Ссылка на родственную заявку
Данная заявка испрашивает приоритет по заявке на патент Италии №102019000014874, поданной 20 августа 2019 года, содержание которой полностью включено в настоящий документ посредством ссылки.
Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к способу и системе для управления грузовым автомобилем промышленного назначения во время выполнения операции по обработке поверхности дорожного полотна.
Предшествующий уровень техники настоящего изобретения
Известны грузовые автомобили промышленного назначения, выполненные с возможностью нанесения на поверхность дорожного полотна продуктов, предохраняющих от замерзания (например, как правило, хлоридов, кристаллов соли, солевых растворов или флюсов), с целью предотвращения или уменьшения возможности образования льда и покрытия снегом самого дорожного полотна; и/или для нанесения абразивных продуктов, таких как песок или гравий, с возможностью их вкрапления в слой льда, возможно покрывающего дорожное полотно, для улучшения характеристик сцепления с таким полотном.
Также хорошо известны плужные снегоочистители промышленного назначения, выполненные с возможностью механической уборки снега и/или льда с поверхности дорожного полотна для повышения безопасности участников дорожного движения. Транспортные средства этого типа содержат снегоуборочный плуг, приводимый в действие блоком управления. Плуг состоит из тела качения и съемного лемеха (или скрепера), прикрепленного на постоянной основе к нижней части тела качения и отходящего назад для удаления, по меньшей мере, некоторого количества снега/льда с поверхности дорожного полотна. Хорошо известны телескопические плуги, выполненные с возможностью выдвижения в боковом направлении на разное расстояние, перпендикулярно направлению прямого движения грузового автомобиля промышленного назначения. Телескопические плуги могут регулироваться водителем снегоуборочной машины, который варьирует их боковое выдвижение с тем, чтобы при движении по маршруту можно было избежать столкновения с каким-либо препятствием или припаркованным автомобилем или миновать его.
Одно и то же транспортное средство может быть одновременно рассчитано как на нанесение продуктов, предохраняющих от замерзания, так и на уборку снега.
В частности, в транспортных средствах указанных типов операции по нанесению продуктов и уборке снега выполняются под управлением электронных устройств управления, выполненных с возможностью регулирования заданным образом параметров нанесения продукта (например, количества наносимого продукта на квадратный метр, ширины и симметричности нанесения продукта и т.п.) и/или параметров плуга (например, его выдвижения в боковом направлении, высоты от поверхности земли, плавающего положения, степени опускания и т.п.).
Внутри транспортного средства предусмотрен блок интерфейса пользователя, с помощью которого выбираются наиболее подходящие параметры для пути движения, прокладываемого самим транспортным средством.
Если речь идет о транспортном средстве для нанесения продуктов, то хорошо известны способы, в которых после выбора программы нанесения продукта, подходящей для погодных и морфологических условий на выбранном пути движения, соответствующие параметры вводятся в действие вне зависимости от изменений морфологических условий, условий окружающей среды и дорожной обстановки на пути движения. Следовательно, в случае изменения этих условий параметры нанесения продукта больше не являются оптимальными, и они должны быть изменены вручную водителем, управляющим транспортным средством, который должен оценить конкретную ситуацию и соответствующим образом скорректировать параметры нанесения продукта.
Например, изменения дорожных условий могут иметь место тогда, когда транспортное средство сталкивается с препятствием на проезжей части или с припаркованным автомобилем или другим транспортным средством.
В таких условиях водитель, отвечающий за управление грузовым автомобилем промышленного назначения, должен уменьшить или изменить ширину бокового нанесения продуктов, предохраняющих от замерзания, во избежание нанесения повреждения припаркованному автомобилю.
Аналогичным образом водитель должен изменить параметры плуга, в частности, его боковое выдвижение и рабочий угол, во избежание контакта с автомобилем, припаркованным или приближающимся с противоположной стороны.
В некоторых случаях оценка водителем таких критических ситуаций может оказаться неверной. В других случаях водитель может не осознавать реальной возможности нанесения повреждения автомобилю, припаркованному на обочине. Могут иметь место и другие непредвиденные ситуации.
Следовательно, существует потребность в транспортных средствах, снабженных устройствами для автоматической проверки дорожных условий, в которых они работают, чтобы можно было автоматически регулировать параметры обработки дорожного полотна всякий раз, когда изменяются условия по пути движения, вдоль которого осуществляется обработка, в том числе предотвращать ошибки, обусловленные сложными эксплуатационными условиями и/или промахами водителя.
Краткое раскрытие настоящего изобретения
Цель настоящего изобретения заключается в том, чтобы предложить способ управления грузовым автомобилем промышленного назначения во время выполнения операции по обработке поверхности дорожного полотна и систему для управления грузовым автомобилем промышленного назначения, которые позволили бы устранить, по меньшей мере, частично недостатки предшествующего уровня техники.
Согласно настоящему изобретению предложен способ управления грузовым автомобилем промышленного назначения и система для управления грузовым автомобилем промышленного назначения по прилагаемой формуле изобретения.
Краткое описание фигур
Для обеспечения лучшего понимания настоящего изобретения ниже будет описан один из предпочтительных вариантов его осуществления, раскрытый на примере, который не носит ограничительного характера, в привязке к прилагаемым чертежам, где:
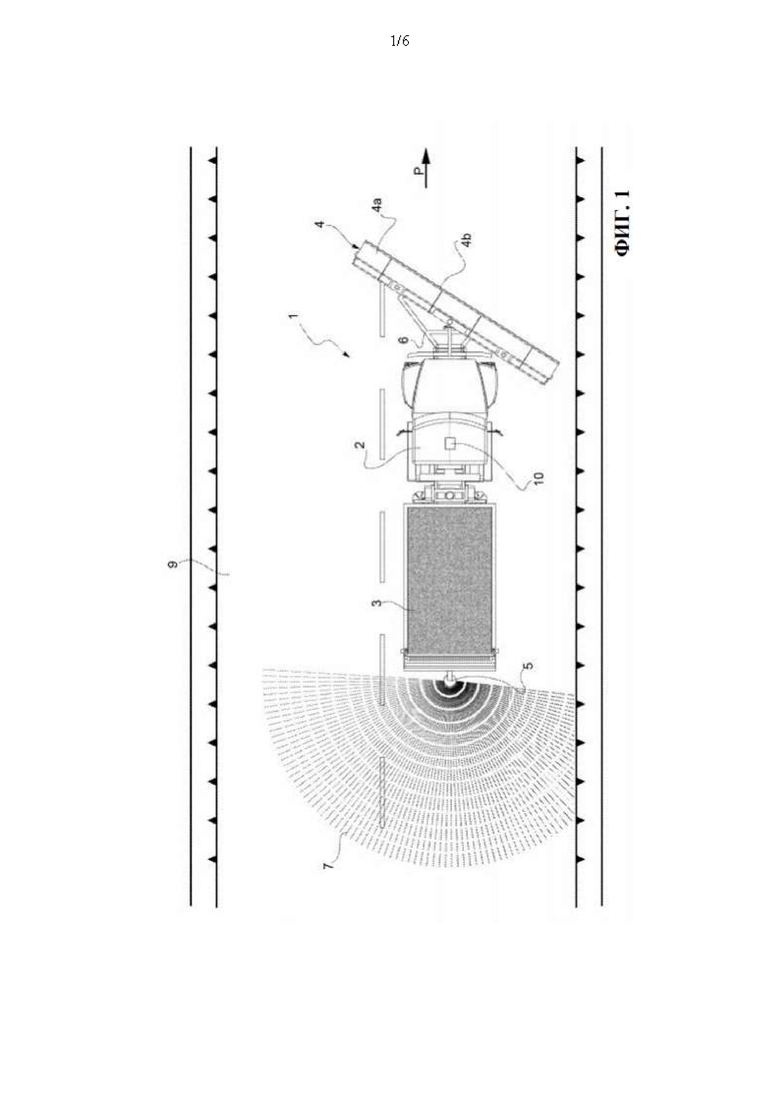
На фиг. 1 схематически показано транспортное средство для нанесения продуктов на поверхность дорожного полотна и удаления снега/льда;
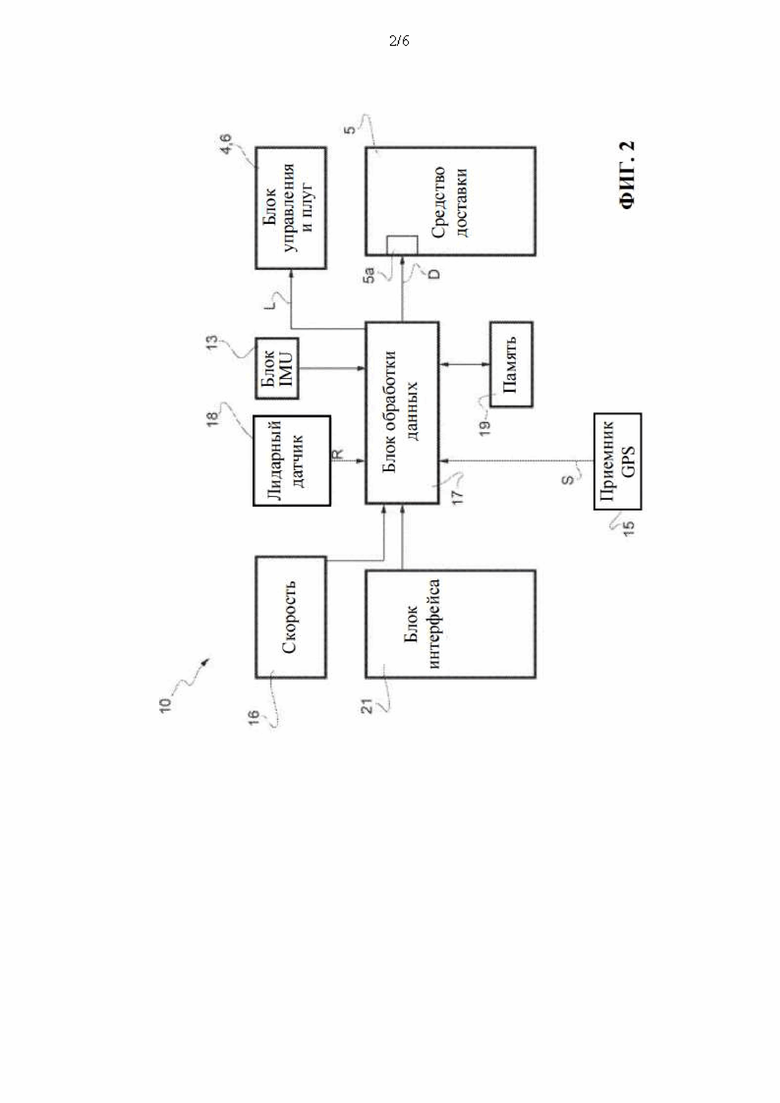
На фиг. 2 представлена блок-схема, иллюстрирующая систему управления операциями по нанесению продуктов и удалению снега/льда транспортным средством, показанным на фиг. 1;
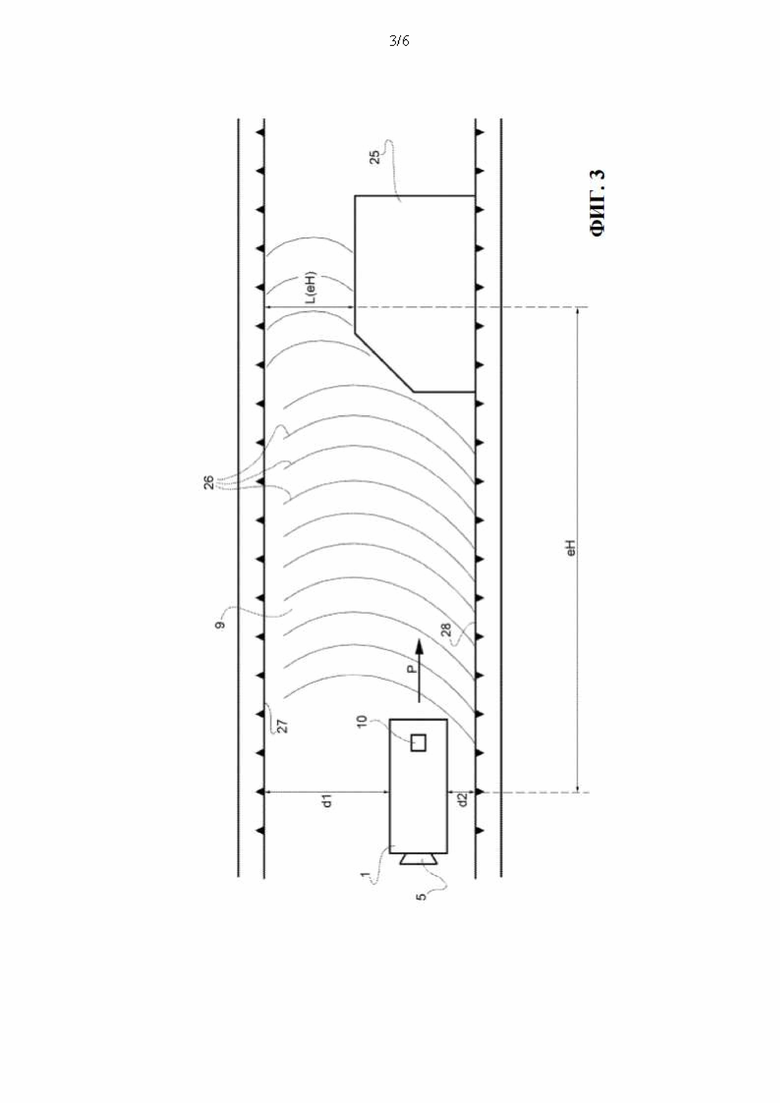
На фиг. 3 представлено схематическое изображение транспортного средства, показанного на фиг. 1, которое приближается к препятствию;
На фиг. 4 представлена блок-схема, иллюстрирующая функциональные модули, реализованные в системе управления, показанной на фиг. 2;
На фиг. 5 представлена прямоугольная система координат, иллюстрирующая способ вычисления географических координат препятствия, показанного на фиг. 3, по известным координатам географического положения транспортного средства и по направлению его движения вперед; а
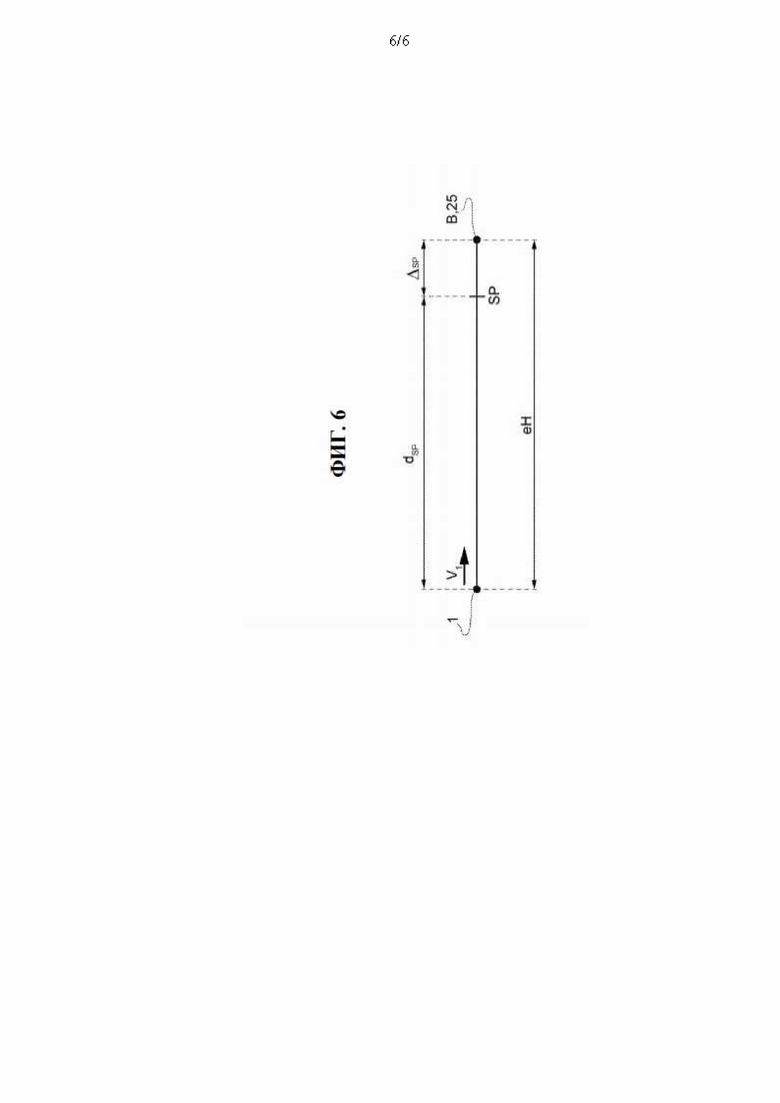
На фиг. 6 представлено схематическое изображение, иллюстрирующее рассчитанный путь между транспортным средством и препятствием, показанным на фиг. 3, с указанием на начальную точку для выполнения операций по нанесению продукта и удалению снега/льда с учетом задержек механической реализации.
Лучший вариант осуществления настоящего изобретения
На фиг. 1 показано транспортное средство, обозначенное, в целом, позицией 1, в частности, грузовой автомобиль промышленного назначения, снабженный тягачом 2, бункером 3 для хранения одного или нескольких продуктов 7 (твердых или жидких) для обработки поверхности 9 дорожного полотна и средством 5 доставки, которое прикреплено, например, к задней части транспортного средства 1 и выполнено с возможностью нанесения продукта 7 на поверхность 9 дорожного полотна на пути Р, по которому движется транспортное средство 1. В частности, в проиллюстрированном варианте осуществления настоящего изобретения транспортное средство 1 выполнено с возможностью доставки продуктов, предохраняющих от замерзания (например, расплавляющих или абразивных хлоридов, как жидких, так и твердых).
Средство 5 доставки регулируется автоматически для выполнения одной или нескольких следующих операций:
• дозированной подачи твердых продуктов (NaCl, CaCl, MnCl, абразивов и т.п.);
• дозированной подачи жидких продуктов (NaCl, CaCl, MnCl, особых реагентов и т.п.).
Режим нанесения может определяться одним или несколькими параметрами нанесения, включая:
• количество флюса или абразива или жидкого продукта, наносимого на каждый квадратный метр;
• ширину нанесения;
• симметричность нанесения (вбок или по центру относительно оси транспортного средства);
• процентное увлажнение наносимого материала.
Наносимый продукт 7 выбирается сообразно обстоятельствам в зависимости от условий окружающей среды, в которой эксплуатируется транспортное средство 1. Например, продукт 7 может быть выбран из следующего перечня: гранулированные абразивные продукты (такие как гравий или песок); жидкие продукты, предохраняющих от замерзания (например, как правило, солевые растворы или разжижающие растворы), выполненные с возможностью предотвращения (или уменьшения) возможности образования льда и/или покрытия снегом поверхности дорожного полотна.
Транспортное средство 1 также содержит снегоуборочный плуг 4, снабженный опорным кронштейном и узлом крепления плуга 4 к тягачу 2, и блок 6 управления плугом, тип которого известен, и который частично показан на чертеже. Плуг 4 состоит известным образом из тела 4а качения и съемного лемеха или скрепера 4b, прикрепленного на постоянной основе к нижней части тела 4а качения и отходящего назад для удаления, по меньшей мере, некоторого количества снега/льда с поверхности 9 дорожного полотна. Лемех 4b выполнен из металла или полимерного материала.
Блок 6 управления регулируется автоматически для выполнения одной или нескольких следующих операций:
• поднятия и опускания плуга 4 относительно поверхности 9 дорожного полотна;
• вращения самого плута 4 вокруг, по меньшей мере, одной горизонтальной оси коррекции и/или вокруг вертикальной оси;
• коррекции давления скрепера на грунт;
• коррекции угла наклона скрепера (чем больше наклон, тем больше проникание);
• коррекции ролика и верхней защиты (она должна быть полностью открыта, когда идет мокрый снег, чтобы его можно было удалять без приложения дополнительных усилий; и она должна быть полностью закрыта, когда идет сухой снег, чтобы можно было контролировать порошковатый снег и не допускать его рассеивания по лобовому стеклу).
Транспортное средство 1 также снабжено электронным устройством или системой 10 управления (показана только схематически), выполненной с возможностью управления средством 5 доставки для коррекции известным образом количества подаваемого продукта и режимов дозированной подачи в зависимости от ряда параметров нанесения. Электронная система 10 управления также выполнена с возможностью управления снегоуборочным плугом 4 с активацией блока 6 управления плуга 4.
Как показано на фиг. 2, электронная система 10 управления содержит: GPS- или GNSS-приемник 15, предназначенный для генерирования на выходе сигнала S, соотносящегося с положением и/или прямым направлением движения транспортного средства 1 (ниже по тексту прямая ссылка будет дана только на систему GPS без какой-либо потери общности); инерциальный измерительный блок (IMU) 13, функция которого состоит в том, чтобы детектировать ускорения (например, при перестроении) транспортного средства 1; блок 17 обработки данных, работающий с GPS-приемником 15; детектор 16 скорости, предназначенный для детектирования скорости движения транспортного средства 1; и память, взаимодействующую с блоком 17 обработки данных. Блок 13 IMU и детектор 16 скорости являются необязательными компонентами, а соответствующие данные могут быть получены напрямую из системы GPS/GNSS или с использованием других систем.
Данные, принимаемые со спутниковой системы 15 позиционирования GPS/GNSS, с блока 13 IMU и детектора 16 скорости, передаются и обрабатываются блоком 17 обработки данных для определения одного или нескольких следующих параметров: положения, направления, мгновенной скорости, угловой скорости и углового ускорения транспортного средства 1. Данные о положении регулярно обновляются, например, с шагом в 1 или несколько Гц.
Детектор 16 скорости обычно предусматривается в транспортных средствах 1 известного типа во время их проектирования изготовителем, и он может включать в себя преобразователь скорости, который преобразует механическую величину в электрическую величину (например, импульсы напряжения), например, динамо-тахометр или счетчик оборотов, который преобразует количество оборотов вращающегося тела (например, колес) в напряжение (или в импульсы напряжения).
Блок 6 управления управляется блоком 17 обработки данных в зависимости от одного или нескольких рабочих параметров, указанных выше.
В необязательном варианте электронная система 10 управления содержит блок 21 интерфейса, взаимодействующий с блоком 17 обработки данных и выполненный с возможностью его использования оператором (не показан) в салоне транспортного средства 1 для контроля и управления операциями по нанесению соли и уборке снега и/или для детектирования любых нештатных ситуаций или сигналов тревоги. Блок 21 интерфейса может быть также интегрирован в блок 17 обработки данных.
Блок 17 обработки данных выполнен с возможностью передачи управляющих сигналов D на интерфейс 5А средства 5 доставки для регулирования количества распределяемой соли и управления способами ее нанесения. Например, посредством управляющих сигналов D может корректироваться (известным образом) количество соли, наносимой на квадратный метр; ширина нанесения; симметричность нанесения (вбок, по центру), процентное увлажнение наносимой соли и прочие параметры.
Блок 17 обработки данных также выполнен с возможностью передачи управляющих сигналов L в блок 6 управления плуга 4 для регулирования - известным образом - рабочих параметров (ширины телескопического плуга, ориентации плуга относительно пути Р, давления плуга на грунт, угла наклона, рабочего угла относительно оси дороги и т.п.).
Электронная система 10 управления также содержит удаленный датчик 18 (например, лидарный датчик, радар и т.п.), функционально связанный с блоком 17 обработки данных и выполненный с возможностью сканирования пути Р в направлении движения транспортного средства 1 с целью детектирования разных типов препятствий/элементов, находящихся на пути Р движения (например, препятствий на проезжей части, припаркованных автомобилей, барьеров, пешеходных переходов и т.п.), и с возможностью генерирования сигнала R, который содержит данные, относящиеся к препятствиям/элементам, которые обнаруживаются датчиком 18.
Сигнал R подается в блок 17 обработки данных (и может быть сохранен в памяти 19) для дополнительной обработки с целью получения информации, относящейся к пути Р. Такая информация включает в себя, помимо прочего, один или несколько следующих видов данных:
• ширину дороги и/или проезжей части или полосы для транспортного средства 1 на постоянном расстоянии (известном как «электронный горизонт»);
• расстояние до транспортного средства 1 от левой бровки проезжей части или дороги относительно направления движения транспортного средства 1;
• расстояние до транспортного средства 1 от правой бровки проезжей части или дороги относительно направления движения транспортного средства 1;
• расстояние между транспортным средством 1 и детектируемым препятствием/элементом;
• расстояние между транспортным средством 1 и другим транспортным средством, которое движется в противоположной полосе.
Этот набор данных определяет конкретные условия окружающей среды на пути Р, где находится работающее транспортное средство 1.
Параметры нанесения продукта и работы плуга 4, относящиеся к пути Р, по которому движется транспортное средство 1, задаются автоматически в зависимости от указанной информации, полученной после обработки сигнала R, переданного датчиком 18. Набор всех возможных параметров нанесения продукта и работы плуга 4 сохраняются в базе данных в памяти 19 (или в иной памяти, не показанной, но приспособленной для этой цели и взаимодействующей с блоком 17 обработки данных).
Набор параметров нанесения продукта и работы плуга 4 определяет способы нанесения соли/уборки снега, адаптированные к соответствующим морфологическим условиям на дороге и/или наличию препятствий или иных элементов, указанных выше.
Данные, отображающие эти способы нанесения/уборки снега, хранятся в памяти 19, которая сообщается с блоком 17 обработки данных для генерирования управляющего сигнала D средства 5 доставки.
Согласно настоящему изобретению разные способы нанесения выбираются автоматически в зависимости от конкретных условий на пути Р движения, на котором находится транспортное средство 1 во время работы. Аналогичным образом разные способы коррекции блока 6 управления плуга 4 также выбираются автоматически на основании конкретных условий на пути Р движения, на котором находится транспортное средство 1 во время работы.
Эти условия включают в себя (помимо прочего): наличие одного или нескольких препятствий на пути Р движения; наличие автомобилей или транспортных средств иных типов на пути Р движения, например, припаркованных с одного краю проезжей части; наличие автомобилей или транспортных средств иных типов на пути Р движения, двигающихся в направлении транспортного средства 1 по противоположной полосе; наличие барьеров на пути Р движения; и наличие пешеходных переходов на проезжей части.
В памяти 19 также хранится модель окружающей среды, которая на основании данных, собранных датчиком 18, предоставляет - в режиме реального времени - данные о ширине дороги и/или одной или обеих проезжих частей на постоянном расстоянии, называемом «электронным горизонтом» (еН).
Термин «электронный горизонт» обозначает расстояние (конфигурируемое), в пределах которого система детектирования (лидар) может предоставлять надежные данные, относящиеся к дорогам, перекресткам, дорожным объектам, геометрическим параметрам дорог, специальным данным, характеризующим дорогу в системе дорожной классификации, и т.п.). По мере увеличения этого расстояния разрешение и, соответственно, точность снижается. Иначе говоря, это расстояние, на котором датчик может получать данные с небольшой погрешностью или с погрешностью, считающейся незначительной с точки зрения конкретного применения. Электронный горизонт обычно составляет менее 250 метров.
Кроме того, модель окружающей среды предоставляет данные о расстоянии, на которое транспортное средство 1 отстоит от левой бровки (расстояние d1) и от правой бровки (расстояние d2) проезжей части или дороги, а также об общей ширине дороги (dTOT). Модель окружающей среды способна идентифицировать разные типы препятствий: припаркованные автомобили, барьеры, пешеходные переходы и тому подобное в различных климатических условиях.
Модели окружающей среды, приспособленные для этой цели, известны из предшествующего уровня техники, и сами по себе они не составляют предмет настоящего изобретения. В частности, известно множество моделей и алгоритмов для извлечения данных об обочине дороги («извлечение данных об обочине дороги»), которые могут быть использованы в контексте настоящего изобретения.
Рассмотрим, например, патент US 6405128 для получения большего объема информации, относящейся к известным моделям окружающей среды, которые могут быть использованы в контексте настоящего изобретения.
См. также работу Kaijin Qiu с соавторами под названием «Быстродействующий и устойчивый алгоритм для извлечения данных об обочинах дороги из данных лидара», Международный архив фотограмметрии, дистанционного зондирования и пространственной информации, Том XLI-B5, XXIII конгресс ISPR (Международное общество фотограмметрии и дистанционного зондирования), 12-19 июля 2016 года, Прага, Чешская Республика.
Однако доступны для приобретения модели окружающей среды, реализуемые с использованием компьютерных программ и выполненные с возможностью предоставления указанной информации.
Следует отметить, что в разных вариантах осуществления настоящего изобретения расстояние до транспортного средства 1 от левой бровки (d1) и от правой бровки (d2) дороги или проезжей части может быть получено даже при отсутствии программного обеспечения, а указанная модель окружающей среды может быть реализована, например, с использованием датчиков приближения или положения или лидарного датчика или радара известного типа (например, уже используемых на транспортных средствах, к примеру, датчиков парковки).
На фиг. 3 представлено графическое изображение указанных параметров (еН, d1, d2) в зависимости от данных, полученных удаленным датчиком 18. На фиг. 1 представлено схематическое изображение, иллюстрирующее транспортное средство 1, приближающееся к препятствию 25 на проезжей части. Левая бровка 27 дороги (или проезжей части) и правая бровка 28 дороги (или проезжей части) определяются, например, по соответствующему отбойнику или иному элементу подобного рода (например, по изменению состояния поверхности, например, асфальт - трава, или по горизонтальной маркировке границ проезжей части). Удаленный датчик 18 испускает сигнал 26 в направлении движения транспортного средства 1 и получает эхо-сигнал (не показан) для расчета минимальной ширины L(eH) на расстоянии, заданном электронным горизонтом еН. На фиг. 3 ширина L(eH), в присутствии препятствия 25, представляет собой расстояние между препятствием 25 и левой бровкой 27 дороги, которое соответствует ширине (перпендикулярно направлению Р движения) той части дороги, по которой должно пройти транспортное средство 1, чтобы обойти препятствие 25.
Блок 17 обработки данных реализует (путем исполнения программных команд, хранящихся в памяти 19) функциональные возможности автоматического выбора способов нанесения, исходя из конкретных условий на пути Р движения, где находится работающее транспортное средство 1. Эти функциональные возможности схематически проиллюстрированы на фиг. 4 с разбивкой на функциональные модули.
В частности, блок 17 обработки данных реализует функции приемного модуля 120 входных параметров, выполненного с возможностью получения: данных, генерируемых моделью окружающей среды (модуль 110 модели окружающей среды на фиг. 4); заданных параметров нанесения (модуль 112 нанесения на фиг. 4); заданных рабочих параметров плуга 4 (модуль 114 плуга на фиг. 4); данных о положении, генерируемых GPS-приемником 15; данных о скорости, генерируемых сигналом тахометра; и сигнала ускорения, детектируемого инерциальными датчиками (GPS-модуль 116 на фиг. 4 и блок 13 IMU).
В частности, согласно одному из вариантов осуществления настоящего изобретения приемный модуль 120 получает значения еН, d1, d2 и L(eH) из модуля 110 модели окружающей среды; процентные значения дозировки и увлажнения продукта из модуля 112 нанесения; значения выдвижения, высоты, качения, опускания под давлением и отклонения плуга 4 из модуля 114 плуга; индикацию положения из GPS-модуля 116; и скорость движения транспортного средства 1 от тахометра.
Приемный модуль 120 получает указанные данные в качестве входных данных и реализует функцию нормализации (включая операции по удалению/фильтрации случайных помех в детектируемой последовательности, например, из-за наличия ошибки в GPS-данных, превышающей определенное пороговое значение, или из-за отсутствия таковых; или вследствие потери сигнала тахометра; и т.п.). Кроме того, приемный модуль 120 после выполнения функций нормализации данных реализует функции архивации данных (например, путем сохранения нормализованных данных в буфере памяти для их последующей обработки: например, сохраняются последние положения «N» GPS, признанные корректными или нормализованными, где величина «N» выбирается без ограничений в зависимости от доступной памяти).
Эти данные записываются в область памяти 19 и становятся доступными для дополнительных функциональных модулей.
К примеру, приемный модуль 120 получает в качестве входных данных следующие данные:
ID_POINT (ТОЧКА ИДЕНТИФИКАЦИИ): формируется по коду (например, инкрементальному буквенно-цифровому коду), который идентифицирует данные, полученные в определенный момент времени в определенном географическом положении, с целью обеспечения сохранности статистических данных;
LATITUDE, LONGITUDE (ШИРОТА, ДОЛГОТА): географические координаты (например, в градусах, измеряемых GPS-приемником 15) точки, в которой происходит сбор информации;
NUM_PULSES (КОЛИЧЕСТВО ИМПУЛЬСОВ): количество импульсов тахометра, сгенерированных с начала последнего сбора данных (соответствующее непосредственно предшествующей точке «ID_POINT»), причем количество импульсов, подсчитанных за единицу времени, пропорционально скорости, детектированной во время движения транспортного средства 1; и
ANGLE (УГОЛ): направление движения транспортного средства 1 (угол между направлением движения транспортного средства 1, заданным вектором скорости, и направлением на истинный север в точке детектирования).
Входные параметры могут загружаться, например, в виде таблицы (матрицы), где каждая строка идентифицирует точку «ID_POINT», а каждая колонка относится к значению других параметров (LATITUDE, LONGITUDE, NUM_PULSES, ANGLE) для каждой точки «ID_POINT» с тем, чтобы его можно было без труда использовать в ходе последующей обработки.
Блок 17 обработки данных реализует дополнительные функции решающего модуля 130, выполненного с возможностью получения входных данных, генерируемых приемным модулем 120.
В решающем модуле 130 нормализованные данные, полученные приемным модулем 120 в качестве входных данных, сравниваются со статистическими данными, хранящимися в памяти 19. Если эта операция подтверждает, что между данными, предоставленными ранее модулем 110 модели окружающей среды, и текущими данными (L(eH), d1, d2) нет никакой разницы, то приемный модуль 120 получает новые данные из модуля 110 модели окружающей среды, который генерирует обновленные данные. Эта ситуация соответствует случаю, когда транспортное средство 1 стоит на месте или движется по пути, на котором нет никаких препятствий.
Если в одном из наблюдаемых значений детектируется изменение (например, изменение в L(eH), d1, d2 вследствие сужения проезжей части или дороги по причине наличия препятствия, включая припаркованные автомобили, барьеры или автомобили, приближающиеся с противоположной стороны, или из-за маневра водителя, такого как, например, смена полосы), то решающий модуль 130 активирует функции перерасчета параметров нанесения и плуга.
Решающий модуль 130 работает с последними данными, зарегистрированными (во временной последовательности) приемным модулем 120 в таблице, указанной выше, и сравнивает значение параметров L(eH), d1 и d2 с соответствующими значениями в соответствующей точке в непосредственно предшествующий момент времени. Если, по меньшей мере, один из этих параметров изменяется, то должно быть рассчитано положение географической точки (целевого ориентира), в которой должны быть изменены параметры нанесения продукта/выдвижения плуга 4. Предусмотрено два сценария:
• Сценарий 1) изменения расстояния d1/d2 от левой/правой бровки; т.е. транспортное средство 1 совершило маневр, такой как, например, смена полосы. В этом случае решающий модуль 130 фиксирует изменение параметра в момент ts (который может конфигурироваться) и ожидает стабилизации нового состояния. Когда новое значение становится постоянным во временном окне ts наблюдения, сразу же осуществляется переход к расчету новых параметров нанесения (модуль 150) и выдвижения и/или ориентации плуга 4 (модуль 140) для их непосредственной реализации.
• Сценарий 2) изменения ширины нанесения; т.е. было детектировано препятствие, приводящее к уменьшению ширины дороги, или же дорога расширяется за счет перехода от двух полос к трем полосам. В этом случае, как это показано на фиг. 5, имея координаты начальной точки А или данные о текущем положении транспортного средства, указанные данные об угле (ANGLE) (позиция а на фиг. 5) и расстояние (еН), можно рассчитать координаты точки В, в которой было детектировано препятствие, по следующим тригонометрическим формулам: Lat1=eH-sin(a), Long1=еН-cos(a).
После этого осуществляется переход к расчету новых параметров нанесения и выдвижения плуга, которые будут реализованы в точке В (или до этой точки с учетом задержек активации).
Как показано на фиг. 4, решающий модуль 130 выполнен с возможностью реализации модулей 140, 150 и 160 в зависимости от результата решения.
Модуль 140 выполнен с возможностью расчета выдвижения и, в необязательном варианте, ориентации телескопического плуга 4, исходя из ширины L(eH), детектированной на расстоянии электронного горизонта еН, и детектированного положения транспортного средства 1 относительно левой и правой бровок 27 и 28 проезжей части или дороги, по которой движется транспортное средство 1. Расчет выдвижения плуга 4 осуществляется таким образом, что боковое выдвижение (и, в необязательном варианте, ориентация плуга 4) уменьшается или изменяется на величину, достаточную для того, чтобы обеспечить возможность прохождения транспортного средства 1 сбоку от препятствия (т.е. между препятствием 25 и левой бровкой 27 на фиг. 3) без нанесения повреждений препятствию и плугу 4, в частности, вследствие нежелательного соударения плуга 4 и препятствия.
Вышеизложенное также применимо к случаю, когда грузовой автомобиль 1 промышленного назначения совершает маневр изменения направления движения в условиях отсутствия препятствий. Изменение направления движения фактически приводит к изменению расстояния до транспортного средства 1 от левой и правой бровок дороги и требует соответствующего изменения бокового выдвижения плуга 4 или изменения ориентации плуга 4. По существу может потребоваться уменьшение степени выдвижения плуга 4 лишь у одной из бровок дороги (ближайшей к грузовому автомобилю 1 промышленного назначения).
Аналогичным образом нанесение продукта на поверхность дорожного полотна конфигурируется таким образом, что боковое нанесение не влияет на препятствие 25 или левую бровку 27 дороги.
Например, если величина L(eH) обозначает расстояние между препятствием 25 и левой бровкой 27, то выдвижение плуга 4 уменьшается на величину, которая меньше величины L(eH), а средство 5 доставки регулируется таким образом, что боковые отклонения слева и справа составляют менее L(eH)/2.
Модуль 150 выполнен с возможностью расчета ширины нанесения твердого/жидкого продукта, исходя из ширины L(eH), детектированной на расстоянии электронного горизонта еН, и относительного положения транспортного средства 1 относительно левой и правой бровок 27 и 28 проезжей части или дороги, по которой движется транспортное средство 1. Расчет ширины нанесения продукта выполняется таким образом, что ширина нанесения уменьшается или изменяется на величину, достаточную для того, чтобы обеспечить возможность прохождения транспортного средства 1 сбоку от препятствия (т.е. между препятствием 25 и левой бровкой 27 на фиг. 3) без нанесения повреждений препятствию или его загрязнения, в частности, вследствие нежелательного соприкосновения наносимого продукта с препятствием. Таким образом, предотвращается напрасное расходование наносимого продукта, поскольку он не наносится там, где это не нужно.
Модуль 160 выполнен с возможностью расчета асимметрии нанесения, исходя из ширины L(eH), детектированной на расстоянии электронного горизонта еН, и относительного положения транспортного средства 1 относительно левой и правой бровок 27 и 28 проезжей части или дороги, по которой движется транспортное средство 1. Асимметрия нанесения учитывает тот факт, что при наличии препятствия исключительно с одной стороны транспортного средства 1 (например, справа, как это показано на фиг. 3) ширина нанесения может быть уменьшена только с правой стороны, оставаясь при этом неизменной (или уменьшенной на меньшее значение) с левой стороны.
Это также применимо к случаю, когда грузовой автомобиль 1 промышленного назначения совершает маневр изменения направления движения в условиях отсутствия препятствий. Изменение направления движения фактически приводит к изменению расстояния до грузового автомобиля 1 промышленного назначения от левой и правой бровок дороги и требует соответствующего изменения области нанесения продукта 7. По существу асимметричное нанесение продукта 7 может потребоваться для достижения обеих бровок из числа правой бровки и левой бровки дороги таким образом, чтобы не пропустить одну или другую. Нанесение продукта 7 будет симметричным только в том случае, если грузовой автомобиль 1 промышленного назначения движется по центру дороги на равном расстоянии от левой и правой бровок.
В двух сценариях, описанных выше, расчеты, выполняемые модулями 140-160, могут отличаться друг от друга.
Для сценария 1) значение левой асимметрии А1 будет задано расстоянием от левой бровки (A1=d1), тогда как значение правой асимметрии будет задано расстоянием от правой бровки (А2=d2), а реализация будет активирована незамедлительно по окончании периода ts наблюдения решающим модулем 130.
Для сценария 2) текущее значение ширины L(eH)' на расстоянии электронного горизонта будет задано по последней ширине, детектированной датчиком 18 на электронном горизонте еН: L(eH)'=L(eH); а правая асимметрия А2 и левая асимметрия А1 будут составлять половину значения ширины L(eH)', соответственно: A1=А2=L(eH)'/2.
Как также показано на фиг. 4, блок 17 обработки данных реализует дополнительные функции модуля 170 расчета уставок, выполненного с возможностью расчета времени, потребного для завершения механической реализации от текущего географического положения до нового положения (на расстоянии электронного горизонта еН), исходя из известных задержек средства 5 доставки и блока 6 управления. Данные, генерируемые на выходе этим модулем, используются для определения «уставки», заданной максимальным временем из числа всех рассчитанных моментов времени в зависимости от значений скорости и ускорения транспортного средства 1. В этом контексте «уставка» времени представляет собой момент времени, когда передается команда на изменение параметров нанесения/выдвижения плуга с тем, чтобы с учетом задержки механической реализации и скорости движения транспортного средства 1 относительно препятствия операция была завершена по достижении идентифицированного препятствия.
Модуль 170 расчета уставок принимает на входе данные из блока 180, идентифицирующие максимальное время механической реализации, необходимое транспортному средству 1, чтобы изменить параметры выдвижения плуга 4 и нанесения продукта в средстве 5 доставки. Иначе говоря, блок 180 идентифицирует задержки между передачей команды на реализацию и завершением механической реализации средством 5 доставки и блоком 6 управления плуга 4. Данные блока 180 сохраняются, например, в памяти 19.
Модуль 170 расчета уставок также принимает на входе текущее значение скорости движения транспортного средства 1 и расстояние до препятствия.
На основании полученной таким образом информации модуль 170 расчета уставок может идентифицировать время достижения географической «уставки», когда следует передать команды на реализацию. Уставка рассчитывается как точка, расстояние до которой от препятствия таково, что распределитель и плуг вводятся в действие в полном объеме, когда транспортное средство 1 достигает препятствия. Иначе говоря, с учетом известной скорости движения транспортного средства 1 расстояние между уставкой и препятствием транспортное средство 1 будет проходить за время, равное времени, которое необходимо для полного ввода в действие распределителя и плуга с тем, чтобы последний выполнял свои функции на основании новых параметров по достижении препятствия (ни значительно раньше, ни значительно позже).
На фиг. 6 проиллюстрирована ситуация, когда транспортное средство 1 движется к препятствию (точка В) со скоростью V1 (относительной скоростью движения транспортного средства 1 относительно препятствия) по прямому пути в направлении вектора скорости V1. Расстояние между транспортным средством 1 и препятствием 25 (точка В) задано величиной еН (рассчитанной модулем 110 модели окружающей среды). Географическая уставка идентифицируется на линии, соединяющей транспортное средство 1 с препятствием В, и идентифицируется с помощью опорной точки SP на фиг 6. Расстояние между уставкой SP и препятствием 25 (точка В) обозначено величиной ΔSP. Это расстояние ΔSP должно преодолеваться транспортным средством 1 за время, равное максимальному времени tATT_МАХ ввода в действие распределителя и плуга, и, в общем, оно может учитывать все задержки реализации, которые зависят от используемого транспортного средства 1. Следовательно, значение tATT_МАХ известно.
Например, поскольку время удлинения/укорачивания плуга 4 на единицу пространства и времени (например, метров в секунду) известно, то можно рассчитать значение tATT_L выдвижения, которое рассчитывается модулем 140 в зависимости от L(eH). Это же верно для средства 5 доставки, которое управляется таким образом, чтобы регулировать, по меньшей мере, один из следующих параметров: тип наносимого продукта; объем продукта, наносимого на единицу площади; ширину нанесения; или асимметрию нанесения. Следует отметить, что соответствующая коррекция требует известного времени, равного tATT_S. Модуль 170 уставок принимает величины tATT_L и tATT_S и определяет, что tATT_MAX=max(tATT_L, tATT_S).
Может быть предусмотрен запас по надежности. Следовательно, расстояние ΔSP равно v1-tATT_MAX. Соответственно, расстояние dSP между транспортным средством 1 и точкой SP равно eH-ΔSP, и оно проходится транспортным средством 1 за время, равное v1-dSP.
В общем, модулем 170 реализуется следующий процесс, идентифицирующий достижение (или «соответствие») уставки SP:
i Когда известно расстояние (еН) между транспортным средством и препятствием, производится оценка количества импульсов тахометра для достижения уставки SP, и получаются GPS-координаты. По существу, поскольку количество импульсов на метр (NI) является известным параметром (зависит от конфигурации тахометра, установленного на транспортном средстве 1), то при известном расстоянии dSP, отделяющем транспортное средство 1 от препятствия, рассчитанное количество NSP импульсов составляет NSP=dSP-NI.
ii Подсчитывается фактическое количество NE импульсов тахометра транспортного средства 1 во время его использования.
iii Если количество NE превышает пороговое значение (переменное, выбираемое в виде процентной доли оценочного значения NSP, например, 80% от NSP), то также детектируются текущие GPS-координаты транспортного средства 1.
iv Количество №импульсов и текущие GPS-координаты сравниваются с соответствующими опорными/расчетными значениями, и если, по меньшей мере, одна из них достигает опорного/расчетного значения, то уставка SP считается достигнутой.
Ясно, что процедура, описанная выше, может быть модифицирована с использованием только оценки количества импульсов тахометра таким образом, что уставка SP считается достигнутой, когда NE=NSP. Аналогичным образом может быть использован только сигнал GPS, и в этом случае уставка SP считается достигнутой, если GPS-координаты уставки SP соответствуют (исключая погрешность, присущую системе GPS) текущим GPS-координатам транспортного средства 1.
Управление с помощью тахометра
Решающий модуль 130 инициализирует, как было сказано выше, табличную структуру, содержащую целевые ориентиры реализации. Каждый целевой ориентир также соотносится (помимо широты, долготы и направления) с расстоянием от текущего положения, которое выражено в виде количества импульсов тахометра.
Эта информация может быть использована следующим образом: если после того, как было достигнуто указанное количество импульсов тахометра, транспортное средство 1 находится на расстоянии меньше допустимого порогового значения (что зависит от точности сигнала GPS), то вводятся в действие параметры нанесения продукта/выдвижения плуга.
Как показано на фиг. 4, модуль 190 проверяет, была ли достигнута уставка SP, на основании указанных соображений. Если уставка SP не достигнута, то осуществляется переход к стадии, выполняемой модулем 110 модели окружающей среды для получения обновленных значений еН, d1 и d2, после чего выполняются стадии, описанные выше, для нового расчета расстояния dSP. Цикл повторного получения/перерасчета значений еН, d1 и d2 выполняется через регулярные промежутки времени или в непрерывном режиме. Таким образом, даже в случае изменений на пути движения, торможений, увеличения скорости и т.п. транспортного средства 1 расчетное значение времени достижения уставки SP непрерывно обновляется с учетом фактических и текущих условий.
Если уставка SP достигнута, то вводятся в действие (блок 200) механические изменения, внесенные в средство 5 доставки и плуг 4, что осуществляется через блок 6 управления, который передает соответствующие управляющие сигналы реализации с помощью блока 17 обработки данных.
Затем осуществляется переход к стадиям, выполняемым модулем 110 модели окружающей среды для получения значений d1 и d2 и еН с тем, чтобы обеспечить корректное срабатывание средства 5 доставки и плуга 4 при полностью выдвинутом препятствии. По существу локальное изменение ширины препятствия может привести к изменению величин d1 и d2, обуславливая изменение режима работы распределителя и/или плуга.
Аналогичным образом проверка указанных значений позволяет идентифицировать окончание препятствия с последующим восстановлением параметров реализации до достижения препятствия (или же, в любом случае, новых параметров, которые учитывают детектированные изменения).
Следовательно, настоящее изобретение обеспечивает адаптивное управление грузовым автомобилем 1 промышленного назначения, который может автоматически адаптироваться к различным (непредвиденным) условиям на пути движения и потенциальным изменениям в манере вождения водителя, реализуя по мере необходимости наилучшие стратегии (перемещения и выдвижения плуга/нанесения продуктов) для текущей ситуации.
И, наконец, очевидно, что в то, что описано и проиллюстрировано в настоящем документе могут быть внесены изменения и модификации без отступления от объема заявленного изобретения.
В частности, настоящее изобретение применимо самоочевидным образом к транспортным средствам 1, выполненным с возможностью выполнения даже всего одной операции из числа следующих операций: нанесения твердых/жидких продуктов и механической уборки снега/льда с использованием плуга 4.
Кроме того, следует отметить, что препятствием 25 может служить любой элемент, находящийся на проезжей части или иным образом располагающийся на пути движения грузового автомобиля 1 промышленного назначения, например, дополнительное транспортное средство 1 (автомобиль, грузовик, велосипед и т.п.), движущееся перед грузовым автомобилем 1 промышленного назначения в том же направлении или приближающееся к грузовому автомобилю 1 промышленного назначения с противоположной стороны.
Кроме того, блок 21 интерфейса представляет собой интерфейс пользователя, который может быть выполнен с возможностью показа водителю параметров (управления плугом и его выдвижения/нанесения продукта), которые заданы или, как ожидается, будут заданы по мере необходимости после детектирования препятствия или изменения направления или иного элемента на пути движения. Интерфейс пользователя может также показывать водителю предупреждения или сигналы тревоги, если стиль вождения водителя таков, что новые параметры (управления плугом и его выдвижения/нанесения продуктов) не могут быть в полной мере реализованы до достижения препятствия (например, из-за того, что скорость движения транспортного средства 1 настолько велика, что они не могут быть реализованы в полной мере за время tATT_MAX).


Группа изобретений относится к управлению грузовым автомобилем промышленного назначения во время выполнения операции по обработке поверхности дорожного полотна. Выполняют детектирование препятствия на пути движения, фактического изменения направления движения автомобиля по пути движения, запланированного изменения направления движения автомобиля по пути движения. При этом препятствие определяет локальное сужение или расширение пути движения, а фактическое и запланированное изменения определяют соответствующее изменение первого расстояния до автомобиля от первой бровки на пути движения и второго расстояния до автомобиля от второй бровки на пути движения. Выполняют расчет в зависимости от первого и второго расстояний и/или от локального сужения или расширения, вторых параметров обработки поверхности дорожного полотна. Управляют немедленным введением в действие вторых параметров обработки автомобилем в случае фактического изменения направления движения. В противном случае выполняют расчет оценочного времени достижения изменения направления движения или препятствия, расчет значения интервала времени, необходимого для полного ввода в действие вторых параметров обработки, и начало реализации автомобилем вторых параметров обработки в момент времени, который соответствует оценочному времени за вычетом интервала времени полного ввода в действие. Предотвращаются ошибки обработки поверхности дорожного полотна при изменении условий по пути движения, вдоль которого осуществляется обработка. 2 н. и 18 з.п. ф-лы, 6 ил.
1. Способ управления грузовым автомобилем (1) промышленного назначения во время операции по обработке поверхности (9) дорожного полотна вдоль пути движения, выполняемой грузовым автомобилем (1) промышленного назначения с использованием первых параметров обработки, причем этот способ предусматривает следующие стадии: детектирование по меньшей мере одного из следующих параметров: i) препятствия (25) на указанном пути движения, ii) фактического изменения направления движения грузового автомобиля (1) промышленного назначения по указанному пути движения, iii) запланированного изменения направления движения грузового автомобиля (1) промышленного назначения по указанному пути движения; при этом указанное препятствие (25) определяет локальное сужение или расширение указанного пути движения, а указанные фактическое и запланированное изменения определяют соответствующее изменение первого расстояния (d1) до грузового автомобиля (1) промышленного назначения от первой бровки (27) на пути движения и второго расстояния (d2) до грузового автомобиля (1) промышленного назначения от второй бровки (28) на пути движения; расчет, в зависимости от указанных первого и второго расстояний (d1, d2) и/или от указанного локального сужения или расширения, вторых параметров обработки поверхности (9) дорожного полотна; и управление немедленным введением в действие вторых параметров обработки грузовым автомобилем (1) промышленного назначения в случае фактического изменения указанного направления движения; в противном случае выполняются следующие стадии: расчет оценочного времени достижения указанного изменения направления движения или препятствия (25); расчет значения интервала времени (tATT_MAX), необходимого для полного ввода в действие вторых параметров обработки; и начало реализации грузовым автомобилем (1) промышленного назначения вторых параметров обработки в момент времени (dSP), который соответствует оценочному времени за вычетом интервала времени (tATT_MAX) полного ввода в действие.
2. Способ по п. 1, в котором указанное препятствие (25) представляет собой один из следующих признаков: изменение геометрических параметров пути движения; наличие какого-либо объекта или препятствия на указанном пути движения; наличие транспортного средства на указанном пути движения.
3. Способ по п. 1 или 2, в котором грузовой автомобиль (1) промышленного назначения содержит средство (5) доставки, выполненное с возможностью нанесения твердого и/или жидкого продукта (7) на поверхность (9) дорожного полотна; и в котором реализация вторых параметров обработки предусматривает коррекцию следующих параметров нанесения указанного продукта (7): типа наносимого продукта; объема продукта, наносимого на единицу площади; ширины нанесения; симметричности нанесения.
4. Способ по любому из предшествующих пунктов, в котором грузовой автомобиль (1) промышленного назначения снабжен плугом (4) телескопического типа для механической уборки снега и/или льда с поверхности (9) дорожного полотна и в котором реализация вторых параметров обработки предусматривает по меньшей мере одну из следующих операций: подъем и опускание плуга (4) относительно поверхности (9) дорожного полотна; вращения плуга (4) вокруг по меньшей мере одной оси коррекции; изменения телескопического выдвижения плуга (4).
5. Способ по любому из предшествующих пунктов, в котором грузовой автомобиль (1) промышленного назначения дополнительно содержит систему (15) позиционирования GPS/GNSS и в котором стадия расчета оценочного времени достижения указанного препятствия (25) выполняется автоматически указанной системой (15) позиционирования GPS/GNSS.
6. Способ по любому из предшествующих пунктов, в котором стадия детектирования препятствия (25) предусматривает приложение модели окружающей среды к данным, получаемым через лидар или радар (18), установленный на грузовом автомобиле (1) промышленного назначения.
7. Способ по п. 6, в котором модель окружающей среды представляет собой компьютерную программу, выполненную с возможностью определения на основании данных, предоставляемых лидаром или радаром (18): ширины (L(eH)) указанного пути движения при указанном препятствии (25); первого расстояния (d1) и второго расстояния (d2).
8. Способ по п. 7, в котором стадия расчета вторых параметров обработки предусматривает коррекцию ширины нанесения продукта таким образом, чтобы ширина нанесения характеризовалась значением, которое меньше указанной ширины (L(eH)) указанного пути движения при указанном препятствии (25).
9. Способ по п. 7, в котором стадия расчета вторых параметров обработки предусматривает коррекцию симметричности нанесения продукта в зависимости от указанных первого и второго расстояний (d1, d2) таким образом, чтобы область нанесения указанного продукта (7) средством (5) доставки у первой бровки (27) была равна или меньше первого расстоянии, а у второй бровки (28) - равна или меньше второго расстояния (d2).
10. Способ по п. 7, в котором стадия расчета вторых параметров обработки предусматривает изменение телескопического выдвижения плуга (4) таким образом, чтобы значение выдвижения плуга (4) было меньше указанной ширины (L(eH)) указанного пути движения при указанном препятствии (25).
11. Система для управления грузовым автомобилем (1) промышленного назначения во время операции по обработке поверхности (9) дорожного полотна, выполняемой грузовым автомобилем (1) промышленного назначения с использованием первых параметров обработки, причем эта система включает в себя: модуль (110) модели окружающей среды, выполненный с возможностью детектирования по меньшей мере одного из следующих параметров: i) препятствия (25) на указанном пути движения, ii) фактического изменения направления движения грузового автомобиля (1) промышленного назначения по указанному пути движения, iii) запланированного изменения направления движения грузового автомобиля (1) промышленного назначения по указанному пути движения; при этом указанное препятствие (25) определяет локальное сужение или расширение указанного пути движения, а указанные фактическое и запланированное изменения определяют соответствующее изменение первого расстояния (d1) до грузового автомобиля (1) промышленного назначения от первой бровки (27) на пути движения и второго расстояния (d2) до грузового автомобиля (1) промышленного назначения от второй бровки (28) на пути движения; по меньшей мере один модуль (140-160) расчета параметров, выполненный с возможностью расчета, в зависимости от указанных первого и второго расстояний (d1, d2) и/или от указанного локального сужения или расширения, вторых параметров обработки поверхности (9) дорожного полотна; и модуль (170) реализации параметров, выполненный с возможностью: управления немедленным введением в действие вторых параметров обработки грузовым автомобилем (1) промышленного назначения в случае фактического изменения указанного направления движения; в противном случае выполняются следующие операции: расчет оценочного времени достижения указанного изменения направления движения или препятствия (25); расчет значения интервала времени (tATT_MAX), необходимого для полного ввода в действие вторых параметров обработки; и начало реализации грузовым автомобилем (1) промышленного назначения вторых параметров обработки в момент времени (dSP), который соответствует оценочному времени за вычетом интервала времени (tATT_MAX) полного ввода в действие.
12. Система по п. 11, в которой указанное препятствие (25) представляет собой один из следующих признаков: изменение геометрических параметров пути движения; наличие какого-либо объекта или препятствия на указанном пути движения; наличие транспортного средства на указанном пути движения.
13. Система по п. 11 или 12, в которой грузовой автомобиль (1) промышленного назначения содержит средство (5) доставки, выполненное с возможностью нанесения твердого и/или жидкого продукта на поверхность (9) дорожного полотна; и в которой модуль (170) реализации параметров выполнен с дополнительной возможностью реализации вторых параметров обработки путем коррекции следующих параметров нанесения указанного продукта (7): типа наносимого продукта; объема продукта, наносимого на единицу площади; ширины нанесения и симметричности нанесения.
14. Система по любому из пп. 11-13, в которой грузовой автомобиль (1) промышленного назначения снабжен плугом (4) телескопического типа для механической уборки снега и/или льда с поверхности (9) дорожного полотна и в которой модуль (170) реализации параметров выполнен с дополнительной возможностью реализации вторых параметров обработки с выполнением по меньшей мере одной из следующих операций: подъема и опускания плуга (4) относительно поверхности (9) дорожного полотна; вращения плуга (4) вокруг по меньшей мере одной оси коррекции; изменения телескопического выдвижения плуга (4).
15. Система по любому из пп. 11-14, дополнительно содержащая систему (15) позиционирования GPS/GNSS, причем модуль (170) реализации параметров выполнен с возможностью расчета оценочного времени достижения указанного препятствия (25) с использованием данных геолокации, предоставляемых указанной системой (15) позиционирования GNSS или GPS.
16. Система по любому из пп. 11-15, дополнительно содержащая лидарный или радарный датчик (18), причем указанный модуль (110) модели окружающей среды выполнен с возможностью взаимодействия с указанным лидарным или радарным датчиком (18) для идентификации указанного препятствия (25), первого расстояния (d1) и второго расстояния (d2).
17. Система по п. 16, в которой модель окружающей среды представляет собой компьютерную программу, причем эта система дополнительно содержит блок (17) обработки данных, выполненный с возможностью прогона указанной модели окружающей среды с тем, чтобы определить на основании данных, предоставляемых лидаром или радаром (18): ширину (L(eH)) указанного пути движения при указанном препятствии (25); первое расстояние (d1) и второе расстояние (d2).
18. Система по п. 17, дополнительно содержащая модуль (200) движения, связанный с модулем (170) реализации параметров и выполненный с возможностью: приема вторых параметров обработки из модуля (170) реализации параметров и коррекции ширины нанесения продукта таким образом, чтобы ширина нанесения характеризовалась значением, которое меньше указанной ширины (L(eH)) указанного пути движения при указанном препятствии (25).
19. Система по п. 17, дополнительно содержащая модуль (200) нанесения, связанный с модулем (170) реализации параметров и выполненный с возможностью управления средством (5) доставки для коррекции симметричности нанесения продукта в зависимости от указанных первого и второго расстояний (d1, d2) таким образом, чтобы область нанесения указанного продукта (7) у первой бровки (27) была равна или меньше первого расстоянии, а у второй бровки (28) - равна или меньше второго расстояния (d2).
20. Система по п. 17, дополнительно содержащая модуль (200) движения, связанный с модулем (170) реализации параметров и выполненный с возможностью: приема вторых параметров обработки из модуля (170) реализации параметров и изменения телескопического выдвижения плуга (4) таким образом, чтобы значение выдвижения плуга (4) было меньше указанной ширины (L(eH)) указанного пути движения при указанном препятствии (25).
| US 10113283 B1, 30.10.2018 | |||
| US 20120124868 A1, 24.05.2012 | |||
| DE 3812833 A1, 26.10.1989 | |||
| DE 3427367 A1, 06.02.1986 | |||
| US 20070089325 A1, 26.04.2007 | |||
| US 6246938 B1, 12.06.2001 | |||
| РОБОТ-СНЕГОУБОРЩИК | 2015 |
|
RU2636402C2 |

