Изобретение относится к робототехнике и может быть использовано в системах копирующего управления антропоморфными манипуляторами.
Известен комплекс копирующего управления с задающей рукояткой [Е.И. Юревич «Управление роботами и робототехническими системами». - СПб: СПбГТУ, 2000. - 171 с. - с.131-133], который включает в себя блок механической системы задающего устройства, блок датчиков задающего устройства, блок решения обратной задачи кинематики, блок управления приводами антропоморфного манипулятора. Данный комплекс позволяет организовать копирующее управление антропоморфным манипулятором.
Существенными признаками аналога, совпадающими с признаками заявляемого изобретения, являются блок механической системы задающего устройства, блок датчиков задающего устройства, блок управления приводами антропоморфного манипулятора.
Недостатками комплекса копирующего управления являются ограниченные функциональные возможности. В частности, данная система копирующего управления ориентирована на использование задающей рукоятки в качестве задающего устройства, что позволяет оператору управлять одной рукой только тремя степенями подвижности исполнительного манипулятора, в то время как антропоморфный исполнительный манипулятор имеет семь степеней подвижности. С другой стороны, использование задающей рукоятки не позволяет осуществлять интуитивное управление и контролировать положение локтевого узла исполнительного манипулятора.
Известна структура комплекса управления на основе копирующего манипулятора [Е.И. Юревич «Управление роботами и робототехническими системами». - СПб: СПбГТУ, 2000. - 171 с. - с.123-131], которая предполагает наличие блока механической системы задающего устройства, блока датчиков задающего устройства, блока управления приводами антропоморфного манипулятора. Эта структура позволяет организовать копирующее управление антропоморфным манипулятором.
Существенными признаками аналога, совпадающими с признаками заявляемого изобретения, являются блок механической системы задающего устройства, блок датчиков задающего устройства, блок управления приводами антропоморфного манипулятора.
Недостатками данной структуры являются невозможность одновременного управления всеми степенями подвижности антропоморфного манипулятора, сложность интуитивного управления оператором всеми степенями подвижности исполнительного манипулятора, ограниченность рабочей зоны. Они обусловлены тем обстоятельством, что за счет позиционирования и ориентации рабочего окончания задающего манипулятора может быть осуществлено управление только шестью степенями подвижности исполнительного манипулятора, в то время как антропоморфный исполнительный манипулятор зачастую содержит семь степеней подвижности. Дополнительно, при использовании аналога производится копирование движений не руки оператора, а задающего манипулятора, приводимого в движение рукой оператора. Таким образом, теряется естественность и интуитивность управления исполнительным манипулятором, сужается рабочая зона.
Устройством, наиболее близким по технической сущности к предлагаемому изобретению (прототипом), является комплекс управления антропоморфным манипулятором (заявка на изобретение RU 2018146275 A), который включает в себя блок механической системы задающего устройства, блок датчиков задающего устройства, блок расчета углов поворота руки оператора, блок управления приводами антропоморфного манипулятора. Эта структура позволяет организовать копирующее управление антропоморфным манипулятором.
Существенными признаками прототипа, совпадающими с признаками заявляемого изобретения, являются блок механической системы задающего устройства, блок датчиков задающего устройства, блок расчета углов поворота руки оператора, блок управления приводами антропоморфного манипулятора.
Недостатком, препятствующим достижению в прототипе технического результата, обеспечиваемого изобретением, является недостаточная плавность движения антропоморфного манипулятора при копирующем управлении с помощью экзоскелета с предельно возможными скоростями и ускорениями приводов антропоморфного манипулятора. Данный недостаток обусловлен тем, что сигнал управления с задающего устройства в виде экзоскелета является дискретным и поступает в режиме реального времени. За счет дискретности сигнала управления и инерции манипулятора возникают проблемы перерегулирования, приводящие к нежелательным вибрациям антропоморфного манипулятора при движении вдоль заданной траектории, что в свою очередь ведет к повышению износа его деталей.
Техническим результатом изобретения является повышение плавности движения антропоморфного манипулятора за счет управления приводами антропоморфного манипулятора на основе прогнозного уравнения его движения, что приведет к уменьшению интенсивности нежелательных вибраций при движении манипулятора и увеличению срока службы его деталей.
Технический результат достигается тем, что в комплекс управления антропоморфным манипулятором, содержащий блок механической системы задающего устройства, блок датчиков задающего устройства, блок расчета углов поворота руки оператора, блок управления приводами антропоморфного манипулятора, в котором выходы блока механической системы задающего устройства соединены со входами блока датчиков задающего устройства, выходы которого соединены со входами блока расчета углов поворота руки оператора, введены блок памяти, блок формирования уравнений движения антропоморфного манипулятора и блок датчиков приводов антропоморфного манипулятора, при этом выходы блока расчета углов поворота руки оператора соединены со входами блока памяти, выходы которого соединены с первыми входами блока формирования уравнений движения антропоморфного манипулятора, выходы которого соединены со входами блока управления приводами антропоморфного манипулятора, выходы блока датчиков приводов антропоморфного манипулятора соединены со вторыми входами блока формирования уравнений движения антропоморфного манипулятора, на выходе блока датчиков приводов антропоморфного манипулятора формируются значения результатов измерения положения  , скорости
, скорости  и ускорения
и ускорения  антропоморфного манипулятора по каждой обобщенной координате
антропоморфного манипулятора по каждой обобщенной координате  ,
,  - количество обобщенных координат антропоморфного манипулятора, по которым осуществляется управление, в блок памяти записываются результаты расчета углов поворота, именуемых далее обобщенными координатами, руки оператора с присвоением временных меток:
- количество обобщенных координат антропоморфного манипулятора, по которым осуществляется управление, в блок памяти записываются результаты расчета углов поворота, именуемых далее обобщенными координатами, руки оператора с присвоением временных меток:
 (1)
(1)
где  -
-  -я запись в блоке памяти,
-я запись в блоке памяти,
 - вектор обобщенных координат руки оператора в -й записи,
- вектор обобщенных координат руки оператора в -й записи,
 - метка времени -й записи,
- метка времени -й записи,
- номер записи,
 - количество записей в блоке памяти,
- количество записей в блоке памяти,
на выходах блока памяти формируется значение длительности интервала прогнозирования  , значение ширины временного окна
, значение ширины временного окна  , массив результатов расчета углов поворота руки оператора с временными метками
, массив результатов расчета углов поворота руки оператора с временными метками  , в блоке формирования уравнений движения антропоморфного манипулятора вычисляются значения показателя Херста
, в блоке формирования уравнений движения антропоморфного манипулятора вычисляются значения показателя Херста  для каждой
для каждой  -й обобщенной координаты в массиве
-й обобщенной координаты в массиве  , измеряется текущий момент времени
, измеряется текущий момент времени  , формируется подмассив
, формируется подмассив  из массива , вычисляется показатель Херста
из массива , вычисляется показатель Херста  для каждой -й обобщенной координаты в подмассиве
для каждой -й обобщенной координаты в подмассиве  , для каждой -й обобщенной координаты вычисляется прогнозное значение
, для каждой -й обобщенной координаты вычисляется прогнозное значение  для момента времени
для момента времени  по формуле:
по формуле:
 (2)
(2)
где  - первый элемент в подмассиве для -й обобщенной координаты,
- первый элемент в подмассиве для -й обобщенной координаты,
 - последний элемент в подмассиве для -й обобщенной координаты,
- последний элемент в подмассиве для -й обобщенной координаты,
для каждой -й обобщенной координаты рассчитываются коэффициенты  ,
,  ,
,  ,
,  сплайна, описывающего прогнозное уравнение движения
сплайна, описывающего прогнозное уравнение движения  , по формулам:
, по формулам:
 (3)
(3)
на выходе блока формирования уравнений движения антропоморфного манипулятора формируются уравнения движения антропоморфного манипулятора в виде массива коэффициентов  сплайнов, описывающих уравнения движения антропоморфного манипулятора по обобщенным координатам, блок управления приводами антропоморфного манипулятора осуществляет управление приводами антропоморфного манипулятора в соответствии с заданными уравнениями движения.
сплайнов, описывающих уравнения движения антропоморфного манипулятора по обобщенным координатам, блок управления приводами антропоморфного манипулятора осуществляет управление приводами антропоморфного манипулятора в соответствии с заданными уравнениями движения.
Теоретическое доказательство наличия причинно-следственной связи между заявляемыми признаками и достигаемым техническим результатом заключается в следующем.
Типовая система копирующего управления включает в себя два основных элемента - задающее устройство и исполнительное устройство. Исполнительное устройство выполняет движение, задаваемое оператором с помощью задающего устройства. В данном изобретении в качестве задающего устройства предполагается использование измерительного экзоскелета. Измерительный экзоскелет надевается на руку оператора системы копирующего управления и выполняет регистрацию движения руки оператора по обобщенным координатам. В качестве исполнительного устройства в данном изобретении предполагается использование антропоморфного манипулятора.
Важной особенностью систем копирующего управления является то, что задающее устройство формирует уравнения движения в режиме реального времени, т. е. они являются заранее неизвестными. Для движения исполнительного устройства согласно заданным уравнениям движения могут использоваться следящие системы, как это предполагается в прототипе. Однако при таком способе возникает запаздывание между движением исполнительного и задающего устройства, нежелательные вибрации при движении на больших скоростях, а также повышенный износ оборудования [Е.И. Юревич «Управление роботами и робототехническими системами». - СПб: СПбГТУ, 2000. - 171 с. - с.61-65]. Таким образом, прототип не обеспечивает заявленного технического результата.
Плавное движение манипулятора на больших скоростях может быть реализовано при динамическом управлении на основе расчёта необходимых усилий в приводах антропоморфного манипулятора. Для расчета усилий в приводах антропоморфного манипулятора необходимо знать заранее уравнения движения манипулятора. Для решения данной проблемы предлагается в известный комплекс управления антропоморфным манипулятором ввести дополнительно блок памяти, блок формирования уравнений движения антропоморфного манипулятора и блок датчиков приводов антропоморфного манипулятора. Данное сочетание отличительных признаков позволит на основе известных данных о движении руки оператора выполнить прогнозирование её движения на некоторый интервал времени и использовать полученные уравнения движения для расчета усилий, которые необходимо развить в приводах антропоморфного манипулятора для плавного движения.
Рассмотрим уравнение движения руки оператора по произвольной обобщенной координате  . Приведенные далее выкладки могут быть распространены на любое количество обобщенных координат, измеряемых задающим устройством. Пусть с помощью задающего устройства получены результаты измерения движения руки оператора по рассматриваемой обобщенной координате до некоторого момента времени . Результаты измерения
. Приведенные далее выкладки могут быть распространены на любое количество обобщенных координат, измеряемых задающим устройством. Пусть с помощью задающего устройства получены результаты измерения движения руки оператора по рассматриваемой обобщенной координате до некоторого момента времени . Результаты измерения  представляют собой временной ряд измеренных задающим устройством значений положения руки оператора по координате ,
представляют собой временной ряд измеренных задающим устройством значений положения руки оператора по координате ,  - результат измерения в момент ,
- результат измерения в момент ,  - номер измерения, - количество измерений. Для рассматриваемой системы копирующего управления в качестве момента времени принимается текущий момент времени. Согласно предлагаемому способу в момент рассчитывается прогнозное значение
- номер измерения, - количество измерений. Для рассматриваемой системы копирующего управления в качестве момента времени принимается текущий момент времени. Согласно предлагаемому способу в момент рассчитывается прогнозное значение  положения руки оператора по рассматриваемой обобщенной координате через интервал прогнозирования . За основу для прогнозирования принимается известное уравнение движения руки оператора на интервале
положения руки оператора по рассматриваемой обобщенной координате через интервал прогнозирования . За основу для прогнозирования принимается известное уравнение движения руки оператора на интервале  , где - ширина временного окна, в пределах которого рассматривается уравнение движения руки оператора. Таким образом, прогнозирование осуществляется на основе временного ряда
, где - ширина временного окна, в пределах которого рассматривается уравнение движения руки оператора. Таким образом, прогнозирование осуществляется на основе временного ряда  . Для прогнозирования может быть использован уточненный метод двойного сглаживания Брауна [Kopytov V.V., Petrenko V.I., Tebueva F.B., Streblianskaia N.V. An improved Brown's method applying fractal dimension to forecast the load in a computing cluster for short time series. (2016) Indian Journal of Science and Technology, 9 (19), art. no. 93909], заключающийся в том, что прогнозное значение рассчитывают по формуле:
. Для прогнозирования может быть использован уточненный метод двойного сглаживания Брауна [Kopytov V.V., Petrenko V.I., Tebueva F.B., Streblianskaia N.V. An improved Brown's method applying fractal dimension to forecast the load in a computing cluster for short time series. (2016) Indian Journal of Science and Technology, 9 (19), art. no. 93909], заключающийся в том, что прогнозное значение рассчитывают по формуле:
 (4)
(4)
где - прогнозное значение,
 - последний элемент, входящий во временное окно
- последний элемент, входящий во временное окно  ,
,
 - первый элемент, входящий во временное окно ,
- первый элемент, входящий во временное окно ,
 - значение показателя Херста [Шелухин О.И. Мультифракталы. Инфокоммуникационные приложения. - М.: Горячая линия - Телеком, 2011. - 578 с. C. 34-35], вычисленное для временного ряда ,
- значение показателя Херста [Шелухин О.И. Мультифракталы. Инфокоммуникационные приложения. - М.: Горячая линия - Телеком, 2011. - 578 с. C. 34-35], вычисленное для временного ряда ,
 - значение показателя Херста, вычисленное для всего временного ряда .
- значение показателя Херста, вычисленное для всего временного ряда .
Таким образом, может быть получено прогнозное положение, в котором должен оказаться антропоморфный манипулятор в момент времени . Однако для решения обратной задачи динамики необходимо знание уравнения движения антропоморфного манипулятора в аналитической форме. Для формирования уравнения движения из текущего положения в прогнозное предлагается использовать сплайновую интерполяцию с учетом следующих ограничений:
Для плавного движения при переходе из текущего положения в прогнозное, скорость и ускорение должны изменяться непрерывно.
В момент времени антропоморфный манипулятор должен оказаться в положении .
Соответствующее прогнозное уравнение движения может быть получено в результате решения следующей системы уравнений:
 (5)
(5)
где  - прогнозное уравнение движения;
- прогнозное уравнение движения;
 - искомые коэффициенты сплайна прогнозного уравнения движения,
- искомые коэффициенты сплайна прогнозного уравнения движения,
 ,
,  и
и  - положение, скорость и ускорение антропоморфного манипулятора по обобщенной координате в момент соответственно,
- положение, скорость и ускорение антропоморфного манипулятора по обобщенной координате в момент соответственно,
 и
и  - первая и вторая производные уравнения движения по времени соответственно.
- первая и вторая производные уравнения движения по времени соответственно.
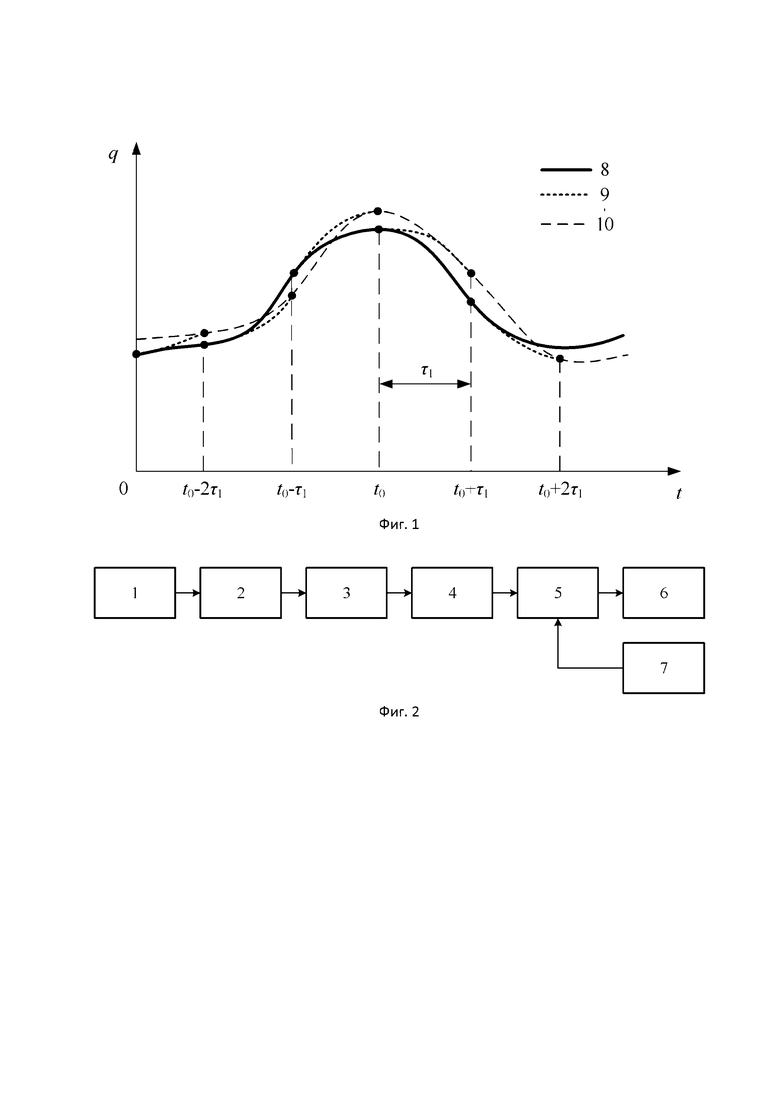
Связь между графиками уравнения движения руки оператора 8, прогнозного уравнения движения антропоморфного манипулятора 9 и уравнения реального движения антропоморфного манипулятора 10 изображена на фиг. 1.
На основе прогнозных уравнений движения, найденных для каждой обобщенной координаты антропоморфного манипулятора, может быть решена обратная задача динамики с помощью метода Лагранжа-Эйлера, Ньютона-Эйлера или другого аналогичного метода.
Предлагаемое решение обеспечивает динамическое управление антропоморфным манипулятором в системах копирующего управления, в которых уравнения движения не известны заранее, а формируются в процессе движения. Таким образом обеспечивается внедрение способа динамического управления в системы копирующего управления. В результате внедрения увеличивается плавность движения и уменьшается амплитуда нежелательных вибраций, что приводит к увеличению срока службы деталей антропоморфного манипулятора и точности копирования движений оператора.
Таким образом, осуществление расчета по приведенным формулам с одной стороны позволяет достичь заявленного технического результата, а с другой - требует применения заявленных признаков, что обусловливает причинно-следственную связь между заявляемыми признаками и достигаемым техническим результатом.
Теоретическое доказательство методов, которые легли в основу разрабатываемого устройства подробно описаны в [Петренко В.И., Тебуева Ф.Б., Гурчинский М.М., Антонов В.О., Павлов А.С. Прогнозная оценка траектории руки оператора для решения обратной задачи динамики при копирующем управлении// Труды СПИИРАН. - Выпуск 18(1), 2019. - С. 123-147. https://doi.org/10.15622/sp.18.1.123-147].
Комплекс динамического управления антропоморфным манипулятором (фиг. 2) содержит блок механической системы задающего устройства 1, блок датчиков задающего устройств 2, блок расчета углов поворота руки оператора 3, блок памяти 4, блок формирования уравнений движения антропоморфного манипулятора 5, блок управления приводами антропоморфного манипулятора 6 и блок датчиков приводов антропоморфного манипулятора 7.
Выходы блока механической системы задающего устройства 1 соединены со входами блока датчиков задающего устройства 2, выходы которого соединены со входами блока расчета углов поворота руки оператора 3, выходы которого соединены со входами блока памяти 4, выходы которого соединены с первыми входами блока формирования уравнений движения антропоморфного манипулятора 5, выходы которого соединены со входами блока управления приводами антропоморфного манипулятора 6, выходы блока датчиков приводов антропоморфного манипулятора 7 соединены со вторыми входами блока формирования уравнений движения антропоморфного манипулятора 5.
Принцип работы комплекса динамического управления антропоморфным манипулятором заключается в следующем.
Рука оператора приводит в движение блок механической системы задающего устройства 1. Положение блока механической системы задающего устройства 1 в пространстве обобщенных координат определяется блоком датчиков задающего устройства 2 и на его выходе формируется вектор обобщенных координат задающего устройства  , размерностью семь, равной количеству основных степеней подвижности руки оператора, - номер измерения, - общее количество измерений. Блок расчета углов поворота руки оператора 3 на основе входного вектора обобщенных координат задающего устройства
, размерностью семь, равной количеству основных степеней подвижности руки оператора, - номер измерения, - общее количество измерений. Блок расчета углов поворота руки оператора 3 на основе входного вектора обобщенных координат задающего устройства  и хранящихся внутри блока параметров задающего устройства и руки оператора выполняет расчет углов поворота руки оператора , именуемых далее обобщенными координатами руки оператора. Рассчитанные значения обобщенных координат руки оператора подаются на вход блока памяти 4.
и хранящихся внутри блока параметров задающего устройства и руки оператора выполняет расчет углов поворота руки оператора , именуемых далее обобщенными координатами руки оператора. Рассчитанные значения обобщенных координат руки оператора подаются на вход блока памяти 4.
В блоке памяти 4 записываются результаты расчета обобщенных координат руки оператора с присвоением временных меток:
(6)
где - -я запись в блоке памяти,
- вектор обобщенных координат руки оператора в -й записи,
- метка времени -й записи,
- номер записи,
- количество записей в блоке памяти.
На выходах блока памяти 4 формируется значение длительности интервала прогнозирования , значение ширины временного окна , массив результатов расчета обобщенных координат руки оператора с временными метками  , где - номер измерения; - общее количество измерений.
, где - номер измерения; - общее количество измерений.
Блок датчиков приводов антропоморфного манипулятора 7 измеряет и формирует на выходе векторы текущих значений координат  , скоростей
, скоростей  и ускорений
и ускорений  антропоморфного манипулятора в пространстве обобщенных координат.
антропоморфного манипулятора в пространстве обобщенных координат.
Блок формирования уравнений движения антропоморфного манипулятора 5 вычисляет значение показателя Херста для каждой -й обобщенной координаты в массиве . Затем определяет текущий момент времени и формирует из массива подмассив . Далее вычисляется показатель Херста для каждой обобщенной координаты в подмассиве . Для каждой -й обобщенной координаты вычисляется прогнозное значение для момента времени по формуле:
для каждой -й обобщенной координаты в массиве . Затем определяет текущий момент времени и формирует из массива подмассив . Далее вычисляется показатель Херста для каждой обобщенной координаты в подмассиве . Для каждой -й обобщенной координаты вычисляется прогнозное значение для момента времени по формуле:
 (7)
(7)
где - первый элемент в подмассиве для -й обобщенной координаты,
- последний элемент в подмассиве для -й обобщенной координаты.
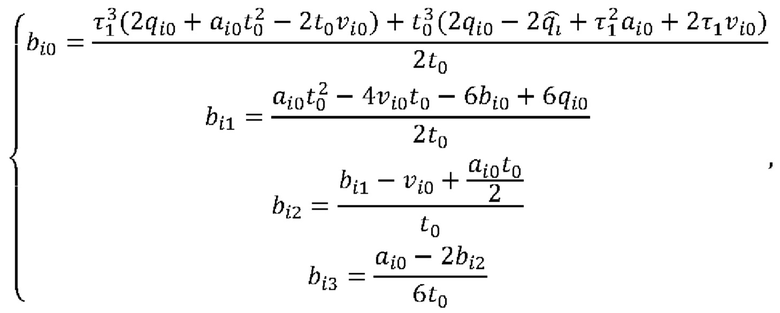
Для каждой -й обобщенной координаты рассчитываются коэффициенты , , , сплайна, описывающего прогнозное уравнений движения , по формулам
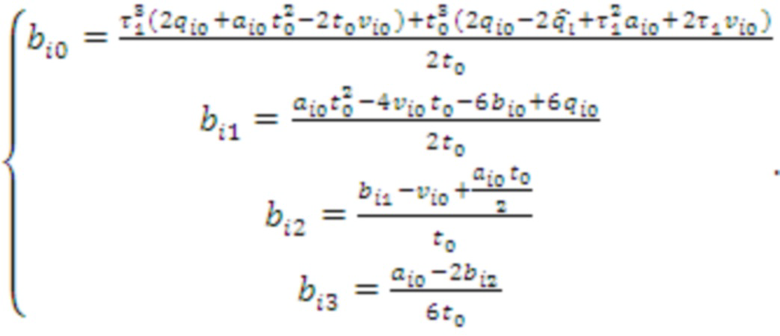 (8)
(8)
на выходе блока формирования уравнений движения антропоморфного манипулятора 5 формируются уравнения движения антропоморфного манипулятора в виде массива коэффициентов сплайнов, описывающих уравнения движения антропоморфного манипулятора по обобщенным координатам.
Блок управления приводами антропоморфного манипулятора 6 осуществляет управление приводами антропоморфного манипулятора в соответствии с заданными массивом  уравнениями движения.
уравнениями движения.
Таким образом, реализуемый заявляемым комплексом процесс управления антропоморфным манипулятором заключается в следующем:
Оператор приводит в движение механическую систему задающего устройства.
С помощью блока датчиков задающего устройства измеряются обобщенные координаты задающего устройства.
С помощью блока расчета углов поворота руки оператора рассчитываются обобщенные координаты руки оператора .
Обобщенные координаты руки оператора записываются в блок памяти.
На основе записанных результатов расчета обобщенных координат руки оператора и значений результатов измерения положения , скорости и ускорения антропоморфного манипулятора в пространстве обобщенных координат с периодичностью формируются прогнозные уравнения движения антропоморфного манипулятора на интервале от текущего момента времени до момента времени , описываемые массивом коэффициентов .
Блок управления приводами антропоморфного манипулятора осуществляет управление приводами на основе массива коэффициентов , описывающих уравнения движения антропоморфного манипулятора в пространстве обобщенных координат.
Заявляемое изобретение, как и прототип обеспечивает копирующее управление антропоморфным манипулятором. Однако, в отличие от прототипа, заявляемое изобретение позволяет осуществлять более плавное движение антропоморфного манипулятора и возможность устойчивой работы с предельно возможными скоростями и ускорениями приводов антропоморфного манипулятора за счет иного способа формирования законов управления для приводов антропоморфного манипулятора на основе прогнозных уравнений его движения. Повышение плавности движения манипулятора уменьшает износ его деталей и увеличивает срок их службы.
Предлагаемое изобретение промышленно применимо. В качестве блока механической системы задающего устройства 1 и блока датчиков задающего устройства 2 могут использоваться существующие средства задающих устройств, реализованных в виде экзоскелета (например, дистанционный манипулятор, защищенный патентом RU №125508, кл. B25J 3/04, 2011 г.). В качестве блока управления приводами антропоморфного манипулятора 6 и блока датчиков приводов антропоморфного манипулятора 7 могут использоваться существующие блоки управления антропоморфными манипуляторами. В качестве блока расчета углов поворота руки оператора 3, блока памяти 4 и блока формирования уравнений движения антропоморфного манипулятора 5 может использоваться специализированная ЭВМ или вычислительные системы задающего или исполнительного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС КОПИРУЮЩЕГО УПРАВЛЕНИЯ МАНИПУЛЯТОРАМИ АНТРОПОМОРФНОГО РОБОТА | 2019 |
|
RU2725930C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ МАНИПУЛЯТОРОМ | 2018 |
|
RU2710290C1 |
| СПОСОБ КОПИРУЮЩЕГО УПРАВЛЕНИЯ МАНИПУЛЯТОРАМИ АНТРОПОМОРФНОГО РОБОТА | 2019 |
|
RU2724769C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ МНОГОСТЕПЕННОГО МАНИПУЛЯТОРА | 2021 |
|
RU2771456C1 |
| Способ принудительной угловой ориентации головы и таза человека-оператора в механизме подвеса, применяемого для дистанционного управления антропоморфным роботом | 2019 |
|
RU2743952C2 |
| Экзоскелет для дистанционного управления в копирующем режиме антропоморфным роботом | 2021 |
|
RU2832192C2 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| СПОСОБ ПОЗИЦИОННО-СИЛОВОГО УПРАВЛЕНИЯ АВТОНОМНЫМ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ С МНОГОСТЕПЕННЫМ МАНИПУЛЯТОРОМ | 2023 |
|
RU2827123C2 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОСТЕПЕННЫМ МАНИПУЛЯТОРОМ | 2021 |
|
RU2775693C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АЭРОБАЛЛИСТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННОЙ ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ | 2013 |
|
RU2571567C2 |
Изобретение относится к робототехнике и может быть использовано в системах копирующего управления антропоморфными манипуляторами. Комплекс для управления движением антропоморфного манипулятора содержит блок механической системы задающего устройства, блок датчиков задающего устройства, блок расчета углов поворота руки оператора, блок управления приводами антропоморфного манипулятора, блок памяти, блок формирования уравнений движения антропоморфного манипулятора и блок датчиков приводов антропоморфного манипулятора. Техническим результатом изобретения является повышение плавности движения антропоморфного манипулятора за счет управления приводами антропоморфного манипулятора на основе прогнозных уравнений его движения, что обеспечивает уменьшение интенсивности нежелательных вибраций при движении манипулятора и увеличение срока службы его деталей. 2 ил.
Комплекс для управления движением антропоморфного манипулятора, содержащий блок механической системы задающего устройства, блок датчиков задающего устройства, блок расчета углов поворота руки оператора, блок управления приводами антропоморфного манипулятора, в котором выходы блока механической системы задающего устройства соединены со входами блока датчиков задающего устройства, выходы которого соединены со входами блока расчета углов поворота руки оператора, введены блок памяти, блок формирования уравнений движения антропоморфного манипулятора и блок датчиков приводов антропоморфного манипулятора, при этом выходы блока расчета углов поворота руки оператора соединены со входами блока памяти, выходы которого соединены с первыми входами блока формирования уравнений движения антропоморфного манипулятора, выходы которого соединены со входами блока управления приводами антропоморфного манипулятора, выходы блока датчиков приводов антропоморфного манипулятора соединены со вторыми входами блока формирования уравнений движения антропоморфного манипулятора, на выходе блока датчиков приводов антропоморфного манипулятора формируются значения результатов измерения положения q0i, скорости  и ускорения a0i антропоморфного манипулятора по каждой обобщенной координате
и ускорения a0i антропоморфного манипулятора по каждой обобщенной координате  n - количество обобщенных координат антропоморфного манипулятора, по которым осуществляется управление, в блок памяти записываются результаты расчета углов поворота в виде обобщенных координат руки оператора с присвоением временных меток:
n - количество обобщенных координат антропоморфного манипулятора, по которым осуществляется управление, в блок памяти записываются результаты расчета углов поворота в виде обобщенных координат руки оператора с присвоением временных меток:
Qj=<qj, tj>, 
где Qj - j-я запись в блоке памяти,
qj - вектор обобщенных координат руки оператора в j-й записи,
tj - метка времени j-й записи,
j - номер записи,
m - количество записей в блоке памяти,
на выходах блока памяти формируется значение длительности интервала прогнозирования τ1, значение ширины временного окна τ2, массив результатов расчета углов поворота руки оператора с временными метками  в блоке формирования уравнений движения антропоморфного манипулятора вычисляются значения показателя Херста
в блоке формирования уравнений движения антропоморфного манипулятора вычисляются значения показателя Херста  для каждой i-й обобщенной координаты в массиве Q, измеряется текущий момент времени t0, формируется подмассив Q*={Qj|tj∈[t0-τ2;t0]} из массива Q, вычисляется показатель Херста
для каждой i-й обобщенной координаты в массиве Q, измеряется текущий момент времени t0, формируется подмассив Q*={Qj|tj∈[t0-τ2;t0]} из массива Q, вычисляется показатель Херста  для каждой i-й обобщенной координаты в подмассиве Q*, для каждой i-й обобщенной координаты вычисляется прогнозное значение
для каждой i-й обобщенной координаты в подмассиве Q*, для каждой i-й обобщенной координаты вычисляется прогнозное значение  для момента времени t0+τ1 по формуле:
для момента времени t0+τ1 по формуле:

где qsi - первый элемент в подмассиве Q* для i-й обобщенной координаты,
qƒi - последний элемент в подмассиве Q* для i-й обобщенной координаты,
для каждой i-й обобщенной координаты рассчитываются коэффициенты bi3, bi2, bi1, bi0 сплайна, описывающего прогнозное уравнение движения qi(t)=bi3t3+bi2t2+bi1t1+bi0t0, по формулам:
на выходе блока формирования уравнений движения антропоморфного манипулятора формируются уравнения движения антропоморфного манипулятора в виде массива коэффициентов  сплайнов, описывающих уравнения движения антропоморфного манипулятора по
сплайнов, описывающих уравнения движения антропоморфного манипулятора по  обобщенным координатам, блок управления приводами антропоморфного манипулятора осуществляет управление приводами антропоморфного манипулятора в соответствии с заданными уравнениями движения.
обобщенным координатам, блок управления приводами антропоморфного манипулятора осуществляет управление приводами антропоморфного манипулятора в соответствии с заданными уравнениями движения.
| Устройство для пропитки металлокерамических, графитовых и тому подобных изделий расплавленным металлом | 1959 |
|
SU125508A1 |
| Тарировочное устройство к торсиометрам | 1961 |
|
SU146552A1 |
| US 4986280 A1, 22.01.1991 | |||
| ЮРЕВИЧ Е.И | |||
| Управление роботами и робототехническими системами | |||
| - СПб: СПбГТУ, 2000 | |||
| Аппарат для передачи изображений на расстояние | 1920 |
|
SU171A1 |
| - с | |||
| Устройство для разметки подлежащих сортированию и резанию лесных материалов | 1922 |
|
SU123A1 |

