Изобретение относится к области бронетанковой техники, в частности к системе управления огнем боевой машины, обеспечивающей управление вооружением.
Изобретение позволяет повысить точность сопровождения относительно движущейся цели, снизить нагрузку на оператора, повысить точность определения исходных данных для расчета баллистических задач и повысить эффективность боевого применения боевой машины независимо от навыков оператора по точности сопровождения цели.
Технический результат - повышение точности сопровождения относительно движущейся цели, вызванное движением цели и/или собственного движения боевой машины, снижение нагрузки на оператора за счёт исключения необходимости сопровождать цель вручную, повышение точности определения исходных данных для расчета баллистических задач за счет увеличения точности сопровождения цели и исключения ошибок оператора связанных с неточным сопровождением цели вручную и повышение эффективности боевого применения боевой машины независимо от навыков оператора по точности сопровождения цели за счет оснащения боевой машины автоматом сопровождения целей.
Современные объекты бронетанковой техники оснащаются системами управления огнем (СУО), позволяющими использовать вооружение боевой машины с максимальной эффективностью днем и ночью, на месте и в движении.
Известна СУО [1, 2187060] с дневным и ночным прицелами, имеющими независимую стабилизацию полей зрения в плоскостях вертикального и горизонтального наведения, объединенные в единый прицельный комплекс, в котором обеспечивается совмещение и синхронное перемещение линий визирования двух прицелов и совместное использование технических возможностей каждого из прицелов. В качестве первого дневного прицела используется прицел 1Г46 [2, Техническое описание] и [3, Инструкция по эксплуатации], в качестве второго ночного прицела используется тепловизионный прицел.
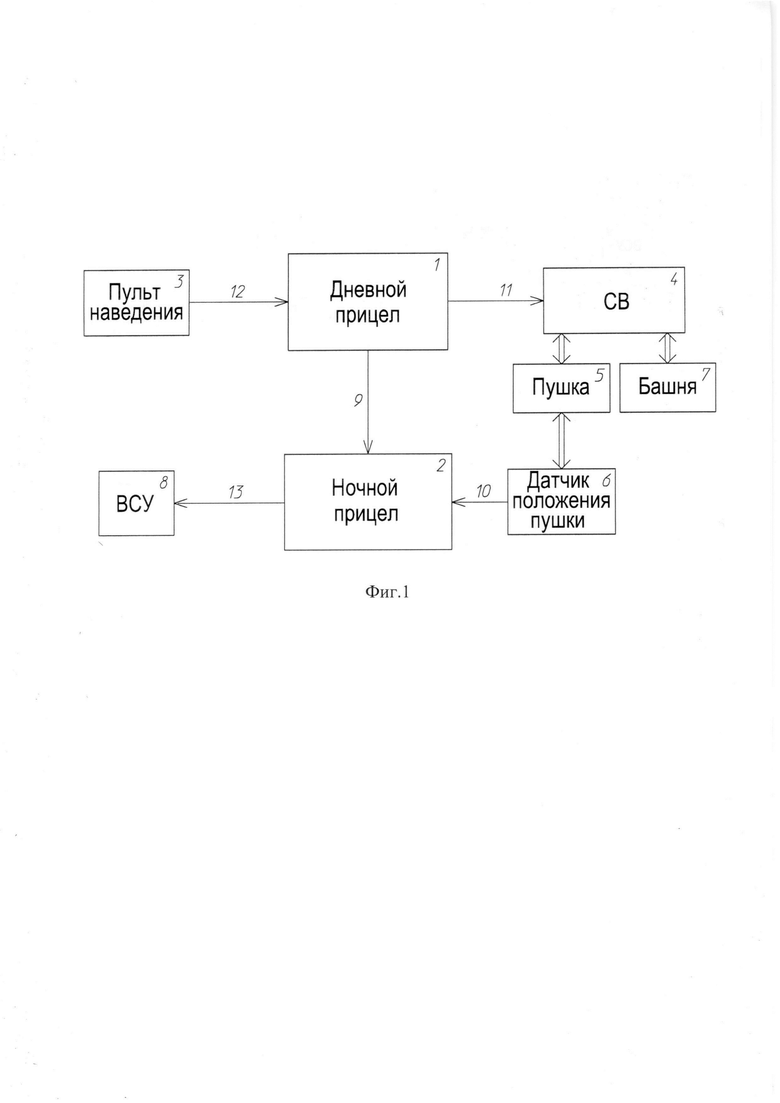
В качестве прототипа предложена система управления огнем, описанная в [1], [2] и [3], иллюстрацией которой может служить составленная авторами по упомянутым источникам Фиг.1, включающая в себя дневной прицел (поз.1) с независимой стабилизацией поля зрения в вертикальной и горизонтальной плоскостях, ночной прицел (поз.2) с независимой стабилизацией поля зрения в вертикальной и горизонтальной плоскостях, пульт наведения (поз.3), обеспечивающий наведение линии визирования дневного прицела (поз.1) по электрическим сигналам наведения (поз.12) от пульта наведения (поз.3). По сигналам управления (поз.11) стабилизатором вооружения (СВ) (поз.4) осуществляется наведение башни (поз.7) и наведение пушки (поз.5). С пушкой (поз.5) механически связан датчик положения пушки (поз.6), который пропорционально положению пушки формирует сигнал положения пушки в вертикальной плоскости (поз.10). Ночной прицел (поз.2) по сигналам датчиков углов (поз.9) дневного прицела (поз.1), пропорциональных положению поля зрения в вертикальной и горизонтальной плоскостях, и сигналу положения пушки в вертикальной плоскости (поз.10) осуществляет совмещение и синхронное перемещение линий визирования, обеспечивая слежение линии визирования ночного прицела (поз.2) за линии визирования дневного прицела (поз.1). Видеоизображение от ночного прицела (поз.2) транслируется с помощью видеосигналов (поз.13) и отображается на видеосмотровом устройстве (поз.8).
Для простоты понимания на Фиг.1 показано одно видеосмотровое устройство (ВСУ). Количество ВСУ может варьироваться от одного до двух, одно для наводчика, второе для командира, при этом количество ВСУ не влияет на слежение линии визирования ночного прицела (поз.2) за линии визирования дневного прицела (поз.1).
Двойной линией на Фиг.1 обозначены механические связи элементов, одинарной линией - электрические связи.
Недостатками прототипа заявитель считает низкую точность сопровождения движущейся цели вручную, влияние навыков оператора по точности сопровождения цели на эффективность боевого применения боевой машины, высокую нагрузку на оператора за счет необходимости сопровождать цель вручную, низкую точность определения исходных данных для расчёта баллистических задач из-за низкой точности сопровождения цели вручную и возможных ошибок оператора, вызванных неточным сопровождением цели вручную.
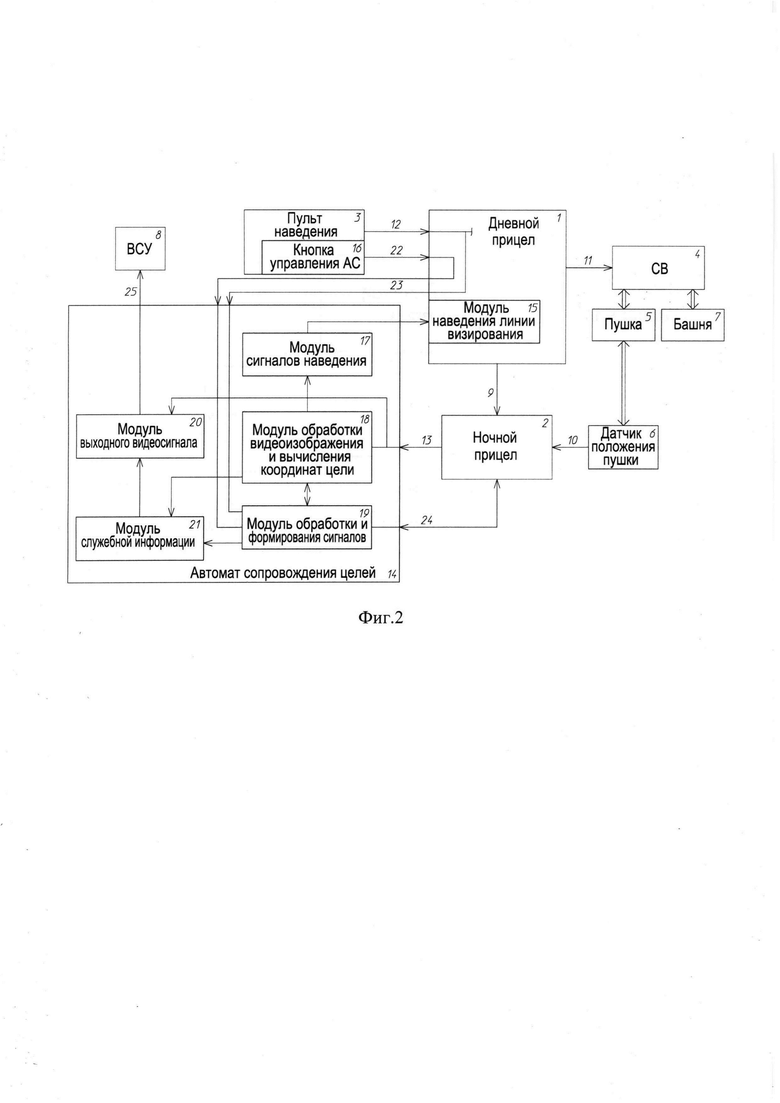
Для понимания сущности изобретения заявитель представляет Фиг.2
«Способ модернизации боевой машины путем оснащения автоматом сопровождения целей», на которой помимо автомата сопровождения целей (поз.14), кнопки управления автоматическим сопровождением (АС) (поз.16) в пульте наведения (поз.3), модуля наведения поля зрения (поз.15) в дневном прицеле (поз.1) показаны элементы системы управления огнем и вооружения боевой машины.
Осуществление предлагаемого технического решения поясняется блок-схемой на упомянутой Фиг.2 с детальным обозначением приборов, обеспечивающих функционал системы управления огнем с дневным и ночным прицелами и автоматом сопровождения цели во взаимосвязи с вооружением боевой машины. Двойной линией на Фиг.2 обозначены механические связи элементов, одинарной линией - электрические связи.
Номера позиций и функционал элементов блок-схемы:
1 - дневной прицел с независимой стабилизацией поля зрения в вертикальной и горизонтальной плоскостях;
2 - ночной прицел с независимой стабилизацией поля зрения в вертикальной и горизонтальной плоскостях;
3 - пульт наведения, обеспечивает формирование электрических сигналов (поз.12) для наведения линии визирования дневного прицела (поз.1) в вертикальной и горизонтальной плоскостях.
4 - стабилизатор вооружения (СВ), обеспечивающий стабилизацию пушки и спаренного с ней пулемета в двух плоскостях;
5 - пушка - основное вооружение боевой машины, размещенная в башне; наведение пушки осуществляется в вертикальной плоскости относительно башни;
6 - датчик положения пушки, обеспечивающий выработку электрического сигнала, соответствующего углу возвышения пушки в вертикальной плоскости;
7 - башня; броневая поворотная конструкция, вращающаяся в горизонтальной плоскости;
8 - видеосмотровое устройство (ВСУ), обеспечивает воспроизведение видеоизображения от ночного прицела 2 (см. Фиг.1) или от АСЦ 14 (см. Фиг.2);
9 - электрические сигналы от датчиков углов дневного прицела (поз.1). Упомянутые сигналы датчиков углов пропорциональны положению поля зрения дневного прицела в вертикальной и горизонтальной плоскостях (положению зеркала дневного прицела в вертикальной и горизонтальной плоскостях);
10 - электрический сигнал положения пушки в вертикальной плоскости (угол возвышения пушки) от датчика положения пушки;
11 - электрические сигналы управления СВ в вертикальной и горизонтальной плоскостях. По сигналам управления СВ осуществляется стабилизация пушки (поз.5) в вертикальной плоскости и башни (поз.7) в горизонтальной плоскости;
12 - электрические сигналы наведения от пульта наведения (поз.3) для наведения линии визирования дневного прицела (поз.1) в вертикальной и горизонтальной плоскостях;
13 - видеосигнал, предназначенный для передачи видеоизображение от ночного прицела (поз.2);
14 - базовый элемент блок-схемы - автомат сопровождения целей (АСЦ). Обеспечивает автоматическое сопровождение цели, наблюдаемой на видеоизображении ночного прицела (поз.2);
15 - модуль наведения линии визирования дневного прицела (поз.1). Модуль по сигналам наведения от формирователя сигналов наведения (поз.17) в АСЦ (поз.14) обеспечивает наведения линии визирования дневного прицела (поз.1) в вертикальной и горизонтальной плоскостях для автоматического сопровождения цели;
16 - кнопка управления автоматическим сопровождением (АС). Кнопка располагается в пульте наведения (поз.3). Предназначена для захвата цели на АС и сброса АС;
17 - модуль сигналов наведения. Формирует сигналы для наведения линии визирования дневного прицела (поз.1) при автоматическом сопровождении цели;
18 - модуль обработки видеоизображения и вычисления координат цели. Модуль предназначен для обработки видеоизображения ночного прицела (поз.2), определяет контур цели, размеры цели, условный центр цели и вычисляет координат цели относительно нулевого (выверенного) положения линии визирования ночного прицела (поз.2), прогнозируемые координаты цели при перекрытии её;
19 - модуль обработки и формирования сигналов. Модуль предназначен для обработки и формирования сигналов необходимых для обеспечения функционирования АСЦ (поз.14) в составе СУО, переключения режимов работы АСЦ, взаимодействия между АСЦ и ночным прицелом (поз.2);
20 - модуль выходного видеосигнала. Формирует выходной видеосигнал АСЦ (поз.4) для отображения видеоизображения от АСЦ на ВСУ (поз.8). Выходной видеосигнал представляет собой видеосигнал (поз.13) от ночного прицела (поз.2), на который дополнительно накладывается графическая служебная информация, включая прицельный знак, на основании данных, поступающих от модуля служебной информации (поз.21), которая соответствует текущему режиму работы АСЦ, текущему полю зрения ночного прицела (поз.2), размерам сопровождаемой цели;
21 - модуль служебной информации. Формирует исходные данные о текущей служебной информации на основании данных, поступающих от модуля обработки видеоизображения и вычисления координат цели (поз.18), модуля обработки и формирования сигналов (поз.19);
22 - сигнал от кнопки управления АС (поз.16), расположенной в пульте наведения (поз.3). Этот сигнал от кнопки транслируется в дневной прицел (поз.1) и далее в АСЦ (поз.14). По сигналу от кнопки АСЦ производит захват цели на АС или сброс АС, если цель была захвачена на АС;
23 - сигналы наведения линии визирования дневного прицела (поз.1) в вертикальной и горизонтальной плоскостях от пульта наведения (поз.3). Этот сигнал от пульта наведения транслируется в дневной прицел (поз.1) и далее в АСЦ (поз.14). АСЦ анализирует уровни сигналов наведения для повышения стабильности контура АС и для смещения точки прицеливания при АС (режим «донацеливание»);
24 - сигналы взаимодействия между АСЦ и ночным прицелом (поз.2). Сигналы необходимы для взаимодействия АСЦ и ночного прицела (поз.2) с целью их совместного функционирования;
25 - выходной видеосигнал АСЦ (поз.25). Видеосигнал транслируется с формирователя выходного видеосигнала АСЦ (поз.25) на выход АСЦ и далее на ВСУ (поз.8) для отображения на нем видеоизображения от АСЦ.
Таким образом, заявляемым «Способом модернизации боевой машины путем оснащения автоматом сопровождения целей» достигнут технический результат - повышение точности сопровождения относительно движущейся цели, вызванное движением цели и/или собственного движения боевой машины, снижение нагрузки на оператора за счёт исключения необходимости сопровождать цель вручную, повышение точности определения исходных данных для расчёта баллистических задач за счёт увеличения точности сопровождения цели и исключения ошибок оператора связанных с неточным сопровождением цели вручную и повышение эффективности боевого применения боевой машины независимо от навыков оператора по точности сопровождения цели за счет оснащения боевой машины автоматом сопровождения целей.
Заявленный «Способ модернизации боевой машины путем оснащения автоматом сопровождения целей», по мнению заявителя, в совокупности признаков обладает новизной, высоким техническим уровнем и перспективой практического использования, в том числе при минимально необходимом объеме доработок системы управления огнем боевой машины и при модернизации таковых.
Источники информации:
1. Нейгебауэр Ю.Н. и др. Система управления огнем. Патент № 2187060. МПК F41G 5/14, F41G 3/22. Дата приоритета 11.01.2000 г., опубл. 10.08.2002г. Патентообладатель УКБТМ, г. Н.Тагил.
2. Танк Т-90С. Техническое описание 188.ТО-Э5-1. Часть 1. Стр. 16,17,47,57.
3. Танк Т-90С. Инструкция по эксплуатации 188.ИЭ-Э5-1. Стр. 49,68.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| Система управления огнем боевой машины | 2022 |
|
RU2785804C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2828680C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| Система управления огнем боевой машины и блок управления автоматикой | 2018 |
|
RU2718186C1 |
| СПОСОБ СТРЕЛЬБЫ КОМПЛЕКСА ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЕРИМЕНТАЛЬНОЙ ЗАВИСИМОСТИ УГЛОВОЙ СКОРОСТИ ЛИНИИ ВИЗИРОВАНИЯ | 2012 |
|
RU2529241C2 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2024 |
|
RU2839637C1 |
| Комплекс вооружения боевой машины с информационно-управляющей системой | 2016 |
|
RU2628027C1 |
Изобретение относится к системе управления огнем боевой машины, обеспечивающей управление вооружением. Способ модернизации боевой машины заключается в оснащении комплексом бортового оборудования и автоматом сопровождения цели. Автомат сопровождения цели включает в себя модуль выходного видеосигнала, модуль сигналов наведения, модуль обработки видеоизображения и вычисления координат цели, модуль обработки и формирования сигналов, модуль служебной информации. Достигается повышение точности сопровождения относительно движущейся цели. 2 ил.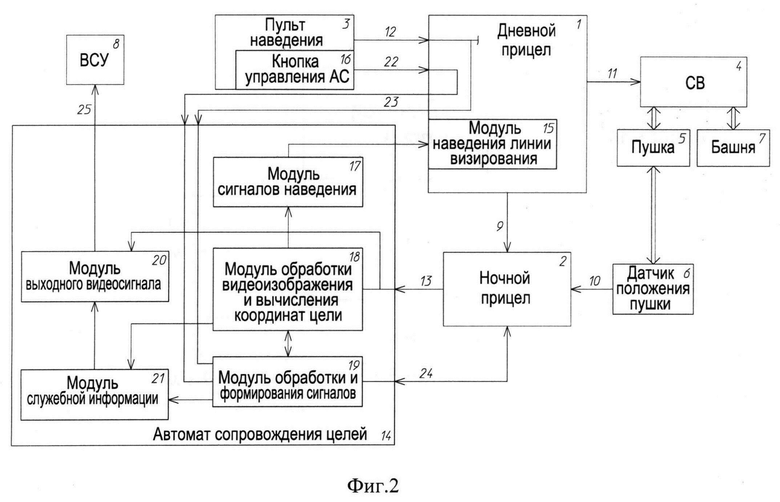
Способ модернизации боевой машины, заключающийся в оснащении комплексом бортового оборудования, состоящего из:
- дневного прицела с независимой стабилизацией поля зрения в вертикальной и горизонтальной плоскостях;
- ночного прицела с независимой стабилизацией поля зрения в вертикальной и горизонтальной плоскостях;
- пульта наведения наводчика, обеспечивающего наведение линии визирования дневного прицела;
- стабилизатора вооружения, обеспечивающего стабилизацию в двух плоскостях пушки и спаренного с ней пулемета;
- датчика положения пушки, осуществляющего выработку электрического сигнала, соответствующего углу возвышения пушки в вертикальной плоскости;
- видеосмотрового устройства,
отличающийся тем, что упомянутую боевую машину снабжают автоматом сопровождения цели, включающим в себя модуль выходного видеосигнала, модуль сигналов наведения, модуль обработки видеоизображения и вычисления координат цели, модуль обработки и формирования сигналов, модуль служебной информации,
при этом в упомянутом дневном прицеле реализуют модуль наведения линии визирования для наведения линии визирования дневного прицела от автомата сопровождения цели,
при этом в упомянутом пульте наведения реализуют кнопку управления автоматическим сопровождением.
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2187060C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СПОСОБ СТРЕЛЬБЫ ИЗ БМД-4М В РЕЖИМЕ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2715940C1 |
| Конвейер для заготовочных цехов обувных фабрик | 1960 |
|
SU134624A1 |
| ФУНГИЦИДНАЯ СМЕСЬ | 0 |
|
SU184753A1 |
| Система управления огнем боевой машины и блок управления автоматикой | 2018 |
|
RU2718186C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЧЕРТЕЖНОЙ ПРОЗРАЧНОЙБУМАГИ | 0 |
|
SU204894A1 |

