Изобретение относится к космической технике и может быть использовано в процессе применения космических аппаратов, предназначенных для получения информации о наземных объектах.
Существующие космические аппараты, как правило, осуществляют наблюдение земной поверхности с кратносинхронных орбит, которые обеспечивают ежесуточное смещение трассы на величину ширины полосы обзора с небольшим перекрытием. В результате за несколько суток обеспечивается глобальный просмотр земной поверхности, предусматривающий последовательное наблюдение всех районов земной поверхности в пределах диапазона широт, несколько превышающих по величине наклонение орбиты (Основы теории полета космических аппаратов. Под ред. д-ра физ.-мат.наук Г.С. Нариманова и д-ра техн. наук М.К. Тихонравова. М., «Машиностроение», 1972, 608 с., стр. 253-255). Существенный недостаток данного способа состоит в низкой оперативности наблюдения районов земной поверхности, в частности районов чрезвычайных ситуаций, из-за низкой периодичности обзора, составляющей 3-5 суток в зависимости от высоты орбиты. (Цируль Д.Г., Ермолаев В.И. Двухрежимный способ наблюдения земной поверхности и анализ возможности его применения при функционировании космических аппаратов дистанционного зондирования Земли // Вестник СибГАУ. Том 18, №1. с. 176-186).
Известен способ наблюдения земной поверхности из космоса (Ермолаев В.И., Цируль Д.Г. Патент RU 2670081 C1, опубл. 17.10.2018, заявл. 04.04.2016), который предусматривает использование для наблюдения земной поверхности кратных геосинхронных орбит и квазисинхронных орбит. Кратные геосинхронные орбиты позволяют осуществлять глобальный обзор земной поверхности, квазисинхронные орбиты обеспечивают ежесуточное повторение трассы космического аппарата, за счет чего обеспечивается повышение оперативности наблюдения отдельных районов земной поверхности. Недостатком данного способа является низкая оперативность изменения района наблюдения на земной поверхности, поскольку для изменения района наблюдения предполагается возвращение космического аппарата на кратную геосинхронную орбиту с последующим перелетом в требуемую точку на квазисинхронной орбите.
Наиболее близким к заявленному изобретению следует считать способ изменения района наблюдения на земной поверхности (Ermolaev V.I., Buksar M.Yu. Methods for operational observation of the Earth’s surface given areas by Earth remote sensing spacecrafts // XLV Academic Space Conference, Dedicated to the Memory of Academician S.P. Korolev and Other Outstanding National Scientists - Pioneers of Space Exploration, AIP Conf. Proc. 2549, 2023, pp. 030002-1-030002-9. https://doi.org/10.1063/5.0107999), который предусматривает изменение района наблюдения на земной поверхности путем смещения трассы полета космического аппарата по долготе за счет изменения аргумента широты космического аппарата на квазисинхронной орбите. Изменение аргумента широты космического аппарата осуществляют путем перехода с квазисинхронной орбиты на орбиту фазирования, фазирования на этой орбите и возвращения на квазисинхронную орбиту в другую рабочую точку, обеспечивающую прохождение трассы космического аппарата через требуемый район на земной поверхности. Недостатком данного способа являются существенные временные затраты на изменение района наблюдения, обусловленные фазированием и перелетами между квазисинхронной орбитой и орбитой фазирования.
Задачей предлагаемого изобретения является повышение оперативности изменения района наблюдения на земной поверхности.
Указанная задача решается за счет того, что для изменения аргумента широты космического аппарата на квазисинхронной орбите при помощи двигательной установки космического аппарата одновременно создают трансверсальное реактивное ускорение и радиальное реактивное ускорение, определяемое по формуле:
 ,
,
где Δv - разница между скоростью космического аппарата и орбитальной скоростью, R - радиус квазисинхронной орбиты, μ - гравитационный параметр Земли. Изменяют аргумент широты космического аппарата за счет отличия скорости космического аппарата от орбитальной скорости, при этом удерживают космический аппарат на квазисинхронной орбите за счет радиального реактивного ускорения. К моменту достижения требуемого изменения аргумента широты приводят разность между скоростью космического аппарата и орбитальной скоростью к нулевому значению за счет создания обратного трансверсального реактивного ускорения. При этом величину радиального реактивного ускорения снижают до нулевого значения в соответствии с приведенной выше формулой. После этого выключают двигательную установку.
Удержание космического аппарата на квазисинхронной орбите в процессе изменения аргумента широты космического аппарата обеспечивает перемещение космического аппарата в новую рабочую точку на квазисинхронной орбите за минимальное время, что обеспечивает повышение оперативности смещения трассы космического аппарата по долготе. Соответственно, технический результат реализации предлагаемого способа заключается в повешении оперативности изменения района наблюдения на земной поверхности.
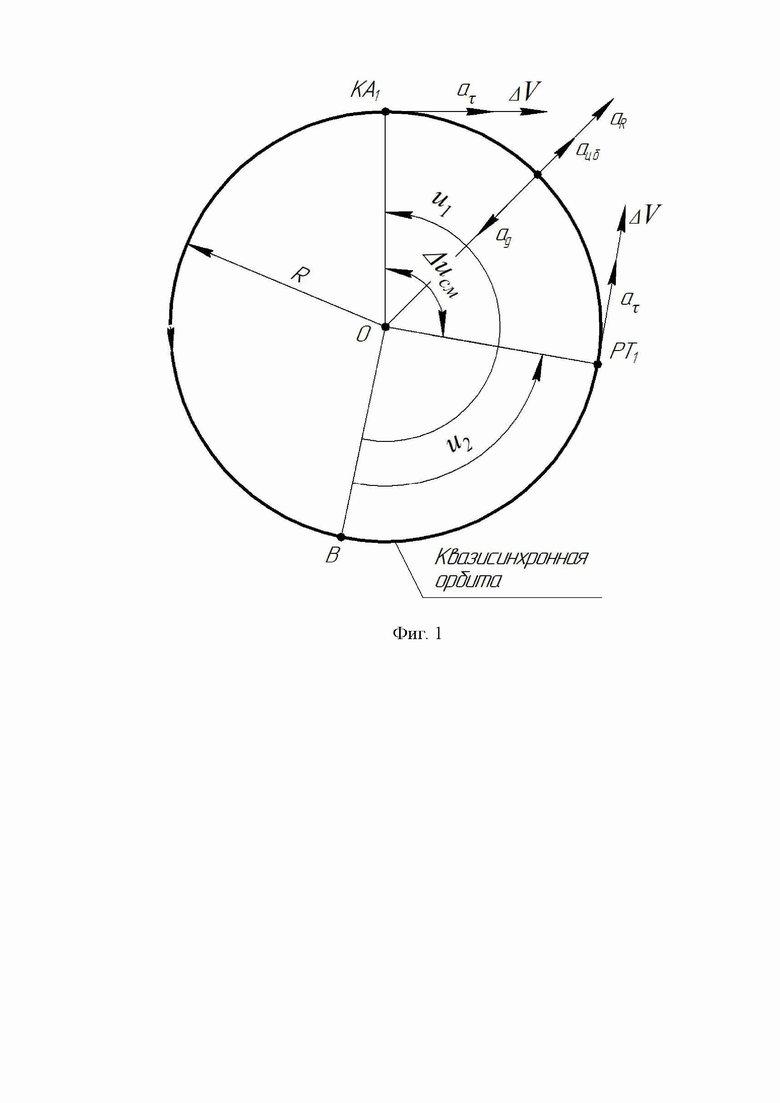
Сущность предлагаемого способа иллюстрирует схема перелета космического аппарата в случае уменьшения аргумента широты космического аппарата, представленная на фиг 1.
На фиг 1. представлены следующие обозначения:
R - радиус квазисинхронной орбиты;
О - центр квазисинхронной орбиты;
В - восходящий узел квазисинхронной орбиты;
КА1 - начальная рабочая точка космического аппарата на квазисинхронной орбите;
PT1 - рабочая точка на квазисинхронной орбите, обеспечивающая возможность наблюдения заданного района;
u1 - аргумент широты начальной рабочей точки космического аппарата;
u2 - аргумент широты требуемой рабочей точки космического аппарата;
Δuсм - смещение между точками КА1 и РТ1 по аргументу широты;
ΔV - разница между скоростью космического аппарата и орбитальной скоростью;
аτ - трансверсальное ускорение;
aR - радиальное ускорение;
ацб - центробежное ускорение;
ag - гравитационное ускорение.
Для подтверждения возможности достижения технического результата используются фиг. 2 - фиг. 5.
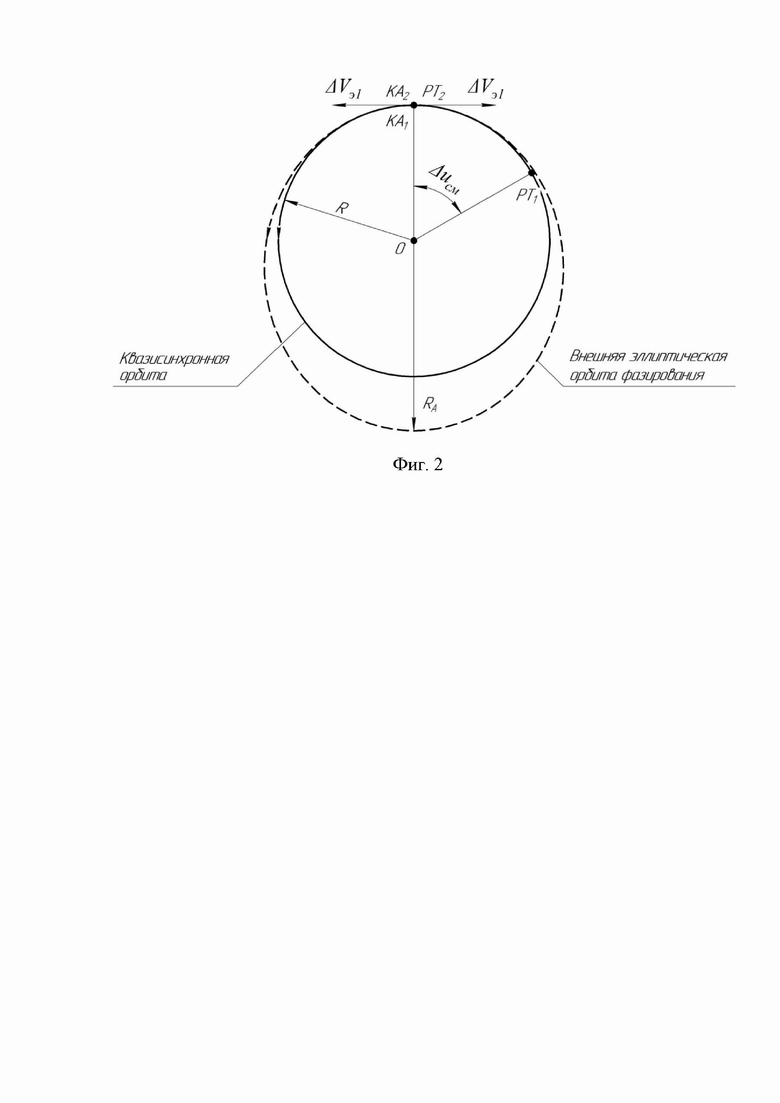
На фиг. 2 представлена схема перелета космического аппарата при изменении района наблюдения на земной поверхности при помощи внешней эллиптической орбиты фазирования. Использованы следующие обозначения:
R - радиус квазисинхронной орбиты;
О - центр квазисинхронной орбиты;
RA - радиус апогея внешней эллиптической орбиты фазирования;
КА1 - начальная рабочая точка космического аппарата на квазисинхронной орбите;
РТ1 - рабочая точка на квазисинхронной орбите, обеспечивающая возможность наблюдения заданного района;
Δuсм - смещение между точками КА1 и РТ1 по аргументу широты;
КА2 - конечная рабочая точка космического аппарата на квазисинхронной орбите;
РТ2 - конечное положение требуемой рабочей точки, обеспечивающей возможность наблюдения заданного района, на квазисинхронной орбите;
ΔVэ1 - импульсные изменения характеристической скорости.
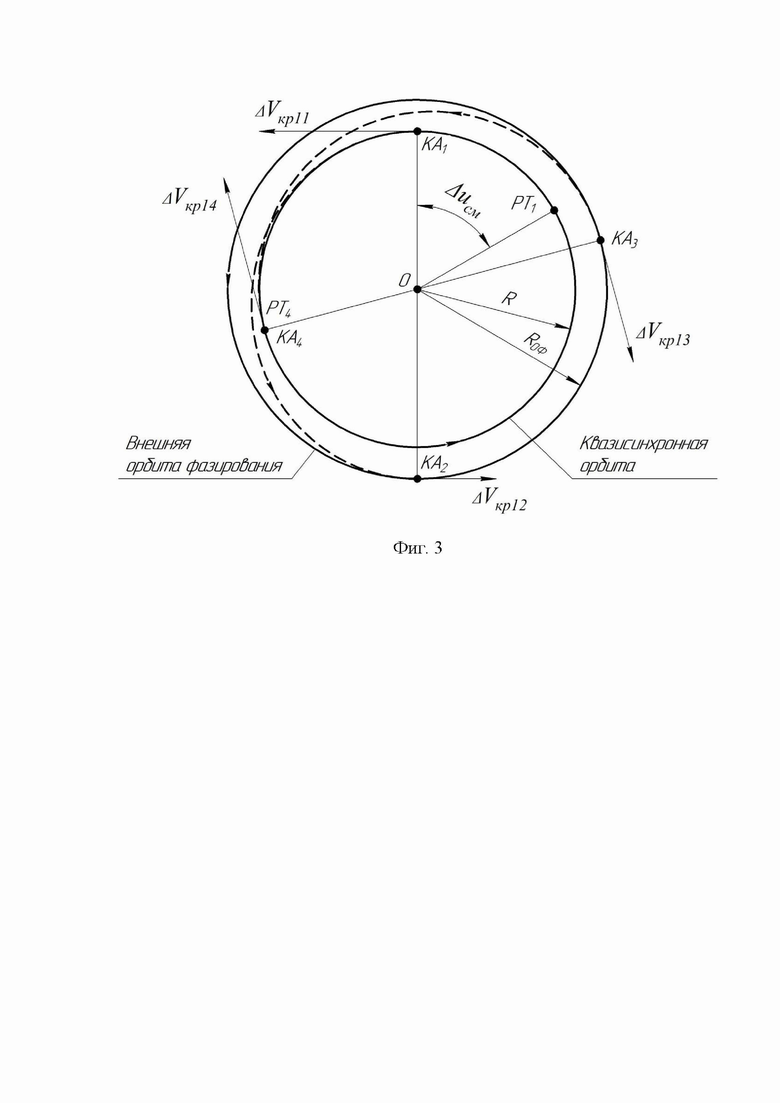
На фиг. 3 представлена схема перелета космического аппарата при изменении района наблюдения на земной поверхности при помощи внешней круговой орбиты фазирования. Использованы следующие обозначения:
R - радиус квазисинхронной орбиты;
О - центр квазисинхронной орбиты;
RОФ - радиус орбиты фазирования;
KA1 - начальная рабочая точка космического аппарата на квазисинхронной орбите;
PT1 - рабочая точка на квазисинхронной орбите, обеспечивающая возможность наблюдения заданного района;
Δuсм - смещение между точками КА1 и PT1 по аргументу широты;
КА2, КА3 - рабочие точки космического аппарата на орбите фазирования;
КА4 - конечная рабочая точка космического аппарата на квазисинхронной орбите;
РТ4 - конечное положение требуемой рабочей точки, обеспечивающей возможность наблюдения заданного района, на квазисинхронной орбите;
ΔVкр11, ΔVкр12, ΔVкр13, ΔVкр14 - импульсные изменения характеристической скорости.
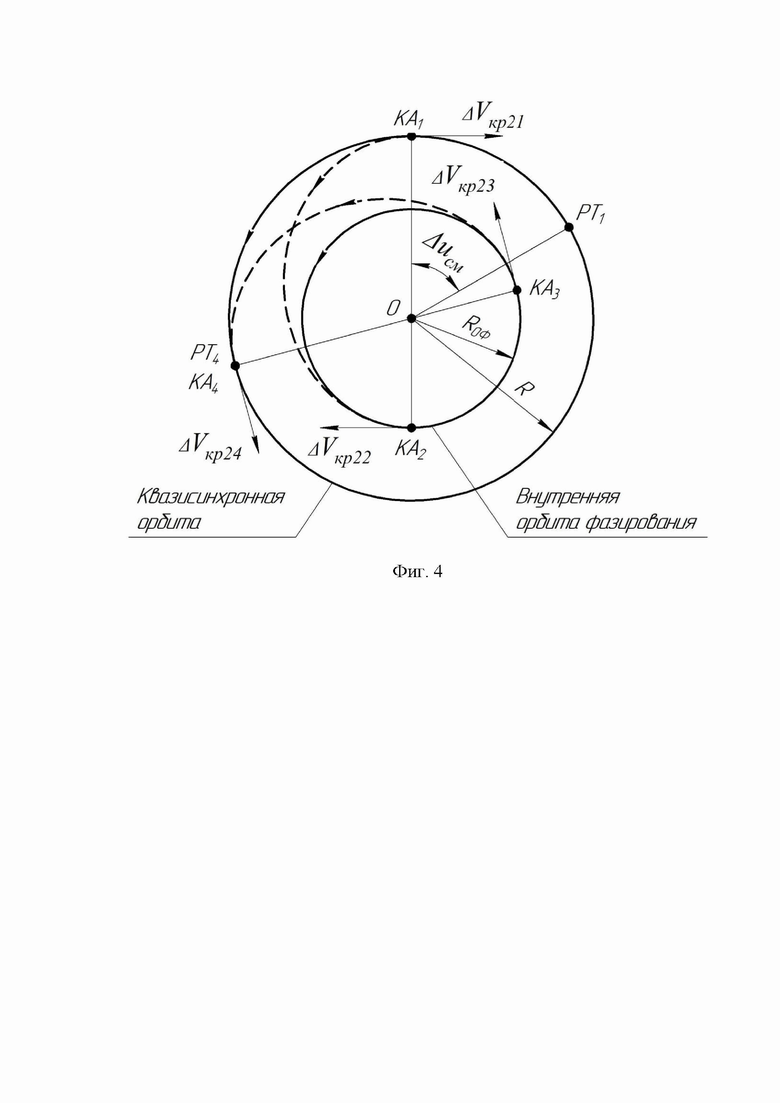
На фиг. 4 представлена схема перелета космического аппарата при изменении района наблюдения на земной поверхности при помощи внутренней круговой орбиты фазирования. Использованы следующие обозначения:
R - радиус квазисинхронной орбиты;
О - центр квазисинхронной орбиты;
RОФ - радиус орбиты фазирования;
КА1 - начальная рабочая точка космического аппарата на квазисинхронной орбите;
PT1 - рабочая точка на квазисинхронной орбите, обеспечивающая возможность наблюдения заданного района;
Δuсм - смещение между точками КА1 иРТ1 по аргументу широты;
КА2, КА3 - рабочие точки космического аппарата на орбите фазирования;
КА4 - конечная рабочая точка космического аппарата на квазисинхронной орбите;
РТ4 - конечное положение требуемой рабочей точки, обеспечивающей возможность наблюдения заданного района, на квазисинхронной орбите;
ΔVкр21, ΔVкр22, ΔVкр23, ΔVкр24 - импульсные изменения характеристической скорости на переход на круговую орбиту фазирования.
Для подтверждения достижения технического результата на фиг. 5 приведены графики зависимостей временных затрат на изменение района наблюдения от величины угла смещения по аргументу широты между начальной рабочей точкой космического аппарата и требуемой рабочей точкой, обеспечивающей возможность наблюдения заданного района. Использованы следующие обозначения:
Δt∑ - временные затраты на изменение района наблюдения;
Δuсм - угол смещения по аргументу широты между начальной рабочей точкой космического аппарата и требуемой рабочей точкой, обеспечивающей возможность наблюдения заданного района;
1 - предложенный способ в случае, когда разница между скоростью космического аппарата и орбитальной скоростью составляет 100 м/с;
2 - предложенный способ в случае, когда разница между скоростью космического аппарата и орбитальной скоростью составляет 150 м/с;
3 - перелет с использованием внешней круговой орбиты фазирования в случае, когда высота орбиты фазирования равна 570 км;
4 - перелет с использованием внешней круговой орбиты фазирования в случае, когда высота орбиты фазирования равна 600 км;
5 - перелет с использованием внутренней круговой орбиты фазирования в случае, когда высота орбиты фазирования равна 450 км;
6 - перелет с использованием внутренней круговой орбиты фазирования в случае, когда высота орбиты фазирования равна 480 км;
7 - перелет с использованием внешней эллиптической орбиты фазирования в случае, когда космический аппарат совершает по эллиптической орбите 5 оборотов;
8 - перелет с использованием внешней эллиптической орбиты фазирования в случае, когда космический аппарат совершает по эллиптической орбите 10 оборотов.
Космический аппарат вращается вокруг Земли по квазисинхронной орбите с радиусом R и центром в точке О (см. фиг. 1). Пусть космический аппарат находится в рабочей точке КА1 на квазисинхронной рабочей орбите. Для смещения трассы полета с целью изменения наблюдаемого района земной поверхности космический аппарат должен оказаться в рабочей точке РТ1 смещенной относительно точки КА1 по аргументу широты на угол Δuсм.
Для уменьшения аргумента широты космического аппарата на квазисинхронной орбите при помощи двигательной установки создают трансверсальное реактивное ускорение аτ, которое противоположно направлено скорости космического аппарата. Уменьшают скорость движения космического аппарата по квазисинхронной орбите на величину ΔV.
Одновременно при помощи двигательной установки создают радиальное реактивное ускорение, направленное по радиус-вектору космического аппарата. За счет радиального реактивного ускорения удерживают космический аппарат на квазисинхронной рабочей орбите.
Перед достижением требуемого изменения аргумента широты (точка PT1) при помощи двигательной установки создают обратное трансверсальное реактивное ускорение аτ, за счет которого приводят разность между скоростью космического аппарата и орбитальной скоростью к нулевому значению. При этом величину радиального реактивного ускорения снижают до нулевого значения в соответствии с приведенной выше формулой. После этого выключают двигательную установку.
Будем полагать, что изменения скорости космического аппарата происходят импульсно.
За счет отличия скорости космического аппарата от орбитальной обеспечивают требуемое изменение аргумента широты космического аппарата. Угол смещения между точками КА1 и РТ1 определяется следующим выражением:
 ,
,
где ΔV - разница между скоростью космического аппарата и орбитальной скоростью, Δt - время изменения аргумента широты космического аппарата на квазисинхронной орбите, R - радиус квазисинхронной орбиты.
За счет радиального ускорения обеспечивают нахождение космического аппарата на квазисинхронной орбите. Величину радиального ускорения aR можно определить из следующего выражения:

где ацб - величина центробежного ускорения, ag - величина гравитационного ускорения, определяемые выражениями:
где μ - гравитационный параметр Земли.
Используя выражения (1)-(3), получим требуемую величину радиального ускорения:
При уменьшении аргумента широты космического аппарата разница между скоростью космического аппарата и орбитальной скоростью ΔV является отрицательной величиной. При увеличении аргумента широты космического аппарата разница ΔV является положительной величиной.
Если разница между скоростью космического аппарата и орбитальной скоростью будет положительной, то второе слагаемое в выражении (4) превысит первое, и радиальное ускорение будет отрицательным. Если указанная разница скоростей будет отрицательной, то второе слагаемое в выражении (4) будет меньше, и радиальное ускорение будет положительным.
Удержание космического аппарата на квазисинхронной орбите в процессе изменения аргумента широты космического аппарата обеспечивает перемещение космического аппарата в новую рабочую точку на квазисинхронной орбите за минимальное время, что обеспечивает повышение оперативности изменения трассы космического аппарата по долготе.
Для подтверждения возможности достижения технического результата предлагаемого изобретения необходимо сравнить временные затраты на изменение района наблюдения при помощи предложенного способа с временными затратами на изменение района наблюдения при помощи прототипа. При этом в качестве орбит фазирования рассматривались не только кратные геосинхронные орбиты, указанные в прототипе. Альтернативными вариантами орбит фазирования могут быть:
- внутренняя или внешняя эллиптические орбиты фазирования;
- внутренняя или внешняя круговые орбиты фазирования.
Перелет с использованием внешней эллиптической орбиты фазирования осуществляется следующим образом (см. фиг. 2). Космический аппарат вращается вокруг Земли по квазисинхронной орбите с радиусом R и центром в точке О. Пусть космический аппарат находится в рабочей точке КА1 на квазисинхронной орбите. Для смещения трассы полета с целью изменения района наблюдения на земной поверхности космический аппарат должен оказаться в рабочей точке РТ1, смещенной относительно точки KA1 по аргументу широты на угол Δuсм.
Для смещения трассы полета при помощи двигательной установки космического аппарата создают трансверсальный импульс ΔVэ1 в направлении движения, после чего космический аппарат переходит на эллиптическую орбиту фазирования, по которой совершает один или несколько полных оборотов.
Когда космический аппарат оказывается в точке КА2, в которой одновременно находится требуемая рабочая точка РТ2, при помощи двигательной установки космического аппарата создают трансверсальный импульс ΔVэ1 в направлении, противоположном движению.
Перелет с использованием круговых орбит фазирования осуществляется следующим образом (см. фиг. 3, фиг. 4). Космический аппарат вращается вокруг Земли по квазисинхронной орбите с радиусом R и центром в точке О. Пусть космический аппарат находится в рабочей точке КА1 на квазисинхронной орбите. Для смещения трассы полета с целью изменения района наблюдения на земной поверхности космический аппарат должен оказаться в рабочей точке PT1, смещенной относительно точки КА1 по аргументу широты на угол Δuсм.
Для смещения трассы полета при помощи двигательной установки космического аппарата создают трансверсальный импульс (ΔVкр11 в случае использования внешней круговой орбиты фазирования, ΔVкр21 в случае использования внутренней круговой орбиты фазирования), после чего космический аппарат переходит на переходную эллиптическую орбиту. При достижении промежуточной рабочей точки КА2 на орбите фазирования при помощи двигательной установки создают трансверсальный импульс (ΔVкрl2 в случае использования внешней круговой орбиты фазирования, ΔVкр22 в случае использования внутренней круговой орбиты фазирования), после чего космический аппарат переходит на орбиту фазирования. На орбите фазирования космический аппарат находится до достижения промежуточной рабочей точки КА3, в которой при помощи двигательной установки космического аппарата создают трансверсальный импульс (ΔVкр13 в случае использования внешней круговой орбиты фазирования, ΔVкр23 в случае использования внутренней круговой орбиты фазирования), после чего космический аппарат переходит на переходную эллиптическую орбиту. После окончания перелета по переходной эллиптической орбите космический аппарат оказывается в рабочей точке КА4, в которой одновременно оказывается требуемая рабочая точка РТ4. В точке КА4 при помощи двигательной установки космического аппарата создают трансверсальный импульс (ΔVкрl4 в случае использования внешней круговой орбиты фазирования, ΔVкр24 в случае использования внутренней круговой орбиты фазирования), в результате чего космический аппарат снова переходит на квазисинхронную орбиту.
Для расчета времени изменения района наблюдения способом, предложенным в прототипе, использовались методики, изложенные в (Цируль Д.Г., Ермолаев В.И. Двухрежимный способ наблюдения земной поверхности и анализ возможности его применения при функционировании космических аппаратов дистанционного зондирования Земли // Вестник СибГАУ. Том 18, №1. с. 176-186).
На фиг. 5 представлены зависимости временных затрат на изменение района наблюдения от величины требуемого угла смещения по аргументу широты. Графики представлены для случая использования квазисинхронной орбиты высотой 561,4 км.
Из зависимостей, представленных на фиг. 5, следует, что при значениях изменения аргумента широты до 10 градусов предложенный способ позволяет существенно повысить оперативность изменения района наблюдения на земной поверхности даже при относительно небольших изменениях скорости космического аппарата по сравнению с орбитальной скоростью. Например, при изменении аргумента широты, равном 5 градусам, выигрыш в оперативности изменения района наблюдения составляет величину 51,6% при разнице между скоростью космического аппарата и орбитальной скоростью 100 м/с, и 67,7% при разнице между скоростью космического аппарата и орбитальной скоростью 150 м/с.
Изобретение относится к области космической техники, а именно к способам изменения района наблюдения земной поверхности спутниками. Для этого при помощи двигательной установки космического аппарата одновременно создают трансверсальное реактивное ускорение и радиальное реактивное ускорение, определяемое по формуле
 ,
,
где  - разница между скоростью космического аппарата и орбитальной скоростью, R – радиус квазисинхронной орбиты, μ – гравитационный параметр Земли. Изменяют аргумент широты космического аппарата за счет отличия скорости космического аппарата от орбитальной скорости, при этом удерживают космический аппарат на квазисинхронной орбите за счет радиального реактивного ускорения. К моменту достижения требуемого изменения аргумента широты приводят разность между скоростью космического аппарата и орбитальной скоростью к нулевому значению за счет создания обратного трансверсального реактивного ускорения, при этом величину радиального реактивного ускорения снижают до нулевого значения в соответствии с приведенной выше формулой и выключают двигательную установку. Достигается повышение оперативности изменения района наблюдения на земной поверхности. 5 ил.
- разница между скоростью космического аппарата и орбитальной скоростью, R – радиус квазисинхронной орбиты, μ – гравитационный параметр Земли. Изменяют аргумент широты космического аппарата за счет отличия скорости космического аппарата от орбитальной скорости, при этом удерживают космический аппарат на квазисинхронной орбите за счет радиального реактивного ускорения. К моменту достижения требуемого изменения аргумента широты приводят разность между скоростью космического аппарата и орбитальной скоростью к нулевому значению за счет создания обратного трансверсального реактивного ускорения, при этом величину радиального реактивного ускорения снижают до нулевого значения в соответствии с приведенной выше формулой и выключают двигательную установку. Достигается повышение оперативности изменения района наблюдения на земной поверхности. 5 ил.
Способ изменения района наблюдения на земной поверхности, включающий
смещение трассы полета космического аппарата по долготе за счет изменения аргумента широты космического аппарата на квазисинхронной орбите, отличающийся тем, что при помощи двигательной установки космического аппарата одновременно создают трансверсальное реактивное ускорение и радиальное реактивное ускорение, определяемое по формуле
 ,
,
где  – разница между скоростью космического аппарата и орбитальной скоростью, R – радиус квазисинхронной орбиты, μ – гравитационный параметр Земли, изменяют аргумент широты космического аппарата за счет отличия скорости космического аппарата от орбитальной скорости, при этом удерживают космический аппарат на квазисинхронной орбите за счет радиального реактивного ускорения, к моменту достижения требуемого изменения аргумента широты приводят разность между скоростью космического аппарата и орбитальной скоростью к нулевому значению за счет создания обратного трансверсального реактивного ускорения, при этом величину радиального реактивного ускорения снижают до нулевого значения в соответствии с приведенной выше формулой и выключают двигательную установку.
– разница между скоростью космического аппарата и орбитальной скоростью, R – радиус квазисинхронной орбиты, μ – гравитационный параметр Земли, изменяют аргумент широты космического аппарата за счет отличия скорости космического аппарата от орбитальной скорости, при этом удерживают космический аппарат на квазисинхронной орбите за счет радиального реактивного ускорения, к моменту достижения требуемого изменения аргумента широты приводят разность между скоростью космического аппарата и орбитальной скоростью к нулевому значению за счет создания обратного трансверсального реактивного ускорения, при этом величину радиального реактивного ускорения снижают до нулевого значения в соответствии с приведенной выше формулой и выключают двигательную установку.
| СПОСОБ НАБЛЮДЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ ИЗ КОСМОСА | 2016 |
|
RU2670081C1 |
| Способ формирования группировки космических аппаратов для локального наблюдения заданной области планеты | 2017 |
|
RU2671601C1 |
| СПОСОБ ПРОВЕДЕНИЯ СЪЕМОК ЗЕМНОЙ ПОВЕРХНОСТИ ИЗ КОСМОСА | 2001 |
|
RU2232110C2 |
| US 6892986 B2, 17.05.2005. | |||

