Предлагаемое изобретение относится к системам посадки, средствам обслуживания и обеспечения беспилотных летательных аппаратов (БПЛА) и предназначено для надежной и эффективной фиксации БПЛА на посадочной площадке безэкипажного судна.
Известно устройство для осуществления вертикального взлета и посадки судового БПЛА с использованием электромагнита, фиксирующего БПЛА после соприкосновения его посадочных опор с посадочной площадкой (Electromagnet-based takeoff and landing apparatus to operate ship – borne aerial vehicle in harsh condition. Патент Республики Корея KR1020190008046, от 23.01.2019). Устройство управляется по радиоканалу. При приземлении БПЛА на стальную палубу корабля оператором по радиоканалу подается сигнал включения электромагнитов, которые размещены в посадочных опорах БПЛА, что обеспечивает их притяжение к палубе и фиксацию БПЛА.
Недостатками этого устройства являются:
- сложность его использования в качестве средства посадки БПЛА на безэкипажное судно, так как оно требует наличие оператора, осуществляющего ручное управление;
- электромагниты, обеспечивающие фиксацию БПЛА на палубе корабля после посадки, увеличивают массу БПЛА, что приводит к уменьшению полезной нагрузки на его борту и ухудшает летные характеристики БПЛА;
- для выполнения функций фиксации БПЛА на палубе после его посадки энергия для питания электромагнитов берется от автономного источника питания БПЛА, что уменьшает его автономность и общее полетное время.
Известно, также, устройство для осуществления приземления БПЛА на посадочную площадку стационарного или движущегося объекта (Drone landing pad and drone landing method using same. Патент Республики Корея KR1020180043108 от 27.04.2018 – прототип), наиболее близкое по технической сущности к заявляемому изобретению.
Известное устройство содержит посадочную площадку, в которую установлен электромагнит, датчик приближения и блок управления, с помощью которых осуществляется контроль положения БПЛА относительно посадочной площадки, а также включение электромагнита в заданный момент времени, при этом посадочные опоры БПЛА содержат элементы из ферромагнитного материала, т.е. обладают свойством магнитного реагента. При сближении посадочных опор БПЛА с посадочной площадкой по сигналу датчика приближения от блока управления подается электроэнергия на электромагнит, который за счет возникшей магнитной связи между электромагнитом и магнитными реагентами посадочных опор притягивает последние и осуществляет фиксацию БПЛА на палубе подвижного объекта, способную выдерживать воздействие внешних возмущений в виде крена, дифферента или ветрового воздействия. Электромагнит получает энергию от системы энергообеспечения подвижного объекта, которым может являться безэкипажное судно с автономным источником энергии в виде аккумуляторной батареи. Кроме этого, устройство содержит пульт ручного управления, от которого по сигналу оператора могут подключаться, а также отключаться удерживающие электромагниты, что дает возможность осуществить взлет БПЛА.
Автоматическое приземление БПЛА обычно сопровождается определенными ошибками относительно заданной точки посадки, что приводит к необходимости иметь увеличенные размеры посадочной площадки и, соответственно, увеличенные размеры электромагнита, соизмеримые с размерами посадочной площадки устройства. В этих условиях для создания магнитного поля с параметрами, обеспечивающими требуемое силовое взаимодействие с магнитным реагентом посадочных опор БПЛА, необходимо к электромагниту подводить соответствующую повышенную энергию и, вместе с тем, технически оправданный допустимый уровень энергии вынуждает ограничивать размеры посадочной площадки.
Известное устройство для осуществления фиксации БПЛА при приземлении имеет следующие недостатки:
- ограниченные размеры посадочной площадки на судне требует высокой точности маневрирования БПЛА, которую затруднительно обеспечить при наличии качки, статического крена, дифферента или ветрового возмущения;
- большой расход электроэнергии автономного источника питания безэкипажного судна на питание электромагнита посадочной площадки.
В основу предлагаемого изобретения поставлена задача создать устройство для автоматической фиксации беспилотного летательного аппарата на посадочной площадке безэкипажного судна, обеспечивающее энергетически эффективную и надежную фиксацию БПЛА как в момент его посадки, так и в последующий до взлета интервал времени, длительность которого определяемый оператором, при наличии ветра, всех видов качки судна на волнении, а также при наличии больших статических кренов и дифферентов.
Поставленная задача достигается тем, что в устройство для автоматической фиксации беспилотного летательного аппарата вертолетного типа, имеющего посадочные опоры с магнитным реагентом, на посадочной площадке безэкипажного судна, содержащее посадочную площадку, в которую установлен электромагнит, датчик приближения БПЛА к посадочной площадке и блок управления, имеющий выход, предназначенный для управления электромагнитом, причем выход датчика приближения связан с первым входом блока управления, кроме этого устройство содержит пульт ручного управления, выход которого связан со вторым входом блока управления, электромагнит выполнен в малых габаритах относительно размеров посадочной площадки, кроме этого в посадочной площадке дополнительно размещены n аналогичных малых электромагнитов, образующих при включении равномерное поле N = n + 1 локальных концентраций магнитного потока, введены также N ключей и N измерительных преобразователей тока, при этом в блоке управления предусмотрены дополнительные n выходов и N входов, каждый из N = n + 1 выходов блока управления связан с соответствующим управляющим входом электромагнита, а каждый из N входов – с выходом соответствующего измерительного преобразователя тока электромагнита, при этом питание на каждый из электромагнитов поступает от шины питания через последовательно соединенные соответствующие ключ и измерительный преобразователь тока электромагнита.
В заявленном устройстве для автоматической фиксации беспилотного летательного аппарата вертолетного типа, имеющего посадочные опоры с магнитными реагентами, общими существенными для него и для его прототипа признаками являются:
- посадочная площадка;
- электромагнит, датчик приближения и блок управления;
- пульт ручного управления;
- выход датчика приближения связан с первым входом блока управления;
- выход ручного пульта управления связан со вторым входом блока управления,
- блока управления имеет выход, предназначенный для управления электромагнитом.
Сопоставительный анализ существенных признаков заявленного устройства и прототипа показывает, что первый в отличие от прототипа имеет следующие отличительные признаки:
- электромагнит выполнен в малых габаритах относительно размеров посадочной площадки;
- в посадочной площадке дополнительно размещены n малых электромагнитов, образующих при включении равномерное поле N = n + 1 локальных концентраций магнитного потока;
- введены N ключей и N измерительных преобразователей тока;
- в блоке управления предусмотрены дополнительные n выходов и N входов, каждый из N = n + 1 выходов блока управления связан с соответствующим управляющим входом электромагнита, а каждый из N входов – с выходом соответствующего измерительного преобразователя тока электромагнита;
- питание на каждый из электромагнитов поступает от шины питания через последовательно соединенные соответствующие ключ и измерительный преобразователь тока электромагнита.
Отличительные признаки предлагаемого решения выполняют следующие функциональные задачи для достижения требуемого технического результата.
Признак «…электромагнит выполнен в малых габаритах, относительно размеров посадочной площадки, … в посадочной площадке дополнительно размещены n малых электромагнитов, образующих при включении равномерное поле N = n + 1 локальных концентраций магнитного потока…» – позволяет использовать для удержания и фиксации БПЛА на посадочной площадке из общего количества N электромагнитов некоторое ограниченное число электромагнитов, взаимодействующих с магнитными реагентами посадочных опор, при увеличении размеров посадочной площадки до требуемых значений, при которых будет обеспечиваться надежная посадка БПЛА на безэкипажное судно в автоматическом режиме при наличии ветра, всех видов качки судна на волнении, а также при наличии больших статических кренов и дифферентов.
Признак «…введены N ключей и N измерительных преобразователей тока, … в блоке управления предусмотрены дополнительные n выходов и N входов, каждый из N = n + 1 выходов блока управления связан с соответствующим управляющим входом электромагнита, а каждый из N входов – с выходом соответствующего измерительного преобразователя тока электромагнита, … питание на каждый из электромагнитов поступает от шины питания через последовательно соединенные соответствующие ключ и измерительный преобразователь тока электромагнита» – позволяет осуществить раздельное управление электромагнитами и отключать электромагниты, не взаимодействующие с магнитными реагентами посадочных опор БПЛА, т.е. не участвующие в удержании и фиксации БПЛА на посадочной площадке устройства, что снижает общий расход электроэнергии и повышает энергетическую эффективность устройства.
Таким образом, отличительные существенные признаки заявленного устройства для автоматической фиксации беспилотного летательного аппарата вертолетного типа, имеющего посадочные опоры с магнитными реагентами, в совокупности с признаками, общими для него и прототипа, обеспечивают достижение технического результата, т.е. находятся с техническим результатом в причинно-следственной связи и решают поставленную задачу.
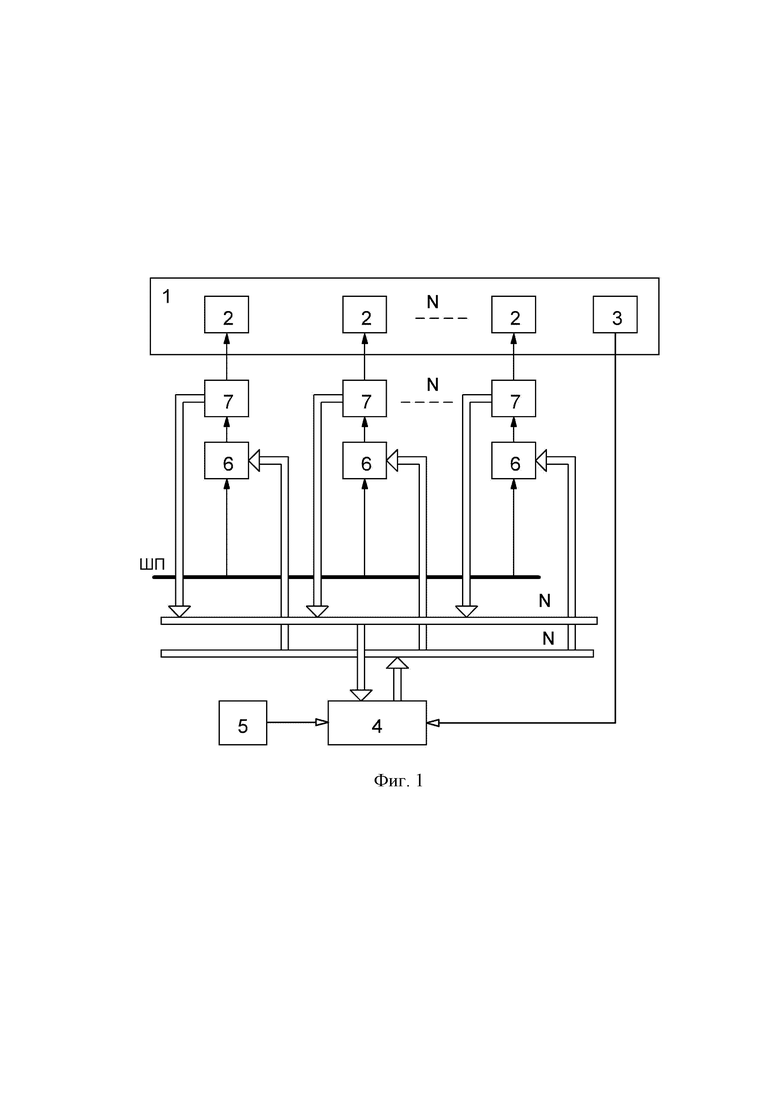
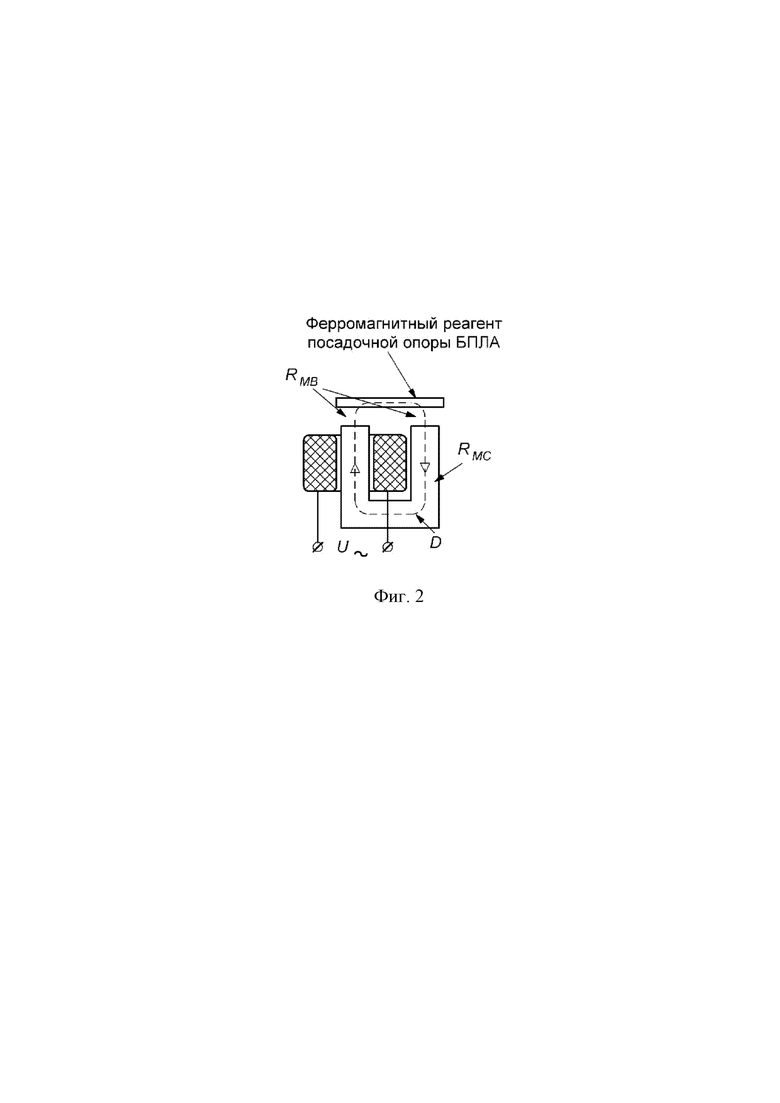
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена функциональная схема устройства, на фиг. 2 – магнитная цепь электромагнита посадочной площадки.
Устройство для автоматической фиксации беспилотного летательного аппарата вертолетного типа, имеющего посадочные опоры с магнитным реагентом, на посадочной площадке безэкипажного судна содержит посадочную площадку 1, электромагниты 2, датчик 3 приближения БПЛА к посадочной площадке 1, блок 4 управления, пульт 5 ручного управления, при этом выход датчика 3 приближения БПЛА к посадочной площадке 1 связан с первым входом блока 4 управления, а пульт 5 ручного управления соединен со вторым входом блока 4 управления.
Каждый из N электромагнитов 2 связан с шиной питания (ШП) через последовательно соединенные ключ 6 и измерительный преобразователь 7 тока электромагнита, при этом управляющие входы каждого из N ключей 6 соединены с N выходами блока 4 управления. Каждый из N дополнительных входов блока 4 управления связан с выходом соответствующего измерительного преобразователя 7 тока электромагнита.
Устройство для автоматической фиксации беспилотного летательного аппарата вертолетного типа, имеющего посадочные опоры с магнитными реагентами, работает следующим образом. От пульта 5 ручного управления активируется режим посадки БПЛА, после чего по сигналу от датчика 3 приближения выполняется контроль взаимного положения БПЛА и посадочной площадки 1. При сближении БПЛА с посадочной площадкой на заданное расстояние по сигналу от блока 4 управления включаются все N электромагнитов. На посадочной площадке 1 образуется поле локальных концентраций магнитного потока. При попадании магнитных реагентов посадочных опор в зону концентраций магнитного потока за счет магнитного взаимодействия осуществляется притяжение посадочных опор к посадочной площадке. При этом число электромагнитов, с которыми происходит непосредственное контактирование посадочных опор, будет определяться соотношениями между геометрическими размерами посадочных опор, размерами зоны концентрации магнитного потока, зависящей от контактной площадки электромагнита, а также шагом установки электромагнитов в посадочной площадке.
Электромагниты посадочной площадки имеют разомкнутый магнитопровод и обмотку переменного тока, т.е. выполнены, как схематично показано на фиг. 2. Ток в цепи обмотки определяется выражением
где U – напряжение, приложенное к катушке; R, XL – активное и индуктивное сопротивления катушки соответственно, обычно R<<XL.
Индуктивное сопротивление катушки
где ω – частота изменения тока в катушке; L – индуктивность катушки.
Индуктивность катушки L прямо пропорциональна квадрату числа витков W и обратно пропорциональна магнитному сопротивлению RМ для магнитного потока в катушке

Магнитное сопротивление магнитному потоку
где D – средняя длина силовой линии магнитного поля, μ – абсолютная магнитная проницаемость магнитопровода; S – сечение магнитопровода.
Абсолютная магнитная проницаемость μ для магнитных материалов (например, электротехническая сталь, феррит, аморфная сталь и др.) имеет большое значение, а для немагнитных – малое, отличающееся на несколько порядков, значение. Соответственно, магнитное сопротивление стали мало, а для немагнитных материалов велико. Магнитопровод электромагнита состоит из ферромагнитного участка с малым магнитным сопротивлением RМС и немагнитных участков (воздушные зазоры или иные немагнитные промежутки) с большим магнитным сопротивлением RМВ. Полное магнитное сопротивление магнитопровода определяется суммой всех этих участков, т.к. на пути магнитного потока они включены последовательно:

Магнитное сопротивление стальной части магнитопровода RМС постоянно, а второе слагаемое RМВ в выражении (5) будет уменьшаться при перекрытии немагнитных участков ферромагнитным реагентом посадочной опоры. В этом случае будет также уменьшаться суммарное магнитное сопротивление RM магнитопровода электромагнита (5), увеличиваться индуктивность L катушки (3) и, соответственно, ее индуктивное сопротивление XL (2), что приведет к уменьшению тока (1). В катушках электромагнитов с неперекрытым магнитопроводом, ток останется сравнительно большим.
Информация о снижении тока в обмотках определенных электромагнитов, перекрытых магнитным реагентом посадочных опор, передается в блок 4 управления, за счет чего остальные электромагниты, не участвующие в удержании и фиксации БПЛА, отключаются. При этом происходит существенное снижение потребляемой электроэнергии, что повышает энергетическую эффективность устройства. Использование N электромагнитов с распределенными по посадочной площадке зонами локальных концентраций магнитного потока, ограниченное количество которых обладает способностью надежно удерживать и фиксировать БПЛА на посадочной площадке, позволяет выполнить площадку с размерами, достаточными для посадки БПЛА без предъявления повышенных требований к точности его маневрирования.
При необходимости осуществить взлет БПЛА оператором через пульт 5 ручного управления подается соответствующая команда на блок 4 управления, отключающая удерживающие электромагниты.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ФИКСАЦИИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТОЛЕТНОГО ТИПА НА ПОСАДОЧНОЙ ПЛОЩАДКЕ БЕЗЭКИПАЖНОГО СУДНА С БЕСКОНТАКТНОЙ ПЕРЕДАЧЕЙ ЭЛЕКТРОЭНЕРГИИ ДЛЯ ЗАРЯДА АККУМУЛЯТОРНЫХ БАТАРЕЙ | 2021 |
|
RU2765726C1 |
| Пост наблюдения на базе привязного беспилотного летательного аппарата | 2023 |
|
RU2807768C1 |
| Способ освещения подводной обстановки и нейтрализации обнаруженных объектов | 2022 |
|
RU2789185C1 |
| БЕЗЭКИПАЖНЫЙ КАТЕР, ОСНАЩЕННЫЙ УСТРОЙСТВОМ ДЛЯ ПОДЗАРЯДКИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ВЕРТОЛЕТНОГО ТИПА | 2023 |
|
RU2831111C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Беспилотный летательный аппарат и способ посадки такого аппарата | 2022 |
|
RU2808061C1 |
| УСТРОЙСТВО ДЛЯ ВЗЛЕТА И ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2694251C2 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2666975C1 |
| СИСТЕМА МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ СРЕДСТВ СВЯЗИ И НАВИГАЦИОННОГО ОБОРУДОВАНИЯ | 2021 |
|
RU2774400C1 |
Устройство для автоматической фиксации беспилотного летательного аппарата вертолетного типа (БПЛА) содержит размещенные на площадке безэкипажного судна посадочные опоры с магнитным реагентом, посадочную площадку, в которую установлен электромагнит, датчик приближения БПЛА к посадочной площадке, блок управления, имеющий выход, предназначенный для управления электромагнитом, пульт ручного управления, размещенные в посадочной платформе n аналогичных малых электромагнитов, образующих при включении равномерное поле N = n + 1 локальных концентраций магнитного потока, N ключей и N измерительных преобразователей тока. Обеспечивается повышение эффективности и надежности фиксации БПЛА на судне в условиях качки, ветра и при наличии больших статических кренов и дифферентов. 2 ил.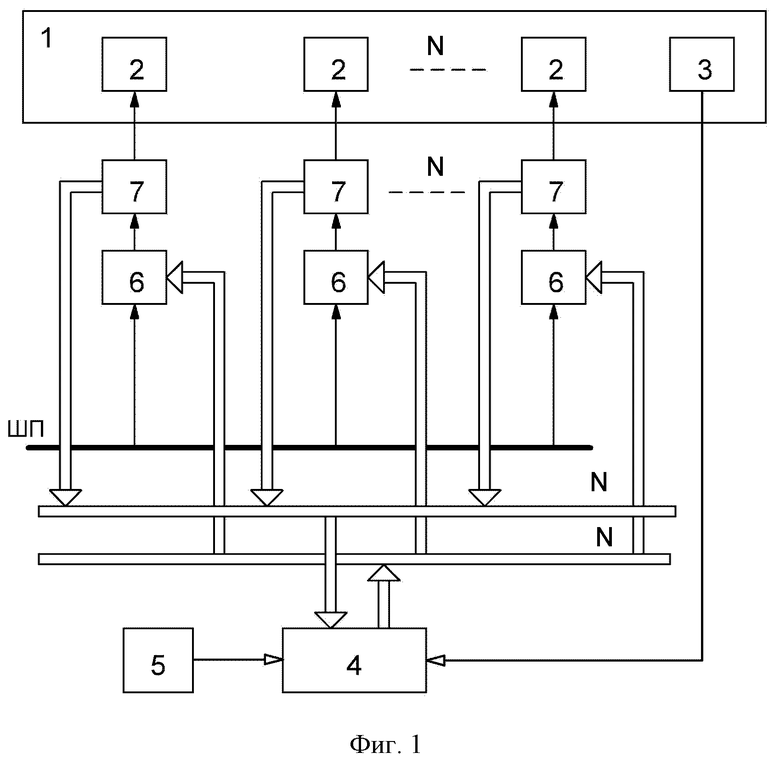
Устройство для автоматической фиксации беспилотного летательного аппарата (БПЛА) вертолетного типа, имеющего посадочные опоры с магнитным реагентом, на посадочной площадке безэкипажного судна, содержащее посадочную площадку, в которую установлен электромагнит, датчик приближения БПЛА к посадочной площадке и блок управления, имеющий выход, предназначенный для управления электромагнитом, причем выход датчика приближения связан с первым входом блока управления, кроме этого устройство содержит пульт ручного управления, выход которого связан со вторым входом блока управления, отличается тем, что электромагнит выполнен в малых габаритах относительно размеров посадочной площадки, в посадочной площадке дополнительно размещены n аналогичных малых электромагнитов, образующих при включении равномерное поле N = n + 1 локальных концентраций магнитного потока, введены также N ключей и N измерительных преобразователей тока, в блоке управления предусмотрены дополнительные n выходов и N входов, каждый из N = n + 1 выходов блока управления связан с соответствующим управляющим входом электромагнита, а каждый из N входов – с выходом соответствующего измерительного преобразователя тока электромагнита, при этом питание на каждый из электромагнитов поступает от шины питания через последовательно соединенные соответствующие ключ и измерительный преобразователь тока электромагнита.
| Станция автоматической замены аккумуляторов для беспилотных летательных аппаратов (БПЛА) | 2019 |
|
RU2723267C1 |
| KR 2019008046 A, 23.01.2019 | |||
| KR 1020170065106 A, 13.06.2017 | |||
| CN 108528749 A, 14.09.2018 | |||
| CN 108698709 A, 23.10.2018. | |||

