Изобретение относится к области вооружения и военной техники (ВВТ), а более конкретно, к защите объектов наземного вооружения и военной технике от беспилотных летательных аппаратов (БПЛА) постановкой преднамеренных радиопомех спутниковой системе глобального позиционирования NAVSTAR (GPS NAVSTAR).
Стационарные наземные объекты ВВТ и инфраструктуры обладают высокой степенью уязвимости по отношению к БПЛА, точность наведения которых обеспечивается за счет оснащения датчиками спутниковых систем глобального позиционирования (ССГП). Примерами таких БПЛА являются серия «DJI», «Switchblade», и другие [1-2]. Именно датчиками ССГП обеспечивается на заключительном этапе полета высокая точность поражения ими цели. Наведение БПЛА на цель в мировой системе координат WGS-84 основано на принципе «беззапросного» приема сигналов от специализированных космических аппаратов. Для устойчивой работы СГП NAVSTAR достаточно 24 рабочих спутников с орбитальным периодом в 12 часов, размещенных на высоте примерно 20200 км от поверхности Земли по 4 на 6-и различных орбитальных плоскостях, имеющих наклон к экватору в 55°. С целью повышения надежности системы в настоящее время число спутников доведено до 32 [3]. Основа ССГП NAVSTAR - измерение точных координат на поверхности Земли по замерам расстояний от группы спутников, положение которых в пространстве известно. Каждый спутник GPS NAVSTAR излучает два радиосигнала на частотах L1=1575,42 МГц и L2=1227,60 МГц. Эти сигналы представляют собой последовательность повторяющихся кодированных посылок. Реализуются два кода: С/А код -более грубый незашифрованный код общего пользования и Р-код -зашифрованный код, используемый МО США. Сигнал L2 используется только для работы с Р-кодом. Каждый спутник имеет свой набор кодов. Псевдослучайные последовательности радиоимпульсов повторяются через 1 мс. В новой модификации IIF к ним добавляется излучение на частоте L5=1176,45 МГц.
Основа работы любой ССГП - измерение точных координат на поверхности Земли по замерам расстояний от группы спутников, положение которых в пространстве известно. По времени прохождения сигналов от спутника до приемника GPS блок позиционирования определяет расстояние от БПЛА до трех спутников.
Для этого после разделения сигнала по частотным каналам определяют по каждому спутнику корреляционным методом, сравнивая спутниковой сигнал с кодовыми последовательностями, записанными в память датчика, временной сдвиг между спутниковой кодовой посылкой и кодом в памяти датчика. Для синхронизации всего процесса замера и расчета производится обработка сигнала от четвертого спутника. После проведения цикла последовательных измерений вычислитель по временным сдвигам между кодовыми посылками трех спутников и кодом, записанным в датчике, решает систему уравнений и строит три сферы с радиусом, соответствующим расстоянию до каждого из трех выбранных спутников. Пересечение этих сфер дает возможность определить две точки возможного нахождения объекта, после чего одна из них (ложная) отбрасывается.
С 90-х годов началось оснащение ракетных систем инерциалыю- навигационного наведения, в которых основным режимом является определение положения по показаниям датчика позиционирования, а вспомогательным, в случае нарушения этого процесса, наведение бортовым блоком инерциальной навигации.
Например, в ракете М31 MLRS для этой цели в состав блока управления введены датчик позиционирования на основе процессора Motorola МРС8260 с 24х- канальным GPS-приемником "NavStrike" фирмы "BAE Systems" и инерциальная навигационная система фирмы (ИНС) "Honeywell" HG1700 на основе трех лазерных гироскопов и трех вибрационных акселерометров [4-6]. В полете боеприпасы этого типа стабилизируются и ориентируются сигналами с ИНС, а датчики ССГП через заданный интервал времени корректируют их направление полета. При регистрации контрольным блоком нарушения устойчивой работы датчика ССГП на заданное время (1,5-2 с) датчик ССГП отключается и дальнейшее наведение боеприпаса обеспечивает ИНС.Аналогичными датчиками ССГП оснащаются и БПЛА.
Во время второй Иракской войны США пришлось столкнуться со спуфингом ("spoofing") - встречным помеховым воздействием, нарушающим процесс наведения высокоточных БП путем воздействия на работу датчика позиционирования GPS [1, 7-9].
Существуют предпосылки такого помехового воздействия для защиты от БПЛА [10]. Во-первых, это априорное знание рабочих частотных диапазонов и структуры спутниковых посылок, во-вторых, малая мощность (10-15-10-16 Вт) принимаемых со спутников сигналов. Известно, и то, что излучение спутников имеет правую круговую поляризацию [11].
Известность получила помеховая станция московской фирмы «Авиаконверсия». В 1997 году она была продемонстрирована на Международном авиасалоне в Жуковском [1]. При массе в 6 кг станция обеспечивала подавление систем GPS и ГЛОНАСС в зоне радиусом 40 км. Боевую проверку образцы помеховой станции фирмы «Авиаконверсия» прошли в 2003 году во время войны в Ираке. Они оказались эффективным средством противодействия и, по решению командования армии США, были подавлены ковровым бомбометанием. Известны случаи разброса автономных помеховых генераторов-спуферов авиацией США в Афганистане для предотвращения использования GPS талибами. Минским КБ «Радар» разработан комплекс постановки помех ССГП «Оптима-3», в состав которого входят 9 излучателей, блоки питания и единая система управления. Размещенные на местности излучатели управляются по радио и могут обеспечить перекрытие помехой зоны в 150 км. Аналогичная станция «Анклав» была представлена в 2017 году ХК «Укрспецтехника» [9].
Наиболее близким по технической сущности и достигаемому результату (прототипом) является помеховая станция, реализующая способ создания преднамеренных помех [11- 12]. Помеховая станция имеет соответствующий приемник и каналы частотной селекции спутникового сигнала по частотным диапазонам ССГП. На первом этапе станция принимает единый интегрированный сигнал, передаваемый всеми работоспособными спутниками, обслуживающими данную зону и разделяет его фильтрами по частотным диапазонам ССГП. Затем, в каждом частотном канале усиливает принятый групповой навигационный сигнал ССГП и ретранслирует эти сигналы. Предполагается, что на момент начала формирования помехового сигнала координаты источника помех не должны значительно отличаться от координат пользователей ГНСС, то есть находиться в зоне действия тех же спутников ССГП. Реально вести ретрансляцию с мощностью в несколько десятков Вт.Излучатель, установленный на достаточном возвышении, способен в зоне радиусом в десятки км обеспечить помеховый сигнал с превышением уровня помехи над спутниковым сигналом на входе датчика позиционирования GPS на 40...60 дБ при почти той же структуре и поляризации излучения и произвольном времени отсчета начала кодовых посылок [13-15]. Система наведения БПЛА при подлете в зону действия помеховой станции переходит на слежение за помехой как более мощным сигналом и начинает вырабатывать неправильную координату.
Такой способ противодействия ГСП путем ретрансляции излучения спутников, с созданием мощной имитационной помехи, получил название "Smart Countermeasure". Код и фаза несущей помеховых сигналов не синхронизированы с подлинными сигналами. Пики корреляции ложного и подлинного сигналов в общем случае не совпадают.Если мощность спуфингового сигнала значительно выше, чем у подлинного, блок идентификации датчика позиционирования ССГП может быть обманут [13]. Именно такой способ использован и в других известных помеховых станциях, упомянутых выше.
Известен также способ, используемый для спуфинга БПЛА (дронов) [14]. Его особенность в том, что в этом случае координаты БПЛА и спуфера в начальный момент атаки практически совпадают.Атака начинается с ретрансляции помеховой станцией сигналов спутников ССГП, причем сначала помеховые сигналы по всем характеристикам соответствуют спутниковым. Обеспечив микс обоих сигналов, начинают медленно повышать мощность помехового. Датчик позиционирования считает их основными и начинает следить за ним. Получив контроль, постепенно смещают помеховые сигналы по оси времени относительно спутниковых и тем самым искажают координаты, вырабатываемые датчиком ССГП БПЛА.
Недостаток прототипа обусловлен тем, что появление помеховых станций привело к разработке мер защиты датчиков ССГП [15,16]. В структуру приемного тракта датчика ССГП ввели дополнительную селекцию спутниковых сигналов, получившую в литературе название "файрволл" ("Firewall"). Такой способ защиты имеет название «инициализация». После запуска БПЛА с дальности в десятки километров от цели файрволлом производится селекция и захват истинных спутниковых сигналов, после чего в каждом спутниковом канале вводится стробирование по записанному в датчике ССГП коду принимаемого данного спутникового сигнала. Тогда, появившаяся позже и нарастающая по мере полета БПЛА к цели помеха становится неэффективна - она отфильтровывается независимо от ее мощности.
Задачей предлагаемого изобретения является повышение эффективности помехового воздействия на бортовые датчики ССГП NAVSTAR БПЛА.
Технический результат заключается в снижении вероятности выполнения боевой задачи БПЛА потенциального противника и достигается путем излучения помеховой станцией сигнала помехи, искажающего спутниковый сигнал таким образом, чтобы нарушить сам процесс его устойчивого приема датчиком ССГП. Для этого в каждом из спутниковых приемных каналов датчика ССГП обеспечивается обязательное периодическое совмещение во времени строба кода спутниковой посылки со стробом кода более мощного помехового сигнала [13]. Чтобы это реализовать помеховой станцией после приема спутникового сигнала и разделения его по частотным диапазонам ССГП NAVSTAR в каждом частотном диапазоне L1, L2, L5, сигнал на периоде повторяемости демодулируется, преобразуется в цифровую форму, методом корреляционного анализа определяется его период повторяемости, запоминается, затем трансформируется по времени (удлиняется), модулируется частотой спутникового сигнала данного канала, усиливается и, непрерывно повторяясь, излучается антенной помеховой станции в качестве помехового сигнала. Такая последовательность операций производится одновременно на всех частотах излучения ССГП NAVSTAR.
На приемной антенне помеховый сигнал накладывается на спутниковый, также состоящий из повторяющейся последовательности кодовых посылок, причем этот общий сигнал повторяется с частотой биения равной:
ωC=ω1 - ω2
где: ω1- частота повторяемости периодов спутникового сигнала
ω2 -. частота повторяемости периодов помехового сигнала,
На каждом периоде частоты биения обязательно происходит совпадение во времени по коду этих двух сигналов. При этом периодически происходит резкое изменение мощности фильтруемого сигнала и скачкообразное изменение корреляционной картины. Это явление происходит в разное время на всех частотных каналах ССГП NAVSTAR и, следовательно, во всех спутниковых каналах, причем в разное время, так как каждый спутник имеет свой код. Возникший режим неустойчивой работы служит признаком неисправности работы датчика позиционирования, ведет к его отключению и переводу БПЛА в режим наведения по ИНС, что из-за ее дрейфа резко снижает точность системы наведения.
Для эффективного действия на систему наведения БПЛА помеховое излучение должно быть на дальности не менее 3-х км от помеховой станции не менее чем на 10 дБ мощнее спутниковых сигналов. Введение такого условия обосновано тем, что для нарушения работы системы наведения БПЛА даже при его запуске с дальности в сотни километров достаточно внести критическое искажение на последнем участке его полета на дальности не менее 3-х км от защищаемого объекта, чтобы при переходе на инерциальное наведение повысить вероятность его промаха [4, 5].
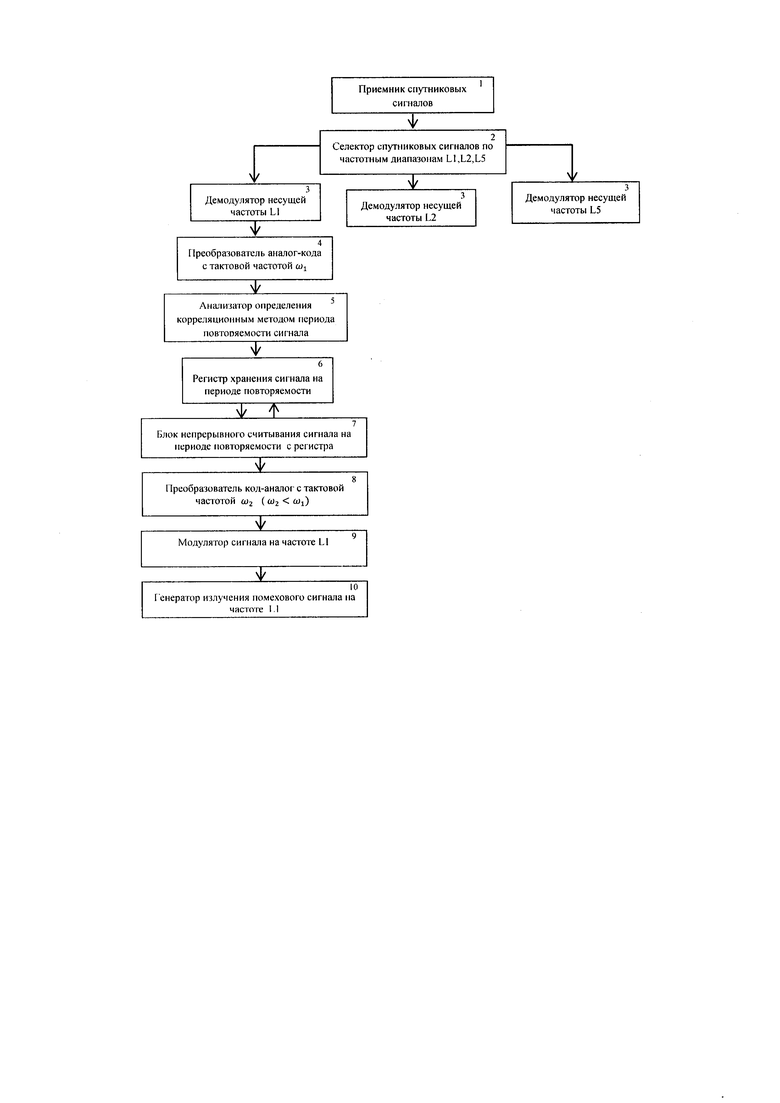
Для достижения этого результата предлагается помеховая станция, схема которой приведена на Фиг. В известную станцию постановки помех, содержащую приемник спутниковых сигналов ССГП NAVSTAR 1, селектор спутниковых сигналов по частотным диапазонам LI, L2, L5 2 и генераторы излучения помеховых сигналов на частотах LI, L2, L5 10, в каждом из этих грех частотных каналов выход селектора спутниковых сигналов 2 соответствующего частотного канала через демодулятор несущей частоты 3, преобразователь аналог-код с тактовой частотой ω1 4, анализатор определения корреляционным методом периода повторяемости сигнала 5, регистр хранения сигнала на периоде повторяемости 6, блок непрерывного считывания сигнала на периоде повторяемости с регистра повторяемости 7, преобразователь код-аналог с тактовой частотой ω2 (ω2<ω1) 8, модулятор сигнала несущей частотой L 9 соединен с соответствующим генератором излучения помеховых сигналов 10, а выход блока непрерывного считывания сигнала на периоде повторяемости 6 соединен со вторым входом регистра хранения сигнала на периоде повторяемости 5.
Достоинство предлагаемого способа создания помех в том, что он не требует знания кодов закрытых каналов ССГП NAVSTAR.
Предлагаемая помеховая станция, реализующая описанный способ, работает следующим образом. Сигнал со всех спутников ССГП NAVSTAR, обслуживающих данную зону Земли, поступают на приемник спутниковых сигналов 1 и далее на селектор 2. В каждом из трех частотных каналов отселектированный сигнал определенной частоты (LI, L2 или L5) демодулируется на демодуляторе 3 от высокочастотной несущей частоты L, затем трансформируется в кодовую последовательность на преобразователе аналог-код 4 и поступает на анализатор 5, представляющий собой вычислительный блок. На анализаторе 5 корреляционным методом определяется период повторяемости сигнала, после чего он записывается в регистр 6. По команде с блока непрерывного считывания 7 сигнал на периоде повторяемости подается в преобразователь код-аналог 8. Команды с блока считывания 7 обеспечивают непрерывность выдачи с регистра 6 последовательностей периодов повторяемости сигнала. С преобразователя 8 аналоговый сигнал поступает на модулятор 9, где модулируется несущей частотой L и генератор 10 выдает помеховый сигнал. Эффективность выдаваемой помехи определяется условием ω2<ω1. Разница тактовых частот преобразователей приводит к тому, что помеховый сигнал имеет период повторяемости более длинный по сравнению с соответствующим спутниковым сигналом. Сигналы смещаются относительно друг друга во времени с частотой биения ωC =ω1 - ω2, и несмотря на введение защитной инициализации на каждом периоде биения помеховый сигнал попадает в приемный канал датчика позиционирования боеприпаса. Если помеховый сигнал по мощности значительно превосходит спутниковый, это ведет к периодическому скачкообразному нарушению работы датчика позиционирования БПЛА, причем из-за того, что в ССГП NAVSTAR каждый спутник имеет свой код, это происходит в разное время во всех частотных и спутниковых каналах. Нарушение фиксируется и БПЛА переходит в режим наведения по ИНС, что из-за ее дрейфа снижает точность попадания.
Расчетная оценка показывает, что вероятность выполнения боевой задачи БПЛА потенциального противника при выполнении условия превышения мощности помехового сигнала над спутниковым не менее чем на 10 дб на дальности 3 км от защищаемого помеховой станцией объекта уменьшается с 0,8-0,9 до 0,2-0,3.
Источники информации
1. Борисов Е.Г., Евдокимов В. И., Андрющенко М.С., Гуменюк ГА. Высокоточное оружие и борьба с ним. - С-Пб.: Лань, 2013. - 476 с.
2. Свидетельство о государственной регистрации базы данных №2023621248 Российская Федерация. Беспилотные летательные аппараты отечественного и зарубежного производства, представляющие угрозу для объектов, охраняемых (сопровождаемых) войсками национальной гвардии Российской Федерации: №2023620959: заявл. 10.04.2023: опубл. 18.04.2023 / С.А. Сахнов, М. С.Андрющенко, А. М. Голик [и др.]; заявитель Федеральное государственное казенное военное образовательное учреждение высшего образования «Санкт-Петербургский военный ордена Жукова институт войск национальной гвардии Российской Федерации». - EDN IVLSMC.
3. Хрусталев Дмитрий. GPS - взгляд изнутри. Спутниковая навигация и принципы построения приемников GPS и ГЛОНАСС // Компоненты и Технологии. 2001. №15. URL: https://cyberleninka.ru/article/n/gps-vzglyad-iznutri-sputnikovaya-navigatsiya-i-printsipy-postroeniya-priemnikov-gps-i-glonass.
4. NZ584205A 2012-12-21 A positioning system and method integrating measurements from Global Navigation Satellite Systems (GNSS) and Inertial Navigation Systems (INS).
5. U.S. Army, FM 3-22.37 "Javelin medium antiarmor weapon system». Headquarters Department of the Army. Washington, DC, 23 January 2003. URL: https://irp.fas.org/doddir/army/fm3-22-37.pdf.
6. Bert King, Chuck Eckert, Roy Minor. The International GMLRS Development Program - A GPS/INS Application to Extend the Range and Effectiveness of the Basic Multiple Launch Rocket System (MLRS). Institute of navigation (2002).
7. Помехи в глобальных навигационных спутниковых системах. 18.01.2016. URL:https://habr.com/ru/post/389203/.
8. Antoniuk. D. How electronic warfare is reshaping the war between Russia and Ukraine. 16 august 2022. URL: https://therecord.media/how-electronic-warfare-is-reshaping-the-war-between-russia-and-ukraine/.
9. Обзор украинских средств РЭБ против БЛА. URL: https://diana-mihailova.livejournal.com/3159415.html 26.12.2018.
10. Макаренко, С.И. Противодействие беспилотным летательным аппаратам / СИ. Макаренко. - Санкт-Петербург: Издательство «Е1аукоемкие технологии», 2020. - 204 с. - ISBN 978-5-6044793-6-0. - EDN YSBRZJ.
11. RU 2016121958 A 2017-12-05. Способ создания преднамеренных помех. URL: https://patents.google.com/patent/RU2016121958A/ru.
12. RU 2543078 C1 27.02.2015 Способ и устройство создания преднамеренных помех (прототип).
13. GPS: глушилки, спуфинг и уязвимости. Neuron Hackspace. 27.08.2015. URL: https://habr.com/ru/company/neuronspace/blog/254877/.
14. Nobody's Fool. Spoofing Detection in a High-Precision Receiver. Inside GNSS, July/August 2020. URL: https://insidegnss.com/nobodys-fool-spoofing-detection-in-a-high-precision-receiver/.
15. Спуфинг больше не проблема. GPS/ГНСС. 15.12.2021. URL: https://gnssplus.ru/articles/gps-gnss-spufing-bolshe-ne-problema.html.
16. WO2016085554A3 2016-06-30 Spoofing detection and anti-jam mitigation for gps antennas.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2012 |
|
RU2495527C1 |
| Способ помехозащищенного приема сигналов систем спутниковой связи | 2020 |
|
RU2738409C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2013 |
|
RU2543078C1 |
| СПОСОБ РАДИОМАСКИРОВКИ СТАЦИОНАРНЫХ ОБЪЕКТОВ | 2012 |
|
RU2513985C1 |
| СПОСОБ И СИСТЕМА МУЛЬТИЧАСТОТНОГО ПОЗИЦИОНИРОВАНИЯ В ЭКРАНИРОВАННОМ ПРОСТРАНСТВЕ | 2013 |
|
RU2543521C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2498335C2 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ НАВИГАЦИОННОЙ СИСТЕМЫ С ПОНИЖЕННОЙ ВОСПРИИМЧИВОСТЬЮ К НЕПРЕДНАМЕРЕННЫМ И ПРЕДНАМЕРЕННЫМ ПОМЕХАМ | 2006 |
|
RU2419804C2 |
| Пространственно-распределенная система радиоподавления НАП ГНСС с функцией альтернативного координатно-временного обеспечения для санкционированных потребителей | 2017 |
|
RU2649407C1 |
| ГЕНЕРАТОР АДАПТИВНЫХ КОДОВ ДЛЯ СПУТНИКОВЫХ НАВИГАЦИОННЫХ ПРИЕМНЫХ УСТРОЙСТВ | 2007 |
|
RU2444745C2 |
Изобретение относится к области защиты объектов от беспилотных летательных аппаратов (БПЛА) постановкой преднамеренных радиопомех спутниковой системе глобального позиционирования (ССГП) NAVSTAR (GPS NAVSTAR). Техническим результатом является повышение эффективности помехового воздействия на бортовые датчики ССГП NAVSTAR БПЛА. Упомянутый технический результат достигается тем, что после регистрации сигналов спутников ССГП NAVSTAR и их частотной селекции по частотным диапазонам L1, L2, L5, в каждом из трех частотных каналов, каждому из которых соответствует свой частотный диапазон L1, L2 или L5, отселектированный сигнал частоты соответственно L1, L2 или L5 демодулируют по соответствующей каналу несущей частоте L1, L2 или L5, преобразуют в цифровую форму, определяют и записывают в регистр его период повторяемости, затем увеличивают период повторяемости сигнала по сравнению с входным спутниковым сигналом, модулируют соответствующей каналу частотой L1, L2 или L5 спутникового сигнала, усиливают и, непрерывно повторяя, излучают антенной помеховой станции в качестве помехового сигнала. 2 н.п. ф-лы, 1 ил.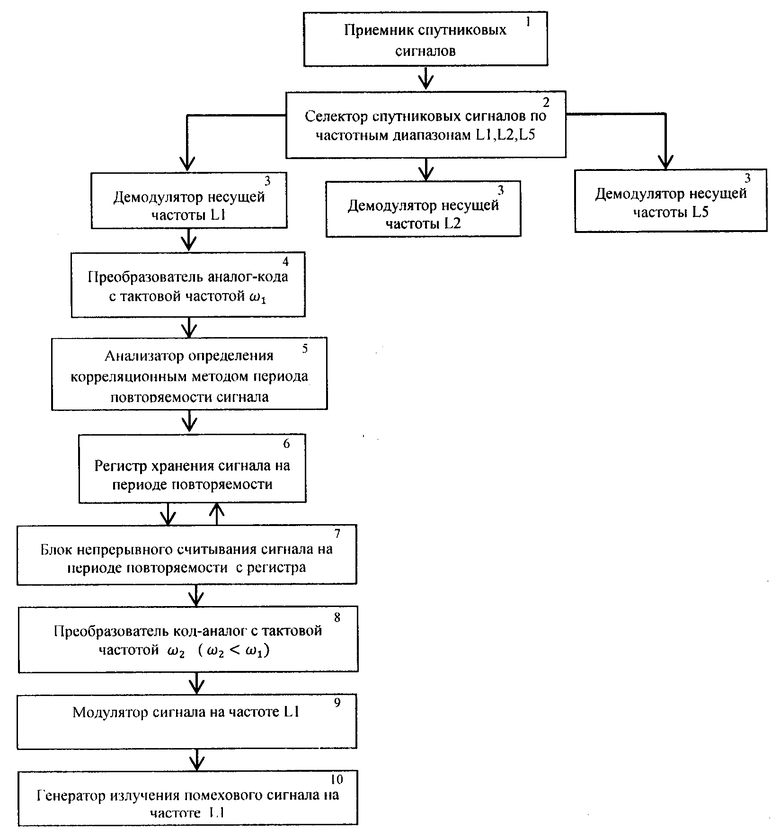
1. Способ создания преднамеренных помех датчикам спутниковой системы глобального позиционирования (ССГП) NAVSTAR путем регистрации сигналов спутников ССГП NAVSTAR, их частотной селекции по частотным диапазонам L1, L2, L5 и последующей их ретрансляции в качестве помеховых сигналов, заключающийся в том, что в каждом из трех частотных каналов, каждому из которых соответствует свой частотный диапазон L1, L2 или L5, отселектированный сигнал частоты соответственно L1, L2 или L5 демодулируют на демодуляторе по соответствующей каналу несущей частоте L1, L2 или L5, затем преобразуют в цифровую форму на преобразователе аналог-код и передают на анализатор, представляющий собой вычислительный блок, на анализаторе корреляционным методом определяется период повторяемости сигнала, после чего он записывается в регистр хранения сигнала, по команде с блока непрерывного считывания увеличивают период повторяемости сигнала по сравнению с входным спутниковым сигналом, затем сигнал подается в преобразователь код-аналог, где модулируется соответствующей каналу частотой L1, L2 или L5 спутникового сигнала, при помощи генератора усиливают и, непрерывно повторяя, излучают антенной помеховой станции в качестве помехового сигнала.
2. Помеховая станция, реализующая способ создания преднамеренных помех датчикам позиционирования ССГП NAVSTAR по п. 1, содержащая приемник спутниковых сигналов ССГП NAVSTAR, селектор спутниковых сигналов по частотным диапазонам L1, L2, L5 и генераторы излучения помеховых сигналов на частотах L1, L2, L5, причем в каждом из трех частотных каналов, каждому из которых соответствует свой частотный диапазон L1, L2 или L5, выход селектора спутниковых сигналов соответствующего частотного канала через демодулятор, соответствующий каналу несущей частоты L1, L2 или L5, преобразователь аналог-код с тактовой частотой тактовой частотой  , анализатор определения корреляционным методом периода повторяемости сигнала, регистр хранения сигнала на периоде повторяемости, блок непрерывного считывания сигнала с регистра хранения сигнала на периоде повторяемости, преобразователь код-аналог с тактовой частотой
, анализатор определения корреляционным методом периода повторяемости сигнала, регистр хранения сигнала на периоде повторяемости, блок непрерывного считывания сигнала с регистра хранения сигнала на периоде повторяемости, преобразователь код-аналог с тактовой частотой  , модулятор сигнала соответствующей несущей частотой L1, L2 или L5 соединен с генератором излучения помеховых сигналов соответствующей каналу частотой L1, L2 или L5, а выход блока непрерывного считывания сигнала на периоде повторяемости соединен со вторым входом регистра хранения сигнала на периоде повторяемости, причем
, модулятор сигнала соответствующей несущей частотой L1, L2 или L5 соединен с генератором излучения помеховых сигналов соответствующей каналу частотой L1, L2 или L5, а выход блока непрерывного считывания сигнала на периоде повторяемости соединен со вторым входом регистра хранения сигнала на периоде повторяемости, причем  <.
<.
| Андрющенко М.С | |||
| и др: "ПОИСК СПОСОБОВ ЗАЩИТЫ ОТ БОЕПРИПАСОВ, ИСПОЛЬЗУЮЩИХ В СИСТЕМЕ НАВЕДЕНИЯ ДАТЧИКИ ПОЗИЦИОНИРОВАНИЯ GPS NAVSTAR" // Актуальные проблемы защиты и безопасности: Труды XXVI Всероссийской научно-практической конференции РАРАН, 03 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2013 |
|
RU2543078C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2012 |
|
RU2495527C1 |
| СПОСОБ СОЗДАНИЯ РЕТРАНСЛИРОВАННЫХ ПОМЕХ | 2012 |
|
RU2523430C2 |

