Изобретение относится к области управления движением морских судов и предназначено для распознавания в массиве находящихся на морской акватории тех судов, между которыми возможно опасное сближение.
Одной из особенностей современного морского транспорта является коллективный характер движения, который нередко, особенно в зонах транспортных путей, примыкающих к портам, принимает форму разнонаправленных потоков с предельными значениями интенсивности и динамичности движения морских судов. Это требует в интересах обеспечения безопасности движения для принятия управленческих решений при управлении движением морских судов своевременно принимать меры к распознаванию тех морских судов, которые совершают опасные сближения, требующие управленческого вмешательства. Сближающиеся суда управляются путем изменения их курсов и скоростей таким образом, чтобы расстояние между судами не уменьшалось до недопустимо малых величин. При этом вводится понятие зоны безопасности судна, под которым понимается круг с центром в точке местоположения судна и радиусом, равным минимально допустимому расстоянию между судами. При безопасном движении не допускается вторжение в зону безопасности судна других судов.
Существующие системы управления движением судов могут распознавать опасно сближающиеся суда. Как правило, суда распознаются ими как опасно сближающиеся путем прогнозного расчета их траекторий и проверки пересечения этими траекториями зон безопасности других судов. Прогнозирование траекторий выполняется при этом на основе экстраполяции координат каждого судна на заданном временном интервале, причем движение каждого судна принимается равномерным и прямолинейным. Однако, если сближающиеся суда маневрируют (то есть их движение не является прямолинейным и равномерным), то прогнозирование траекторий судов будет в этом случае выполнено с большой ошибкой, а следовательно, понизится и достоверность заблаговременного распознавания опасного сближения судов. Поэтому распознавать маневрирующие суда, как опасно сближающиеся, следует на основе способа, в котором с целью уменьшения ошибки прогнозирования траекторий судов дополнительно оценивают вектор ускорения движения судов и экстраполируют их траектории на основе измеренных участков траекторий судов с учетом непрямолинейного характера их движения.
Таким образом, остается нерешенной задача распознавания опасного сближения двух маневрирующих судов на основе способа, в котором выбирают первое и второе судно, на основании измеренных координат каждого судна вычисляют их относительные координаты, скорость и курс, по ним определяют направления лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, сравнивают их с текущим относительным курсом первого судна и формулируют вывод о возможности опасного сближения двух судов в предположении об их прямолинейном движении; в случае вывода о безопасном сближении судов дополнительно вычисляют вектор относительного ускорения первого судна, вычисляют скорость изменения относительного курса первого судна и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, вычисляют скорость сближения относительного курса первого судна и направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна; в случае, если скорость сближения относительного курса первого судна с ближайшим из лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, положительна, то формулируют вывод о возможности опасного сближения двух маневрирующих судов.
В данном случае скорость изменения относительного курса первого судна вычисляется с учетом его относительного ускорения. Дополнительный учет ускорения судов при прогнозировании их движения позволяет заблаговременно распознавать опасно сближающиеся маневрирующие суда.
Отсутствие в существующих системах управления движением морских судов распознавания опасного сближения двух маневрирующих судов на основе способа, в котором выбирают первое и второе судно, на основании измеренных координат каждого судна вычисляют их относительные координаты, скорость и курс, по ним определяют направления лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, сравнивают их с текущим относительным курсом первого судна и формулируют вывод о возможности опасного сближения двух судов в предположении об их прямолинейном движении, в случае вывода о безопасном сближении судов дополнительно вычисляют вектор относительного ускорения первого судна, вычисляют скорость изменения относительного курса первого судна и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, вычисляют скорость сближения относительного курса первого судна и направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, и формулируют вывод о возможности опасного сближения двух маневрирующих судов в случае, если скорость сближения относительного курса первого судна с ближайшим из лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, положительна, что приводит к значительным ошибкам при прогнозировании движения маневрирующих судов, что не позволяет заблаговременно распознавать опасно сближающиеся маневрирующие суда.
Наличие в существующих системах управления движением морских судов распознавания опасного сближения двух маневрирующих судов на основе способа, в котором выбирают первое и второе судно, на основании измеренных координат каждого судна вычисляют их относительные координаты, скорость и курс, по ним определяют направления лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, сравнивают их с текущим относительным курсом первого судна и формулируют вывод о возможности опасного сближения двух судов в предположении об их прямолинейном движении, в случае вывода о безопасном сближении судов дополнительно вычисляют вектор относительного ускорения первого судна, вычисляют скорость изменения относительного курса первого судна и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, вычисляют скорость сближения относительного курса первого судна и направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, и формулируют вывод о возможности опасного сближения двух маневрирующих судов в случае, если скорость сближения относительного курса первого судна с ближайшим из лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, положительна, позволяет учесть при прогнозировании движения судов на акватории его возможный непрямолинейный характер, что, в конечном итоге, позволяет заблаговременно распознавать опасно сближающиеся маневрирующие суда.
Известен «Способ распознавания опасно сближения двух судов», описанный в патенте [1], реализующий распознавание опасно сближающихся судов путем измерения координат каждого судна, оценки по ним текущих координат, скоростей, ускорений и среднеквадратичных ошибок погрешностей оценивания ускорения каждого судна, определения точек наибольшего сближения двух судов, сравнения минимального расстояния между судами с допустимым расстоянием. Основным недостатком способа «Способ распознавания опасного сближения двух судов» является то, что ускорение судов принимается во внимание лишь при определении текущих параметров их движения, а прогнозируемое движение каждого судна принимается равномерным и прямолинейным. Следовательно, прогнозирование траекторий маневрирующих судов будет в этом случае выполнено с большой ошибкой, а следовательно, понизится и достоверность заблаговременного распознавания опасного сближения судов. В то же время данный способ не предоставляет возможность распознавания опасного сближения двух маневрирующих судов на основе способа, в котором выбирают первое и второе судно, на основании измеренных координат каждого судна вычисляют их относительные координаты, скорость и курс, по ним определяют направления лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, сравнивают их с текущим относительным курсом первого судна и формулируют вывод о возможности опасного сближения двух судов в предположении об их прямолинейном движении, в случае вывода о безопасном сближении судов дополнительно вычисляют вектор относительного ускорения первого судна, вычисляют скорость изменения относительного курса первого судна и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, вычисляют скорость сближения относительного курса первого судна и направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, и формулируют вывод о возможности опасного сближения двух маневрирующих судов в случае, если скорость сближения относительного курса первого судна с ближайшим из лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, положительна.
Следовательно, данный «Способ распознавания опасного сближения двух судов» по указанной причине не может быть использован для распознавания опасного сближения двух судов, маневрирующих не только в данный момент времени, но и при дальнейшем движении.
Известен также способ «Проверка необходимых условий столкновения двух судов», описанный в статье [2], реализующий распознавание опасного сближения двух судов путем того, что выбирают первое и второе судно, на основании измеренных координат каждого судна вычисляют их относительные координаты, скорость и курс, по ним определяют крайние значения относительных курсов первого судна, соответствующих пересечению с направлением его вектора относительной скорости зоны безопасности второго судна, сравнивают их с текущим относительным курсом первого судна и формулируют вывод о возможности опасного сближения двух судов в предположении об их прямолинейном движении. Недостатком данного способа является то, что не учитываются ускорения движения судов и, соответственно, возможность их непрямолинейного движения. Следовательно, прогнозирование траекторий маневрирующих судов будет в этом случае выполнено с большой ошибкой, а следовательно, понизится и достоверность заблаговременного распознавания опасного сближения маневрирующих судов. В то же время данный способ не предоставляет возможность распознавания опасного сближения двух маневрирующих судов на основе способа, в котором выбирают первое и второе судно, на основании измеренных координат каждого судна вычисляют их относительные координаты, скорость и курс, по ним определяют направления лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, сравнивают их с текущим относительным курсом первого судна и формулируют вывод о возможности опасного сближения двух судов в предположении об их прямолинейном движении, в случае вывода о безопасном сближении судов дополнительно вычисляют вектор относительного ускорения первого судна, вычисляют скорость изменения относительного курса первого судна и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, вычисляют скорость сближения относительного курса первого судна и направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, и формулируют вывод о возможности опасного сближения двух маневрирующих судов в случае, если скорость сближения относительного курса первого судна с ближайшим из лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, положительна.
Таким образом, известный способ «Проверка необходимых условий столкновения двух судов» по указанной причине не может быть использован для распознавания опасного сближения двух маневрирующих судов.
Известный способ «Проверка необходимых условий столкновения двух судов» по своей технической сущности, функциональному назначению и достигаемому техническому результату является наиболее близким к заявляемому изобретению на способ распознавания опасного сближения двух маневрирующих судов и рассматривается в дальнейшем в качестве способа-прототипа.
В основу изобретения положена задача создания способа распознавания опасного сближения двух маневрирующих судов, в котором выбирают первое и второе судно, на основании измеренных координат каждого судна вычисляют их относительные координаты, скорость и курс, по ним определяют направления лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, сравнивают их с текущим относительным курсом первого судна и формулируют вывод о возможности опасного сближения двух судов в предположении об их прямолинейном движении, в случае вывода о безопасном сближении судов дополнительно вычисляют вектор относительного ускорения первого судна, вычисляют скорость изменения относительного курса первого судна и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, вычисляют скорость сближения относительного курса первого судна и направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, и формулируют вывод о возможности опасного сближения двух маневрирующих судов в случае, если скорость сближения относительного курса первого судна с ближайшим из лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, положительна.
Поставленная задача решается тем, что в способ предотвращения опасного сближения двух маневрирующих судов, в котором измеряют координаты каждого судна и по ним оценивают текущие координаты и вектор скорости каждого судна, затем выбирают первое судно и вычисляют относительные координаты, относительную скорость и относительный курс первого судна, определяют направления лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, сравнивают их с текущим относительным курсом первого судна и формулируют вывод о возможности опасного сближения двух судов, дополнительно вводят оценивание вектора ускорения каждого судна, вычисление вектора относительного ускорения первого судна, вычисление скорости изменения относительного курса первого судна и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, вычисление скорости сближения относительного курса первого судна с направлениями лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, и формулировку вывода о возможности опасного сближения двух маневрирующих судов, если эта скорость сближения положительна.
В заявленном способе распознавания опасного сближения двух маневрирующих судов общими существенными признаками для него и для его способа-прототипа являются:
- измерение координат каждого судна;
- оценка текущих координат и вектора скорости каждого судна;
- выбор первого судна и вычисление относительных координат, относительной скорости и относительного курса первого судна;
- определение направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна;
- сравнение их с текущим относительным курсом первого судна и формулировка вывода о возможности опасного сближения двух судов.
Сопоставительный анализ существенных признаков заявленного способа распознавания опасного сближения двух маневрирующих судов и способа-прототипа показывает, что первый, в отличие от способа-прототипа, имеет следующие существенные отличительные признаки:
- оценивание вектора ускорения каждого судна;
- вычисление вектора относительного ускорения первого судна;
- вычисление скорости изменения относительного курса первого судна и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна;
- вычисление скорости сближения относительного курса первого судна с направлениями лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, и формулировку вывода о возможности опасного сближения двух маневрирующих судов, если эта скорость сближения положительна.
Совокупность общих существенных признаков и существенных отличительных признаков обеспечивает достижение технического результата.
Технический результат от применения заявленного способа распознавания опасного сближения двух маневрирующих судов заключается в возможности заблаговременного распознавания опасного сближения двух судов, как в случае их прямолинейного движения, так и в случае, если суда маневрируют.
Данная совокупность общих и отличительных существенных признаков достаточна и необходима для достижения заявленного технического результата.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигаемым техническим результатом, то есть благодаря данной совокупности существенных признаков изобретения стало возможным решить поставленную задачу.
Следовательно, заявленное изобретение является новым, обладает изобретательским уровнем, то есть оно явным образом не следует из уровня техники и пригодно для промышленного применения.
Сущность заявленного способа распознавания опасного сближения двух маневрирующих судов поясняется чертежами:
фиг.1 - блок-схема операций, реализующих способ распознавания опасного сближения двух маневрирующих судов;
фиг.2 - иллюстрация модельных представлений, реализующих способ распознавания опасного сближения двух маневрирующих судов;
фиг.3 - траектории движения двух судов, не сближающихся на опасное расстояние;
фиг.4 - изменение дистанции между судами для движения, изображенного на фиг.3;
фиг.5 - графики, иллюстрирующие процесс распознавания опасного сближения двух судов, движущихся по траектории, изображенной на фиг.3, на основании способа-прототипа;
фиг.6 - графики, иллюстрирующие процесс вычисления скорости изменения относительного курса первого судна и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, для судов, движущихся по траектории, изображенной на фиг.3;
фиг.7 - графики, иллюстрирующие процесс вычисления скорости сближения относительного курса первого судна и направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, для судов, движущихся по траектории, изображенной на фиг.3;
фиг.8 - траектории движения двух судов, сближающихся на опасное расстояние;
фиг.9 - изменение дистанции между судами для движения, изображенного на фиг.8;
фиг.10 - графики, иллюстрирующие процесс распознавания опасного сближения двух судов, движущихся по траектории, изображенной на фиг.8, на основании способа-прототипа;
фиг.11 - графики, иллюстрирующие процесс вычисления скорости изменения относительного курса первого судна и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, для судов, движущихся по траектории, изображенной на фиг.8;
фиг.12 - графики, иллюстрирующие процесс вычисления скорости сближения относительного курса первого судна и направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, для судов, движущихся по траектории, изображенной на фиг.8.
Заявленный способ распознавания опасного сближения двух маневрирующих судов реализуется операциями 1 и 2 измерения координат каждого судна, операциями 3 и 4 оценки текущих координат и вектора скорости каждого судна, операциями 5 и 6 оценки вектора ускорения каждого судна, операцией 7 вычисления относительных координат, относительной скорости и относительного курса первого судна, операцией 8 вычисления вектора относительного ускорения первого судна, операцией 9 определения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, операцией 10 сравнения их с текущим относительным курсом первого судна и формулировки вывода о возможности опасного сближения двух судов, операцией 11 вычисления скорости изменения относительного курса первого судна и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, операцией 12 вычисления скорости сближения относительного курса первого судна с направлениями лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, и формулировки вывода о возможности опасного сближения двух маневрирующих судов, если эта скорость сближения положительна.
Реализация заявленного способа распознавания опасного сближения двух маневрирующих судов происходит следующим образом.
Измерительным устройством (на основе радара или системы глобального позиционирования (GPS), в точные моменты времени  измеряют (операции 1 и 2, фиг.1) значения координат двух судов
измеряют (операции 1 и 2, фиг.1) значения координат двух судов 
 в неподвижной прямоугольной системе координат, связанной с поверхностью моря (
в неподвижной прямоугольной системе координат, связанной с поверхностью моря ( ,
, ,
, - измеренные координаты и время, относящиеся к судну с индексом р
- измеренные координаты и время, относящиеся к судну с индексом р  , а индекс j - порядковый номер измерения координат судна), на основании которых формируется и запоминается (для каждого судна) вектор измеренных значений координат судна, содержащий все измерения от момента времени
, а индекс j - порядковый номер измерения координат судна), на основании которых формируется и запоминается (для каждого судна) вектор измеренных значений координат судна, содержащий все измерения от момента времени  до текущего момента
до текущего момента  (знак «штрих» означает измерение, знак «Т» - транспонирование),
(знак «штрих» означает измерение, знак «Т» - транспонирование),

при этом с каждым новым измерением вектор  пополняется новыми элементами, а наиболее ранние значения измеренных координат отбрасываются, таким образом, его длина всегда остается постоянной и он всегда содержит информацию о последних N измерениях траектории.
пополняется новыми элементами, а наиболее ранние значения измеренных координат отбрасываются, таким образом, его длина всегда остается постоянной и он всегда содержит информацию о последних N измерениях траектории.
Сформированный вектор в операциях 3 и 4 (фиг.1) используется для оценки текущих (относящихся к текущему моменту времени  ) координат и вектора скорости каждого судна. Указанное оценивание производится следующим образом.
) координат и вектора скорости каждого судна. Указанное оценивание производится следующим образом.
Вводится (операция 3 и 4, фиг.1) вектор  , содержащий информацию о координатах
, содержащий информацию о координатах  и скоростях
и скоростях  судна с индексом р в момент времени в предположении о том, что движение судна является прямолинейным и равномерным (здесь
судна с индексом р в момент времени в предположении о том, что движение судна является прямолинейным и равномерным (здесь  - координаты,
- координаты,  - компоненты вектора скорости судна с индексом р в момент времени ). Между измерениями
- компоненты вектора скорости судна с индексом р в момент времени ). Между измерениями  полученными в моменты времени
полученными в моменты времени  и вектором
и вектором  для судна с индексом р в момент времени существует следующая связь:
для судна с индексом р в момент времени существует следующая связь:


где 
 - значения случайных ошибок измерений координат судов. Последняя система уравнений формируется в матричной форме:
- значения случайных ошибок измерений координат судов. Последняя система уравнений формируется в матричной форме:

где  имеет вид
имеет вид

Оценка вектора  производится методом наименьших квадратов по следующей формуле [3]:
производится методом наименьших квадратов по следующей формуле [3]:

где "Т" - символ транспонирования матрицы, «-1» - символ обращения матрицы, «∧» - символ оценки, Σ(p) - дисперсионная матрица ошибок измерений, формируемая следующим образом (предполагается, что ошибки измерений траектории, получаемые с помощью измерительного устройства, независимы и некоррелированы):
где 
 - среднеквадратичные ошибки измерений координат судов (являются известными характеристиками измерительных устройств, реализующих операции 1 и 2). Результатом работы операций 3 и 4 (фиг.1) является, таким образом, вектор
- среднеквадратичные ошибки измерений координат судов (являются известными характеристиками измерительных устройств, реализующих операции 1 и 2). Результатом работы операций 3 и 4 (фиг.1) является, таким образом, вектор  содержащий информацию о координатах
содержащий информацию о координатах 
 и скоростях
и скоростях  ,
,  судов в текущий момент времени
судов в текущий момент времени  , вычисленных в предположении о том, что движение судов является прямолинейным и равномерным. Операции 1, 2, 3 и 4 (заштрихованы на фиг.1) являются общими для способа-прототипа и заявленного способа.
, вычисленных в предположении о том, что движение судов является прямолинейным и равномерным. Операции 1, 2, 3 и 4 (заштрихованы на фиг.1) являются общими для способа-прототипа и заявленного способа.
Далее оцениваются (операции 5 и 6, фиг.1) векторы ускорения каждого судна. Это делается путем реализации последовательности операций, аналогичных операциям 3 и 4 (фиг.1). При этом вектор  содержит информацию
содержит информацию  о координатах
о координатах  , скоростях
, скоростях  и ускорениях
и ускорениях  судна с индексом р в момент времени в предположении о том, что движение судна не является прямолинейным и равномерным (здесь под
судна с индексом р в момент времени в предположении о том, что движение судна не является прямолинейным и равномерным (здесь под 
 понимаются компоненты вектора ускорения судна в неподвижной прямоугольной системе координат, связанной с поверхностью моря). Вектор в операциях 5 и 6 (фиг.1) имеет следующий вид:
понимаются компоненты вектора ускорения судна в неподвижной прямоугольной системе координат, связанной с поверхностью моря). Вектор в операциях 5 и 6 (фиг.1) имеет следующий вид:

Между измерениями  ,
,  , полученными в моменты времени
, полученными в моменты времени  и вектором для судна с индексом р в момент времени в операциях 5 и 6 (фиг.1) существует следующая связь:
и вектором для судна с индексом р в момент времени в операциях 5 и 6 (фиг.1) существует следующая связь:

Последняя система уравнений формируется в матричной форме:

причем матрица  в операциях 5 и 6 (фиг.1) имеет вид:
в операциях 5 и 6 (фиг.1) имеет вид:

Оценка вектора в операциях 5 и 6 (фиг.1) производится аналогично операциям 3 и 4 (фиг.1) методом наименьших квадратов по следующей формуле [3]:

Результатом работы операций 5 и 6 (фиг.1) являются, таким образом, векторы  , содержащие информацию, в том числе, об ускорениях
, содержащие информацию, в том числе, об ускорениях  ,
,  судов в текущий момент времени .
судов в текущий момент времени .
Далее на основе оцененных текущих координат и скоростей судов вычисляют (операция 7, фиг.1) относительные координаты первого судна 
 относительную скорость первого судна
относительную скорость первого судна  где
где 
 и относительный курс первого судна kξ в текущий момент времени (при этом предполагается, что оценка предыдущими операциями происходит так, что
и относительный курс первого судна kξ в текущий момент времени (при этом предполагается, что оценка предыдущими операциями происходит так, что  ). В данном случае kξ это угол направления вектора с компонентами (vxξ, vyξ), который может быть вычислен, например, согласно правилам:
). В данном случае kξ это угол направления вектора с компонентами (vxξ, vyξ), который может быть вычислен, например, согласно правилам:



Операция 7 (фиг.1) является общей (заштрихована на фиг.1) для способа-прототипа и заявленного способа.
Далее на основе оцененных текущих ускорений судов вычисляют (операция 8, фиг.1) компоненты вектора относительного ускорения первого судна:  ,
,  .
.
Далее на основе значений xξ, yξ, vξ, kξ определяют (операция 9, фиг.1) направления лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна. Операция 9 реализуется следующим образом.
Рассмотрим фиг.2. Здесь 13 - точка положения судна с индексом 1, 14 - точка положения судна с индексом 2; 15 - вектор с компонентами  - вектор скорости судна с индексом 1, 16 - вектор с компонентами
- вектор скорости судна с индексом 1, 16 - вектор с компонентами  - вектор скорости судна с индексом 2; 17 - вектор с компонентами (vхξ, vyξ) - вектор относительной скорости движения судна с индексом 1; 18 - вектор с компонентами (хξ, yξ) - вектор относительных координат судна с индексом 1; 19 - окружность радиуса R (здесь R - минимально допустимое безопасное расстояние между судами), с центром в точке положения судна с индексом 2, ограничивающая зону безопасности судна с индексом 2; 20 - отрезки с началом в точке положения судна с индексом 1 и концами в точке касания с окружностью 19; qξ - угол между вектором 18 и отрезком 20, характеризующий направления лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, так что
- вектор скорости судна с индексом 2; 17 - вектор с компонентами (vхξ, vyξ) - вектор относительной скорости движения судна с индексом 1; 18 - вектор с компонентами (хξ, yξ) - вектор относительных координат судна с индексом 1; 19 - окружность радиуса R (здесь R - минимально допустимое безопасное расстояние между судами), с центром в точке положения судна с индексом 2, ограничивающая зону безопасности судна с индексом 2; 20 - отрезки с началом в точке положения судна с индексом 1 и концами в точке касания с окружностью 19; qξ - угол между вектором 18 и отрезком 20, характеризующий направления лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, так что

hξ - угол между вектором 18 и вектором 17,
характеризующий текущий относительный курс судна с индексом 1, так что

Углы qξ и hξ являются результатом операции 9 (фиг.1).
Далее сравнивают (операция 10, фиг.1) направления лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна с текущим относительным курсом первого судна, и формулируют вывод о возможности опасного сближения двух судов в предположении об их прямолинейном движении.
Движение судов в текущий момент времени считается ведущим к опасному сближению в том случае, когда направление вектора 17 пересекает окружность 19, то есть hξ≤qξ; движение судов не считается ведущим к опасному сближению в том случае, когда направление вектора 17 не пересекает окружность 19 (как на фиг.2), то есть hξ>qξ. Результатом операции 10 является величина d, равная 1, если суда распознаны как опасно сближающиеся в предположении об их прямолинейном движении и 0 в противном случае.
Операции 9 и 10 (фиг.1) являются общими (заштрихованы на фиг.1) для способа-прототипа и заявленного способа.
Далее, в случае, если операцией 10 суда не распознаны как опасно сближающиеся в предположении об их прямолинейном движении (то есть d=0), то вычисляют (операция 11, фиг.1) скорости изменения относительного курса первого судна и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна.
Скорость изменения относительного курса первого судна (то есть скорость изменения угла hξ) вычисляется следующим образом [4]. Пусть axξ, ayξ - компоненты вектора относительного ускорения первого судна в текущий момент времени , а vxξ, vyξ - компоненты вектора относительной скорости первого судна в текущий момент времени . Скорость изменения угла hξ вычисляется теперь по формуле:

Скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна (то есть скорости изменения угла qξ), вычисляются следующим образом.
Пусть  - величина вектора с компонентами (xξ, yξ) - вектора относительных координат первого судна. Скорость изменения rξ равна
- величина вектора с компонентами (xξ, yξ) - вектора относительных координат первого судна. Скорость изменения rξ равна

Скорость изменения угла qξ равна

Пусть αξ - угол направления вектора относительных координат первого судна, отсчитываемый от оси y по часовой стрелке (см. фиг.2). Скорость поворота вектора относительных координат первого судна (то есть скорость изменения угла его направления αξ) равна

Таким образом, скорость изменения направления лучами 20 (фиг.2) складывается из скорости изменения угла qξ и скорости изменения угла αξ. То есть для правого по отношению к вектору относительных координат первого судна луча 20 она равна  а для левого
а для левого 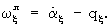 Введем величину ωξ, равную
Введем величину ωξ, равную  , если ближайший к вектору 17 (фиг.2) луч 20 - это левый луч, и равную
, если ближайший к вектору 17 (фиг.2) луч 20 - это левый луч, и равную  , если это правый луч.
, если это правый луч.
Величины  и ωξ являются результатом выполнения операции 11.
и ωξ являются результатом выполнения операции 11.
Далее вычисляются (операция 12, фиг.1) скорости сближения относительного курса первого судна с направлениями лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, и формулируется вывод о возможности опасного сближения двух маневрирующих судов, если эта скорость сближения положительна. Это делается следующим образом.
Вводится величина uξ - скорость сближения относительного курса первого судна с направлениями лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна. Величина uξ вычисляется как

Если величина uξ<0, тогда  , то есть скорость поворота ближайшего к вектору относительной скорости луча 20 меньше, чем скорость поворота вектора относительной скорости. Это означает, что движение судов носит такой характер, что их вектор относительной скорости с течением времени будет только «удаляться» от сектора, ограниченного лучами 20, и его направление не пересечет зону безопасности второго судна. Если величина uξ>0, тогда
, то есть скорость поворота ближайшего к вектору относительной скорости луча 20 меньше, чем скорость поворота вектора относительной скорости. Это означает, что движение судов носит такой характер, что их вектор относительной скорости с течением времени будет только «удаляться» от сектора, ограниченного лучами 20, и его направление не пересечет зону безопасности второго судна. Если величина uξ>0, тогда  то есть скорость поворота ближайшего к вектору относительной скорости луча 20 больше, чем скорость поворота вектора относительной скорости. Это означает, что движение судов носит такой характер, что их вектор относительной скорости с течением времени будет «приближаться» к сектору, ограниченному лучами 20, и его направление может пересечь зону безопасности второго судна.
то есть скорость поворота ближайшего к вектору относительной скорости луча 20 больше, чем скорость поворота вектора относительной скорости. Это означает, что движение судов носит такой характер, что их вектор относительной скорости с течением времени будет «приближаться» к сектору, ограниченному лучами 20, и его направление может пересечь зону безопасности второго судна.
Иными словами, если uξ<0, то делается вывод о безопасном движении судов, если uξ>0, тогда делается вывод о возможности опасного сближения двух маневрирующих судов.
Таким образом, если в некоторый момент времени по результатам операций 1, 2, 3, 4, 7, 9, 10 суда не распознаются как опасно сближающиеся, то по результатам операций 5, 6, 8, 11, 12 производится анализ параметров их маневрирования и делается вывод о возможности или невозможности опасного сближения двух маневрирующих судов.
Заявленный способ распознавания опасного сближения двух маневрирующих судов обеспечивает вычисление величин hξ, qξ, uξ и получение, соответственно, одного из результатов:
- распознавание судов как опасно сближающихся, если hξ≤qξ;
- распознавание судов как опасно сближающихся, если hξ>qξ и uξ>0;
- распознавание судов как движущихся безопасно, если hξ>qξ и uξ<0.
Во всех случаях при этом достигается распознавание опасного сближения двух судов, как движущихся прямолинейно, так и маневрирующих.
Это обуславливает у заявленного способа распознавания опасного сближения двух маневрирующих судов свойство заблаговременно распознавать опасное сближение двух судов, как в случае их прямолинейного движения, так и в случае, если суда маневрируют.
В настоящее время устройство, реализующее заявленный способ распознавания опасного сближения двух маневрирующих судов, находится в стадии численного моделирования и включает в себя:
- измерительное устройство, обеспечивающее измерение координат судов с периодом  и среднеквадратичными погрешностями
и среднеквадратичными погрешностями  ;
;
- два сближающихся судна, движущихся как по прямолинейным, так и по криволинейным траекториям.
Модель устройства, реализующего заявленный способ распознавания опасного сближения двух маневрирующих судов, имеет следующие параметры:
- минимальное безопасное расстояние между судами R=300 м;
- размерность векторов  ограничена величиной N=10.
ограничена величиной N=10.
Результаты моделирования представлены на фиг.3-12.
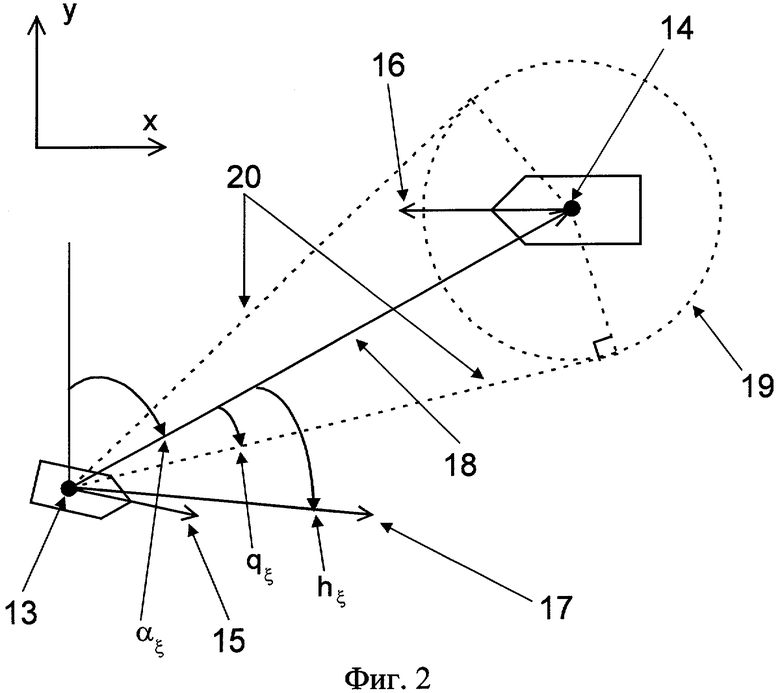
На фиг.3 показано движение судов, не сближающихся на недопустимо близкое расстояние. Скорость как одного из них - 21, так и другого - 22 равна 5 м/с. Здесь 23 - траектория судна с индексом 1, 24 - траектория судна с индексом 2. Судно 21 движется прямолинейно, судно 22 при движении совершает маневр по окружности радиуса 1000 м.
На фиг.4 представлен график изменения дистанции между судами для движения, изображенного на фиг.3. Здесь 25 - значение минимального безопасного расстояния между судами R=300 м, 26 - значение дистанции между судами с течением времени. Видно, что в результате движения суда не сближаются на недопустимо малую дистанцию.
На фиг.5 показан процесс распознавания опасного сближения судов, чье движение изображено на фиг.3, с помощью способа-прототипа. Здесь 27 - значение угла qξ, 28 - значение угла hξ. Видно, что на всем участке движения судов имеет место неравенство hξ>qξ. Это означает, что способом-прототипом движение судов распознается как безопасное.
На фиг.6 показаны графики, иллюстрирующие процесс вычисления скорости изменения относительного курса первого судна (т.е. ) и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна (т.е ωξ), для судов, движущихся по траектории, изображенной на фиг.3. Здесь 29 - значение величины , 30 - значение величины ωξ. Видно, что на всем участке движения судов имеет место неравенство , что означает распознавание движения предлагаемым способом как безопасного.
На фиг.7 показан график, иллюстрирующий процесс вычисления скорости сближения относительного курса первого судна с направлениями лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, для судов, движущихся по траектории, изображенной на фиг.3. Здесь 31 - значение величины uξ. График фиг.7 иллюстрирует результат выполнения операции 12 (фиг.1) и, фактически, дополняет графики фиг.6. Видно, что на всем участке движения судов имеет место неравенство uξ<0, что означает распознавание движения предлагаемым способом как безопасного.
Из фиг.6 и 7 видно, что для судов, не сближающихся на недопустимо близкое расстояние, с помощью предлагаемого способа движение распознается как безопасное, то есть предлагаемый способ распознавания опасного сближения двух маневрирующих судов не приводит к ложному распознаванию опасного сближения.
На фиг.8 показано движение судов, сближающихся на недопустимо близкое расстояние. Скорость как одного из них - 32, так и другого - 33 равна 5 м/с. Здесь 34 - траектория судна с индексом 1, 35 - траектория судна с индексом 2. Судно 32 движется прямолинейно, судно 33 при движении совершает маневр по окружности радиуса 1000 м.
На фиг.9 представлен график изменения дистанции между судами для движения, изображенного на фиг.8. Здесь 36 - значение минимального безопасного расстояния между судами R=300 м, 37 - значение дистанции между судами с течением времени. Видно, что в результате движения суда сближаются на недопустимо малую дистанцию в момент времени 38.
На фиг.10 показан процесс распознавания опасного сближения судов, чье движение изображено на фиг.8, с помощью способа-прототипа. Здесь 39 - значение угла qξ, 40 - значение угла hξ. Видно, что на участке движения судов после момента времени 41 имеет место неравенство hξ<qξ. Это означает, что начиная с момента времени 41 способом-прототипом движение судов распознается как опасное.
На фиг.11 показаны графики, иллюстрирующие процесс вычисления скорости изменения относительного курса первого судна (т.е. ) и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна (т.е ωξ), для судов, движущихся по траектории, изображенной на фиг.8. Здесь 42 - значение величины , 43 - значение величины ωξ. Видно, что на участке движения судов после момента времени 44 имеет место неравенство  Это означает, что начиная с момента времени 44 предлагаемым способом движение судов распознается как опасное.
Это означает, что начиная с момента времени 44 предлагаемым способом движение судов распознается как опасное.
На фиг.12 показан график, иллюстрирующий процесс вычисления скорости сближения относительного курса первого судна с направлениями лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, для судов, движущихся по траектории, изображенной на фиг.8. Здесь 45 - значение величины uξ. График фиг.12 иллюстрирует результат выполнения операции 12 (фиг.1) и, фактически, дополняет графики фиг.11. Видно, что на участке движения судов после момента времени 46 имеет место неравенство uξ>0. Это означает, что начиная с момента времени 46 (он же момент времени 44 на фиг.11) предлагаемым способом движение судов распознается как опасное.
Из фиг.10, 11 и 12 видно, что хотя способ-прототип и распознает опасное сближение судов при их маневрировании, но делает он это значительно позже, чем предлагаемый способ (момент времени 41 наступает примерно на 80 секунд позже, чем момент времени 44). Это означает, что предлагаемый способ обладает свойством заблаговременно распознавать опасное сближение двух судов, как в случае их прямолинейного движения, так и в случае, если суда маневрируют.
Из вышеизложенного следует, что реализуется поставленная заявленным способом задача распознавания опасного сближения двух маневрирующих судов, решаемая путем того, что выбирают первое и второе судно, на основании измеренных координат каждого судна вычисляют их относительные координаты, скорость и курс, по ним определяют направления лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, сравнивают их с текущим относительным курсом первого судна и формулируют вывод о возможности опасного сближения двух судов в предположении об их прямолинейном движении; в случае вывода о безопасном сближении судов дополнительно вычисляют вектор относительного ускорения первого судна, вычисляют скорость изменения относительного курса первого судна и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, вычисляют скорость сближения относительного курса первого судна и направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна; в случае, если скорость сближения относительного курса первого судна с ближайшим из лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, положительна, то формулируют вывод о возможности опасного сближения двух маневрирующих судов.
Описание способа и результаты макетирования, приведенные относительно судна с индексом 1, в равной мере могут быть отнесены и к судну с индексом 2, что, вкупе с тем, что описанная процедура реализуется в реальном масштабе времени, подтверждает достижение технического результата от применения заявленного способа распознавания опасного сближения двух маневрирующих судов.
Источники информации
1. В.Ю.Ванюков, О.С.Парфентьев, В.М.Гриняк. Способ распознавания опасного сближения двух судов. Патент №2262466 от 20 октября 2005 г., бюл. №29.
2. Р.А.Wilson, C.J.Harris and X.Hong A Line Of Sign Counteraction Navigation Algorithm For Ship Encounter Collision Avoidance // The Journal Of Navigation, 2003, Vol.56, pp.111-121 - прототип.
3. Лоусон Ч., Хенсон Р. Численное решение задач метода наименьших квадратов. М.: Наука, 1986.
4. Н.В.Бутенин, Я.Л.Лунц, Д.Р.Меркин. Курс теоретической механики. СПб.: Лань, 1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ информационного обеспечения судоводителя о надводной обстановке | 2023 |
|
RU2833310C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОПАСНОГО СБЛИЖЕНИЯ ДВУХ СУДОВ В ОГРАНИЧЕННЫХ ВОДАХ БЕЗ ИЗМЕНЕНИЯ ЛИНИИ ДВИЖЕНИЯ | 2005 |
|
RU2309082C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ОПАСНОГО СБЛИЖЕНИЯ ДВУХ СУДОВ | 2004 |
|
RU2262466C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| Способ управления поперечным и продольным движением судна относительно морского грузового терминала | 2024 |
|
RU2834495C1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| СПОСОБ ПРЕДСТАВЛЕНИЯ СУДОВОДИТЕЛЮ ОБОБЩЕННОЙ ИНФОРМАЦИИ ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2334996C2 |
| ШТУРМАНСКИЙ ПРИБОРIВсесоюзная; riR^'^-HTHo-ToxistHf _.;{ая--•^^L-_«.jii.ьиолнотека• | 1969 |
|
SU243855A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| СИСТЕМА И СПОСОБ ДЛЯ РАСПОЗНАВАНИЯ МАНЕВРОВ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА В КОНФЛИКТНЫХ СИТУАЦИЯХ | 2007 |
|
RU2461889C2 |





Изобретение предназначено для распознавания в массиве находящихся на морской акватории тех судов, между которыми возможно опасное сближение. Способ распознавания опасного сближения двух судов реализуется тем, что измеряют координаты каждого судна и по ним оценивают текущие относительные координаты, относительные скорости и относительные ускорения судов. Затем определяют направления лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, сравнивают их с текущим относительным курсом первого судна, вычисляют скорости сближения относительного курса первого судна с направлениями лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, и формулируют вывод о возможности опасного сближения двух маневрирующих судов, если эта скорость сближения положительна. Техническим результатом изобретения является заблаговременное распознавание опасного сближения двух судов как в случае их прямолинейного движения, так и в случае, если суда маневрируют. 12 ил.
Способ распознавания опасного сближения двух маневрирующих судов, в котором измеряют координаты каждого судна, и по ним оценивают текущие координаты и вектор скорости каждого судна, затем выбирают первое судно и вычисляют относительные координаты, относительную скорость и относительный курс первого судна, определяют направления лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, сравнивают их с текущим относительным курсом первого судна и формулируют вывод о возможности опасного сближения двух судов, отличающийся тем, что дополнительно вводят оценивание вектора ускорения каждого судна, вычисление вектора относительного ускорения первого судна, вычисление скорости изменения относительного курса первого судна и скорости изменения направлений лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, вычисление скорости сближения относительного курса первого судна с направлениями лучей, выходящих из точки положения первого судна и касающихся зоны безопасности второго судна, и формулировку вывода о возможности опасного сближения двух маневрирующих судов, если эта скорость сближения положительна.
| СПОСОБ РАСПОЗНАВАНИЯ ОПАСНОГО СБЛИЖЕНИЯ ДВУХ СУДОВ | 2004 |
|
RU2262466C1 |
| Вычислительная система "Антикон" для предотвращения столкновения судов | 1983 |
|
SU1136178A1 |
| US 3717873 A1, 20.02.1973. | |||

