Изобретение относится к области транспортного машиностроения, а именно к самоходным колесным машинам повышенной маневренности.
Существует транспортное средство суперманевренности и суперпроходимости (RU 2512055 C2. 17.07.2012), состоящее из двигателя, кабины, рамы, ведущих мостов и движителей. Каждый из движителей состоит из четырех колес с приводом на карданных подвесах, размещенных на концах радиальных кронштейнов, которые приводятся в движение при помощи планетарной передачи.
Недостатком данной конструкции является ее чрезмерная сложность. Данный недостаток частично устранен в транспортном роботе (RU 219584 U1. 02.06.2023), принятом за прототип и содержащим основание, опирающееся на совокупность самоустанавливающихся ведомых, а также ведущих колес, снабженных автономным приводом, основание разделено на две части, связанные между собой посредством горизонтального шарнира, первая из которых опирается только на ведомые колеса, а вторая на ведущие.
Недостатками данного транспортного робота являются ограничение мобильности и сложность конструкции из-за наличия двух автономных электроприводов, а также сложность системы управления при реализации данной схемы с приводом от ДВС для расширения возможностей по применению.
Целью предлагаемого изобретения является увеличение мобильности и упрощение конструкции системы управления транспортного средства.
Указанная цель достигается тем, что колесное транспортное средство содержит несущую раму с моторно-трансмиссионным блоком, включающим в себя двигатель внутреннего сгорания, автоматическое сцепление и вариатор, а также кинематически связанный с вариатором реверс-редуктор со встроенным дифференциалом, переднюю опорную тележку с ведомыми самоустанавливающимися колесами, связанную с несущей рамой посредством горизонтального шарнира и кресло водителя. Новизной предлагаемого транспортного средства является то, что:
- полуоси дифференциала кинематически связаны одновременно с ведущими колесами и с фрикционными роликами, замыкающего дифференциал управляющего вариатора;
- управляющий вариатор выполнен в виде двух фрикционных роликов, кинематически связанных между собой регулирующим катком в виде эллипсоида вращения с возможностью его наклона в вертикальной плоскости относительно горизонтальной оси при помощи рычага управления поворотом. При этом рычаг управления поворотом объединен с кнопкой управления дроссельной заслонкой, рукояткой тормоза, переключателями света и указателей поворота.
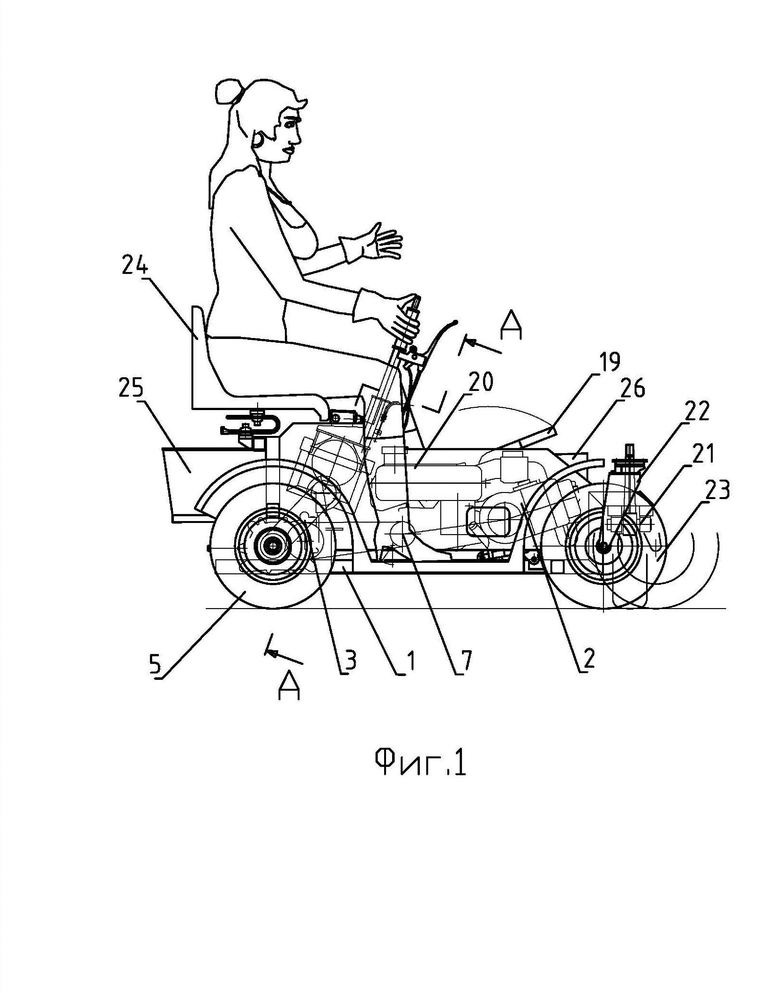
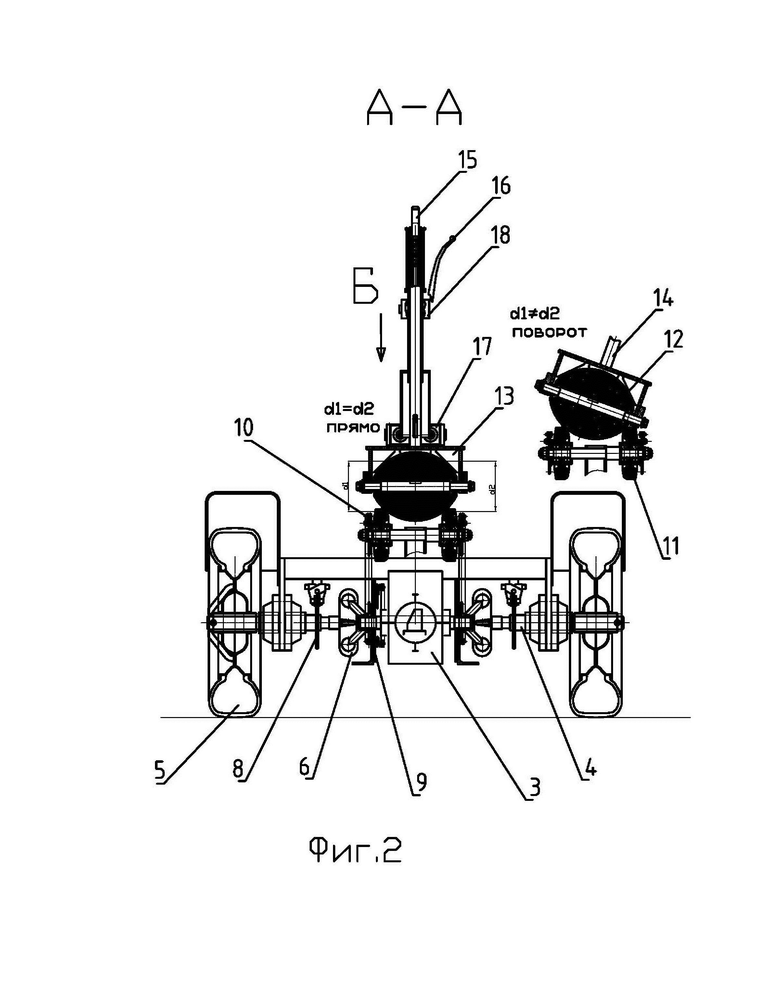
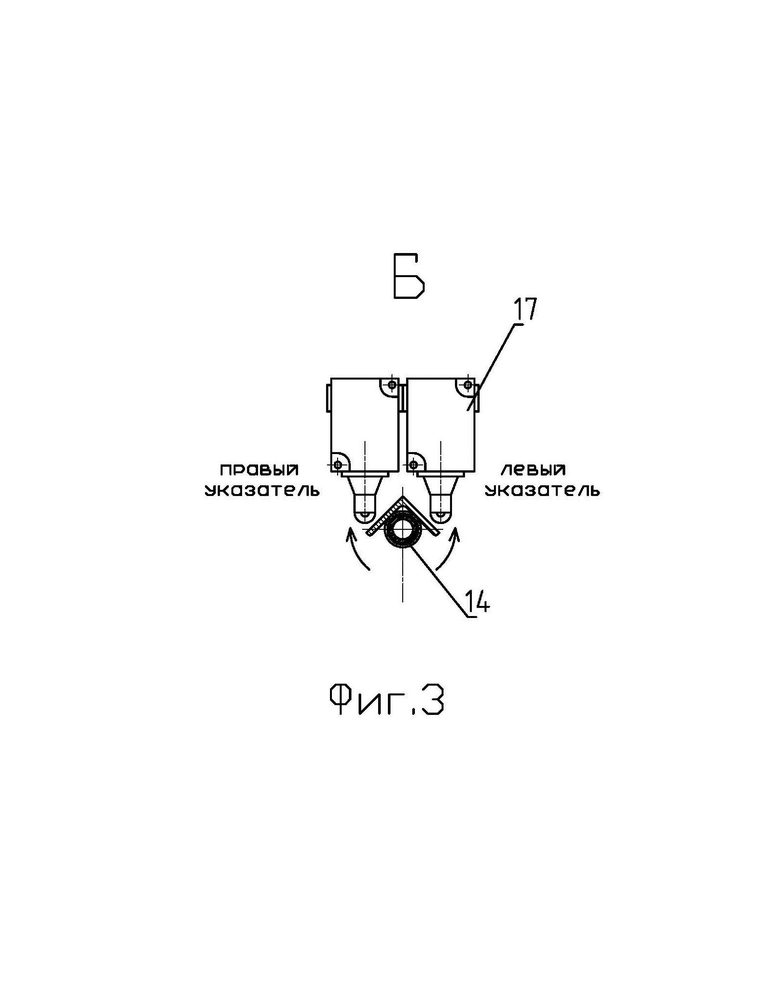
Устройство колесного транспортного средства поясняется чертежами, где на фиг. 1 - общий вид, вид сбоку. Фиг. 2 - разрез по рычагу управления поворотом, вариатору и заднему ведущему мосту. Фиг. 3 - вид сверху на рычаг управления.
Колесное транспортное средство содержит несущую раму 1 со смонтированным на ней моторно-трансмиссионным блоком, состоящим из двигателя 2 от мотоскутера, включающего в себя автоматическое сцепление и вариатор, реверс редуктора главной передачи 3 от мотороллера «Муравей» и полуосей 4 с ведущими колесами 5. Полуоси 4 кинематически связаны с полуосями дифференциала реверс-редуктора 3 через упругие соединительные муфты 6. На выходном валу двигателя жестко закреплена ведущая звездочка 7 со встроенным тормозным барабаном рабочего тормоза. На полуосях ведущих колес смонтированы дисковые тормозные механизмы 8 вспомогательного стояночного тормоза. В свою очередь на полуосях дифференциала реверс-редуктора главной передачи 3 смонтированы дополнительные звездочки 9, кинематически связанные посредством цепных передач 10 с фрикционными роликами 11.
Передаточные числа цепных передач и диаметры фрикционных роликов правой и левой стороны одинаковы.
Правый и левый фрикционные ролики 11 кинематически связаны с качающимся регулирующим катком 12 эллипсоидной формы. Таким образом, конструктивно выполнен регулирующий фрикционный вариатор, замыкающий дифференциал главной передачи. Каток 12 смонтирован в качающейся обойме 13, выполненной как единое целое с рычагом 14 управления дифференциалом ведущего моста и, как следствие, поворотом транспортного средства.
На рычаге 14 смонтирована кнопка 15 управления «газом», рукоятка 16 рабочего тормоза, выключатели 17, указателей поворота и переключатель света 18.
Кроме основных органов управления имеется рукоятка 19 запуска двигателя, топливный бак 20, а также рычаг включения реверса и стояночного тормоза (не показаны).
Передним концом несущая рама 1 посредством горизонтального шарнира 21 кинематически связана с передней опорной тележкой 22, содержащей ведомые самоустанавливающиеся колеса 23.
Транспортное средство оснащено подрессоренным сиденьем 24, багажником 25, подножками, крыльями и капотом 26.
Совокупность всех вышеперечисленных технических решений позволяет реализовать сверхманевренные качества колесного транспортного средства с управлением одной рукой.
При этом благодаря замыканию полуосей дифференциала ведущего моста на управляющий вариатор исключается неконтролируемая пробуксовка ведущих колес, что повышает проходимость.
Данное колесное транспортное средство благодаря управлению одной рукой может быть полезно инвалидам, а также может использоваться как спортивный снаряд для дрифта в зависимости от скорости движения.
Работает колесное транспортное средство следующим образом.
После запуска и прогрева двигателя водитель занимает свое место в кресле. При этом рычаг управления находится в вертикальном положении. Далее отпускается вспомогательный стояночный тормоз и нажимается кнопка «газа» на рычаге управления поворотом. При этом срабатывает автоматическое сцепление и транспортное средство начинает двигаться прямо. При увеличении оборотов двигателя автоматически изменяется передаточное отношение вариатора двигателя и скорость увеличивается. Для осуществления поворота водитель снижает скорость, отпуская кнопку «газа» и отклоняет рычаг вбок в сторону поворота.
Вследствие особенности конструкции управляющего вариатора при вертикальном положении рычага d1=d2 (см. фиг. 2) и передаточное отношение управления дифференциалом главной передачи одинаково. При этом правое и левое ведущие колеса принудительно вращаются с одинаковой скоростью.
При отклонении рычага вправо или влево диаметры контакта управляющего катка с фрикционными роликами d1 и d2 различаются тем больше, чем больше угол отклонения рычага. При этом передаточные отношения управления дифференциалом главной передачи справа и слева отличаются, и колеса принудительно вращаются с разными скоростями, осуществляя поворот транспортного средства.
Для остановки снижаются обороты двигателя до холостых. При этом двигатель и трансмиссия автоматически разобщаются, после чего водитель нажимает на рукоятку тормоза, расположенную на рычаге управления поворотом, и затормаживается рабочий тормоз на ведущей звездочке двигателя. При этом происходит остановка без изменения траектории движения транспортного средства.
Для включения указателей поворота водитель кистью руки поворачивает вправо или влево рукоятку управления, и флажок (см. фиг. 3) включает соответственно правый или левый выключатель.
Для включения освещения и подачи звукового сигнала служит переключатель мотоциклетного типа, расположенный на основном рычаге управления.
Наличие возможности управления данным транспортным средством всего одной рукой в сочетании со сверхманевренностью, делает его незаменимым для автономного передвижения инвалидов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесный мини-трактор | 2024 |
|
RU2829516C1 |
| Транспортное средство | 1979 |
|
SU829457A1 |
| Система автоматического управления дифференциалом ведущего моста тягового колесного средства | 1983 |
|
SU1079484A1 |
| ПЛАВАТЕЛЬНОЕ ОБОРУДОВАНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2390458C1 |
| Трансмиссия гусеничного транспортного средства | 1990 |
|
SU1766759A1 |
| Трансмиссия секционной колесной машины, преимущественно трактора с шарнирно-сочлененной рамой | 2022 |
|
RU2796857C1 |
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2010 |
|
RU2442715C1 |
| Ведущий мост транспортного средства | 1975 |
|
SU582109A1 |
| КОЛЕСНАЯ МОДИФИКАЦИЯ ГУСЕНИЧНОГО ТРАКТОРА | 2010 |
|
RU2432293C1 |
| Транспортное средство | 1980 |
|
SU943022A2 |
Изобретение относится к области транспортного машиностроения. Колесное транспортное средство содержит несущую раму с моторно-трансмиссионным блоком, двигатель внутреннего сгорания, сцепление, вариатор, реверс-редуктор со встроенным дифференциалом, ведущие колеса, полуоси дифференциала, полуоси ведущих колес, переднюю опорную тележку с ведомыми самоустанавливающимися колесами, связанную с несущей рамой посредством горизонтального шарнира, и кресло водителя. Вариатор выполнен в виде двух фрикционных роликов, кинематически связанных между собой регулирующим катком в виде эллипсоида вращения с возможностью его наклона в вертикальной плоскости относительно горизонтальной оси при помощи рычага управления поворотом. Полуоси дифференциала кинематически связаны одновременно с полуосями ведущих колес и с фрикционными роликами замыкающего дифференциал вариатора. Рычаг управления поворотом объединен с кнопкой управления дроссельной заслонкой, рукояткой тормоза, переключателями света и указателей поворота. Достигается увеличение мобильности и упрощение конструкции системы управления транспортного средства. 1 з.п. ф-лы, 3 ил.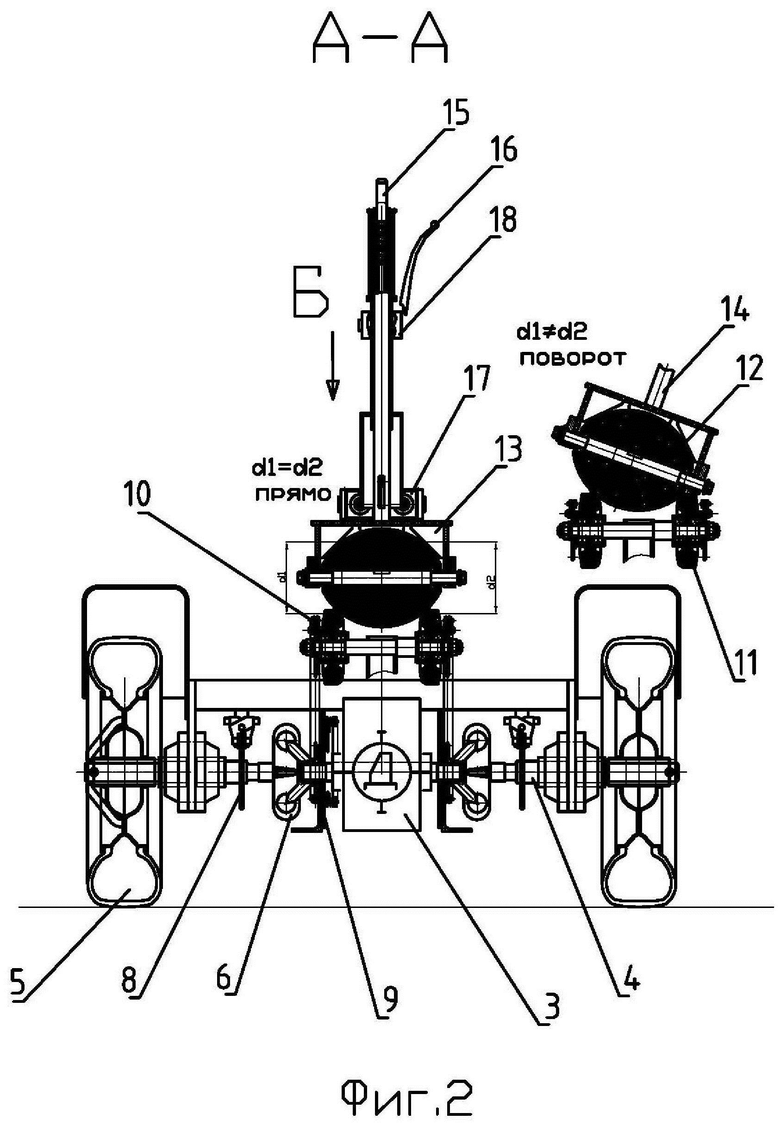
1. Колесное транспортное средство, содержащее несущую раму с моторно-трансмиссионным блоком, включающим в себя двигатель внутреннего сгорания, автоматическое сцепление и вариатор, а также кинетически связанный с вариатором реверс-редуктор со встроенным дифференциалом и ведущие колеса, полуоси дифференциала, полуоси ведущих колес, переднюю опорную тележку с ведомыми самоустанавливающимися колесами, связанную с несущей рамой посредством горизонтального шарнира, и кресло водителя, при этом вариатор выполнен в виде двух фрикционных роликов, кинематически связанных между собой регулирующим катком в виде эллипсоида вращения с возможностью его наклона в вертикальной плоскости относительно горизонтальной оси при помощи рычага управления поворотом, а полуоси дифференциала кинематически связаны одновременно с полуосями ведущих колес и с фрикционными роликами замыкающего дифференциал вариатора.
2. Транспортное средство по п. 1, отличающееся тем, что рычаг управления поворотом объединен с кнопкой управления дроссельной заслонкой, рукояткой тормоза, переключателями света и указателей поворота.
| ВАРИАТОРНЫЙ МЕХАНИЗМ ПОВОРОТА САМОХОДНЫХ МАШИН | 2003 |
|
RU2240246C1 |
| RU 2008110927 A, 27.09.2009 | |||
| US 4977970 A1, 18.12.1990 | |||
| US 3871461 A1, 18.03.1975 | |||
| US 6126564 A1, 03.10.2000. | |||

