Изобретение относится к авиационной технике, и может быть использовано в способе подъёма и маневрированием мягким крылом в конструкциях парашютов, кайтов и летательных аппаратах (ЛА) с мягким крылом.
В техническом решении по способу подъёма и маневрированием мягким крылом в воздухе, для удобства использования летательных аппаратов с мягким крылом, крыло в стартовое положение поднимается в воздух, натягивая стропы, и производится маневрирование крыла в полёте, вне зависимости от наличия набегающего внешнего воздушного потока (ветра).
Известен способ раскрытия мягкого крыла (купола) парашюта который раскрывается в рабочее положение с помощью набегающего воздуха при прыжке. Парашют – состоит из купола, строп, вытяжного парашюта и подвесной системы. Маневрирование парашютом осуществляется с помощью строп. Недостатком данного способа раскрытия парашюта – требуется давление воздуха для раскрытия купола создаваемое при свободном падении, что ограничивает высоту с которой используется парашют. (ru. Wikipedia. Orq Парашют Википедия. Аналог)
Известен способ поднятия в воздух надувного кайт – управляемого воздушного змея предназначенного для буксировки с помощью ветра. Кайт состоит из мягкого крыла с наполненным воздухом каркасом, системы строп и ручек управления. Запуск надувного кайта происходит следующим образом: на земле расправляются стропы, надувается воздухом каркас, крыло расправляется и под действием ветра поднимается в воздух. Недостатком такого старта является наличие постоянно дующего ветра. А так же не способность кайта удерживаться в воздухе при отсутствии ветра.( ru. Wikipedia. Orq. Кайт-Википедия. Аналог.)
Известен способ с устройство для раскрытия купола парашюта, содержащее два баллона первый баллон, который при наполнении водородом или гелием выполнен с возможностью подъёма и расправки купола парашюта, а второй баллон предназначенный для хранения водорода или гелия, и шланг с запорным устройством для наполнения первого баллона из второго. В данном парашюте купол при заполнении первого баллона расправляется и поднимается в стартовую позицию. Недостатком данного способа является низкое аэродинамическое качество, взрывоопасность водорода и высокая стоимость гелия. (Патент РФ2285638 Аналог.)
Наиболее близким, к заявленному изобретению относится способ подъёма с помощью подъёмной аэростатической силы газа легче воздуха, мягкого газонаполненного крыла по Патенту РФ2121943 «МЯГКОЕ ГАЗОНАПОЛНЯЕМОЕ КРЫЛО» Автор: Киселёв Валерий Семёнович. Крыло выполнено с полой газонепроницаемой оболочкой, разделённую на секции, снабжённое герметичными отсеками для лёгкого газа, оснащенное системой строп и подвесок, содержит ёмкость со сжатым газом и гибкий газопровод соединяющий ёмкость со всеми герметичными отсеками. Подъём крыла в стартовую позицию происходит при наполнении лёгким газом (водородом или гелием) герметичных отсеков крыла, что создаёт крылу подъёмную Архимедову силу и расправляет крыло для старта. Основным недостатком данного способа подъёма крыла является одноразовость заполнения герметичных отсеков крыла газом легче воздуха, при этом водород – взрывоопасен а гелий дорогой газ .Если использовать газ многократно то потребуются дополнительные перекачивающие насосы , что значительно усложняет конструкцию крыла и ограничивает функциональные возможности летательных аппаратов, конкретно – сборку и хранение крыла, например в малом объёме ранца или отсека летательного аппарата. Данное техническое решение, для рассматриваемого изобретения является прототипом.
Задача заявленного изобретения: *Реализовать способ подъёма крыла в стартовую позицию и маневрирование мягким крылом летательного аппарата, без применения подъёмной статической Архимедовой силы газа легче воздуха. *Реализовать способ подъём мягкого крыла летательного аппарата в стартовое положение вне зависимости от наличия внешнего воздушного потока (ветра). *Реализовать способ маневрирования мягкого крыла в воздухе регулируемыми по величине и направлению векторами тяги воздушных потоков, использующих воздушные движители крыла в качестве тяговых движителей при подъёме, зависании и горизонтальном полёте. *Реализовать сбор и хранение мягкого крыла летательного аппарата в малом объёме, например ранца или отсека для хранения в собранном виде.
Поставленная задача подъёма мягкого крыла летательного аппарата в стартовую позицию, без применения подъёмной статической Архимедовой силы газа легче воздуха достигается тем, что через одно или несколько отверстий в мягком крыле создаётся воздушный поток воздуха, перпендикулярный к земле и плоскости крыла. Для раскрытия мягкого крыла перед стартом в крыло, выполненное пневмокаркасным и воздухонепроницаемым, закачивается воздух под давлением, обеспечивая мягкому крылу соответствующую форму и относительную жёсткость. Воздух поступает в пневмокаркас через гибкий воздуховод, связанный, в зависимости от требуемой экономической целесообразности или скорости наполнения каркаса воздухом, через редуктор с баллоном со сжатым воздухом, или насосом прямого действия, или компрессором с ресивером. Сброс воздуха из пневмокаркаса мягкого крыла в атмосферу, при упаковке мягкого крыла, производится через сбросной клапан пневмокаркаса. Механическая связь мягкого крыла и перемещаемого объекта осуществляется стропами с системой подвеса, закреплёнными на перемещаемом объекте, например, ранце, корпусе летательного аппарата (фюзеляже), или корпусе транспортного средства. Создание воздушного потока, для подъёма в воздух мягкого крыла, через выполненное одно или несколько отверстий в мягком крыле, в каждом из отверстий с вектором тяги направленный вверх и перпендикулярного к земле, происходит при вращении ротора электродвигателя с воздушным винтом, закреплённым на валу ротора. Реализация способа маневрирования мягкого крыла в полёте, производится электродвигателями воздушных винтовых движителей при изменении скорость вращения и положения относительно плоскости крыла. Что позволяет создавать воздушные потоки через отверстия мягкого крыла с регулируемыми по величине и направлению векторами тяги, тем самым осуществлять маневрированием крыла в воздухе. В этом случае, воздушный винтовой движитель крыла является для летательного аппарата и тяговым воздушным движителем. Регулирование воздушных потоков через отверстия в крыле, производится изменением оборотов электродвигателя, осуществляемое электронным блок-регулятором оборотов электродвигателя, а изменение направления воздушных потоков осуществляется поворотами электродвигателя с воздушным винтом. Повороты электродвигателя, осуществляют установленные исполнительные механизмы с электроприводом, при включении, поворачивающие электродвигатели, плоскостью воздушных винтов от параллельного до перпендикулярного к плоскости мягкого крыла. Электродвигатель с воздушным винтом движителя, поворачивается на двух осях вращения, закреплённых параллельно продольной оси крыла на кольцевой раме, при включении электропривода поворота электродвигателя воздушного винтового движителя. Дополнительно, в плоскости крыла, поворот кольцевой рамы вместе с электродвигателем с воздушным винтом, производится при включении электропривода механизма поворота кольцевой рамы , установленным в отверстии крыла на кольцевой опоре, на которой закреплён электропривод поворота в плоскости мягкого крыла. Способ маневрирования мягкого крыла в воздухе, регулируемыми по величине и направлению векторами тяги воздушных потоков, применим для летательных аппаратов использующих воздушные движители крыла и в качестве тяговых движителей при подъёме, зависании и горизонтальном полёте. Данный способ маневрирования применим в конструкции воздушных змеев и устройств на их основе, тяговых кайтов, парашютов в форме крыла и летательных аппаратов на их основе. Электроснабжение электродвигателей и электроаппаратуры воздушно винтового движителя , производится по электрическим кабелям, соединяющих мягкое крыло с источником питания, расположенным ниже системы подвеса строп. Мягкое крыло, поднятое в воздух воздушным потоком, созданным воздушными винтами движителя, натягивает стропы, электрокабели, гибкий воздуховод и устанавливается в стартовое положение. При вращении воздушных винтов движителей, следует учитывать фактор крутящего момента создаваемым воздушным винтом, то есть крутящие моменты должны быть взаимно компенсированы. При нахождении мягкого крыла в воздухе, для снятия излишней нагрузки от воздушных винтовых движителей, кольцевая рама движителей непосредственно соединена стропами с системой подвеса. Запуск крыла в предстартовое положение производится следующим образом; крыло извлекается из ранца ( отсека хранения), открывается клапан источника сжатого воздуха, по гибкому воздуховоду, воздух под давлением поступает в пневмокаркас мягкого крыла. Мягкое крыло принимает рабочую форму, под действием давления воздуха в пневмокаркасе. Включаются винтовые воздушные движители . При включении движители, создают воздушный поток через отверстия в крыле перпендикулярно к земле и поднимают мягкое крыло в воздух натягивая стропы. Мягкое крыло занимает стартовое положение, при наборе высоты мягким крылом, воздушные винтовые движители, поворотом двигателей переводятся в режим горизонтальной тяги. В дальнейшем, в полете воздушные потоки, через отверстия и параллельно крылу, регулируются по величине и направлению блоком регулятора оборотов двигателя, электроприводами поворота воздушного винта от параллельного до перпендикулярного к плоскости крыла и электроприводом поворота кольцевой рамы в плоскости крыла, тем самым обеспечивается зависание и горизонтальный полёт. Приземление летательных аппаратов с мягким крылом производится при включении воздушных движителей крыла в режим вертикальной тяги и (или) с помощью строп управления. После приземления, открывается сбросной клапан пневмокаркаса крыла, воздух сбрасывается в атмосферу, крыло сдувается и помещается, в зависимости от конструкции летательного аппарата, вместе со стропами и остальными элементами крыла, в ранец, сумку или отсек хранения.
На листе 1 изображены: 1) Фиг.1 мягкое крыло с двумя воздушными винтовыми движителями создающие воздушный поток через отверстия в мягком крыле. Вид сверху. 2) Фиг. 2 воздушный винтовой движитель с механизмом поворота воздушного винта от параллельного до перпендикулярного к плоскости мягкого крыла. Вид сверху.
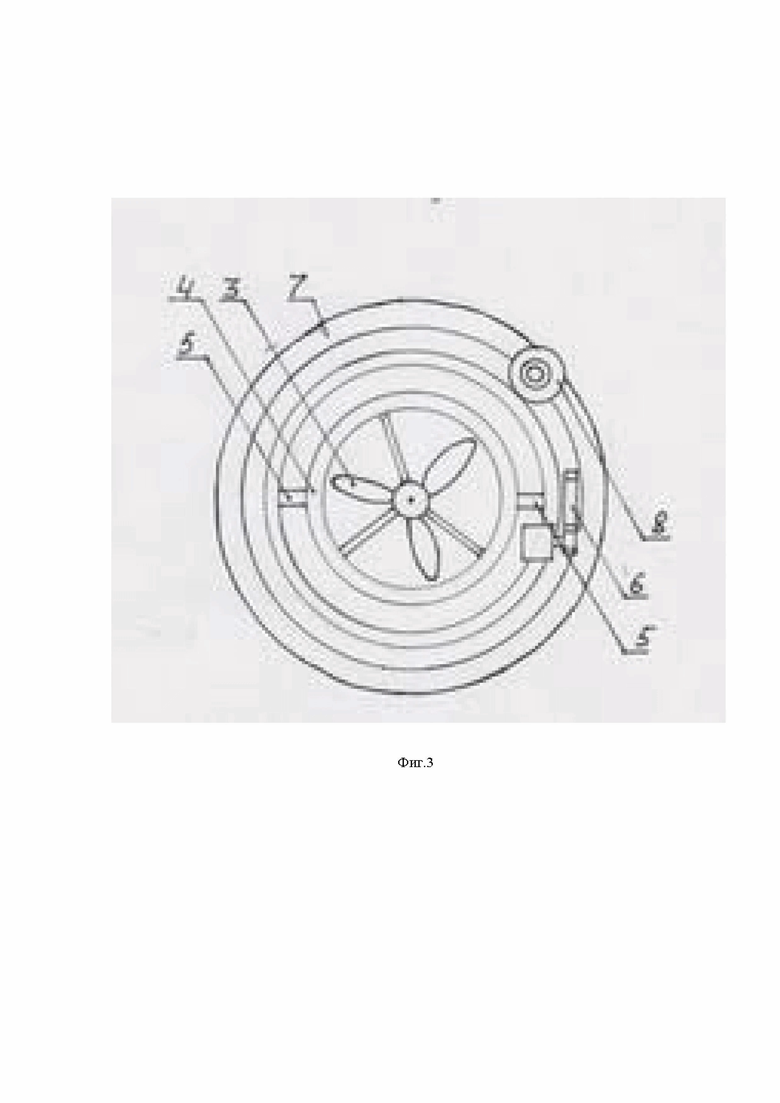
На листе 2 изображён: 3) Фиг.3 воздушный винтовой движитель с механизмом поворота винта от параллельного до перпендикулярного к плоскости мягкого крыла и поворота в плоскости мягкого крыла вид сверху.
Летательный аппарат, в различных вариантах, с мягким крылом состоит из следующих элементов: мягкого крыла 1, содержащего воздухонепроницаемый пневмокаркас 2 со сбросным и входным клапаном. Мягкое крыло 1 соединённое стропами с системой подвеса закреплённым на перемещаемом объекте, например; ранца, корпуса летательного аппарата (фюзеляжа), или с корпуса транспортного средства. Закреплённым в отверстие крыла 1 воздушного винтового движетеля3, содержащего электродвигатель с воздушным винтом на валу, установленного на кольцевой раме 4. Электродвигатель воздушного винтового движителя 3, с механизмом поворота винта от параллельного до перпендикулярного к плоскости мягкого крыла 1, закреплён на двух осях 5 вращения параллельных продольной оси крыла и снабжён электроприводом поворота 6, закреплённого на осях 5, воздушного винтового движителя 3. Механизм поворачивающие эти механизмы в плоскости мягкого крыла 1, снабжён электроприводом поворота 8 кольцевой рамы 4 в плоскости крыла 1, дополнительно установлена кольцевая опора 7, в отверстии крыла 1, на которой закреплён привод поворота 8 поворачивающий раму 4 в плоскости мягкого крыла 1.
Летательные аппараты с мягким крылом работают следующим образом: мягкое крыло 1 при наполнении воздухом каркаса 2 расправляется и принимает аэродинамический объём, запускаются воздушные винтовые движители 3,имеющие вращение винтов по и против часовой стрелки, создающие воздушный поток через отверстия в крыле направленным вниз перпендикулярно к земле, имеющий вектор тяги направленный вверх и поднимающий мягкое крыло 1,натягивая стропы , электрический кабель и гибкий воздуховод в верх. Мягкое крыло 1 устанавливается в предстартовое положение. Для ЛА с регулируемыми по величине и направлению векторами тяги воздушных потоков, использующих воздушные движители крыла и в качестве тяговых движителей, при подъёме, зависании и горизонтальном полёте, после подъёме в воздух ЛА, для горизонтального полёта, включаются воздушные винтовые движителя3, с изменяемыми направлениями потока воздуха и векторами тяги. Тем самым осуществляется дополнительное маневрирование мягкого крыла 1 в полёте, что желательно например: в конструкции воздушных змеев и устройств на их основе, тяговых кайтов, парашютов в форме крыла и летательных аппаратов на их основе. Воздушные винтовые движители 3 изменяют тягу по величине при изменение оборотов двигателей воздушных винтовых движителей 3 , и по направлению, при поворотах в кольцевой раме 4 электродвигателей воздушных винтовых движителей 3 исполнительными механизмами6 с электроприводами поворачивающие электродвигатели воздушных винтовых движителей 3, плоскостью воздушных винтов, от паралельного до перпендикулярного к плоскости мягкого крыла 1. Так же изменение направление тяги, производится поворотом в плоскости мягкого крыла 1, электроприводом поворотного механизма 8, поворачивающую кольцевую раму 4, что создаёт большие возможности для маневра крыла 1. Приземление летательных аппаратов с мягким крылом производится при включении воздушных движителей крыла в режим вертикальной тяги или с помощью строп управления. После приземления открывается сбросной клапан пневмокаркаса 2 мягкого крыла 1, воздух сбрасывается в атмосферу, крыло1 сдувается и помещается, в зависимости от конструкции ЛА, вместе со стропами и остальными элементами крыла, в ранец, сумку или отсек хранения.
Технический эффект по способу подъёма в стартовое положение и маневрирование в воздухе мягкого крыла летательных аппаратов заключается в использовании способа, как для обычных, так и режимов вертикального взлёта и посадки аппаратов, с экономичным и маневренным мягким крылом. Данный технический эффект достигается тем, что мягкое крыло с пневмокаркасом наполненным воздухом, при старте поднимается в воздух при вращении электродвигателями с воздушными винтами с управляемой тягой, по величине и направлению, установленными в отверстиях мягкого крыла, поднимая за собой стропы и электрический кабель питания, а при необходимости и гибкий воздуховод от источника сжатого воздуха. Для регулирования воздушных потоков через отверстия в крыле, изменение оборотов электродвигателя осуществляет электронный блок-регулятор оборотов двигателя, а повороты двигателя с воздушным винтом осуществляют установленные исполнительные механизмы с электроприводом, поворачивающие электродвигатели плоскостью воздушных винтов от параллельного до перпендикулярного к плоскости мягкого крыла и поворачивающие в плоскости крыла. Всё вышеперечисленное обеспечивает заявленный технический эффект предложенного изобретения.

Изобретение относится к авиационной технике и может быть использовано в способе подъёма и маневрирования мягким крылом в конструкциях парашютов, кайтов и летательных аппаратах (ЛА) с мягким крылом. В техническом решении по способу подъёма и маневрирования мягким крылом в воздухе, для удобства использования летательных аппаратов с мягким крылом, крыло в стартовое положение поднимается в воздух, натягивая стропы, и производится маневрирование крыла в полёте вне зависимости от наличия набегающего внешнего воздушного потока (ветра). Способ подъёма и маневрирования в полёте мягким крылом летательного аппарата с воздушным движителем, создающим поток воздуха, выполненного с газонепроницаемым пневмокаркасом, заполняемым от источника сжатого газа по гибкому газопроводу и через сбросной клапан освобождаемым от газа, с осуществлением подъёма мягкого крыла вертикально над перемещаемым объектом, с натяжкой системой строп, закреплённых на перемещаемом объекте, при заполнении пневмокаркаса мягкого крыла газом. При этом в газонепроницаемый пневмокаркас крыла закачан воздух, а подъём аэрошютного крыла в стартовое положение осуществляется силой тяги потока воздуха, перпендикулярного к земле и плоскости мягкого крыла, проходящего по крайне мере через одно или несколько отверстий, выполненных в мягком крыле, созданного в каждом из отверстий, при вращении воздушного винта, посаженного на вал электродвигателя воздушного движителя, а маневрирование и горизонтальный полёт летательного аппарата осуществляется регулируемой по величине и направлению силой тяги потока воздуха, создаваемой вращающимся воздушным винтом, закреплённым на валу электродвигателя воздушного движителя, по величине блоком-регулятором оборотов электродвигателя, а по направлению в положениях воздушного винта от параллельного до перпендикулярного к плоскости крыла, при изменении положения электродвигателя на двух осях вращения, закреплённых параллельно продольной оси крыла на кольцевой раме электроприводом поворота, при поступлении электроэнергии к электродвигателю, по электрическому кабелю от источника электроэнергии, закреплённого на перемещаемом объекте. Заявленное изобретение позволяет реализовать способ подъёма крыла в стартовую позицию и маневрирование мягким крылом летательного аппарата без применения подъёмной статической Архимедовой силы газа легче воздуха, позволяет реализовать способ подъём мягкого крыла летательного аппарата в стартовое положение вне зависимости от наличия внешнего воздушного потока (ветра), позволяет реализовать способ маневрирования мягкого крыла в воздухе регулируемыми по величине и направлению векторами тяги воздушных потоков, использующих воздушные движители крыла в качестве тяговых движителей при подъёме, зависании и горизонтальном полёте, позволяет реализовать сбор и хранение мягкого крыла летательного аппарата в малом объёме, например ранце или отсека для хранения в собранном виде. 1 з.п. ф-лы, 3 ил.
1. Способ подъёма и маневрирования в полёте мягким крылом летательного аппарата с воздушным движителем, создающим поток воздуха, выполненного с газонепроницаемым пневмокаркасом, заполняемым от источника сжатого газа по гибкому газопроводу и через сбросной клапан освобождаемым от газа с осуществлением подъёма мягкого крыла вертикально над перемещаемым объектом, с натяжкой системой строп, закреплённых на перемещаемом объекте, при заполнении пневмокаркаса мягкого крыла газом, отличающийся тем, что в газонепроницаемый пневмокаркас крыла закачан воздух, а подъём аэрошютного крыла в стартовое положение осуществляется силой тяги потока воздуха, перпендикулярного к земле и плоскости мягкого крыла, проходящего по крайне мере через одно или несколько отверстий, выполненных в мягком крыле, созданного в каждом из отверстий при вращении воздушного винта, посаженного на вал электродвигателя воздушного движителя, а маневрирование и горизонтальный полёт летательного аппарата осуществляется регулируемой по величине и направлению силой тяги потока воздуха, создаваемой вращающимся воздушным винтом, закреплённым на валу электродвигателя воздушного движителя, по величине блоком-регулятором оборотов электродвигателя, а по направлению в положениях воздушного винта от параллельного до перпендикулярного к плоскости крыла, при изменении положения электродвигателя на двух осях вращения, закреплённых параллельно продольной оси крыла на кольцевой раме электроприводом поворота, при поступлении электроэнергии к электродвигателю, по электрическому кабелю от источника электроэнергии, закреплённого на перемещаемом объекте.
2. Способ подъёма и маневрирования в полёте мягким крылом летательного аппарата по п.1, отличающийся тем, что регулируемой по направлению силой тяги потока воздуха, создаваемой вращающимся воздушным винтом, закреплённым на валу электродвигателя воздушного движителя, осуществляется поворот воздушного потока в плоскости мягкого крыла при повороте кольцевой рамы электроприводом поворота воздушного движителя в плоскости крыла, закреплённого на кольцевой опоре, установленной в отверстии мягкого крыла.
| Гидромеханическая коробка передач | 1978 |
|
SU701843A1 |
| US 2886265 A, 12.05.1959 | |||
| US 3450374 A, 17.06.1969 | |||
| US 6347769 B1, 19.02.2002 | |||
| US 2019193839 A1, 27.06.2019. | |||

