Область техники
Предлагаемое изобретение относится к области конструирования различного назначения летательных аппаратов, использующих в качестве структурной основы динамику перемещения и строение опахала махового пера птиц, полет которых обусловлен взмахом бородок первого и второго порядка, которые способны зацепляться и перекрывать воздушный поток при движении крыла вниз и наоборот размыкаться при движении крыла вверх, что создает минимальное сопротивление потоку воздуха, создавая тем самым подъемную силу.
Уровень техники
Из уровня техники известен содержащий силовую установку «махолет» (см. RU 2655582, кл. B64C33/02, публ. 2018 г. [1]).
Известное из уровня техники решение [1] относится к области авиации, а конкретно к летательным аппаратам с крыльями, конструкционно устроенными по принципу крыльев насекомых и копирующими в полете движения крыльев таковых.
Выявленное решение [1] содержит корпус и упомянутую силовую установку, включающую поршень, шток которого соединен с имеющимися крыльями, создающими подъемную силу.
Согласно замыслу рассматриваемого технического решения [1] крылья летательного аппарата выполнены эластичными по принципу крыльев насекомых, выполняемых с передними жесткими ведущими кромками и с возможностью вращения вокруг указанных кромок, причем на упомянутом корпусе установлены телескопические тяги, каждая из которых связана с передней ведущей кромкой своего крыла.
Преимуществом использования указанных крыльев, в соответствии с описанием решения [1], является развитие увеличенной подъемной силы летательного аппарата.
Как было упомянуто выше, крылья летательного аппарата являются эластичными и имеют передние силовые ребра, роль которых в соответствии с замыслом выполняют лонжероны, которые также служат в качестве приводных средств эластичных крыльев и при маховых движениях таковых постоянно находятся в условиях динамических нагрузок, что в процессе эксплуатации и/или вследствие внешнего воздействия способно приводить к значительному ухудшению полетных характеристик, связанных с вероятными смещаемыми, в том числе ввиду эластичности крыльев, траекториями возвратно-поступательного движения указанных силовых приводных ребер в виде лонжеронов, в связи с чем недостатком известного летательного средства следует считать невозможность качественного проведения полетов с гарантией безопасного приземления.
Наиболее близким в отношении технической сути к заявляемому изобретению следует считать летательный аппарат типа орнитоптера, известный из RU 2236988, кл. B64C33/00, публ. 2004 г. [2].
Известное решение [2] относится к авиации, в частности к летательным аппаратам тяжелее воздуха с машущими крыльями, способным осуществлять вертикальный взлет и поддерживать летательный аппарат в воздухе.
Выявленный из уровня техники летательный аппарат имеет движитель в виде лопастей, а также привод, включающий двигатель с коленчатым и карданным валами.
В соответствии с замыслом автора указанный привод размещается в отдельном корпусе и снабжен рычагом, обеспечивающим поворот корпуса, на рычаге установлен пульт управления, причем дополнительно привод снабжен шатуном, на свободном конце которого закреплены карданы, также шатун снабжен кулисой, имеющей форму цилиндра, при этом вал имеющейся ведомой вилки кардана образует с силовым элементом винтовую пару, а имеющаяся шаровая опора, закрепленная на силовом элементе, выполнена с возможностью взаимодействия с корпусом привода и снабжена упорами, предотвращающими перемещение силового элемента относительно корпуса.
Основой технического решения [2], в соответствии с описанием, является получение орнитоптера повышенной маневренности и улучшение взлетных, полетных и посадочных характеристик летательного аппарата.
Согласно известной конструкции, летательный аппарат имеет кабину с посадочным местом для размещения пилота, при этом маневрирование летательным аппаратом возможно за счет расположенного в кабине рычага, изменение положения которого позволит изменять пространственную ориентацию корпуса, однако регулировка и контроль положения указанного рычага производятся в ручном режиме посредством мускульной силы человека, поэтому успешность полета напрямую зависит от погодных условий, технического состояния аппарата и от навыков и возможностей пилота, которые могут быть не совершенны и/или сопровождаться ошибочными действиями, приводящими к потере контроля управления, в связи с чем основным недостатком известного решения следует считать нестабильные показатели безопасности, непосредственно зависящие от внешних факторов и индивидуальных способностей пилота.
Раскрытие изобретения
Технической проблемой предлагаемого изобретения является создание обладающего высокими технико-эксплуатационными характеристиками тягового приводного устройства для летательного аппарата махового типа.
Техническим результатом предлагаемого изобретения является реализация назначения по созданию указанного приводного движительного устройства, обладающего улучшенной аэродинамической эффективностью полета.
Заданный технический результат, решающий существующую техническую проблему, достигается в результате того, что приводное движительное устройство для летательного аппарата махового типа содержит проходной трубообразный элемент, внутри которого на опорных компонентах расположен имеющий возможность совершения возвратно-поступательного-линейного перемещения приводной вал с установленным на нем клапанным устройством, размещенным между упомянутыми опорными компонентами, каждый из которых состоит из стержнеобразных, по меньшей мере, трех стоек, одними концевыми частями соединенными с внутренней поверхностью трубообразного элемента, а другими концевыми частями через индивидуальные роликовые механизмы, соединенными с указанным приводным валом, при этом клапанное устройство сформировано двумя односторонне подвижными створками, имеющими единую объединительную ось вращения с образованием за счет образующихся сил инерции и аэродинамических сил сопротивления потока воздуха чередующихся раскрытых и соответственно закрытых положений клапанного устройства, подвижные створки которого в совокупности имеют в плане форму, сопоставимую с формой поперечного сечения трубообразного элемента.
Согласно наилучшему варианту исполнения изобретения между поверхностью трубообразного элемента и клапанным устройством в закрытом положении имеется технологический зазор.
Является рациональным и целесообразным, если входная концевая часть трубообразного элемента имеет воронкообразное исполнение, вход которого непосредственно обращен во внешнюю среду.
Предлагаемое решение, выраженное в виде приводного движительного устройства для летательного аппарата махового типа, возможно сопоставлять и ассоциировать со структурой и принципами работы махового пера птицы, где при движении крыла вверх наружное и внутреннее опахало птицы раскрывается, что придает наименьшее сопротивление воздуху в дальнейшем при махе крыла вниз в обратную сторону, при этом бороздки опахала закрывают воздушный поток и создают максимальное закрытие проходящему потоку воздуха, тем самым создавая подъемную силу в крыле. Вместе с тем крыло птицы при взмахе сгибается для цели поднятия с наименьшим сопротивлением и соответственно расправляется при опускании вниз для создания подъемной силы, при этом описанная динамика работы крыла птицы реализуется с помощью предлагаемого движительного устройства, имеющего подвижный вал, на котором установлено клапанное устройство, образованное двумя односторонне подвижными створками, имеющими единую ось вращения, что создает открытое и закрытое положение клапана.
Предлагаемый вариант исполнения устройства применен в используемом проходном трубообразном элементе, т.е. в корпусе в виде трубы с помещенным валом, имеющим возможность совершать линейное возвратно-поступательное перемещение, причем закрепленное на валу клапанное устройство для воздушного потока выполнено захлопывающимся по принципу птичьего пера, в соответствии с которым при линейном движении вала (штока) в одну сторону (влево) створки (опахало) клапанного устройство складывается для обеспечения минимального сопротивления потока, а при движении вала (штока) в другую сторону клапанное устройство полностью раскрывается и выталкивает поток воздуха по каналу трубообразного элемента, создавая тем самым воздушную тягу.
В соответствии с изобретательским замыслом вал (шток) может совершать возвратно-поступательное линейное перемещение с помощью любых известных силовых систем на электрической или топливной основе.
Таким образом, предлагаемое приводное движительное устройство для летательного аппарата махового типа образует совокупность признаков, достаточных для достижения заданного технического результата, заключающегося в реализации назначения по созданию приводного движительного устройства для летательного аппарата махового типа, обладающего улучшенной аэродинамической эффективностью полета, что в свою очередь способствует реализации существующей технической проблемы по созданию, обладающего высокими технико-эксплуатационными характеристиками тягового приводного устройства для летательного аппарата махового типа.
Краткое описание чертежей
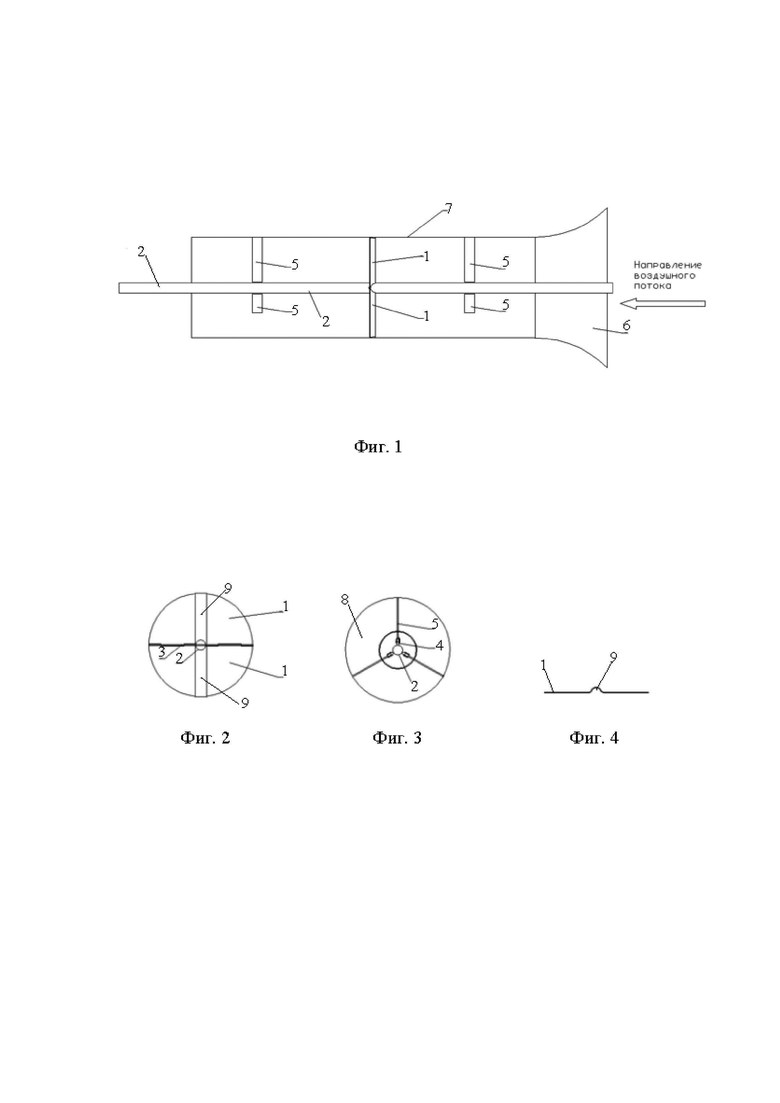
На фиг. 1 представлено строение предлагаемого приводного движительного устройства;
На фиг. 2 представлен вид сверху используемого клапанного устройства;
На фиг. 3 представлен вид сверху используемого опорного компонента;
На фиг. 4 представлен поперечный профиль одной из створок клапанного устройства;
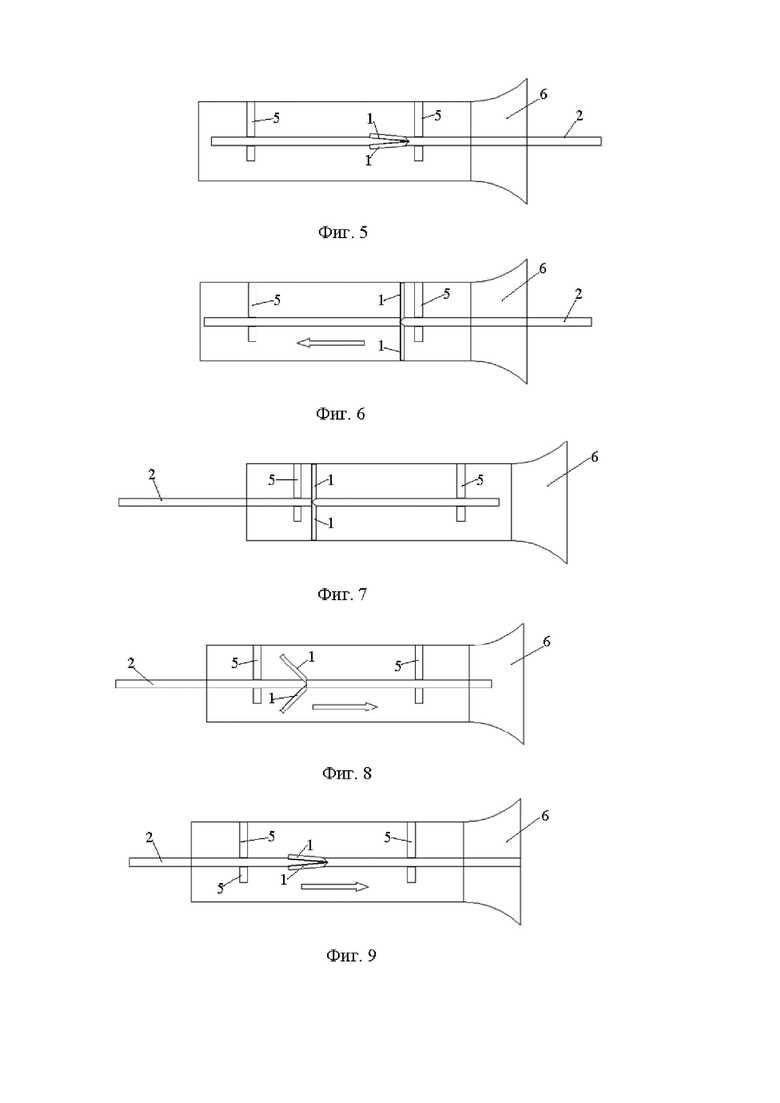
На фиг. 5 представлена первая фаза работы движительного устройства;
На фиг. 6 представлена вторая фаза работы движительного устройства;
На фиг. 7 представлена третья фаза работы движительного устройства;
На фиг. 8 представлена четвертая фаза работы движительного устройства;
На фиг. 9 представлена пятая фаза работы движительного устройства;
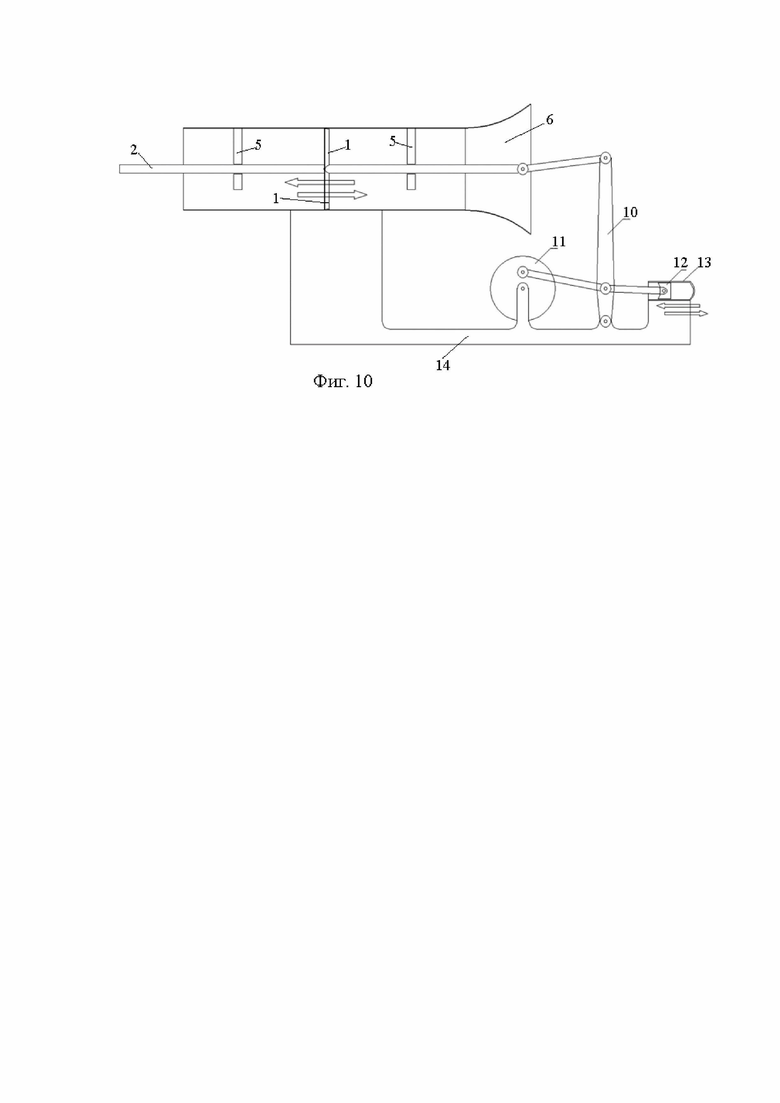
На фиг. 10 представлен вариант реализации движительного устройства.
Осуществление изобретения
Предлагаемое приводное устройство для летательного аппарата махового типа поясняется конкретными примерами выполнения и реализации, которые, однако, не являются единственно возможными, но наглядным образом демонстрируют достижение указанной совокупностью существенных признаков заданного технического результата, а также решение указанной технической проблемы.
На прилагаемых фиг. 1-10 соответствующими позициями обозначены следующие части и элементы, используемые при реализации предлагаемого приводного движительного устройства для летательного аппарата махового типа:
1 – створка;
2 – подвижный вал;
3 – объединительная ось вращения;
4 – роликовые механизмы;
5 – стойки;
6 – входная концевая часть;
7 – трубообразный элемент;
8 – канал;
9 – канавка (рабочей поверхности створки);
10 – рычаг;
11 – маховик;
12 – поршень-толкатель;
13 – цилиндр;
14 – поршневой ДВС.
Итак, предлагаемое приводное движительное устройство для летательного аппарата махового типа содержит проходной трубообразный элемент 7. Внутри проходного трубообразного элемента 7 на опорных компонентах расположен имеющий возможность совершения возвратно-поступательного линейного перемещения приводной подвижный вал 2 (шток) с установленным на нем клапанным устройством.
Указанное клапанное устройство в соответствии с замыслом размещается в канале 8 между упомянутыми опорными компонентами.
Каждый опорный компонент (в данном примере реализации их два) по существу состоит из стержнеобразных трех стоек 5, которые одними концевыми частями соединены с внутренней поверхностью трубообразного элемента 7, а другими концевыми частями через индивидуальные роликовые механизмы 4 соединены с приводным валом 2.
Конструкционно клапанное устройство сформировано двумя односторонне подвижными створками 1, имеющими объединительную ось вращения 3.
Образующиеся в канале 8 силы инерции, а также аэродинамические силы сопротивления потока воздуха, влияющие на клапанное устройство, создают чередование раскрытия и закрытия односторонне подвижных створок 1 клапанного устройства.
Подвижные створки 1 клапанного устройства в совокупности (в сочетании) имеют в плане форму сопоставимую с формой поперечного сечения проходного трубообразного элемента 7.
Между поверхностью проходного трубообразного элемента 7 и клапанным устройством в закрытом положении имеется технологический зазор.
Входная концевая часть 6 трубообразного элемента 7 имеет воронкообразное исполнение, вход которого непосредственно обращен во внешнюю среду.
Входная концевая часть 6 трубообразного элемента 7 также может быть выполнена в виде входного диффузора, а именно аэродинамического устройства расширяющегося по ходу движения воздушного потока в канале 8, что позволит уменьшать скорость потока на входе, обеспечивая оптимальность рабочей частоты линейного возвратно-поступательного движения вала 2 с клапанным устройством.
Противоположная выходная концевая часть трубообразного элемента 7 может быть выполнена в виде выходного сопла, сужающегося по ходу движения потока воздуха в канале 8, что позволит в некоторой степени увеличить скорость потока на выходе с целью уменьшения рабочей частоты движения вала 2 с клапанным устройством и увеличения тяги при сохранении габаритов рабочей части устройства.
Осуществляется предлагаемое приводное движительное устройство для летательного аппарата махового типа, следующим образом.
На фиг. 10 представлен вариант реализации предлагаемого движительного устройства с подключенным поршневым двигателем внутреннего сгорания 14 (ДВС).
Подвижный вал 2 приводного движительного устройства совершает необходимые для создания тяги линейные возвратно-поступательные движения при помощи привода от качающегося рычага 10, который приводится в движение от поршня-толкателя 12, находящегося в цилиндре 13. Качающийся рычаг 10 также кинематически соединен с маховиком 11.
Цилиндр 13 и поршень-толкатель 12 являются частями стандартного двухтактного ДВС. Ввиду действия рабочего хода поршня-толкателя 12 от давления сгорающей в цилиндре 13 горючей смеси, рычаг 10 толкает подвижный вал 2 приводного движительного устройства с установленным согласно замыслу клапанным устройством, оснащенным подвижными створками 1, обеспечивая таким образом ускорение воздушного потока в канале 8, т.е. внутри трубообразного элемента 7. Вместе с тем часть энергии движения передается маховику 11. В ситуации достижения подвижным валом 2 предельного заднего положения, маховик 11, используя накопленную энергию перемещает в переднее положение качающийся рычаг 10, что обеспечивает перемещение в переднее положение вала 2 с клапанным устройством согласно замыслу, а также перемещение поршня-толкателя 12 для сжатия в цилиндре 13 горючей смеси.
На основании изложенного рабочие фазы предлагаемого приводного движительного устройства для летательного аппарата следует представить в следующем виде.
Фаза 1 (см. фиг. 5)
Начало цикла. Подвижный вал 2 находится в крайнем переднем положении, при этом односторонне подвижные створки 1 находятся в сложенном положении. В таком положении воздушный поток свободно проходит в канал 8 внутри трубообразного элемента 7. Давление воздушного потока удерживает подвижные створки 1 клапанного устройства в сложенном положении.
Фаза 2 (см. фиг. 6)
Подвижный вал 2 начинает линейное поступательное движение назад (влево). Ввиду действия сил инерции, а затем аэродинамических сил сопротивления поступающего потока воздуха подвижные створки 1 клапанного устройства раскрываются. По достижении скорости подвижного вала 2, превышающей скорость воздушного потока, клапанное устройство начинает ускорять поток воздуха внутри трубообразного элемента 7, т.е. в канале 8. Разница давлений воздуха перед и за клапанным устройством удерживает подвижные створки 1 в раскрытом положении.
Фаза 3 (см. фиг. 7)
Подвижный вал 2 с клапанным устройством достигает предельного заднего (в левой части) положения и начинает движение в противоположном направлении.
Фаза 4 (см. фиг. 8)
Подвижный вал 2 с клапанным устройством ускоренно движется вперед. Под действием сил инерции, а также аэродинамических сил воздушного потока подвижные створки 1 клапанного устройства складываются.
Фаза 5 (см. фиг. 9)
Подвижный вал 2 с клапанным устройством совершает движение к переднему предельному положению (правая часть), при этом подвижные створки 1 сложены. Воздушный поток свободно проходит внутри трубообразного элемента 7 в канале 8. Давление воздушного потока удерживает подвижные створки 1 клапанного устройства в сложенном положении.
Анализ аэродинамической эффективности предлагаемого приводного движительного устройства проведен теоретическим путем, основанным на научных знаниях.
Дополнительная скорость, придаваемая воздушному потоку внутри проходного трубообразного элемента 7 неравномерна. В период рабочего хода поршня-толкателя 12 скорость будет увеличиваться от нуля до максимума, а потом постепенно уменьшаться до нуля. Причем на обратном ходе дополнительной скорости не будет.
Рассмотрим мгновенную ситуацию, когда в момент рабочего хода поршня-толкателя 12 дополнительная скорость равна v1.
На входе приводного движительного устройства перед входной концевой частью 6 имеем скорость потока V0. Поршень-толкатель 12 при этом должен двигаться быстрее скорости потока, придавая воздуху внутри трубообразного элемента 7 дополнительную скорость v1. Таким образом, полная скорость потока на выходе движительного устройства составит:
V = V0 + v1;
Закон сохранения импульса применительно к воздушному потоку внутри трубообразного элемента 7 составляет:
F × dt = dm × v1;
Массовый расход воздуха через трубообразный элемент 7 в единицу времени составит:
dm/dt = ρ × S × (V0 + v1);
Сила тяги движительного устройства составит:
F = dm/dt × v1 = ρ × S × (V0 + v1) × v1;
Пропульсивная (полезная) мощность, приводящая летательный аппарат в движение составит:
Nп = F × V0;
Мощность, затрачиваемая движительным устройством на создание тяги, составит:
Nз = F × V = F × (V0 + v1);
Пропульсивный (полезный) КПД движительного устройства равен соотношению полезной и затраченной мощности, а именно:
η = Nп / Nз = F × V0 / F × (V0 + v1) = V0 /(V0 + v1) = 1/(1 + v1/ V0).
Из выражения для получаемого КПД η = 1/(1 + v1/ V0) определяется, что для повышения КПД движительного устройства нужно стремиться сделать дополнительную скорость, привносимую движительным устройством как можно меньше.
Таким образом, для получения тяги, как следует из выражения для тяги движительного устройства, желательно увеличивать поперечное сечение движительного устройства.
Пример 1
Компактный одноместный летательный аппарат, массой 250 кг, летит со скоростью 144 км/ч, при аэродинамическом качестве к = 10, при этом нуждается в тяге движительного устройства = 250 Н.
Условно трубообразный элемент 7 имеет диаметр 1 м, а ход используемого поршня-толкателя 12 = 2 м.
Плотность воздуха на уровне моря ρ = 1,22 кг/м2.
Площадь поршня-толкателя 12 составит S = 0,79 м2.
Таким образом:
F = ρ × S × (V0 + v1) × v1;
250 = 1,22 × 0,79 × (40 + v1) × v1.
Уравнение имеет решение при v1 =5,67 м/с, средняя скорость поршня-толкателя 12 должна быть 40 + 5,67 = 45,67 м/с.
Клапанное устройство движительного устройства совершает возвратно-поступательные движения, при этом его скорость изменяется по закону синуса.
В этом случае средняя скорость движения клапанного устройства составит 2/π от максимальной скорости за период толчка, и 1/π за полный период движения. Следовательно, чтобы средняя скорость клапанного устройства составляла 45,67 м/с, необходимо иметь максимальную скорость в середине рабочего хода:
45,67 × π = 143 м/с.
Время одного рабочего хода должно быть равным 2/ (45,67 х 2) = 0,022 с.
Частота хода клапанного устройства - это обратная величина от времени рабочего хода и составляет 45,67 ход/с или 2740 ход/мин.
Дополнение
Ввиду неравномерности скоростей в движительном устройстве рационально снизить требования к средней тяги движительного устройства.
К примеру, в случае применения двух движительных устройств, потребуется получить среднюю скорость движения клапанного устройства на рабочем ходе 2/π от максимальной.
Необходимо иметь максимальную скорость в середине рабочего хода, а именно:
45,67 × π/2 = 71,5 м/с.
Время одного рабочего хода должно быть 2/45,67 = 0,044 с.
Частота хода клапанного устройства - это обратная величина от времени рабочего хода и составляет 22,8 ход/с или 1370 ход/мин.
Таким образом, пропульсивный КПД движительного устройства равен соотношению полезной и затраченной мощности:
η = Nп / Nз = F × V0 / F × (V0 + v1) = V0 /(V0 + v1) = 1/(1 + v1/ V0) = 1/(1 + 5,67/ 40) = 0,88.
Это достаточно высокий теоретически достижимый показатель КПД.
Пример 2
Температура окружающей среды = 0° градусов Цельсия.
Давление в трубообразном элементе 7 = 2 атм = 0,202 МПа.
Давление на выходе трубообразного элемента 7 – 1 атм = 0,101 МПа.
Избыточное давление равно разности между давлением внутри трубообразного элемента 7 и наружным давлением:
P2 = 0,101 МПа.
Диаметр канала 8 = 100 мм.
Коэффициент расхода – 0,7.
Коэффициент расхода выражает степень сопротивления трубообразного элемента 7 потоку. В данном примере ожидается околозвуковая скорость истечения воздуха из трубообразного элемента, поэтому коэффициент расхода выбран 0,7. Максимальный коэффициент расхода 1.
Расчет выполнен с помощью ЭВМ.
Расход воздуха через трубообразный элемент 7 = 149,4 Нм3/мин.
Расход воздуха через трубообразный элемент 7 в других единицах - 149,4 Нм3/мин = 2,49 м3/с.
S2 = 0,0079 м2.
Скорость струи на выходе из трубообразного элемента 7 составляет:
V0 + v2 = 2,49/S2 = 317 м/с.
Скорость движения поршня-толкателя 12 составляет:
V2 = (ρ/ρ2) × 2,49/S = 1,58 м/с.
Тяга через импульс при нулевой скорости летательного аппарата составляет:
F = dm/dt × v2 = 2,49 × 1.28 × 317 = 1012 Н.
Пропульсивная мощность, затрачиваемая движительным устройством на создание тяги, составляет:
Np = P2 × S × V2 = 0,101 × 106 × 0,79 × 1,58 = 126 068 Вт = 126 кВт.
Пример 3
Температура окружающей среды = 0° градусов Цельсия.
Давление в трубообразном элементе 7 перед входом = 1,3 атм. = 0,132 МПа.
Давление на выходе трубообразного элемента 7 = 1 атм. = 0,101 МПа.
Избыточное давление равно разности между давлением внутри трубообразного элемента 7 и наружным давлением:
P2 = 0,031 МПа.
Диаметр трубообразного элемента 7 = 100 мм.
Коэффициент расхода = 0,95.
Расчет выполнен с помощью ЭВМ.
Расход воздуха через трубообразный элемент 7 = 104,7 Нм3/мин.
Расход воздуха через трубообразный элемент 7 в других единицах = 104,7 Нм3/мин = 1,75 м3/с.
S2 = 0,0079 м2.
Скорость струи на выходе из трубообразного элемента 7 составит:
V0 + v2 = 1,75/S2 = 220 м/с.
Скорость движения поршня-толкателя 12 составит:
V2 = (ρ/ρ2) × 1,75/S = 1,70 м/с.
Тяга через импульс при нулевой скорости летательного аппарата F = dm/dt × v2 = 1,75 × 1.28 × 220 = 493 Н.
Пропульсивная мощность, затрачиваемая движительным устройством на создание тяги:
Np = P2 × S × V2 = 0?031 × 106 × 0,79 × 1,58 = 38 694 Вт = 38 кВт.
Используя летательный аппарат из примера 1, получаем следующие параметры.
Тяга через импульс при скорости летательного аппарата 40 м/с F = dm/dt × v2 = 1,75 × 1.28 × (220 – 40) = 403 Н.
Пропульсивная (полезная) мощность, приводящая летательный аппарат в движение:
Nп = F × V0 = 403 × 40 = 16120 Вт = 16,12 кВт.
Пропульсивный КПД движительного устройства равен соотношению полезной и затраченной мощности:
η = Nп / Nз =16,12/38 = 0,42.
Анализ представленных примеров реализации 1, 2 и 3 показывает, что с помощью предлагаемого приводного движительного устройства для летательного аппарата теоретически образуются высокие аэродинамические характеристики, а также устойчивый и высокий пропульсивный КПД.
Используемые обозначения в представленных примерах реализации:
V0 – скорость потока = скорость летательного аппарата;
V – полная скорость потока в движительном устройстве;
v1 – дополнительная скорость, приданная потоку в движительном устройстве;
v2 – дополнительная скорость, приданная потоку в канале движительного устройства;
F – сила тяги движительного устройства;
m – масса ускоряемого объема воздуха;
t – интервал времени;
S – поперечная площадь потока в движительном устройстве;
S2 – поперечная площадь потока в канале движительного устройства;
Nп – пропульсивная мощность, создаваемая движительным устройством = полезная мощность;
Nз – затраченная на создание тяги мощность;
η – пропульсивный коэффициент полезного действия движительного устройства;
ρ – плотность воздуха;
ρ2 – плотность сжатого воздуха перед каналом;
P2 – избыточное давление в цилиндре перед каналом;
V2 – скорость движения клапанного устройства при рабочем ходе с каналом;
dt – дифференциал функции времени;
dm – дифференциал функции массы воздушного потока.
Предлагаемое изобретение может быть успешно и широко использовано в качестве движителей для летательных аппаратов различного строения и назначения.
Предлагаемое изобретение относится к области конструирования различного назначения летательных аппаратов, использующих в качестве структурной основы динамику перемещения и строение опахала махового пера птиц. Приводное движительное устройство для летательного аппарата махового типа содержит проходной трубообразный элемент, внутри которого на опорных компонентах расположен имеющий возможность совершения возвратно-поступательного линейного перемещения приводной вал с установленным на нем клапанным устройством, размещенным между упомянутыми опорными компонентами. Каждый опорный компонент состоит из стержнеобразных, по меньшей мере, трех стоек, одними концевыми частями соединенными с внутренней поверхностью трубообразного элемента, а другими концевыми частями через индивидуальные роликовые механизмы соединенными с указанным приводным валом. Клапанное устройство сформировано двумя односторонне подвижными створками, имеющими единую объединительную ось вращения с образованием за счет образующихся сил инерции и аэродинамических сил сопротивления потока воздуха, чередующихся раскрытых и соответственно закрытых положений клапанного устройства, подвижные створки которого в совокупности имеют в плане форму, сопоставимую с формой поперечного сечения трубообразного элемента. Обеспечивается улучшение аэродинамической эффективности полета. 2 з.п. ф-лы, 10 ил.
1. Приводное движительное устройство для летательного аппарата махового типа, содержащее проходной трубообразный элемент, внутри которого на опорных компонентах расположен имеющий возможность совершения возвратно-поступательного линейного перемещения приводной вал с установленным на нем клапанным устройством, размещенным между упомянутыми опорными компонентами, каждый из которых состоит из стержнеобразных, по меньшей мере, трех стоек, одними концевыми частями соединенными с внутренней поверхностью трубообразного элемента, а другими концевыми частями через индивидуальные роликовые механизмы соединенными с указанным приводным валом, при этом клапанное устройство сформировано двумя односторонне подвижными створками, имеющими единую объединительную ось вращения с образованием за счет образующихся сил инерции и аэродинамических сил сопротивления потока воздуха чередующихся раскрытых и соответственно закрытых положений клапанного устройства, подвижные створки которого в сочетании имеют в плане форму, сопоставимую с формой поперечного сечения трубообразного элемента.
2. Приводное движительное устройство по п. 1, отличающееся тем, что между поверхностью трубообразного элемента и клапанным устройством в закрытом положении имеется технологический зазор.
3. Приводное движительное устройство по п. 1, отличающееся тем, что входная концевая часть трубообразного элемента имеет воронкообразное исполнение, вход которого непосредственно обращен во внешнюю среду.
| KR 20220068580 A, 26.05.2022 | |||
| УНИВЕРСАЛЬНЫЙ ПРИВОД МАХОЛЕТА | 2007 |
|
RU2349507C2 |
| US 2018244382 A1, 30.08.2018 | |||
| KR 20110057414 A, 01.06.2011 | |||
| УЗЕЛ УПРАВЛЕНИЯ КРЫЛОМ МАХОЛЕТА | 2001 |
|
RU2221730C2 |

