного сигнала.
- искомая скважность бинарного широтно-импульсного коммутационного сигнала для i-го тактового интервала, которую и требуется найти по результатам определения среднего на (i-1)-м тактовом интервале значения напряжения на нагрузке, и скважности коммутационного сигнала.
Величины, входящие в (6), либо непосредственно измеряются на (i-1)-м тактовом интервале, как UH1i, (измерение UH1i на (i-1)-м тактовом интервале обеспечивается синхронностью формирования бинарных широтно-импульсных коммутационных сигналов, показанной на фиг. 1), либо связаны с измеряемыми элементарными математическими соотношениями:

где  - скорость спада
- скорость спада
напряжения на нагрузке, практически одинаковая в пределах смежных тактовых интервалов;
где  - скорость нарастания напряжения на нагрузке, практически одинаковая в пределах смежных тактовых интервалов.
- скорость нарастания напряжения на нагрузке, практически одинаковая в пределах смежных тактовых интервалов.
С учетом (7) и (8) выражение (6) можно переписать следующим образом:

Последовательно раскрывая (9), приведем его к виду
 ,
,
а из последнего выражения окончательно получаем квадратное уравнение относительно искомой Qi:

или в приведенной форме

Решение данного квадратного уравнения имеет вид:

или после преобразований

Учитывая, что по определению
уравнение (12) имеет только один корень, обладающий физическим смыслом для данной задачи

при этом подкоренное выражение из (14) должно удовлетворять условию

выполнение которого обеспечивается при проектировании конкретного устройства по предлагаемому способу.
Поскольку, с учетом знаков КH и КC согласно (7) и (8) всегда (КHТ - КCТ)>0, то для выполнения (16) должно быть, с одной стороны, (2UОП - 2 UH1i)>КСТ, ас другой - (2UОП - 2 UН1i)<КHТ. Объединяя оба последних неравенства, получим условие (16) в следующем упрощенном виде

Таким образом, выбор для каждого i-го тактового интервала значения скважности Qi бинарного широтно-импульсного коммутационного сигнала согласно решению уравнения (12), полученного на основании измерений, проведенных в смежном предыдущем (i-1)-м тактовом интервале, позволяет компенсировать рассогласование между средним напряжением на нагрузке и заданным опорным напряжением на i-м тактовом интервале. При этом, с одной стороны, обеспечивается устойчивость регулирования напряжения на нагрузке (за счет отсутствия аналогового регулятора в цепи обратной связи), а с другой - сохранение среднего значения этого напряжения в заданных пределах, в том числе, в условиях изменяющейся мощности нагрузки, обеспечиваемое соответствующим выбором количества коммутационных сигналов в составе формируемого ансамбля: погрешность квантования при формирования напряжения на нагрузке в каждом тактовом интервале составляет величину (без учета аппаратной погрешности вычисления Qi, которая в данном случае может быть реализована намного менее существенной)

где N - количество коммутационных сигналов в составе формируемого ансамбля,
UОП - заданное опорное напряжение на нагрузке.
Так, при N=32 получим  что для устройств средней и большей мощности является вполне приемлемым результатом.
что для устройств средней и большей мощности является вполне приемлемым результатом.
В то же время, поскольку максимальный размах пульсации напряжения на нагрузке не может превышать теоретической величины

где IНmax - максимальная величина тока нагрузки, С - суммарная величина емкости низкочастотного фильтра, подключенной параллельно нагрузке, величина этих пульсаций может быть ограничена при проектировании устройства за счет надлежащего выбора емкости С.
Тем самым достигается технический результат и решение задачи заявляемого изобретения.
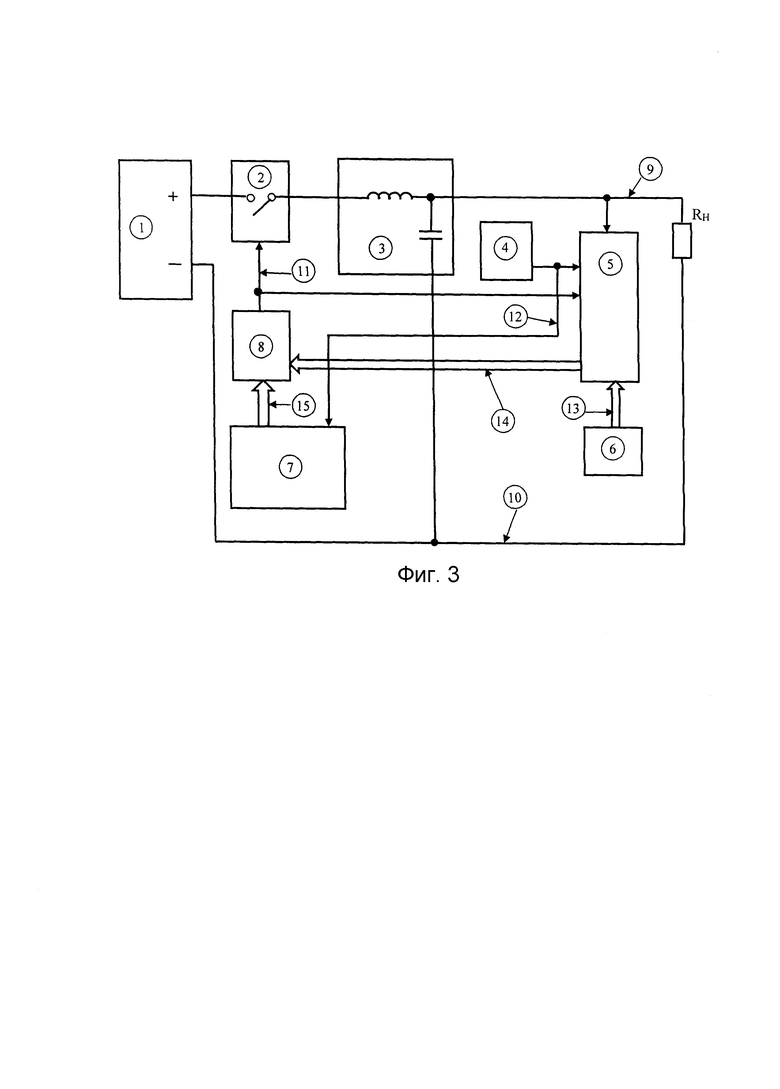
На фиг. 3 представлена структурная схема устройства, реализующего предлагаемый способ. Она включает первичный источник 1 нестабилизированного постоянного напряжения, прерывающий ключ 2, фильтр нижних частот 3, задающий генератор 4 счетных импульсов, измерительно-вычислительный блок 5, источник 6 цифрового кода опорного напряжения, формирователь 7 ансамбля синхронизированных широтно-импульсных бинарных коммутационных сигналов, мультиплексор 8.
На схеме также обозначены: цепь 9 положительной полярности напряжения на нагрузке, цепь 10 отрицательной полярности напряжения на нагрузке (общая шина), цепь 11 управления прерывающим ключом, цепь счетных импульсов 12, цифровой код 13 опорного напряжения, адресный код 14 управления мультиплексором, цепи 15 ансамбля формируемых синхронизированных широтно-импульсных бинарных коммутационных сигналов. Кроме того, условно обозначена нагрузка RH.
Работа устройства происходит следующим образом.
Прерывающий ключ 2 под управлением широтно-импульсного бинарного коммутационного сигнала 11 преобразует выходное нестабилизированное постоянное напряжение источника 1 в импульсную форму. Это импульсное напряжение через фильтр нижних частот 3 поступает на нагрузку RH, образуя цепь 9 положительной полярности напряжения на нагрузке. Напряжение цепи 9 поступает в измерительно-вычислительный блок 5, куда также подаются счетные импульсы 12, широтно-импульсный бинарный коммутационный сигнал 11, управляющий ключом 2, и цифровой код 13 опорного напряжения. В блоке 5 производятся измерения мгновенных значений напряжения 9 на нагрузке в моменты фронта и среза сигнала 11, измеряется счетно-импульсным методом (с использованием счетных импульсов 12) скважность коммутационного сигнала 11, вычисляется среднее на тактовом интервале значение напряжения на нагрузке и определяется рассогласование между этим средним значением и заданным опорным напряжением, рассчитывается требуемое значение скважности коммутационного сигнала, компенсирующее рассогласование между средним значением напряжения на нагрузке и заданным опорным напряжением, производится преобразование рассчитанного требуемого значения скважности в адресный код 14 управления мультиплексором 8, с помощью которого производится выбор из ансамбля 15 одного широтно-импульсного бинарного коммутационного сигнала для следующего тактового интервала.
Следует отметить, что электропитании функциональных узлов устройства может осуществляться через маломощные интегральные стабилизаторы либо непосредственно от первичного источника нестабилизированного постоянного напряжения 1, либо от цепей напряжения нагрузки. (На схеме фиг. 3 цепи электропитания функциональных узлов устройства не показаны.)
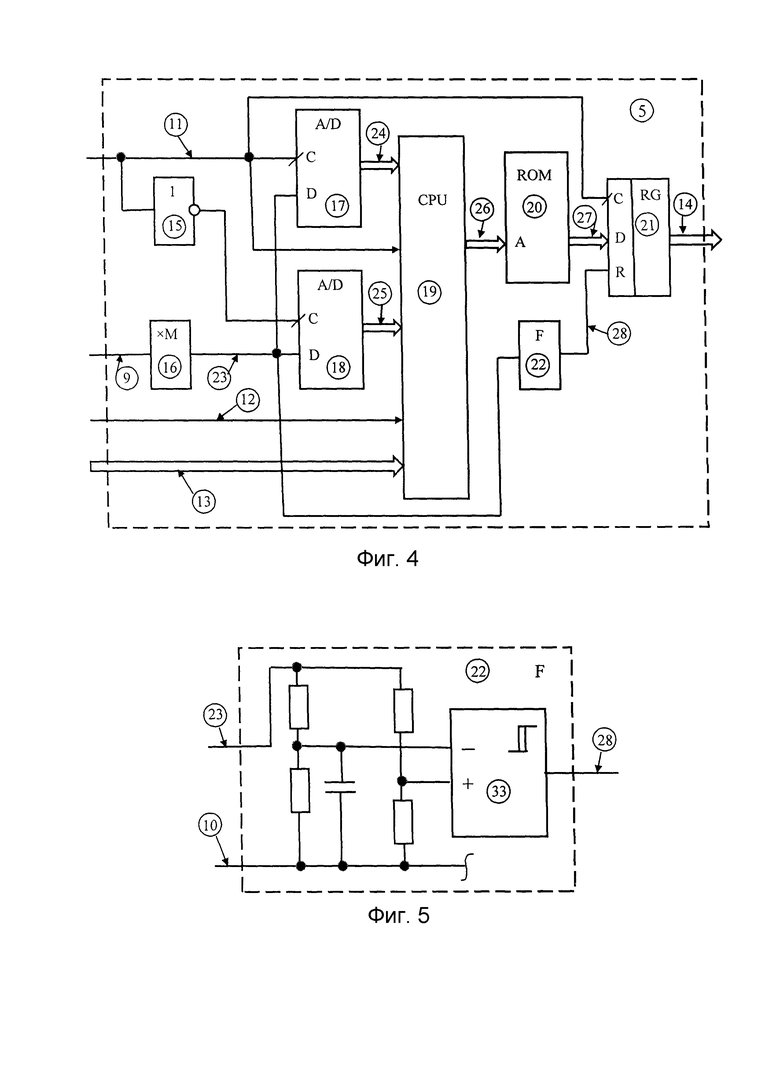
На фиг. 4 представлена структурная схема измерительно-вычислительного блока 5. Она включает логический инвертор 15, масштабирующий узел 16, предназначенный для согласования диапазона реального напряжения на нагрузке с диапазоном входного напряжения узлов блока 5, интегральные параллельные аналого-цифровые преобразователи (АЦП) 17 и 18, вычислительный процессор 19, шифратор 20, параллельный регистр 21 и формирователь импульса начальной установки 22.
На схеме также обозначены: цепь 9 положительной полярности напряжения на нагрузке, цепь 11 сигнала управления прерывающим ключом (коммутационного сигнала -- КС), цепь счетных импульсов 12, цифровой код 13 опорного напряжения, адресный код 14 управления мультиплексором 8 выбора коммутационного сигнала, цепь 23 масштабированного напряжения на нагрузке, код 24 мгновенного значения масштабированного напряжения на нагрузке, соответствующего моменту фронта коммутационного сигнала 11, код 25 мгновенного значения масштабированного напряжения на нагрузке, соответствующего моменту среза коммутационного сигнала 11, код 26 рассчитанного требуемого значения скважности коммутационного сигнала, код 27 рассчитанного требуемого значения скважности коммутационного сигнала, преобразованный в формат адресного кода управления мультиплексором 8 выбора коммутационного сигнала, цепь 28 импульса начальной установки.
Работа блока 5 происходит следующим образом.
В моменты фронта и среза коммутационного сигнала КС АЦП 17 и 18 соответственно производят оцифровку масштабированного напряжения 23. Далее оцифрованные значения указанного напряжения в виде кодов 24 и 25 передаются в процессор 19, в который также поступают сигнал КС по цепи 11, счетные импульсы Fc по цепи 12 и цифровой код 13 опорного напряжения. На основании перечисленных входных данных в процессоре 19 рассчитывается требуемое значение скважности коммутационного сигнала для следующего тактового интервала, которое в виде цифрового кода 26 поступает на вход шифратора 20, а с его выхода код 27 рассчитанного требуемого значения скважности коммутационного сигнала, преобразованный в формат адресного кода управления мультиплексором выбора коммутационного сигнала, по фронту сигнала КС записывается в параллельный регистр 21, с выхода которого в качестве адресного кода 14 используется для управления мультиплексором выбора коммутационного сигнала.
Применение в блоке 5 интегральных АЦП параллельного типа с запуском по фронту импульса на тактовом входе С позволяет реализовать в процессе преобразования максимальное быстродействие и минимальное «дрожание» апертуры (сводимое к нескольким пикосекундам) а также не требует применения на входе специальных аналоговых устройств «выборки - хранения» (см. У. Титце, К. Шенк. Полупроводниковая схемотехника, 12-е издание, Москва, 2015, том 2, гл. 18, п. 18.9.1). Разрядность выпускаемых промышленностью АЦП такого типа может составлять от 4 до 8 (см. П. Хоровиц, У. Хилл. Искусство схемотехники: В 2-х томах. Пер. с англ. - М: Мир, 1983, - Т. 2, гл. 9, п. 9.22).
При включении устройства формирователем 22 вырабатывается короткий импульс начальной установки (цепь 28), обеспечивающий принудительную установку в регистре 21 начального (нулевого) кода, соответствующего коммутационному сигналу с некоторым заданным начальным значением скважности (например, 50 %), от которого начинается последующая работа устройства.
На фиг. 5 представлена структурная схема формирователя 22, выполненная на аналоговом компараторе 33. Первоначально при появлении масштабированного напряжения на нагрузке (цепь 23) на выходе компаратора (цепь 28) вырабатывается логический единичный сигнал, который сбрасывается в нуль после того, как напряжение на минусовом входе компаратора с задержкой, обеспечиваемой емкостью подключенного к этому входу сглаживающего конденсатора, превысит напряжение на его плюсовом входе.
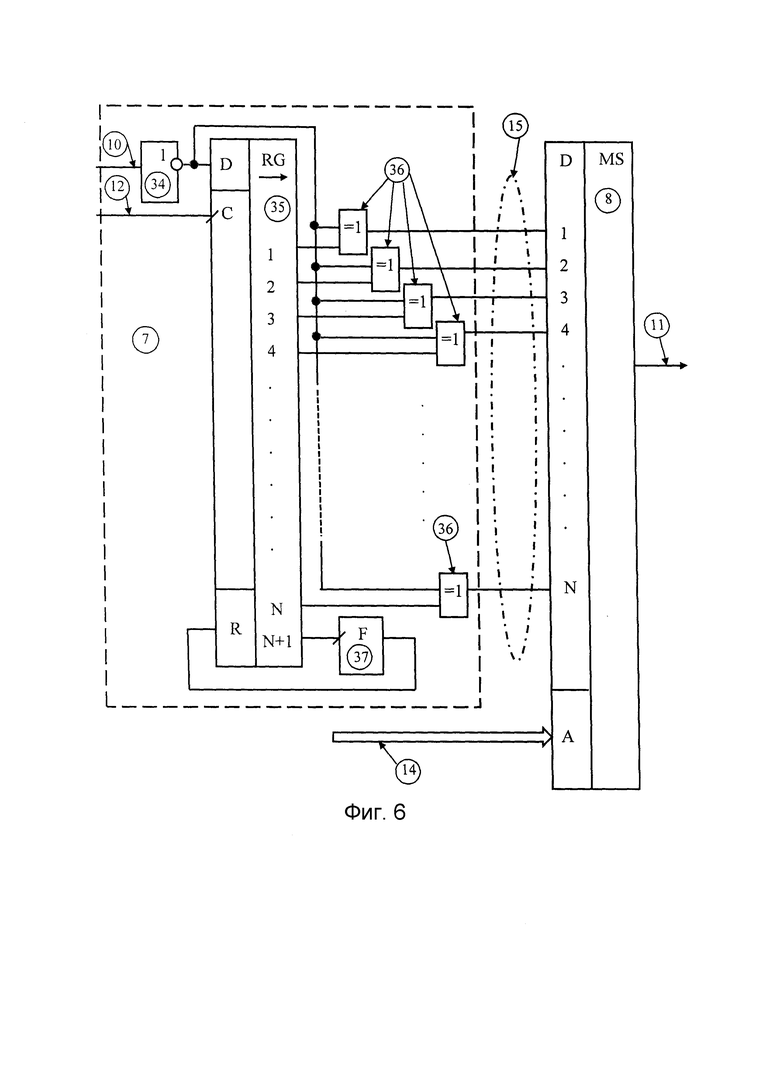
На фиг. 6 представлена структурная схема формирователя 7 ансамбля синхронизированных широтно-импульсных бинарных коммутационных сигналов с подключенным к его выходам мультиплексором 8, с помощью которого производится выбор из ансамбля одного широтно-импульсного бинарного коммутационного сигнала для следующего тактового интервала.
Данная схема включает логический инвертор 34, сдвиговый регистр 35, логические элементы «Исключающее ИЛИ» 36, формирователь 37 импульса сброса.
На схеме также обозначены: цепь 10 отрицательной полярности напряжения на нагрузке (общая шина), цепь 11 управления прерывающим ключом - цепь выбранного широтно-импульсного бинарного коммутационного сигнала (КС), цепь счетных импульсов 12, адресный код 14 управления мультиплексором, цепи 15 ансамбля формируемых синхронизированных широтно-импульсных бинарных коммутационных сигналов.
Работа формирователя 7 происходит следующим образом.
Постоянная логическая единица с выхода инвертора 34 подается на информационный вход сдвигового регистра 35 и на один из входов каждого логического элемента «Исключающее ИЛИ» 36. По фронту каждого импульса 12 логическая единица с информационного D-входа регистра 35 вписывается в его первый разряд, единица из первого разряда переписывается во второй и так далее, пока логическая единица не окажется на выходе (N+1)-го разряда регистра 35. По фронту единичного сигнала (N+1)-го разряда регистра формирователь 37 сформирует короткий импульс, длительностью меньшей, чем длительность периода счетных импульсов 12. Этот короткий импульс обнулит все разряды регистра 35, а по фронту ближайшего по времени счетного импульса 12 произойдет запись логической единицы в первый разряд регистра, по фронту следующего счетного импульса - во второй разряд регистра и так далее до заполнения логической единицей всех его разрядов. Далее процесс повторяется описанным образом.
Логическая единица на выходе каждого из элементов 36 присутствует только тогда, когда на одном из его входов логический ноль, а на другом - единица. Таким образом, в момент фронта обнуляющего импульса формирователя 37, практически совпадающего с моментом записи единицы в (N+1)-й разряд регистра, на выходах всех элементов 36 устанавливаются логические единицы, чем и обеспечивается синхронность формирования ансамбля широтно-импульсных бинарных коммутационных сигналов (цепи 15). При этом длительность каждого из этих сигналов кратна периоду следования счетных импульсов 12 и возрастает от минимальной, равной одному периоду, на выходе верхнего по схеме фиг. 6 логического элемента 36 (сигнал КС1), до максимальной, равной N периодам, на выходе нижнего по схеме фиг. 6 элемента 36 (сигнал КС N).
При использовании описанного принципа формирования ансамбля коммутационных сигналов длительность тактового интервала составляет

где FC - частота счетных импульсов, вырабатываемых задающим генератором. Следовательно, стабильность характеристик формирователя ансамбля коммутационных сигналов и работы устройства в целом определяется уровнем стабильности частоты Fc, который без особой сложности может быть сделан достаточно высоким.
Выбор конкретного коммутационного сигнала осуществляется мультиплексором 8 под управлением адресного кода 14, который привязывается по времени к общему фронту коммутационных сигналов ансамбля в параллельном регистре 21, как показано на схеме фиг. 4. За счет этого исключаются даже очень кратковременные прерывания коммутационного сигнала при смене его в начале каждого тактового интервала на выбираемый коммутационный сигнал требуемой скважности.
Таким образом, полученный технический результат подтверждает достижение цели заявляемого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ импульсной стабилизации постоянного напряжения на нагрузке солнечного генератора | 2019 |
|
RU2721476C1 |
| Многофазный импульсный стабилизатор | 1985 |
|
SU1265743A1 |
| ЦИФРОВОЙ СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2344384C1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Широтно-импульсный модулятор | 1989 |
|
SU1677857A1 |
| Фазометр мгновенных значений | 1981 |
|
SU980015A1 |
| Блок управления многофазным импульсным стабилизатором | 1983 |
|
SU1123085A1 |
| Многофазный импульсный стабилизатор напряжения | 1983 |
|
SU1156032A1 |
| Многофазный импульсный стабилизатор напряжения | 1990 |
|
SU1700545A1 |
| Способ локальной радиотелефонной связи и система для его осуществления | 1991 |
|
SU1831767A3 |

Изобретение относится к области преобразовательной техники и может использоваться, в частности, при создании бортовых систем электроснабжения космических аппаратов. Технический результат - обеспечение устойчивости регулирования напряжения на нагрузке при сохранении его среднего значения и пульсаций в заданных пределах, в том числе в условиях изменяющейся мощности нагрузки. Способ импульсной стабилизации напряжения на нагрузке включает в себя преобразование дестабилизированного постоянного напряжения первичного источника в импульсную форму под воздействием прерывающего широтно-импульсного бинарного коммутационного сигнала постоянной тактовой частоты, низкочастотную фильтрацию полученного импульсного напряжения первичного источника и последующую подачу его на нагрузку, определение рассогласования между напряжением на нагрузке и заданным опорным напряжением. При этом осуществляется непрерывное формирование ансамбля синхронизированных широтно-импульсных бинарных коммутационных сигналов постоянной тактовой частоты с различными значениями скважности, осуществляемый на каждом тактовом интервале выбор из состава формируемого ансамбля одного коммутационного сигнала, обладающего требуемой скважностью, значение которой определяется путем последовательно реализуемых в смежном предшествующем тактовом интервале: измерений мгновенных значений напряжения на нагрузке в моменты фронта и среза коммутационного сигнала; измерения скважности коммутационного сигнала; определения среднего на тактовом интервале значения напряжения на нагрузке на основе измеренных мгновенных значений напряжения на нагрузке и скважности коммутационного сигнала; определения требуемого значения скважности коммутационного сигнала, компенсирующего рассогласование между средним на данном тактовом интервале значением напряжения на нагрузке и заданным опорным напряжением. 6 ил.
Способ импульсной стабилизации напряжения на нагрузке, включающий преобразование нестабилизированного постоянного напряжения первичного источника в импульсную форму под воздействием прерывающего широтно-импульсного бинарного коммутационного сигнала постоянной тактовой частоты, низкочастотную фильтрацию полученного импульсного напряжения первичного источника и последующую подачу его на нагрузку, а также определение рассогласования между напряжением на нагрузке и заданным опорным напряжением,
отличающийся тем, что дополнительно включает:
- непрерывное формирование ансамбля синхронизированных широтно-импульсных бинарных коммутационных сигналов постоянной тактовой частоты с различными значениями скважности,
- осуществляемый на каждом тактовом интервале выбор из состава формируемого ансамбля одного коммутационного сигнала, обладающего требуемой скважностью, значение которой определяется путем последовательно реализуемых в смежном предшествующем тактовом интервале:
- измерений мгновенных значений напряжения на нагрузке в моменты фронта и среза коммутационного сигнала,
- измерения скважности коммутационного сигнала,
- определения среднего на тактовом интервале значения напряжения на нагрузке на основе измеренных мгновенных значений напряжения на нагрузке и скважности коммутационного сигнала,
- определения требуемого значения скважности коммутационного сигнала, компенсирующего рассогласование между средним на данном тактовом интервале значением напряжения на нагрузке и заданным опорным напряжением.
| US 5170333 A, 12.08.1992 | |||
| Стабилизирующий преобразователь напряжения постоянного тока | 1987 |
|
SU1467701A1 |
| Ключевой стабилизатор напряжения | 1979 |
|
SU851368A1 |
| СПОСОБ ПОЛУЧЕНИЯ ДИХЛОРПРОИЗВОДНЫХ АНТРАХИНОНДИАЗОЛОВ | 0 |
|
SU202966A1 |
| US 9252661 B2, 02.02.2016 | |||
| ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 0 |
|
SU315167A1 |

