Область техники
Настоящее изобретение относится к измерению атмосферы с помощью наземных приемников глобальной навигационной спутниковой системы и, прежде всего, к измерению статистических характеристик, имеющих отношение к ионосфере и ионосферной активности.
Уровень техники
Космические радиосигналы широко используются для атмосферного мониторинга. Поскольку эти сигналы распространяются от их космических передатчиков до земли, атмосфера вызывает сдвиги фазы, групповые задержки и изменения амплитуды. Приемник, обрабатывающий эти сигналы соответствующим способом, может извлечь оценку изменений фазы, задержки и амплитуды, и может затем вывести некоторую информацию относительно атмосферы. Сигналы Глобальной навигационной спутниковой системы (ГНСС) широко используются с этой целью вследствие их распространенности, их глобальной зоны покрытия и тому обстоятельству, что они передаются на более чем одной частоте. Ионосфера и тропосфера подвергаются мониторингу с использованием этих сигналов, поскольку они обе вызывают изменения в скорости распространения и направлении сигналов, передаваемых в L-диапазоне.
Для измерения этих эффектов применяют приемники ГНСС. Эти приемники отслеживают несущую частоту, фазу и модулированный код измерения дальности этих сигналов, и производят измерения мощности сигнала, фазы несущей частоты и задержки кода измерения дальности. Эти значения, в дальнейшем именуемые измерениями необработанного сигнала, затем используют для вычисления различных свойств, относящихся к распространению сигнала через атмосферу, в дальнейшем именуемых атмосферными измерениями. Обычно, для получения таких измерений необработанного сигнала приемник выполняет отслеживание с обратной связью интересующих параметров, и типичные системы включают в себя использование схемы (DLL) автоподстройки по задержке для кода измерения дальности и схемы (PLL) фазовой автоподстройки для несущей частоты. Хотя являются доступными и многие другие системы, в целом, для получения измерений необработанного сигнала приемники основываются на некоторой разновидности рекурсивного механизма обратной связи/упреждающего сигнала.
Вычисление атмосферных измерений зависит как от доступности, так и от качества измерений необработанного сигнала. Таким образом, когда отслеживающие алгоритмы приемника испытывают трудности при точном отслеживании параметров сигнала, снижается качество результирующих атмосферных измерений. Конкретная реализация алгоритма отслеживания также оказывает влияние на результирующие атмосферные измерения, например, эффекты фильтрации или нерегулярные ошибки в рамках алгоритмов отслеживания могут являться источником артефактов в атмосферных измерениях.
Атмосферные аномалии (например, ионосферная сцинтилляция) могут вызывать трудности для алгоритма отслеживания приемника, и когда приемник используется для измерения этой аномалии, атмосферные измерения могут быть значительно ухудшены по качеству либо вследствие ухудшенного качества измерений необработанного сигнала, либо вследствие их отсутствия, когда алгоритмы отслеживания терпят неудачу. Многие ранее используемые способы повышения устойчивости отслеживания приемника и доступности измерений, такие как увеличенные продолжительности интегрирования и уменьшенная ширина полосы отслеживания, также способствуют ухудшению измерений необработанного сигнала и, в конечном счете, имеют результатом артефакты в атмосферных измерениях.
Генерация конкретных атмосферных измерений, включает сюда, например, ионосферное измерение, известное как сигма-фи (σϕ), требует фильтрации измерений необработанного сигнала. Этот этап фильтрации, зачастую известный как исключение тренда, имеет существенно длительное время сходимости. Когда происходит перемежающееся отсутствие измерений необработанного сигнала, проистекающее из него отсутствие атмосферных измерений может оказаться существенно более длительным.
Недостатком современных подходов является этап оценки. Параметры необработанного сигнала оцениваются или отслеживаются приемником прежде их использования для вычисления атмосферных измерений. При преобладании неидеальных условий этот этап отслеживания является проблематичным. Недостатки обычных систем обсуждаются относительно фиг. 1 и 2 (уровень техники) в рамках обсуждения некоторых теоретических факторов.
Как правило, получаемый на антенне наземного приемника сигнал ГНСС моделируется следующим образом:

где Ssig является комплектом спутниковых сигналов в поле зрения, si (t) обозначает i-тый сигнал, полученный от видимых спутников, a n(t) обозначает совокупные тепловые помехи. Различные параметры в выражении (1) представляют следующие свойства сигнала: Pi является полной мощностью принятого сигнала в ваттах, ωi является номинальной радиочастотной несущей частотой в единицах измерения рад/с, di(t) представляет бинарный сигнал данных или вторичный код, ci(t) является последовательностью распределения сигнала и поднесущей частоты, θi(t) является полным полученным фазовым процессом, содержащим задержки распространения, динамические характеристики на участке от спутника к пользователю, атмосферные эффекты и эффекты спутникового опорного синхрогенератора, процесс τi(t) представляет полную задержку, наблюдаемую в приемнике, содержащую задержку распространения, эффекты спутникового опорного синхрогенератора и атмосферные задержки.
В частности, параметр θi(t) фазы несущей частоты в выражении (1) представляет несколько различных фазовых процессов. Математически, он может быть представлен в виде линейной комбинации:

то, где θ0 представляет некоторую произвольную начальную фазу, θLOS (t) представляет фазовый процесс, вызываемый геометрическими/динамическими параметрами линии прямой видимости между спутником и приемником, θsv Clk. (t) представляет фазовый процесс, вызываемый ошибками в спутниковом опорном синхрогенераторе, и θAtm. (t) представляет фазовый процесс, вызываемый атмосферой, через которую распространяется сигнал.
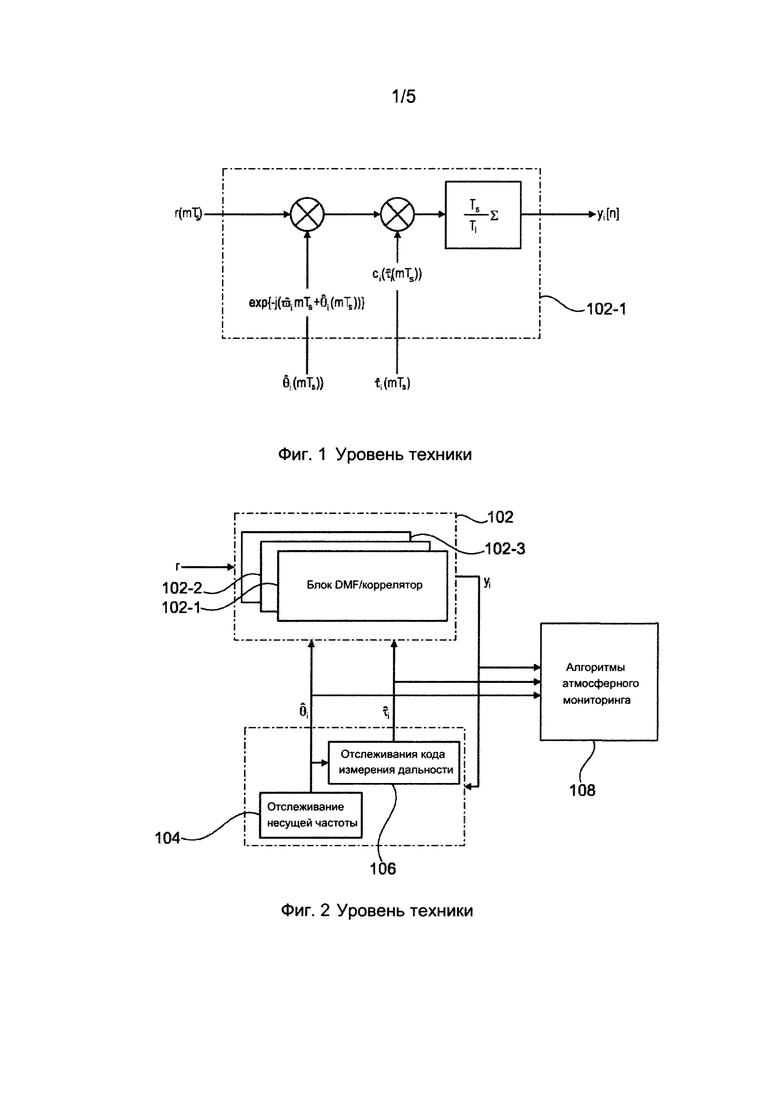
Фиг. 1 (уровень техники) является блок-диаграммой цифрового согласующего фильтра 102-1 обычного приемника, показывающей как локальные оценки фазы несущей частоты  и задержки кода измерения дальности
и задержки кода измерения дальности  используются для генерирования значений коррелятора Yi[n].
используются для генерирования значений коррелятора Yi[n].
Приемник ГНСС, в основном, реализует понижающее преобразование полученного радиочастотного сигнала к нулевой или ненулевой промежуточной частоте с последующей дискретизацией сигнала. Эти сигнальные отсчеты (r) затем обрабатываются посредством цифрового согласующего фильтра (DMF) 102-1, который реализует следующую операцию:

где переменные  и
и  являются оценками приемника для переменных τi и θi, как задано в выражении (1), а параметр Yi[n] известен как значение коррелятора.
являются оценками приемника для переменных τi и θi, как задано в выражении (1), а параметр Yi[n] известен как значение коррелятора.
Описанная в выражении (3) операция реализуется в приемнике в его алгоритме отслеживания в качестве части контуров отслеживания фазы несущей частоты и фазы кода измерения дальности.
Фиг. 2 (уровень техники) является блок-диаграммой типичной архитектуры отслеживания с обратной связью, изображающей контур для выполнения функций как контура 104 отслеживания несущей частоты, так и контура 106 отслеживания кода измерения дальности. Как очевидно специалистам в данной области техники, блок 102 DMF содержит несколько экземпляров 102-1, 102-2, 102-3 таких фильтров (то есть, по одному на канал. В данном случае, показано только три).
Типичная реализация соответствует представленной на фиг. 2 блок-диаграмме, причем значения Yi[n] коррелятора обрабатываются посредством блока 104 отслеживания несущей частоты и блока 106 отслеживания кода измерения дальности для получения оценок параметров сигнала  и
и  , которые, в свою очередь, используются для генерирования последующего комплекта значений Yi[n] коррелятора.
, которые, в свою очередь, используются для генерирования последующего комплекта значений Yi[n] коррелятора.
Конкретные алгоритмы, использующиеся для оценки свойств и характеристик атмосферы, через которую распространяются сигналы ГНСС, реализуются в блоке 108 под названием «Алгоритмы атмосферного мониторинга». Эти алгоритмы воздействуют на следующие величины: Yi[n], как сгенерировано посредством DMF 102, а также  и
и  , которые оцениваются алгоритмами отслеживания. Исполнение алгоритмов мониторинга подвергается непосредственному влиянию качества измерений необработанного сигнала и, таким образом, для приемников атмосферного мониторинга является крайне важным корректное функционирование как алгоритмов отслеживания несущей частоты, так и кода измерения дальности. Проблема состоит в том, что при высокой атмосферной активности изменение условий в канале распространения может быть таким, что эти алгоритмы отслеживания могут выполняться плохо или полностью потерпеть неудачу.
, которые оцениваются алгоритмами отслеживания. Исполнение алгоритмов мониторинга подвергается непосредственному влиянию качества измерений необработанного сигнала и, таким образом, для приемников атмосферного мониторинга является крайне важным корректное функционирование как алгоритмов отслеживания несущей частоты, так и кода измерения дальности. Проблема состоит в том, что при высокой атмосферной активности изменение условий в канале распространения может быть таким, что эти алгоритмы отслеживания могут выполняться плохо или полностью потерпеть неудачу.
Йорк Дж. и др. (York J. et al): «Разработка прототипа техасского ионосферного наземного приемника (TIGR)» (Development of a Prototype Texas Ionospheric Ground Receiver), 2012 ITM - Доклады международного технического совещания 2012 г. Института навигации, The Institute of Navigation, 8551 Rixlew lane, suite 360, Manassas, VA 20109, USA, 1 февраля 2012 (2012-02-01), страницы 1526-1556, XP056000936, описывает программный приемник, разработанный для производства ионосферных измерений по сигналам спутников. Радиочастотные данные непосредственно дискретизируются посредством двух гига-отсчетных аналогово-цифровых преобразователей, и передаются на FPGA (программируемую логическую интегральную схему), где они в цифровой форме фильтруются и субдискретизируются на три настраиваемых диапазона, каждый с шириной полосы 20 МГц. Сокращенный поток цифровых данных передается на вторую FPGA, где отдельные каналы фильтруются на множественные узкие сигнальные диапазоны, центрируемые по частоте сигнала спутника, как настраивается для компенсации прогнозируемого доплеровского смещения. Оценка фазы и амплитуды сигнала в этих данных осуществляется при помощи встроенного программного обеспечения, работающего на ЦП общего назначения.
Люлич Т.Д. и др. (Lulich Т. D. et al): «Отслеживание разомкнутого цикла радиосигналов затенения с бортовой платформы» (Open Loop Tracking of Radio Occultation Signals from an Airborne Platform), ГНСС 2010 - Доклады 23-го международного технического совещания спутникового подразделения института навигации (ION GNSS 2010), The Institute of Navigation, 8551 Rixlew lane, suite 360, Manassas, VA 20109, USA, 24 сентября 2010 (2010-09-24), страницы 1049-1060, XP056000217, описывает основанный на радио-затенении (RO) спосб дистанционного зондирования, использующий сигналы от Системы глобального позиционирования (GPS) для выявления электронной плотности в ионосфере с помощью способа отслеживания разомкнутого цикла (OL), использующего основанную на модели оценку доплеровской частоты и запись битов данных GPS.
Г. Байерле и др. (G. Beyerle et al): «Наблюдения и моделирование порождаемых приемником рефракционных отклонений при радио-затенениях GPS» (Observations and simulations of receiver-induced refractivity biases in GPS radio occultation), Журнал геофизических исследований, издание 111, №D12, 1 января 2006 (2006-01-01), ХР055158431, ISSN: 0148-0227, DOI: 10.1029/2005J D006673 описывает наблюдения и моделирование порождаемых приемником рефракционных отклонений при радио-затенениях GPS.
Ниу Ф. и др. (Niu F. et al): «Способы и характеристики исключения тренда фазы несущей частоты GPS при исследованиях сцинтилляции ионосферы» (GPS Carrier Phase Detrending Methods and Performances for Ionosphere Scintillation Studies), 2012 ITM - Доклады международного технического совещания 2012 г. института навигации, The Institute of Navigation, 8551 Rixlew lane, suite 360, Manassas, VA 20109, USA, 1 февраля 2012 (2012-02-01), страницы 1462-1467, XP056000934, описывает способы и характеристики исключения тренда фазы несущей частоты GPS при исследованиях сцинтилляции ионосферы. При исключении тренда используется фильтр Баттерворта 6-го порядка.
Настоящее изобретение, кроме того, направлено на производство атмосферных измерений, получаемых из измерений необработанных радионавигационных сигналов (например, ГНСС), генерируемых исключительно в рамках разомкнутого цикла.
Настоящее изобретение направлено на генерирование атмосферных измерений также и в условиях измерений необработанного сигнала низкого качества и/или высокой атмосферной активности.
Сущность изобретения
Согласно одному аспекту изобретения предоставляется система измерения для генерирования атмосферных измерений на основании по меньшей мере одного радионавигационного сигнала от находящегося на борту спутника передатчика радионавигационной системы, причем система измерения содержит: модуль сбора данных, модуль демодулятора и модуль алгоритмов атмосферного мониторинга, размещенные в конфигурации разомкнутого цикла, причем модуль сбора данных включает в себя опорный синхрогенератор, модуль сбора данных выполнен для получения радионавигационного сигнала и для генерирования из него нескольких IF отсчетов (r), причем каждый отсчет имеет ассоциированную временную метку (TOW), полученную от опорного синхрогенератора, и причем модуль демодулятора выполнен для получения IF отсчетов (r) и ассоциированных временных меток (TOW), а также вспомогательных данных, относящихся к спутниковой системе, и выполнен для генерирования из них значений (Yi) коррелятора, и причем модуль алгоритмов атмосферного мониторинга выполнен для получения значений (Yi) коррелятора и для генерирования из них атмосферных измерений.
Модуль сбора данных может быть выполнен для выпуска каждого IF отсчета (r) в виде помеченного IF отсчета (r), причем каждый помеченный IF отсчет (r) содержит IF отсчет (r), помеченный соответствующей временной меткой (TOW).
Модуль демодулятора может быть выполнен для получения помеченных IF отсчетов (r), причем каждое сгенерированное модулем демодулятора (32) значение (Yi) коррелятора ассоциировано с соответствующей временной меткой (TOW).
Модуль сбора данных может содержать аналого-цифровой преобразователь (ADC) для генерирования IF отсчетов (r), причем ADC соединен с опорным синхрогенератором (418) и генерирует IF отсчеты (r) при согласовании с ним по времени.
Модуль сбора данных может содержать модуль создания временных меток, выполненный для выпуска временных меток (TOW) синхронно с соответствующими IF отсчетами (r).
Модуль сбора данных может содержать модуль создания временных меток, соединенный с опорным синхрогенератором, причем модуль создания временных меток выполнен для эксплуатации в качестве локального счетчика, представляющего местное время, и причем значение локального счетчика увеличивается при генерировании каждого IF отсчета (r).
Модуль сбора данных может содержать понижающий преобразователь, выполненный для генерирования из радионавигационных сигналов аналоговых IF сигналов, причем понижающий преобразователь, функционирует на основе преобразовательного сигнала, полученного из выхода опорного синхрогенератора.
Модуль сбора данных может содержать PLL, соединенный для получения выхода опорного синхрогенератора, причем PLL приводит VCO, предоставляющий преобразовательный сигнал к понижающему преобразователю.
Опорный синхрогенератор может иметь степень синхронизации с временным интервалом радионавигационного сигнала менее одной десятой периода микросхемы кода измерения дальности радионавигационного сигнала.
Опорный синхрогенератор может иметь степень синхронизации с временным интервалом радионавигационного сигнала такой величины, что он может использоваться для продвижения оценки времени для генерирования временных меток с точностью около 1 наносекунды.
Опорный синхрогенератор может быть выполнен для продвижения вперед во времени от начальной точки синхронизации, соответствующей начальной временной метке.
В одном варианте осуществления опорный синхрогенератор содержит идеально смоделированный опорный синхрогенератор, причем временные метки получают из сигналов времени, продвигающихся от точки синхронизации сигнала в прошлом, с использованием заданного периода дискретизации.
В другом варианте осуществления опорный синхрогенератор содержит упорядоченный осциллятор, причем упорядоченный осциллятор включает в себя внутренний осциллятор и выполнен для получения упорядочивающего синхросигнала от внешнего стандарта частоты. Система может функционировать в фазе инициирования и в фазе сбора данных, причем опорный синхрогенератор выполнен с возможностью функционирования таким образом, что упорядочивание посредством упорядоченного осциллятора является активным во время фазы инициирования и деактивированным во время фазы сбора данных. Внешний стандарт частоты может быть предоставлен одним из числа сигнала ГНСС и сигнала GPS упорядоченного осциллятора (GPSDO).
В другом варианте осуществления опорный синхрогенератор содержит опорный синхрогенератор свободного хода, на котором выполняется динамическое моделирование его неизвестных параметров с помощью алгоритма оценки опорного синхрогенератора. Опорный синхрогенератор может быть использован для измерения оцененных параметров опорного синхрогенератора и для точного продвижения временных меток от начальной точки синхронизации на основании оцененных параметров опорного синхрогенератора. Оцененные параметры опорного синхрогенератора могут быть измерены по радионавигационным сигналам от первого комплекта находящихся на борту спутника передатчиков, и причем радионавигационный сигнал или сигналы, полученные модулем сбора данных, происходят от одного или нескольких находящихся на борту спутника передатчиков второго комплекта находящихся на борту спутника передатчиков, причем первый комплект и второй комплект не имеют общих находящихся на борту спутника передатчиков.
Вспомогательные данные могут включать в себя соотнесенный с приемником параметр (Rec.), причем соотнесенный с приемником параметр представляет кусочно-непрерывную траекторию антенны приемника в землецентричной, неподвижной относительно земли системе координат.
Вспомогательные данные могут включать в себя орбитальные параметры (S.V.) спутника, на котором смонтирован передатчик. Орбитальные параметры (S.V.) могут содержать радиовещательные эфемериды. Радиовещательные эфемериды могут содержать ГНСС эфемериды или точные эфемериды.
Вспомогательные данные могут включать в себя эфемеридную информацию (ATM).
Модуль демодулятора может включать в себя модель пользовательского приемника для получения временной метки (TOW) и соотнесенного с приемником параметра (Rec.), а также для вывода соотнесенной с приемником временной задержки (δtRX).
Модуль демодулятора может включать в себя модель (506) космического аппарата, причем модель космического аппарата выполнена для получения временной метки (TOW) и орбитальных параметров (S.V.), а также для генерирования соотнесенной с космическим аппаратом временной задержки (δtSV).
Модуль демодулятора может включать в себя атмосферную модель, причем атмосферная модель выполнена для получения временной метки (TOW), соотнесенной с приемником временной задержки (δtRX), соотнесенной с космическим аппаратом временной задержки (δtSV) и эфемеридной информации (Atm.), а также для вывода соотнесенной с атмосферой временной разности (δtA).
Модуль демодулятора выполнен для генерирования первой суммы, содержащей сумму соотнесенной с приемником временной разности (δtRX) и соотнесенной с космическим аппаратом временной разности (δtSV), а также для генерирования второй суммы, содержащей сумму первой суммы и соотнесенной с атмосферой временной разности (δtA), с целью генерирования соотнесенной с сигналом временной задержки (tSIG).
Модуль демодулятора может, кроме того, включать в себя МСО (оператор управляющего воздействия) кода и несущей частоты, служащий для получения задержки (tSIG) сигнала, а также для генерирования оценки  для ввода в DMF.
для ввода в DMF.
Модуль алгоритмов атмосферного мониторинга может включать в себя алгоритм реконструкции фазового процесса, причем алгоритм реконструкции фазового процесса содержит:
- устранение поворота текущих значений (Yi) коррелятора в результате предшествующей оценки фазы,
- оценку остаточной фазы (Ф) с использованием дискриминатора, и
- вычисление текущей фазы (θ) как суммы предшествующей фазы и текущей остаточной фазы (Ф).
Модуль алгоритма атмосферного мониторинга может включать в себя алгоритм процесса разности фаз, причем алгоритм процесса разности фаз является применяемым для реконструкции разности фаз с использованием


В варианте осуществления σϕ может быть вычислен по значениям Δ[n] с помощью фильтра, задаваемого посредством
для генерирования значений ϕ.
В варианте осуществления σϕ получают из  с помощью функции
с помощью функции
Согласно другому аспекту изобретения предоставляется способ измерения для генерирования атмосферных измерений на основании по меньшей мере одного радионавигационного сигнала от находящегося на борту спутника передатчика радионавигационной системы, причем способ содержит: предоставление модуля сбора данных, модуля демодулятора и модуля алгоритмов атмосферного мониторинга, размещенных в конфигурации разомкнутого цикла, причем, модуль сбора данных включает в себя опорный синхрогенератор, получение, с использованием модуля сбора данных, радионавигационного сигнала, а также генерирование из него нескольких IF отсчетов (r) промежуточной частоты, причем каждый отсчет имеет ассоциированную временную метку (TOW), полученную от опорного синхрогенератора, получение, с использованием модуля демодулятора, IF отсчетов (r), ассоциированных временных меток (TOW) и вспомогательных данных, относящихся к спутниковой системе, а также генерирование из них значений (Yi) коррелятора, и получение, с использованием модуля алгоритмов атмосферного мониторинга, значений (Yi) коррелятора, а также генерирование из них атмосферных измерений.
Согласно другому аспекту изобретения предоставляется записываемый, перезаписываемый или сохраняемый носитель, имеющий записанные или сохраненные на нем данные, задающие или поддающиеся преобразованию в команды для выполнения посредством вычислительных схем, которые соответствуют, по меньшей мере, этапам по п. 32 в прилагаемой формуле изобретения.
Согласно другому аспекту изобретения предоставляется серверный компьютер, содержащий коммуникационное устройство и запоминающее устройство, и выполненный для передачи по требованию или иным образом данных, задающих или поддающихся преобразованию в команды для выполнения посредством вычислительных схем, которые соответствуют, по меньшей мере, этапам по п. 32 в прилагаемой формуле изобретения.
Преимущество состоит в том, что в результате соответствующего использования некоторой вспомогательной информации, относящейся ко времени и положению приемника, и изменения способа вычисления атмосферных измерений, этап отслеживания может быть полностью обойден, что позволяет тем самым получить более устойчивую систему мониторинга.
Другое преимущество состоит в том, что путем действия в режиме разомкнутого цикла и путем устранения потребности в непрерывной и полной оценке фазы, варианты осуществления изобретения предоставляют по сравнению с традиционной архитектурой приемника гибкость по отношению к окружениям со слабым сигналом, устойчивое отслеживание в условиях чрезвычайно неблагоприятной ионосферной активности и более высокую доступность измерений.
Краткое описание чертежей
Варианты осуществления изобретения описываются посредством справочного примера к сопровождающим чертежам, на которых:
Фиг. 1 (уровень техники) является блок-диаграммой цифрового согласующего фильтра 102-1 обычного приемника, показывающей, каким образом локальные оценки фазы несущей частоты  и задержка кода измерения дальности
и задержка кода измерения дальности  используются для генерирования значений (Yi) [n] коррелятора,
используются для генерирования значений (Yi) [n] коррелятора,
Фиг. 2 (уровень техники) является блок-диаграммой типичной архитектуры отслеживания с обратной связью, изображающей контур для выполнения функций как контура 104 отслеживания несущей частоты, так и контура 106 отслеживания кода измерения дальности,
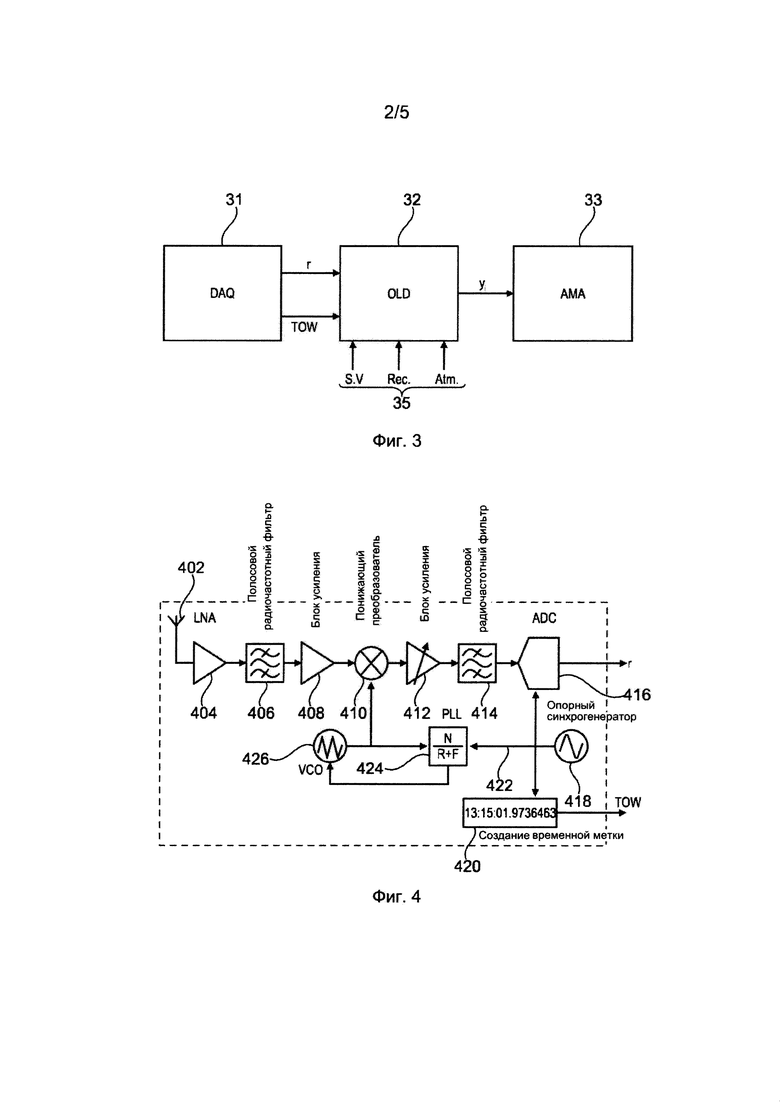
Фиг. 3 является блок-диаграммой системной архитектуры системы измерения согласно варианту осуществления изобретения,
Фиг. 4 является блок-диаграммой модуля 31 сбора данных на фиг. 3,
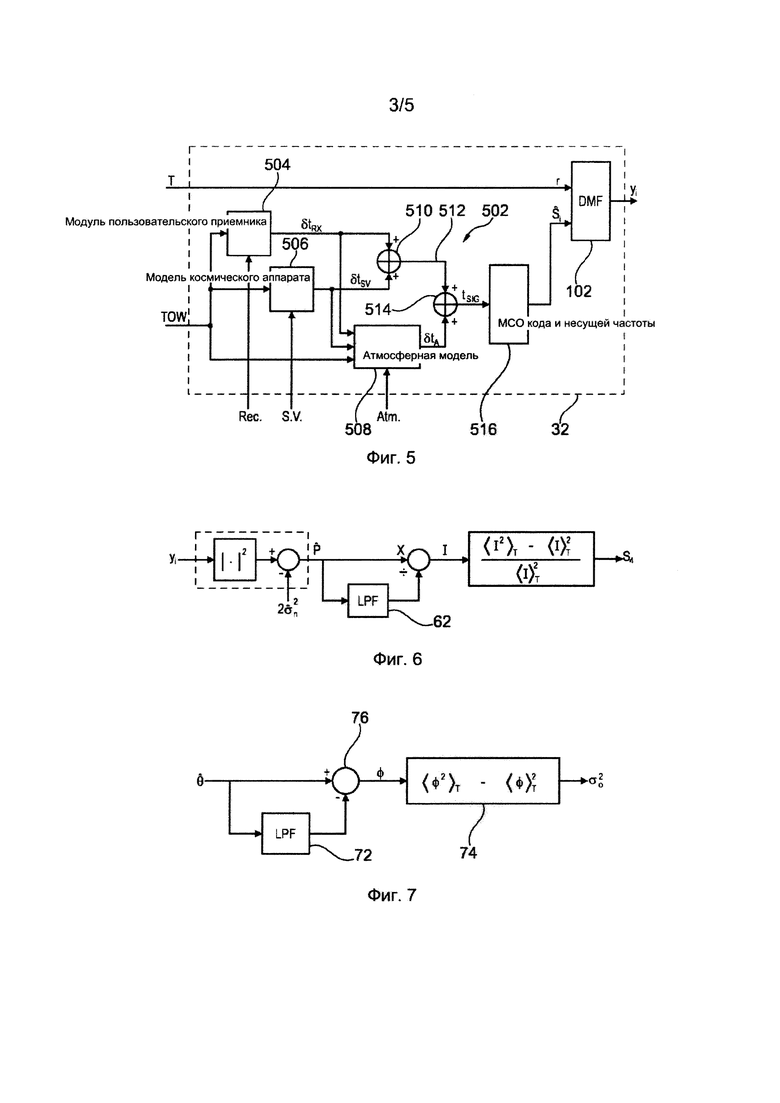
Фиг. 5 является блок-диаграммой модуля 32 демодуляции разомкнутого цикла на фиг. 3,
Фиг. 6 является блок-диаграммой процесса, выполняемого в модуле 33 АМА на фиг. 3, по вычислению значения S4 при заданной серии значений Yi коррелятора,
Фиг. 7 является блок-диаграммой процесса, выполняемого в модуле АМА 33 на фиг. 3, по вычислению значения σϕ при заданной серии значений оценок фазы,
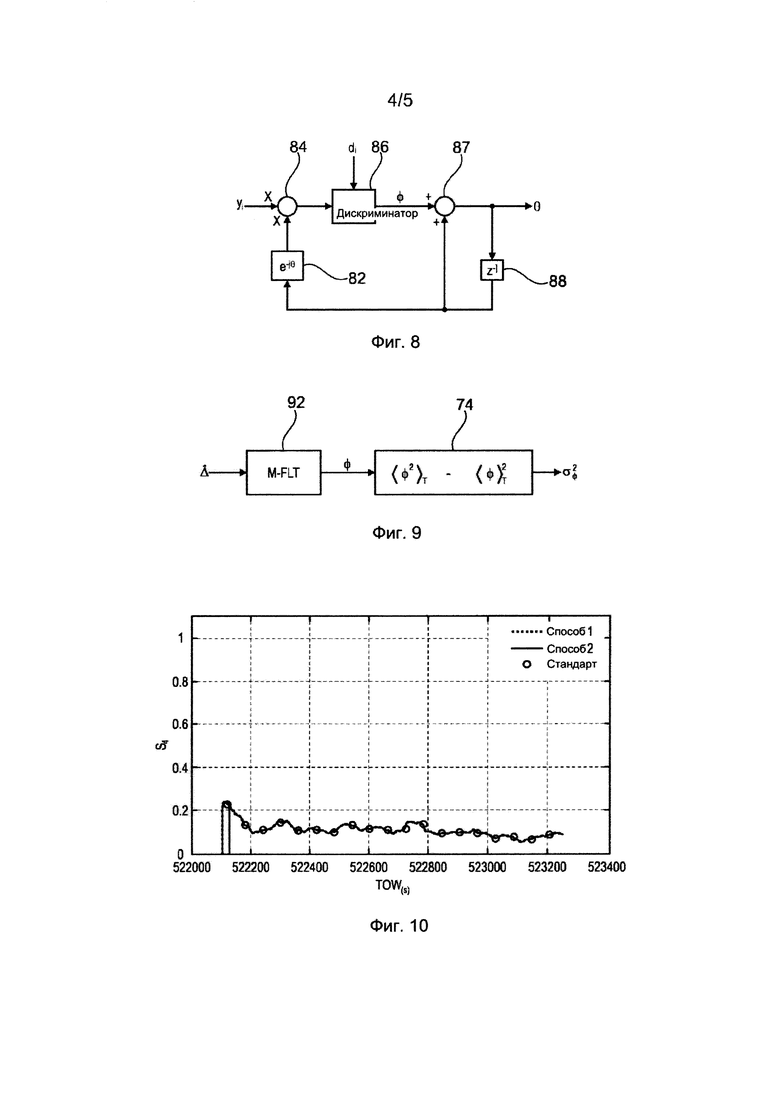
Фиг. 8 является блок-диаграммой процесса, выполняемого в модуле АМА 33 на фиг. 3, по реконструкции фазы по значениям (Yi) коррелятора, который вычисляет текущую фазу,
Фиг. 9 является блок-диаграммой процесса, выполняемого в модуле АМА 33 на фиг. 3, по вычислению значения σϕ при заданной серии оценок разности фаз,
Фиг. 10 является графиком S4 по времени при вычислении как способом 1, так и способом 2, с использованием алгоритма, изображенного на фиг. 6, и со сравнением со стандартным значением, получаемым посредством коммерчески доступного приемника атмосферного мониторинга, и
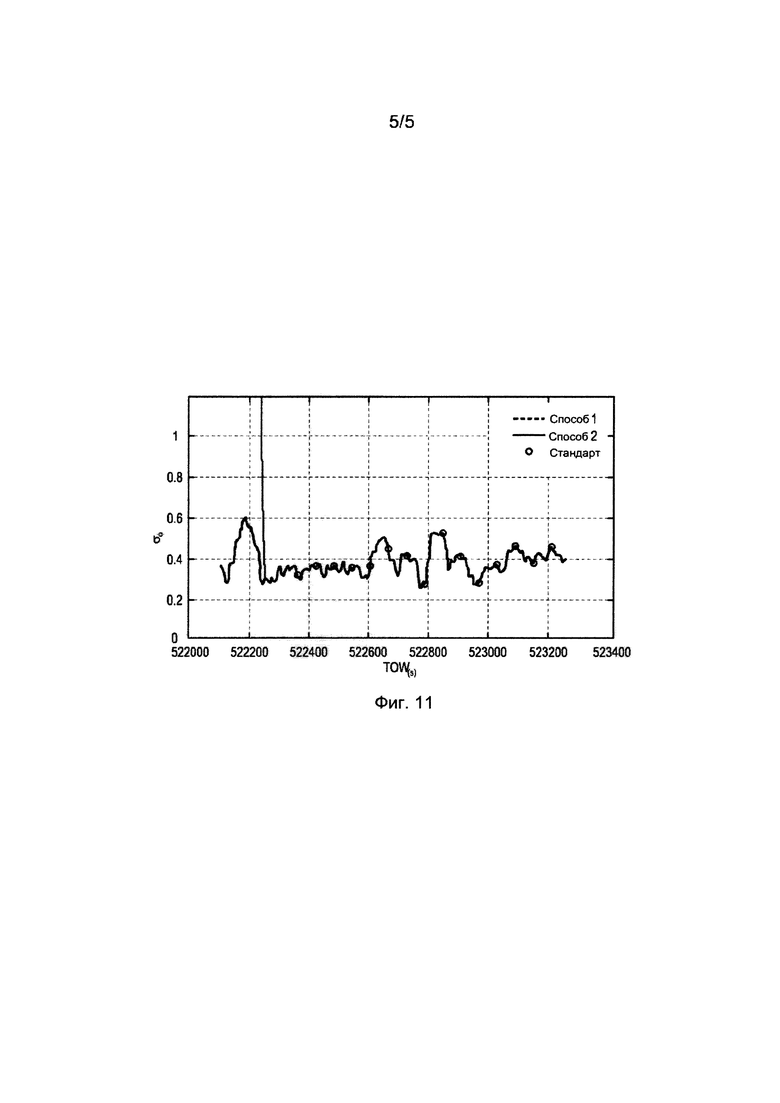
Фиг. 11 является графиком σϕ по времени при вычислении как способом 1, так и способом 2, выполняемым модулем 33 АМА на фиг. 3 с помощью алгоритмов, изображенных на фиг. 7 и фиг. 9, и со сравнением со стандартным значением, получаемым посредством коммерчески доступного приемника атмосферного мониторинга.
Подробное описание вариантов осуществления
Фиг. 3 является блок-диаграммой системной архитектуры системы измерения согласно варианту осуществления изобретения.
Архитектура системы может быть организована в трех главных блоках: сбора данных (DAQ) 31, демодулятора (OLD) 32 разомкнутого цикла, а также алгоритмов атмосферного мониторинга (АМА) 33.
Для преодоления проблем и недостатков, связанных с архитектурами отслеживания замкнутого цикла с упреждающим сигналом или обратной связью в приемниках ГНСС, варианты осуществления настоящего изобретения используют архитектуру разомкнутого цикла. Вариант осуществления изобретения содержит, как изображено на фиг. 3, следующие компоненты: модуль (DAQ) 31 сбора данных, демодулятор (OLD) 32 разомкнутого цикла и модуль (АМА) 33 алгоритмов атмосферного мониторинга, содержащий ряд алгоритмов атмосферного мониторинга. Как более подробно обсуждено ниже, модуль DAQ 31 получает необработанные данные (например, сигналы ГНСС) и выпускает IF отсчеты (r), каждый из которых имеет ассоциированную временную метку (TOW). Демодулятор 32 получает r и TOW и, на их основе, а также на основе вспомогательных данных (в основном, обозначенных 35), генерирует значения Yi коррелятора, которые выпускаются к модулю АМА 33.
Фиг. 4 является блок-диаграммой модуля 31 сбора данных на фиг. 3.
Изображенный на фиг. 4 модуль 33 DAQ выполняет задачи по получению от антенны 402 отсчетов (r) промежуточной частоты для одного или нескольких диапазонов ГНСС. Полученные на антенне 402 сигналы усиливаются посредством малошумящего усилителя (LNA) 404, проходят через полосовой радиочастотный фильтр 406 и другой усилитель 408 к понижающему преобразователю 410, который преобразовывает их к промежуточной частоте. Выход IF сигналов от понижающего преобразователя 410 подвергается дальнейшему усилению в блоке 412 усиления и проходит через полосовой фильтр 414 промежуточной частоты, прежде чем быть преобразованным к цифровым (IF) отсчетам r в ADC 416. Точный опорный синхрогенератор 418 используется для понижающего преобразования и оцифровывания отсчетов таким образом, что временная метка, которая является точно синхронизованной с UTC или с особым системным временем ГНСС, и которая обозначена в настоящем документе как TOW 420, предоставляется для каждого IF отсчета r. Синхросигнал 422 от опорного синхрогенератора 418 предоставляется к PLL 424, образующему контур с VCO 426, а выход VCO 426 подается к понижающему преобразователю 410 для генерирования IF сигналов. (Как очевидно специалистам в данной области техники, IF данные могут быть либо транслированы непосредственно к модулю OLD 32 (фиг. 3) для обработки в режиме реального времени, либо транслированы к диску хранения для последующей обработки.) Главным признаком DAQ является опорный синхрогенератор 418. Предпочтительно, опорный синхрогенератор 418 точно синхронизирован с UTC или с особым системным временем ГНСС, или его смещение является хорошо известным. Тем не менее, в предпочтительных вариантах осуществления, является необходимым отсутствие упорядочивания опорного синхрогенератора 418 непосредственно от системы ГНСС в процессе сбора данных, поскольку это нарушает принцип разомкнутого цикла, на основе которого действуют варианты осуществления системы. Конкретные варианты опорного синхрогенератора 418 в составе DAQ 31 более подробно обсуждаются ниже.
Возвращаясь к фиг. 3, модуль OLD 32 принимает в качестве входов IF отсчеты r и ассоциированные временные метки (TOW и r) от DAQ 31, а также вспомогательную информацию 35, в настоящем варианте осуществления последняя включает в себя спутниковые эфемериды, информацию о положении приемника и атмосферную информацию, соответственно обозначаемые S.V., Rec. и Aim. на фиг. 3, хотя могут использоваться один, некоторые или все упомянутые элементы. Предпочтительно, для каждого отсчета r, соответствующая ему TOW используется совместно с информацией 35 по S.V., Rec. и Atm. для предсказания значений полученных параметров сигнала, обозначаемых  и
и  . По существу, эта информация может использоваться для предсказания канала распространения, состоящего из геометрического диапазона, релятивистских эффектов, любых известных и/или детерминированных атмосферных эффектов, спутникового опорного синхрогенератора, а также аппаратных погрешностей и любых известных погрешностей приемника. Эти параметры сигнала затем передаются к DMF, который может быть представлен стандартным DMF 102, как изображено на фиг. 1, для получения значений Y[n] коррелятора. DMF 102 выполняет устранение несущей частоты и кода измерения дальности, а также последующую операцию сведения и вывода для получения значений Y[n] коррелятора. Согласно фазовому процессу, описанному в выражении (2), процессы θLOS(t) и θSVClk.(t) удаляются, оставляя только то, что соответствует атмосферным и остаточным ошибкам, происходящим от ошибок в спутниковых эфемеридах. По меньшей мере одно значение Y[n] коррелятора является источником для каждого сигнала, полученного в пределах IF данных для каждого видимого спутника, хотя могут быть генерированы дополнительные значения коррелятора, соответствующие особым смещениям в одном или в обоих параметрах из числа задержки кода измерения дальности или фазы несущей частоты.
. По существу, эта информация может использоваться для предсказания канала распространения, состоящего из геометрического диапазона, релятивистских эффектов, любых известных и/или детерминированных атмосферных эффектов, спутникового опорного синхрогенератора, а также аппаратных погрешностей и любых известных погрешностей приемника. Эти параметры сигнала затем передаются к DMF, который может быть представлен стандартным DMF 102, как изображено на фиг. 1, для получения значений Y[n] коррелятора. DMF 102 выполняет устранение несущей частоты и кода измерения дальности, а также последующую операцию сведения и вывода для получения значений Y[n] коррелятора. Согласно фазовому процессу, описанному в выражении (2), процессы θLOS(t) и θSVClk.(t) удаляются, оставляя только то, что соответствует атмосферным и остаточным ошибкам, происходящим от ошибок в спутниковых эфемеридах. По меньшей мере одно значение Y[n] коррелятора является источником для каждого сигнала, полученного в пределах IF данных для каждого видимого спутника, хотя могут быть генерированы дополнительные значения коррелятора, соответствующие особым смещениям в одном или в обоих параметрах из числа задержки кода измерения дальности или фазы несущей частоты.
Модуль 33 АМА в качестве входа принимает значения коррелятора Y[n], сгенерированные посредством модуля 32 OLD и использует их для получения различных измерений атмосферы. Модуль может реализовать ряд алгоритмов, предоставляющих информацию относительно состояния атмосферы или уровней атмосферной активности. Конкретно, модуль 33 АМА может выполнять генерирование измерений, относящихся к ионосферной активности, включая сюда такие, которые описывают или количественно характеризуют сцинтилляцию. Хотя многие приемники используют как значения Y[n] коррелятора, так и полную оценку фазы путем использования характеристик алгоритмов, модуль 33 АМА может реализовывать стандартные ионосферные алгоритмы измерения с помощью одних только Yi.
Согласно фиг. 4 модуль 31 DAQ содержит антенну 402 приемника и обрабатывает полученные радиочастотные сигналы ГНСС. Выход этого блока является точно привязанным по времени потоком цифровых данных ГНСС (r, TOW). Последний является по существу цифровым представлением сигнала ГНСС, поскольку он получен антенной, где каждый отсчет r соединен с точной временной меткой TOW. Время может быть выражено в локальном временном интервале (приемник) или в отдаленном временном интервале (космический аппарат, передатчик). В любом случае, представляющий текущее время локальный счетчик может увеличивать свое значение по мере регистрации каждого отсчета r сигнала IF посредством аналого-цифрового преобразователя 416. Значение этого счетчика образует пару с тем отсчетом r, который представляет временная метка TOW.
Предпочтительно, для собирания IF данных и для генерирования временных меток (TOW) используется достаточно точный опорный синхрогенератор 418. Более предпочтительно, для мониторинга сцинтилляции опорный синхрогенератор 418 должен иметь очень низкий фазовый шум. Варианты осуществления настоящего изобретения также налагают второе требование к дрейфу опорного синхрогенератора и характеристикам скорости дрейфа, которые должны быть достаточно стабильными для соответствия известной модели для всей протяженности операции по сбору данных. Необходимая степень синхронизации с данным временным интервалом ГНСС выявляется по регистрируемым характеристикам сигнала, и номинально принимается менее одной десятой от периода микросхемы кода измерения дальности. Согласно вариантам осуществления могут быть применены различные реализации, как изложено ниже.
Например, действующая реализация изобретения использует средство предварительной обработки данных ГНСС и цифровой преобразователь. Обычно такая система составлена из блока предварительной обработки сигнала (предусилители и фильтры), одного или нескольких синтезаторов и смесителей, фильтров защиты от наложения спектров и аналого-цифрового преобразователя (ADC). Используемый для настройки локальных осцилляторов опорный синхрогенератор также должен приводить в действие ADC. Послеоперационная реализация включает в себя потоковую передачу данных из файла, ранее захваченного с помощью цифрового преобразователя ГНСС.
Процесс создания временных меток для потока отсчетов ГНСС приводится в действие посредством единственного опорного синхрогенератора 418, как изображено на фиг. 4. Является существенным, что этот синхрогенератор синхронизирован с временным интервалом ГНСС и, что он может быть использован для продвижения оценки времени для генерирования временных меток с очень высокой точностью (≈1 наносекунда).
В одном варианте осуществления используется идеальный (то есть, идеально смоделированный) опорный синхрогенератор 418. В этом случае модуль 31 DAQ просто продвигает время от единственной точки синхронизации в прошлом с использованием предсказуемого периода дискретизации.
Другой вариант осуществления включает в себя использование упорядоченного осциллятора (DO). В этом случае модуль 31 DAQ требует поддержания генератором опорного сигнала синхронизации на протяжении промежутка времени получения данных. Упорядоченные осцилляторы в основном содержат внутренний осциллятор и используют внешний стандарт частоты для обеспечения корректировок или регулировок для внутреннего осциллятора. Одним общим источником внешнего стандарта частоты является сигнал ГНСС. В случае, когда упорядочивание действительно происходит от ГНСС (то есть, используется GPS упорядоченный осциллятор (GPSDO)), выполнение упорядочивания должно быть обеспечено прежде начала процесса сбора данных. Кроме того, устройству должен быть обеспечен достаточно хороший резерв по производительности для поддержания синхронизации в течение всего процесса сбора данных. Само собой разумеется, в такой реализации в качестве опорного синхрогенератора может быть применен стандартный, серийный GPSDO, а действие по упорядочиванию может быть отключено во время периода сбора данных.
В другом варианте осуществления, в котором используется опорный синхрогенератор свободного хода, динамическое моделирование его неизвестных параметров (то есть, дрейфа и скорости дрейфа) выполняется с помощью специализированного алгоритма оценки опорного синхрогенератора. В сущности, это является эквивалентом варианту осуществления предыдущего абзаца, в том смысле, что система ГНСС используется в качестве опорной системы, по которой оцениваются неизвестные параметры опорного синхрогенератора. Тем не менее, вместо попыток регулировать или упорядочивать осциллятор, предполагаемые параметры опорного синхрогенератора просто измеряются, и используются для более точного продвижения временных меток от начальной точки синхронизации. Особым случаем этого является последующая обработка ранее полученных данных. Данные пост-обрабатываются, и один или несколько сигналов спутника, которые представляются незатронутыми или только слабо затронутыми атмосферной аномалией при проведении испытания, могут быть использованы для оценки неизвестных параметров опорного синхрогенератора. Следует обратить внимание на то, что комплекты спутников, используемых для оценки неизвестных параметров опорного синхрогенератора, и используемых для мониторинга атмосферы, должны быть взаимоисключающими. Этот подход широко использовался для проверки результатов по отношению к заархивированным ранее по времени файлам сцинтилляции без использования признака создания точных временных меток.
Три вышеупомянутых варианта осуществления опорного синхрогенератора 418 представляют собой средства продвижения начальной точки синхронизации от начальной временной метки вперед во времени. Во всех случаях должна быть достигнута эта начальная синхронизация во времени. В вариантах осуществления это сделано путем обработки выхода r из DAQ 31. Данные отсчеты могут обрабатываться, как это сделано в типичном приемнике ГНСС, когда традиционные алгоритмы с обратной связью применяются к импульсам r, и вычисляется привязка по положению и времени. Такая привязка по времени предоставляет начальную точку синхронизации для процесса создания временных меток.
Фиг. 5 является блок-диаграммой модуля 32 демодуляции разомкнутого цикла на фиг. 3.
Модуль (OLD) 32 демодуляции разомкнутого цикла обрабатывает IF отсчеты r, произведенные модулем 31 DAQ для получения значений Yi коррелятора. Необходимые входы к модулю 32 OLD предпочтительно включают в себя: поток с точными временными метками цифровых данных ГНСС (r, TOW), пользовательскую динамику, динамику космического аппарата (включающую в себя бортовой опорный синхрогенератор) и атмосферные задержки. Следует обратить внимание на то, что вызванные на стороне приемника задержки моделируются/поглощаются временными метками TOW отсчетов IF. Модуль производит в качестве выходных величин значения Yi коррелятора для каждого из видимых сигналов спутника. Типичный период когерентного интегрирования составляет 1 мс, однако более общая реализация может использовать более короткие или длительные периоды.
OLD 32, как он изображен на фиг. 5, составлен из двух основных подблоков: синтезатора 502 сигналов ГНСС и DMF 102. Синтезатор воспроизводит сигналы спутника, как они наблюдаются на приемной антенне 402 (фиг. 4) в конкретном пользовательском местоположении и времени. Для обеспечения такой возможности, траектория движения пользовательской антенны 402 должна быть либо нулевой, либо точно известной. Это достигается путем обеспечения входа, обозначенного как «Rec» на фиг. 5, который представляет кусочно-непрерывную траекторию антенны 402 приемника в землецентричной и неподвижной относительно земли системе координат. OLD 32, соответствующим образом, содержит модель пользовательского приемника для получения временной метки (TOW) и входа Rec, а модуль 504 пользовательского приемника выпускает задержку Δ(t)RX.
Динамика спутникового сигнала генерируется с помощью орбитальных параметров и корректировок опорного синхрогенератора, объединенных с точной привязкой по времени. Параметры этой модели траектории обозначены на фиг. 5 переменной «S.V.». Эти орбитальные параметры, зачастую называемые эфемеридами, могут принимать вид комплекта радиовещательных эфемерид, как они предоставляются ГНСС, комплекта третьей стороны, так называемых точных эфемерид, или любой другой подходящей модели траектории. Типичными примерами являются радиовещательные комплекты кеплеровских параметров, используемых для GPS, Galileo и BeiDou, или модель декартовских положений и производных, используемая для ГЛОНАСС, другие опции включают в себя точные эфемеридные модели, предоставляемые третьими сторонами, такими как Международная служба ГНСС (IGS). OLD 32, соответствующим образом, также включает в себя модель 506 космического аппарата, причем модель 506 космического аппарата приспособлена для получения временной метки (TOW) и орбитальных параметров (S.V.), а также для генерирования относящейся к космическому аппарату задержки δtSV. Наконец, каждая из оценок атмосферных задержек производится с помощью другой модели, соответствующим образом параметризированной с использованием известных значений или вспомогательной эфемеридной информации, которая информация обозначена на фиг. 5 посредством переменной «Atm.». Типичные модели включают в себя, среди многих прочих, модели Klobuchar (Клобушара) или NeQuick (Неквика) для ионосферы, и модель Saastamoinen (Саастамойнена) для тропосферы. Атмосферная модель 508 приспособлена для получения временной метки (TOW), соотнесенной с приемником временной задержки (δtRX), соотнесенной с космическим аппаратом временной задержки (δtSV) и эфемеридной информации (Atm). По этим данным атмосферная модель 508 генерирует соотнесенную с атмосферой временную задержку (δtA).
OLD 32 включает в себя первый суммирующий элемент 510 для генерирования первой суммы 512, содержащей сумму соотнесенной с приемником задержки (δtRX) и соотнесенной с космическим аппаратом задержки (δtSV). Кроме того, второй суммирующий элемент 514 выполнен для генерирования второй суммы, содержащей сумму первой суммы 512 и соотнесенной с атмосферой временной задержки (δtA) с целью генерирования соотнесенной с сигналом временной задержки (tSIG). Соотнесенная с сигналом временная задержка (tSIG) является вводом для МСО кода и несущей частоты 516 с целью генерирования оценки  для входа к DMF 102.
для входа к DMF 102.
DMF 102 выполняет дераспределение и накопление потока входного сигнала по отношению к имитированной копии сигнала, как изображено на фиг. 1. Данный этап в значительной степени походит на действие корреляторного механизма в типичном приемнике ГНСС с обратной связью, как изображено на фиг. 2, с тем отличием, что отсутствует какая-либо операция обратной связи. Выгодным образом, настоящее изобретение основывается только на измерениях амплитуды, задержки и изменений фазы, обнаруживаемых в полученном сигнале, и не основывается на каком-либо механизме обратной связи, который обнаруживает выходы коррелятора Yi, которые могут, в свою очередь, быть затронуты имеющимися аномалиями. В одном варианте осуществления DMF 102 используется только по одному коррелятору на каждый спутниковый сигнал, но концепция является более общей, и может быть использовано произвольное число корреляторов. В другом варианте осуществления реализуются несколько корреляторов, размещенных с интервалами, как по частоте, так и по задержке вокруг центрированного по номиналу коррелятора для предоставления более устойчивой и точной оценки полученных параметров сигнала. В вариантах осуществления реализация включает в себя классическую, в реальном времени, или последующую обработку.
В OLD 32 интерфейс между двумя подблоками (синтезатором 502 сигнала и DMF 102) является последовательностью должным образом рассчитанной по времени задержки кода и фазы несущей частоты, соответственно  и
и  . Обе последовательности соотнесены геометрическому расстоянию по линии (LOS) прямой видимости между пользователем и антенной навигационного спутника, но имеются существенные различия, вследствие того, среди других факторов, что атмосфера является дисперсионной средой. При использовании точного времени рабочего цикла накапливающий сумматор может быть разгружен в любой момент, но обычно это делается синхронизированным с достижением краев распределяющего кода образом. Кроме того, при наличии доступа к радиовещательным навигационным сообщениям, значительный участок навигационного сообщения может быть предсказан, что позволяет выполнять устранение битов на полученном сигнале. Когда это является возможным, такой процесс значительно улучшает реконструкцию фазы, как это обсуждается в следующем разделе.
. Обе последовательности соотнесены геометрическому расстоянию по линии (LOS) прямой видимости между пользователем и антенной навигационного спутника, но имеются существенные различия, вследствие того, среди других факторов, что атмосфера является дисперсионной средой. При использовании точного времени рабочего цикла накапливающий сумматор может быть разгружен в любой момент, но обычно это делается синхронизированным с достижением краев распределяющего кода образом. Кроме того, при наличии доступа к радиовещательным навигационным сообщениям, значительный участок навигационного сообщения может быть предсказан, что позволяет выполнять устранение битов на полученном сигнале. Когда это является возможным, такой процесс значительно улучшает реконструкцию фазы, как это обсуждается в следующем разделе.
Модуль 33 (АМА) алгоритмов атмосферного мониторинга (фиг. 3) принимает в качестве входов комплексные значения Y[n] коррелятора от модуля OLD 32, и производит в качестве выходов атмосферные измерения. В последующем обсуждаются варианты осуществления модуля мониторинга ионосферной сцинтилляции, который производит общие индексы мерцания, включая сюда S4 и σϕ, как задано ниже.
Широко распространенные параметры для характеристики сцинтилляции представляют собой S4 для амплитуды и σϕ для фазы несущей частоты. Обычно вычисление S4 требует вычисления по значениям Y[n] коррелятора промежуточного параметра, обозначаемого I. Во многих случаях это зачастую реализуется посредством дополнительных промежуточных переменных, которые называют мощностью узкого диапазона (NBP) и мощностью широкого диапазона (WBP). Альтернативно, в других реализациях вычисления производятся непосредственно по значениям коррелятора, как изображено на фиг. 6. Из значений I в большинстве случаев исключают тренд с использованием фильтра Баттерворта низких частот 6-го порядка с шириной полосы 0,1 Гц, причем по причинам численной устойчивости, фильтр реализован в виде каскадной группы из фильтров 2-го порядка, и обозначен как LPF 62 на фиг. 6.
Фиг. 7 показывает блок-диаграмму выполняемого в модуле 33 АМА на фиг. 3 процесса вычисления значения σϕ, при заданной серии оценок фазы  .
.
Общепринятый способ вычисления σϕ включает в себя три этапа, как представлено ниже. Во-первых, фаза полученного сигнала ГНСС реконструируется и дискретизируется при фиксированной частоте дискретизации для получения эквивалентного процесса θ[n]=θ(nT1). Во-вторых, в ней исключается тренд с использованием фильтра Баттерворта высоких частот 6-го порядка с шириной полосы 0,1 Гц. Наконец, вычисляется величина отклонения фазового процесса с исключенным трендом (блок 74) по конечным неперекрывающимся блокам с периодом  секунд. Таким образом, выходы комплексного коррелятора быстрой копии (или скорее их побочные продукты) используются для оценки аномалий амплитуды, тогда как измерения фазы несущей частоты используются для измерения фазовых аномалий. Как изображено на фиг.7, фильтр высоких частот реализован в виде разницы (посредством суммирующего элемента 76) между сигналом и низкочастотной компонентой, сгенерированной в результате фильтрации посредством LPF 72.
секунд. Таким образом, выходы комплексного коррелятора быстрой копии (или скорее их побочные продукты) используются для оценки аномалий амплитуды, тогда как измерения фазы несущей частоты используются для измерения фазовых аномалий. Как изображено на фиг.7, фильтр высоких частот реализован в виде разницы (посредством суммирующего элемента 76) между сигналом и низкочастотной компонентой, сгенерированной в результате фильтрации посредством LPF 72.
Следует отметить, что стандартный приемник ГНСС получает наблюдения фазы несущей частоты с помощью алгоритма отслеживания фазы замкнутого цикла, такого как PLL. Напротив, в варианте осуществления настоящего изобретения для вычисления σϕ применены два новых подхода. Преимущества отсутствия отслеживания фазы полученного сигнала с помощью замкнутого цикла включают в себя: изоляцию вычисления индекса сцинтилляции от артефактов фильтра контура отслеживания, а также устранение проблем, связанных с неполадками отслеживания фазы (например, проскальзываниями цикла) в условиях очень слабого сигнала.
Оба варианта осуществления способов для вычисления σϕ используют то обстоятельство, что реконструированная фаза сразу появляется с исключенным трендом. Как отмечено выше, модуль 32 OLD посредством синтеза сигнала удаляет все известные детерминированные составляющие из фазы несущей частоты, включая сюда динамику линии (LOS) прямой видимости, спутниковый опорный синхрогенератор и известные атмосферные составляющие. Остаются остаточные ошибки, происходящие от эфемерид и атмосферных моделей, а также другая составляющая фазы от локального осциллятора. Цель процесса исключения тренда состоит в удалении составляющих всех факторов кроме θAtm.(t) и, поэтому, процесс реконструкции фазы должен представлять только этот параметр. Два варианта осуществления представлены следующим образом.
Способ 1: Реконструкция фазового процесса.
Фиг. 8 показывает блок-диаграмму выполняемого в модуле 33 АМА на фиг. 3 процесса реконструкции фазы по значениям Yi коррелятора, вычисляющего текущую фазу как сумму предшествующей фазы и остатка фазы, наблюдаемого при устранении поворота текущего коррелятора в результате предшествующей оценки фазы. Обозначение е-jθ представляет единичный вектор на комплексной плоскости, располагающийся под углом -θ относительно вещественной оси, а обозначение z-1 представляет задержку одного отсчета. В этом случае полезная часть фазового процесса реконструируется посредством накопленной суммы разностей фаз, вычисленных по последовательным парам значений коррелятора (то есть, Y[n-1] и Y[n]). Как показано на фиг. 8, в значениях Yi коррелятора устраняется поворот (посредством входа блока 82 к первому мультиплицирующему элементу 84) в результате предшествующей оценки фазы, и измеряется остаточная фазовая погрешность. Блок 84 дискриминатора представляет функцию фазового дискриминатора, описанную в выражении 4. Полная оценка θ фазы предоставляется путем накопления этих остаточных измерений фазы. Результирующий фазовый процесс может быть обработан образом, подобным реализуемому посредством типичного приемника ГНСС. Наиболее существенную составляющую в измерение фазы несущей частоты вносит скорость LOS между пользователем и антенной спутника, а также разность между дрейфами опорных синхрогенераторов пользователя и спутника. Обычно при использовании измерений фазы от традиционного приемника, этот вклад отфильтровывается посредством фильтра исключения тренда ценой того, что время сходимости перестает быть пренебрежимо малым. Действительно, время сходимости такого фильтра может иметь порядок минут. Настоящая методика естественным образом устраняет эту составляющую фазы. Результаты показывают, что при номинальных шумовых условиях тот же фильтр исключения тренда приводит точно к тем же результатам, как на общепринятом фазовом процессе, так и на процессе по способу 1, но в последнем случае сходимость является намного более быстрой.
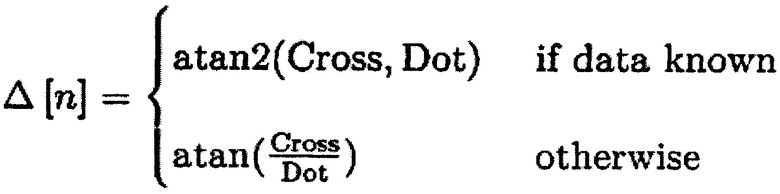
Конкретно, фазовый процесс реконструируется следующим образом. Во-первых, в текущих значениях коррелятора устраняется поворот в результате предшествующей оценки фазы (которая для первого отсчета инициализируется на нуле). Во-вторых, остаточная фаза Ф оценивается либо когерентным (четырехквадрантный арктангенс) или некогерентным (арктангенс) дискриминатором 86, в зависимости от того, является ли известным знак бита данных, соответствующего текущему отсчету. Значение текущей фазы Ф затем вычисляют как сумму (посредством суммирующего элемента 87) предшествующей фазы (полученной посредством применения блока 88) и текущей остаточной фазы Ф. Математически, этот процесс может быть представлен как:


где d[n] является значением текущего бита данных, и предполагается, что фазовый процесс может быть разложен на рекурсивное суммирование разностей фаз, как: θ[n]=θ[n-1]+Δ[n], обозначение  and
and  соответственно обозначает действительные и мнимые части
соответственно обозначает действительные и мнимые части  , а функции atan
, а функции atan  и
и  соответственно обозначают функции арктангенса и четырехквадрантного арктангенса. Обработка этой оценки фазы для получения измерения σϕ затем следует стандартному алгоритму, изображенному на фиг. 7.
соответственно обозначают функции арктангенса и четырехквадрантного арктангенса. Обработка этой оценки фазы для получения измерения σϕ затем следует стандартному алгоритму, изображенному на фиг. 7.
Способ 2: Измененный фильтр исключения тренда.
Фиг. 9 является блок-диаграммой выполняемого в модуле 33 АМА на фиг. 3 процесса вычисления значения σϕ при заданной серии оценок  разности фаз. Второй подход извлекает выгоду из того обстоятельства, что фильтр высоких частот 6-го порядка с шириной полосы 0,1 Гц по существу удаляет всю медленно-переменную динамику фазы несущей частоты. Это указывает на целесообразность полного устранения процесса реконструкции фазы, а также использования вместо абсолютной фазы разности фаз. Порядок фильтра исключения тренда может быть уменьшен на единицу, и эквивалентный, но более простой фильтр генерирует точно те же результаты, что и получаемые в рамках обычного подхода. Этот новый фильтр находят следующим образом. Допустим, традиционный высокочастотный фильтр Баттерворта 6-го порядка имеет передаточную функцию с z-областью значений, задаваемую как:
разности фаз. Второй подход извлекает выгоду из того обстоятельства, что фильтр высоких частот 6-го порядка с шириной полосы 0,1 Гц по существу удаляет всю медленно-переменную динамику фазы несущей частоты. Это указывает на целесообразность полного устранения процесса реконструкции фазы, а также использования вместо абсолютной фазы разности фаз. Порядок фильтра исключения тренда может быть уменьшен на единицу, и эквивалентный, но более простой фильтр генерирует точно те же результаты, что и получаемые в рамках обычного подхода. Этот новый фильтр находят следующим образом. Допустим, традиционный высокочастотный фильтр Баттерворта 6-го порядка имеет передаточную функцию с z-областью значений, задаваемую как:

где выход выражения (5) является фазовым процессом с исключенным трендом, обозначенным здесь θD[n], и находимым путем применения H(z) к восстановленной фазе θ[n]. Этот фильтр является тождественно эквивалентным каскадному процессу применения фильтра B(z) к θ(t) и последующему применения фильтра 1/A(z) к результату. Поэтому, фазовый процесс θ[n] подвергается воздействию только со стороны B(z).
В момент n выход фильтра B(z), примененный к θ[n] и обозначенный здесь θB[n] принимает вид:

Опять-таки, при принятии разложения фазового процесса на сумму разностей фаз, выражение (6) принимает вид:
С учетом того, что H(z) является высокочастотным фильтром и имеет нулевой коэффициент усиления постоянной составляющей, Н(1)=0 и, таким образом,

а (7) сводится к:
где

принимая во внимание (8), находим, что c6=0 и, таким образом,

Тем самым показано, что фазовый процесс θD с исключенным трендом, полученный путем обработки исходного фазового процесса θ с помощью фильтра H(z) является тождественно эквивалентным процессу, полученному путем обработки процесса Δ[n]=θ[n]-θ[n-1] разности фаз с помощью нового фильтра, задаваемого как:

Значение выражения (12) состоит в том, что отсутствует необходимость в реконструкции какого-либо фазового процесса и, что требуется только оценка разности фаз для двух смежных значений коррелятора. Это значительно упрощает генерирование σϕ и позволяет создать значительно более устойчивый алгоритм мониторинга. Конкретным образом, в одном варианте осуществления, реконструкция процесса разности фаз включает в себя:



где используется одно из двух средств оценки разности фаз, в зависимости от того, является ли известным бит данных обоих значений коррелятора. После генерирования такого процесса разности фаз может быть применен измененный фильтр и, наконец, может быть вычислена оценка σϕ. Процесс вычисления σϕ по значениям Δ[n] изображен на фиг. 9, причем, маркированный «М-FLT» блок представляет описанный в настоящем документе измененный фильтр.
Хотя в последующем принята простая прямая оценка разности фаз, как она задана выражением (13), в альтернативных вариантах осуществления для усиления оценки Δ[n] может быть предпринята последующая обработка значений коррелятора. Например, оценка может быть улучшена с помощью априорных статистических моделей фазового процесса, может быть реализована схема для отклонения или для исправления оценок, которые представляются выбросами или грубыми ошибками, также могут наблюдаться множественные последовательные значения коррелятора, три или более.
Сравнение σϕ и S4 по результатам вычислений посредством способа 1 и способа 2, а также посредством коммерчески доступного (стандартного) приемника для атмосферного мониторинга приведены на фиг. 10 и фиг. 11, соответственно, причем следует отметить, что алгоритм мониторинга разомкнутого цикла способен к идеальному воспроизводству такового традиционного приемника с обратной связью.
Хотя варианты осуществления были описаны в отношении вариантов осуществления, имеющих различные компоненты в их соответствующих реализациях, подразумевается, что другие варианты осуществления используют другие комбинации и перестановки этих и других компонентов.
Кроме того, некоторые варианты осуществления описаны в настоящем документе в качестве способа или комбинации элементов способа, который может быть реализован процессором компьютерной системы или другими средствами выполнения функции. Таким образом, процессор с необходимыми командами для выполнения такого способа или элемента способа образует средства для выполнения способа или элемента способа. Кроме того, описанный в настоящем документе элемент варианта осуществления устройства является примером средства для выполнения функции, выполняемой элементом в целях реализации изобретения.
В предоставленном в настоящем документе описании сформулированы многочисленные специфические подробности. Тем не менее, подразумевается, что варианты осуществления изобретения могут быть осуществлены без этих специфических подробностей. В других примерах известные способы, конструкции и методы не показаны подробно во избежание затруднений в понимании этого описания.
Таким образом, хотя здесь описаны подразумеваемые в качестве предпочтительных варианты осуществления изобретения, специалистам в данной области техники понятно, что в нем могут быть сделаны другие и отличные модификации без отступления от сущности и объема изобретения, и настоящий документ предназначен для заявления всех таких изменений и модификаций, попадающих в пределы объема изобретения. Например, любые приведенные выше формулы являются всего лишь примерами процедур, которые могут быть использованы. Функциональность может быть добавлена к блок-диаграммам или удалена из них, а операции могут менять свое расположение среди функциональных блоков. Этапы могут быть добавлены к описанным в рамках настоящего изобретения способам или удалены из них.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПУТНИКОВЫЕ РАДИОНАВИГАЦИОННЫЕ СИГНАЛЫ С ЦИФРОВОЙ ПОДПИСЬЮ | 2014 |
|
RU2635368C2 |
| Многочастотный приемник сигналов Глобальных Навигационных Спутниковых Систем | 2021 |
|
RU2787076C1 |
| СИСТЕМА ВРЕМЕННОЙ СИНХРОНИЗАЦИИ И УСТРОЙСТВО ПЕРЕДАЧИ | 2017 |
|
RU2758033C2 |
| СПОСОБ И УСТРОЙСТВО ДЕМОДУЛЯЦИИ СИГНАЛОВ ГАЛИЛЕЯ С ПЕРЕМЕННОЙ БИНАРНОЙ СМЕЩЕННОЙ НЕСУЩЕЙ (ALTBOC) | 2004 |
|
RU2349049C2 |
| ОСЛАБЛЕНИЕ ФАЗОВОЙ МНОГОЛУЧЕВОСТИ | 2005 |
|
RU2407025C2 |
| РАДИОПРИЕМНИК ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА СИГНАЛА | 2016 |
|
RU2669700C1 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ НАВИГАЦИОННОЙ СИСТЕМЫ С ПОНИЖЕННОЙ ВОСПРИИМЧИВОСТЬЮ К НЕПРЕДНАМЕРЕННЫМ И ПРЕДНАМЕРЕННЫМ ПОМЕХАМ | 2006 |
|
RU2419804C2 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| СПОСОБ И СИСТЕМА ДЛЯ АУТЕНТИФИКАЦИИ РАДИОНАВИГАЦИИ | 2018 |
|
RU2720881C1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2000 |
|
RU2178894C1 |
Изобретение относится к технике связи и может использоваться в системах спутниковой связи. Технический результат состоит в обеспечении системы атмосферного мониторинга и измерении на основании обработки радионавигационных сигналов глобальной навигационной спутниковой системы. Для этого система имеет архитектуру демодуляции разомкнутого цикла для извлечения фазовой и амплитудной информации из принятых спутниковых сигналов и способ обработки сигнала, который обеспечивает статистические характеристики относительно амплитудных и фазовых изменений, вызываемых атмосферой. 6 н. и 26 з.п. ф-лы, 11 ил.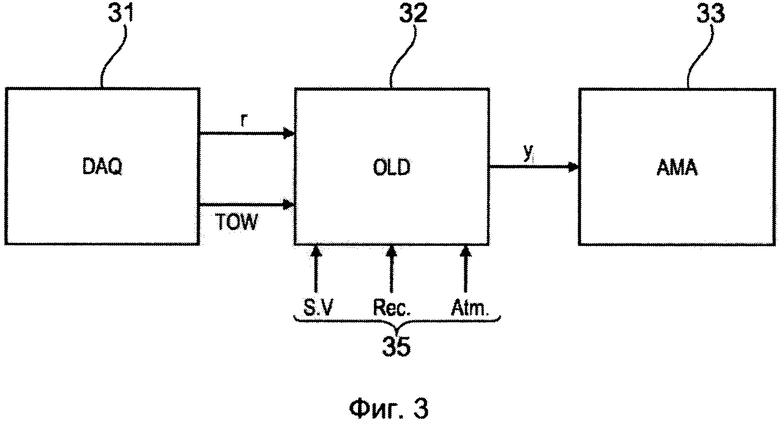
1. Система измерения для генерирования измерений ионосферной фазовой сцинтилляции на основании по меньшей мере одного сигнала Глобальной навигационной спутниковой системы (ГНСС) от находящегося на борту спутника передатчика ГНСС, причем система измерения в наземном приемнике содержит:
- модуль (31) сбора данных, модуль (32) демодулятора и модуль (33) алгоритмов атмосферного мониторинга, размещенные в конфигурации разомкнутого цикла,
причем модуль (31) сбора данных выполнен для приема сигнала ГНСС и включает в себя опорный синхрогенератор (418) и аналого-цифровой преобразователь (ADC) (416), соединенный с опорным синхрогенератором (418), причем ADC выполнен для генерирования нескольких IF отсчетов (r) промежуточной частоты при согласовании по времени с опорным синхрогенератором (418), причем каждый IF отсчет имеет ассоциированную временную метку (TOW), полученную от опорного синхрогенератора (418),
причем модуль (32) демодулятора выполнен для получения IF отсчетов (r) и ассоциированных временных меток (TOW), а также вспомогательных данных (35), относящихся к спутниковой системе, причем вспомогательные данные (35) включают в себя эфемеридную информацию (ATM), и выполнен для генерирования из них значений (Yi) коррелятора, и
причем модуль алгоритмов атмосферного мониторинга выполнен для получения значений (Yi) коррелятора и для генерирования из них измерений (σϕ) фазовой сцинтилляции, и
причем модуль (33) алгоритмов атмосферного мониторинга включает в себя алгоритм реконструкции фазового процесса, причем алгоритм реконструкции фазового процесса содержит:
- устранение поворота текущих значений (Yi) коррелятора в результате предшествующей оценки фазы,
- оценку остаточной фазы (Ф) с использованием дискриминатора, и
- вычисление текущей фазы (θ) как суммы предшествующей фазы и текущей остаточной фазы (Ф).
2. Система измерения для генерирования измерений ионосферной фазовой сцинтилляции на основании по меньшей мере одного сигнала Глобальной навигационной спутниковой системы (ГНСС) от находящегося на борту спутника передатчика ГНСС, причем система измерения в наземном приемнике содержит:
- модуль (31) сбора данных, модуль (32) демодулятора и модуль (33) алгоритмов атмосферного мониторинга, размещенные в конфигурации разомкнутого цикла,
причем модуль (31) сбора данных выполнен для приема сигнала ГНСС и включает в себя опорный синхрогенератор (418) и аналого-цифровой преобразователь (ADC) (416), соединенный с опорным синхрогенератором (418), причем ADC выполнен для генерирования нескольких IF отсчетов (r) промежуточной частоты при согласовании по времени с опорным синхрогенератором (418), причем каждый IF отсчет имеет ассоциированную временную метку (TOW), полученную от опорного синхрогенератора (418),
причем модуль (32) демодулятора выполнен для получения IF отсчетов (r) и ассоциированных временных меток (TOW), а также вспомогательных данных (35), относящихся к спутниковой системе, причем вспомогательные данные (35) включают в себя эфемеридную информацию (ATM), и выполнен для генерирования из них значений (Yi) коррелятора, и
причем модуль алгоритмов атмосферного мониторинга выполнен для получения значений (Yi) коррелятора и для генерирования из них измерений (σϕ) фазовой сцинтилляции, и
причем модуль (33) алгоритма атмосферного мониторинга включает в себя алгоритм процесса разности фаз, причем алгоритм процесса разности фаз является применяемым для реконструкции технологических значений Δ [n] разности фаз с использованием


причем каждое технологическое значение Δ [n] разности фаз является разностью фаз для двух смежных значений коррелятора, и
причем σϕ вычисляется по технологическим значениям Δ [n] разности фаз с помощью применяемого к ним фильтра, задаваемого посредством

3. Система по п. 1 или п. 2, причем модуль (31) сбора данных выполнен для выпуска каждого IF отсчета (r) в виде помеченного IF отсчета (r), причем каждый помеченный IF отсчет (r) содержит IF отсчет (r), помеченный соответствующей временной меткой (TOW).
4. Система по п. 1 или п. 2, причем модуль (32) демодулятора выполнен для получения помеченных IF отсчетов (r), причем каждое сгенерированное модулем (32) демодулятора значение (Yi) коррелятора ассоциировано с соответствующей временной меткой (TOW).
5. Система по п. 1 или п. 2, причем модуль (31) сбора данных содержит модуль (420) создания временных меток, выполненный для выпуска временных меток (TOW) синхронно с соответствующими IF отсчетами (r).
6. Система по п. 1 или п. 2, причем модуль (31) сбора данных содержит модуль (420) создания временных меток, соединенный с опорным синхрогенератором (418), причем модуль (420) создания временных меток выполнен для эксплуатации в качестве локального счетчика, представляющего местное время, и причем значение локального счетчика увеличивается при генерировании каждого IF отсчета (r).
7. Система по п. 1 или п. 2, причем модуль (31) сбора данных содержит понижающий преобразователь (410), выполненный для генерирования из радионавигационных сигналов аналоговых IF сигналов, причем понижающий преобразователь (410) функционирует на основе преобразовательного сигнала, полученного из выхода опорного синхрогенератора (418).
8. Система по п. 7, причем модуль (31) сбора данных содержит PLL (424), соединенный для получения выхода опорного синхрогенератора (418), причем PLL (424) приводит в действие VCO (426), предоставляющий преобразовательный сигнал к понижающему преобразователю (410).
9. Система по п. 1 или п. 2, причем опорный синхрогенератор (418) имеет степень синхронизации с временным интервалом радионавигационного сигнала менее одной десятой периода микросхемы кода измерения дальности радионавигационного сигнала.
10. Система по п. 1 или п. 2, причем опорный синхрогенератор (418) имеет степень синхронизации с временным интервалом радионавигационного сигнала такой величины, что он может использоваться для продвижения оценки времени для генерирования временных меток с точностью около 1 наносекунды.
11. Система по п. 1 или п. 2, причем опорный синхрогенератор (418) выполнен для продвижения вперед во времени от начальной точки синхронизации, соответствующей начальной временной метке.
12. Система по п. 1 или п. 2, причем опорный синхрогенератор (418) содержит идеально смоделированный опорный синхрогенератор, причем временные метки получают из сигналов времени, продвигающихся от точки синхронизации сигнала в прошлом, с использованием заданного периода дискретизации.
13. Система по п. 1 или п. 2, причем опорный синхрогенератор (418) содержит упорядоченный осциллятор, причем упорядоченный осциллятор включает в себя внутренний осциллятор и выполнен для получения упорядочивающего синхросигнала от внешнего стандарта частоты.
14. Система по п. 13, выполненная с возможностью функционирования в фазе инициирования и в фазе сбора данных, причем опорный синхрогенератор (418) выполнен с возможностью функционирования таким образом, что упорядочивание посредством упорядоченного осциллятора является активным во время фазы инициирования и деактивированным во время фазы сбора данных.
15. Система по п. 14, причем внешний стандарт частоты предоставлен одним из числа сигнала ГНСС и сигнала GPS упорядоченного осциллятора (GPSDO).
16. Система по п. 1 или п. 2, причем опорный синхрогенератор (418) содержит опорный синхрогенератор свободного хода, на котором выполняется динамическое моделирование его неизвестных параметров с помощью алгоритма оценки опорного синхрогенератора.
17. Система по п. 16, причем опорный синхрогенератор (418) выполнен с возможностью эксплуатации:
- для измерения оцененных параметров опорного синхрогенератора, и
- для точного продвижения временных меток от начальной точки синхронизации на основании оцененных параметров опорного синхрогенератора.
18. Система по п. 17, причем оцененные параметры опорного синхрогенератора измеряются по радионавигационным сигналам от первого комплекта находящихся на борту спутника передатчиков, и причем радионавигационный сигнал или сигналы, полученные модулем (31) сбора данных, происходят от одного или нескольких находящихся на борту спутника передатчиков второго комплекта находящихся на борту спутника передатчиков, причем первый комплект и второй комплект не имеют общих находящихся на борту спутника передатчиков.
19. Система по п. 1 или п. 2, причем вспомогательные данные (35) включают в себя соотнесенный с приемником параметр (Rec.), причем соотнесенный с приемником параметр представляет кусочно-непрерывную траекторию антенны (402) приемника в землецентричной, неподвижной относительно земли системе координат.
20. Система по п. 1 или п. 2, причем вспомогательные данные (35) включают в себя орбитальные параметры (S.V.) спутника, на котором смонтирован передатчик.
21. Система по п. 20, причем орбитальные параметры (S.V.) содержат радиовещательные эфемериды.
22. Система по п. 21, причем радиовещательные эфемериды содержат ГНСС эфемериды или точные эфемериды.
23. Система по п. 1 или п. 2, причем модуль (32) демодулятора включает в себя модель (504) пользовательского приемника для получения временной метки (TOW) и соотнесенного с приемником параметра (Rec.), а также для вывода соотнесенной с приемником временной задержки (δtRX).
24. Система по п. 1 или п. 2, причем модуль демодулятора включает в себя модель (506) космического аппарата, причем модель космического выполнена для получения временной метки (TOW) и орбитальных параметров (S.V.), а также для генерирования соотнесенной с космическим аппаратом временной задержки (δtSV).
25. Система по п. 24, причем модуль (32) демодулятора включает в себя модель (504) пользовательского приемника для получения временной метки (TOW) и соотнесенного с приемником параметра (Rec.), а также для вывода соотнесенной с приемником временной задержки (δtRX), причем модуль (32) демодулятора включает в себя атмосферную модель (508), причем атмосферная модель выполнена для получения временной метки (TOW), соотнесенной с приемником временной задержки (δtRX), соотнесенной с космическим аппаратом временной задержки (δtSV) и эфемеридной информации (Atm.), а также для вывода соотнесенной с атмосферой временной разности (δtA).
26. Система по п. 24, причем модуль (32) демодулятора включает в себя модель (504) пользовательского приемника для получения временной метки (TOW) и соотнесенного с приемником параметра (Rec.), а также для вывода соотнесенной с приемником временной задержки (δtRX), причем модуль (32) демодулятора выполнен для генерирования первой суммы (512), содержащей сумму соотнесенной с приемником временной разности (δtRX) и соотнесенной с космическим аппаратом временной разности (δtSV), а также для генерирования второй суммы, содержащей сумму первой суммы и соотнесенной с атмосферой временной разности (δtA), с целью генерирования соотнесенной с сигналом временной задержки (tSIG).
27. Система по п. 26, причем модуль демодулятора, кроме того, включает в себя МСО (оператор управляющего воздействия) кода и несущей частоты, служащий для получения задержки (tSIG) сигнала, а также для генерирования оценки ( ) для ввода в DMF (102).
) для ввода в DMF (102).
28. Система по п. 2, причем σϕ получают из σϕ2 с помощью функции 
29. Способ измерения для генерирования измерений ионосферной фазовой сцинтилляции на основании по меньшей мере одного сигнала Глобальной навигационной спутниковой системы (ГНСС) от находящегося на борту спутника передатчика ГНСС, причем способ содержит:
- предоставление модуля (31) сбора данных, модуля (32) демодулятора и модуля (33) алгоритмов атмосферного мониторинга, размещенных в конфигурации разомкнутого цикла в наземном приемнике, причем модуль (31) сбора данных включает в себя опорный синхрогенератор (418) и аналого-цифровой преобразователь (ADC) (416), соединенный с опорным синхрогенератором (418),
- получение, с использованием модуля (31) сбора данных, сигнала ГНСС, причем ADC выполнен для генерирования из него нескольких IF отсчетов (r) промежуточной частоты при согласовании по времени с опорным синхрогенератором (418), причем каждый IF отсчет имеет ассоциированную временную метку (TOW), полученную от опорного синхрогенератора (418),
- получение, с использованием модуля демодулятора (32), IF отсчетов (r), ассоциированных временных меток (TOW) и вспомогательных данных (35), относящихся к спутниковой системе, причем вспомогательные данные (35) включают в себя эфемеридную информацию (ATM), и генерирование из них значений (Yi) коррелятора, и
- получение, с использованием модуля (33) алгоритмов атмосферного мониторинга, значений (Yi) коррелятора, а также генерирование из них измерений (σϕ) фазовой сцинтилляции, и
причем модуль (33) алгоритмов атмосферного мониторинга включает в себя алгоритм реконструкции фазового процесса, причем алгоритм реконструкции фазового процесса содержит:
- устранение поворота текущих значений (Yi) коррелятора в результате предшествующей оценки фазы,
- оценку остаточной фазы (Ф) с использованием дискриминатора, и - вычисление текущей фазы (θ) как суммы предшествующей фазы и текущей остаточной фазы (Ф).
30. Способ измерения для генерирования измерений ионосферной фазовой сцинтилляции на основании по меньшей мере одного сигнала Глобальной навигационной спутниковой системы (ГНСС) от находящегося на борту спутника передатчика ГНСС, причем способ содержит:
- предоставление модуля (31) сбора данных, модуля (32) демодулятора и модуля (33) алгоритмов атмосферного мониторинга, размещенных в конфигурации разомкнутого цикла в наземном приемнике, причем модуль (31) сбора данных включает в себя опорный синхрогенератор (418) и аналого-цифровой преобразователь (ADC) (416), соединенный с опорным синхрогенератором (418),
- получение, с использованием модуля (31) сбора данных, сигнала ГНСС, причем ADC выполнен для генерирования из него нескольких IF отсчетов (r) промежуточной частоты при согласовании по времени с опорным синхрогенератором (418), причем каждый IF отсчет имеет ассоциированную временную метку (TOW), полученную от опорного синхрогенератора (418),
- получение, с использованием модуля демодулятора (32), IF отсчетов (r), ассоциированных временных меток (TOW) и вспомогательных данных (35), относящихся к спутниковой системе, причем вспомогательные данные (35) включают в себя эфемеридную информацию (ATM), и генерирование из них значений (Yi) коррелятора, и
- получение, с использованием модуля (33) алгоритмов атмосферного мониторинга, значений (Yi) коррелятора, а также генерирование из них них измерений (σϕ) фазовой сцинтилляции, и
причем модуль (33) алгоритма атмосферного мониторинга включает в себя алгоритм процесса разности фаз, причем алгоритм процесса разности фаз является применяемым для реконструкции технологических значений Δ [n] разности фаз с использованием 


причем каждое технологическое значение Δ [n] разности фаз является разностью фаз для двух смежных значений коррелятора, и
причем σϕ вычисляют по технологическим значениям Δ [n] разности фаз с помощью применяемого к ним фильтра, задаваемого посредством

31. Носитель данных, имеющий однократно записанные, перезаписанные или сохраненные на нем данные, задающие или поддающиеся преобразованию в команды для выполнения посредством вычислительных схем, которые соответствуют этапам способа по п. 29 или 30.
32. Серверный компьютер, содержащий коммуникационное устройство и запоминающее устройство, и выполненный для передачи по требованию или иным образом данных, задающих или поддающихся преобразованию в команды для выполнения посредством вычислительных схем, которые соответствуют этапам способа по п. 29 или п. 30.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЭПИЦЕНТРАЛЬНОЙ ЗОНЫ ИСТОЧНИКА И СКОРОСТИ РАСПРОСТРАНЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ИОНОСФЕРНЫХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2560525C1 |
| УСТРОЙСТВО ПЕЛЕНГАЦИИ ИССКУСТВЕННЫХ ИОНОСФЕРНЫХ ОБРАЗОВАНИЙ | 2013 |
|
RU2523912C1 |
| US 5629708 A, 13.05.1997 | |||
| US 4894662 A, 16.01.1990. | |||

