Изобретение относится к области навигационного приборостроения с использованием магнитного поля Земли и предназначено для построения приборов измерения магнитного курса и углов наклона подвижных объектов.
Известен способ [1] измерения магнитного курса подвижного объекта, использующий информацию с установленных неподвижно относительно связанных осей подвижного объекта трехкомпонентного магнитометра и трех акселерометров, измерительные оси которых параллельны осям подвижного объекта. В указанном способе вычисление одного из углов наклона подвижного объекта, необходимого для определения магнитного курса, производится из равенства априорно известной горизонтальной или вертикальной составляющей вектора напряженности магнитного поля Земли с его вычисленным значением по измеренной датчиками информации. Вычисление другого угла наклона производится по измеренной датчиками информации и определенному первому углу наклона.
Недостатком известного способа является, как показывает анализ, необходимость уточнения в предложенном алгоритме знака квадратного корня при определении первого угла наклона (см. [1], величину V в уравнении 2), которая возникает при некоторых режимах движения подвижного объекта.
Техническим результатом предлагаемого решения является создание способа измерения магнитного курса подвижного объекта посредством жесткозакрепленных на подвижном объекте датчиков первичной информации, позволяющего решать поставленную задачу в любых режимах движения подвижного объекта.
Указанный технический результат достигается тем, что вычисление углов наклона производится решением системы трех уравнений, два из которых представляют проекции вектора напряженности магнитного поля Земли и вектора линейного ускорения на вертикаль места, а третье уравнение есть уравнение масштаба для направляющих косинусов, определяющих ориентацию вертикали места относительно связанной системы координат подвижного объекта.
Для однозначного определения фактических углов наклона подвижного объекта определение истинного решения производится из условия равенства скорости изменения направляющего косинуса, полученного при решении системы уравнений, со скоростью изменения этого направляющего косинуса, вычисленной на основании информации о, как минимум, двух, предварительно измеренных, проекциях вектора угловой скорости подвижного объекта и двух направляющих косинусов.
Такой способ может быть осуществлен устройством, содержащим блок трехкомпонентного магнитометра, блок трехкомпонентного акселерометра, жестко закрепленные на подвижном объекте, блок вычисления углов наклона и блок вычисления угла магнитного курса, которое дополнительно снабжено блоком измерения проекций абсолютной угловой скорости и блоком вычисления направляющих косинусов. Выход блока трехкомпонентного магнитометра соединен с первыми входами блока вычисления угла магнитного курса и блока вычисления направляющих косинусов. Второй вход блока вычисления направляющих косинусов соединен с выходом блока трехкомпонентного акселерометра, а выход блока вычисления направляющих косинусов соединен с первым входом блока вычисления углов наклона, второй вход которого соединен с выходом блока измерения проекций абсолютной угловой скорости. Выход блока вычисления углов наклона соединен со вторым входом блока вычисления угла магнитного курса. С выходов блока вычисления угла магнитного курса и блока вычисления углов наклона соответственно информация по магнитному курсу и углам крена и тангажа (дифферента) подается потребителю.
Предлагаемый способ можно пояснить следующим образом. Проекции векторов магнитного поля Земли и линейного ускорения подвижного объекта, выраженные через показания магнитометра и акселерометров, и составляющие систему исходных уравнений, можно представить в виде:

Здесь ti - показания i-ого магнитометра, i=1, 2, 3;
аi - показания i-ого акселерометра, i=1, 2, 3;
Z - значение вертикальной составляющей напряженности магнитного поля Земли;
G - значение вертикальной составляющей линейного ускорения подвижного объекта;
хi - направляющие косинусы, определяющие ориентацию вертикали места относительно связанной системы координат подвижного объекта. При этом систему (1) необходимо дополнить уравнением масштаба [2]:
Связь между направляющими косинусами и углами наклона подвижного объекта в данном случае определятся следующими соотношениями:

где γ - угол крена;
ϑ - угол тангажа.
Решение системы уравнений

имеет в общем случае два решения:

по меньшей мере одно из которых является истинным. Для определения истинного решения системы уравнений достаточно воспользоваться одним из следующих соотношений, справедливых для направляющих косинусов [2],

где ωi-скорость изменения направляющего косинуса, i=1, 2, 3.
Т.е. необходимо определить скорость изменения одного из направляющих косинусов, например  и вычислить соотношения
и вычислить соотношения

В качестве истинного решения принимается то, для которого будет иметь место равенство

Очевидно, что для реализации этого алгоритма блок датчиков первичной информации необходимо дополнить двумя датчиками угловой скорости.
Предлагаемое техническое решение иллюстрируется блок-схемой устройства измерения магнитного курса на чертеже,
Предлагаемый способ осуществляется следующим образом. Блок 1 трехкомпонентного магнитометра и блок 2 трехкомпонентного акселерометра жестко закреплены на подвижном объекте, и их измерительные оси параллельны связанным осям подвижного объекта. Блок 3 вычисления направляющих косинусов производит вычисление двух групп направляющих косинусов Х' и Х'', определяющих ориентацию подвижного объекта на основании решения системы уравнений (4).
Блок 4 вычисления углов наклона осуществляет выбор истинного решения Xi на основании проверки выполнения условия (8) и вычисление углов наклона в соответствии с формулами (3) по значениям выбранной группы направляющих косинусов Хi. Для этого один из входов блока 4 вычисления углов наклона соединяется с выходом блока 3 вычисления направляющих косинусов, а другой его вход соединяется с выходом блока 5 измерения проекций абсолютной угловой скорости. Блок 6 вычисления магнитного курса вычисляет магнитный курс Ψ подвижного объекта по общеизвестным соотношениям.
Библиография
1. Патент на изобретение RU № 2130588 «Способ измерения магнитного курса подвижного объекта». [G 01 С 21/08, 21/12, 17/38].
2. Айзерман М.А. Классическая механика. - М.: "Наука", 1974, с.368.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения магнитного курса подвижного объекта | 2024 |
|
RU2831224C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2004 |
|
RU2257546C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА | 2017 |
|
RU2671937C1 |
| Электронный компас для подвижного объекта | 2024 |
|
RU2829808C1 |
| СПОСОБ АВТОНОМНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2017 |
|
RU2653967C1 |
| Способ автономной ориентации подвижного объекта с помощью инерциального измерительного модуля | 2019 |
|
RU2738342C1 |
Изобретение может быть использовано в навигационном приборостроении и предназначено для измерения магнитного курса и углов наклона подвижных объектов. Для измерения магнитного курса используется информация о векторах магнитного поля Земли, линейного ускорения и как минимум двух проекциях вектора угловой скорости. Вычисление углов наклона, необходимых для определения магнитного курса, производится решением системы трех уравнений, два из которых представляют проекции вектора напряженности магнитного поля Земли и вектора линейного ускорения на вертикаль места, а третье уравнение есть уравнение масштаба для направляющих косинусов, определяющих ориентацию вертикали места относительно связанной системы координат подвижного объекта. Для однозначного определения фактических углов наклона подвижного объекта определение истинного решения производится из условия равенства скорости изменения направляющего косинуса, полученного при решении системы уравнений, со скоростью изменения этого направляющего косинуса, вычисленной на основании информации о двух проекциях вектора угловой скорости подвижного объекта и двух направляющих косинусов. Устройство содержит блок трехкомпонентного магнитометра, блок трехкомпонентного акселерометра, блоки измерения проекций абсолютной угловой скорости, вычисления направляющих косинусов, вычисления углов наклона и вычисления угла магнитного курса. Техническим результатом является возможность измерений в любых режимах движения подвижного объекта. 2 с.п. ф-лы, 1 ил.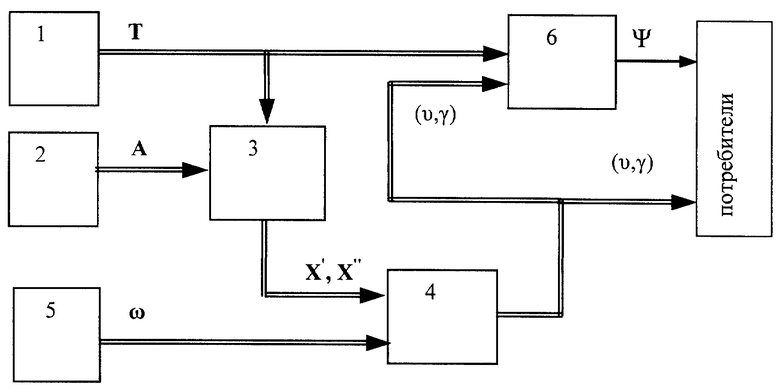
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА | 1998 |
|
RU2130588C1 |
| СИСТЕМА КУРСА И ВЕРТИКАЛИ И СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО КУРСА | 1994 |
|
RU2085850C1 |
| СПОСОБ КОНТРОЛЯ МАРШРУТОВ СЛЕДОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2194250C1 |
| ПОЛУПРОВОДНИКОВАЯ СТРУКТУРА И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2021 |
|
RU2808084C1 |
| US 4539760 A, 10.09.1985. | |||

