Изобретение относится к области управления движением морских судов и предназначено для распознавания в массиве находящихся на морской акватории тех судов, между которыми возможно опасное сближение.
Одной из особенностей современного морского транспорта является коллективный характер движения, который нередко, особенно в зонах транспортных путей, примыкающих к портам, принимает форму разнонаправленных потоков с предельными значениями интенсивности и динамичности движения морских судов. Это требует в интересах обеспечения безопасности движения для принятия управленческих решений при управлении движением морских судов своевременно принимать меры к распознаванию тех морских судов, которые совершают опасные сближения, требующие управленческого вмешательства. Сближающиеся суда распознаются как создающие опасную ситуацию путем прогнозирования точек наибольшего сближения судов и сравнения расстояния между этими точками с допустимым значением.
Это делается посредством реализации способа, в котором для каждого судна выполняется оценивание текущих координат и вектора скорости, а определение точек наибольшего сближения судов выполняется на основе прогнозного расчета координат каждого судна на заданном временном интервале, при этом движение каждого судна принимается равномерным и прямолинейным. Однако если сближающиеся суда движутся ускоренно и маневрируют (то есть их движение не является прямолинейным и равномерным), то точки наибольшего сближения судов на основе такого способа будут определены с большой ошибкой. Поэтому распознавать суда, движение которых не является прямолинейным и равномерным, как создающие опасную ситуацию, следует на основе способа, в котором с целью уменьшения ошибки прогнозирования точек наибольшего сближения судов дополнительно оценивают вектор ускорения движения судов и экстраполируют их траектории на основе измеренных участков траекторий судов с учетом характера их движения. Именно такой подход реализован в заявляемом способе распознавания опасного сближения двух судов.
Существующие системы управления движением морских судов могут определять по специальным алгоритмам точки наибольшего сближения двух судов, сравнивать минимальное расстояние между судами с допустимым расстоянием и формулировать вывод о судах, как о создающих или не создающих опасную ситуацию; при этом движение судов принимается равномерным и прямолинейным. Если же движение судов не является прямолинейным и равномерным, то это приводит к нарушению оптимальных режимов алгоритмов оценивания и, соответственно, к возрастанию ошибок оценивания точек наибольшего сближения двух судов и ложным выводам относительно распознавания сближающихся судов как создающих опасную ситуацию. В результате достоверность распознавания в массиве находящихся на морской акватории тех судов, между которыми возможно опасное сближение, снижается.
Таким образом, остается нерешенной задача уменьшения ошибки прогнозирования точек наибольшего сближения двух судов на основе способа, в котором оцениваются текущие координаты, векторы скорости и ускорения каждого судна, при этом дальнейшее прогнозируемое движение каждого судна принимается равномерным и прямолинейным, а определение точек наибольшего сближения двух судов выполняется на основе вычисленных координат, векторов скорости и ускорения путем экстраполяции траектории каждого судна и прогнозного расчета координат их минимального сближения.
В данном случае сравнение расстояния между спрогнозированными указанным образом точками наибольшего сближения двух судов с допустимым значением позволяет сформулировать более достоверный вывод относительно распознавания сближающихся судов как создающих опасную ситуацию.
Отсутствие в существующих системах управления движением морских судов уменьшения ошибки прогнозирования точек наибольшего сближения двух судов на основе способа, в котором оцениваются текущие координаты, векторы скорости и ускорения каждого судна, при этом дальнейшее прогнозируемое движение каждого судна принимается равномерным и прямолинейным, а определение точек наибольшего сближения двух судов выполняется на основе вычисленных координат, векторов скорости и ускорения путем экстраполяции траектории каждого судна и прогнозного расчета координат их минимального сближения приводит к значительным ошибкам определения точек наибольшего сближения двух судов, движение которых не является прямолинейным и равномерным, и, тем самым, не позволяет достоверно распознавать сближающиеся суда как создающие опасную ситуацию (т.е. для судов, движение которых не является прямолинейным и равномерным, формулируются ложные выводы).
Уменьшение ошибки прогнозирования точек наибольшего сближения двух судов в системах управления движением морских судов на основе способа, в котором оцениваются текущие координаты, векторы скорости и ускорения каждого судна, при этом дальнейшее прогнозируемое движение каждого судна принимается равномерным и прямолинейным, а определение точек наибольшего сближения двух судов выполняется на основе вычисленных координат, векторов скорости и ускорения путем экстраполяции траектории каждого судна и прогнозного расчета координат их минимального сближения позволяет распознавать с меньшей ошибкой в массиве находящихся на морской акватории судов те суда, между которыми возможно опасное сближение, и, тем самым, увеличивает достоверность такого распознавания для судов, движение которых не является прямолинейным и равномерным.
В конечном итоге, уменьшение ошибки прогнозирования точек наибольшего сближения двух судов на основе способа, в котором оцениваются текущие координаты, векторы скорости и ускорения каждого судна, при этом дальнейшее прогнозируемое движение каждого судна принимается равномерным и прямолинейным, а определение точек наибольшего сближения двух судов выполняется на основе вычисленных координат, векторов скорости и ускорения путем экстраполяции траектории каждого судна и прогнозного расчета координат их минимального сближения, позволяет распознавать суда, между которыми возможно опасное сближение, включая те суда, движение которых не является прямолинейным и равномерным.
Известен способ распознавания судов, между которыми возможно опасное сближение, реализуемый устройством "Береговая система управления движением VOC5000" [1]. Способ основан на прогнозировании точек наибольшего сближения двух судов и сравнения расстояния между ними с задаваемой критической величиной.
Основным недостатком способа, реализованного с помощью устройства "Береговая система управления движением VOC5000" является то, что определяют точки наибольшего сближения двух судов на основе предположения только о равномерном и прямолинейном движении судов и, следовательно, осуществляют со значительными ошибками определение точек наибольшего сближения двух судов для судов, движение которых не является прямолинейным и равномерным из-за не учета влияния нелинейных составляющих движения - ускорений. По этой причине понижается достоверность распознавания судов, движение которых не является прямолинейным и равномерным, как судов, между которыми возможно опасное сближение. В то же время, данный способ не предоставляет возможность прогнозирования точек наибольшего сближения двух судов путем реализации способа, в котором оцениваются текущие координаты, векторы скорости и ускорения каждого судна, при этом дальнейшее прогнозируемое движение каждого судна принимается равномерным и прямолинейным, а определение точек наибольшего сближения двух судов выполняется на основе вычисленных координат, векторов скорости и ускорения путем экстраполяции траектории каждого судна и прогнозного расчета координат их минимального сближения.
Следовательно, данный способ, реализуемый устройством-аналогом "Береговая система управления движением VOC5000", по указанной причине не может быть использован для прогнозирования точек наибольшего сближения двух судов, движение которых не является прямолинейным и равномерным.
Известен также способ "Проверка необходимых условий столкновения двух судов", описанный в статье [2], реализующий распознавание опасного сближения двух судов и основанный на прогнозировании точек наибольшего сближения двух судов, сравнении расстояния между ними с задаваемым критическим значением и сравнении направления скорости сближения судов с направлением отрезка, проведенного между судами. Согласно данному способу исходными данными для него являются координаты и скорости движения судов, а решение о судах, как о судах, между которыми возможно опасное сближение, принимается в случае, когда выполняются три необходимых условия: расстояние между точками наибольшего сближения двух судов меньше критического значения, направление скорости сближения судов совпадает с направлением отрезка, проведенного между судами, изменение направления скорости сближения судов равно изменению направления отрезка, проведенного между судами. При этом движение судов предполагается прямолинейным и равномерным.
Если движение судов не является прямолинейным и равномерным, это приводит к нарушению режимов оценки текущих траекторий судов прототипом, так как прототип предусматривает оценку траекторий судов в предположении об их прямолинейном и равномерном движении, а на самом деле движение не является прямолинейным и равномерным. По этой причине три указанных условия недостаточны для истинной оценки распознавания судов как судов, между которыми возможно опасное сближение. При этом устройство, реализующее способ "Проверка необходимых условий столкновения двух судов", не предоставляет возможность прогнозирования точек наибольшего сближения двух судов путем реализации способа, в котором оцениваются текущие координаты, векторы скорости и ускорения каждого судна, при этом дальнейшее прогнозируемое движение каждого судна принимается равномерным и прямолинейным, а определение точек наибольшего сближения двух судов выполняется на основе вычисленных координат, векторов скорости и ускорения путем экстраполяции траектории каждого судна и прогнозного расчета координат их минимального сближения, что исключает при реализации способа-аналога достоверное прогнозирование точек наибольшего сближения двух судов для судов, движение которых не является прямолинейным и равномерным.
Таким образом, известный способ "Проверка необходимых условий столкновения двух судов" по указанной причине не может быть использован для прогнозирования точек наибольшего сближения двух судов, движение которых не является прямолинейным и равномерным.
Известный способ "Проверка необходимых условий столкновения двух судов" по своей технической сущности, функциональному назначению и достигаемому техническому результату является наиболее близким к заявляемому изобретению на способ распознавания опасного сближения двух судов и рассматривается в дальнейшем в качестве способа-прототипа.
В основу изобретения положена задача создания способа уменьшения ошибки прогнозирования точек наибольшего сближения двух судов, в котором оцениваются текущие координаты, векторы скорости и ускорения каждого судна, при этом дальнейшее прогнозируемое движение каждого судна принимается равномерным и прямолинейным, а определение точек наибольшего сближения двух судов выполняется на основе вычисленных координат, векторов скорости и ускорения путем экстраполяции траектории каждого судна и прогнозного расчета координат их минимального сближения.
Поставленная задача решается тем, что в способе распознавания опасного сближения двух судов измеряют координаты каждого судна и по ним оценивают текущие координаты и вектор скорости каждого судна, а затем определяют точки наибольшего сближения двух судов, сравнивают минимальное расстояние между судами с допустимым расстоянием и формулируют вывод о судах, как о создающих или не создающих опасную ситуацию, дополнительно вводят оценивание вектора ускорения и среднеквадратичных ошибок погрешностей оценивания ускорения каждого судна, и затем с учетом вычисляемой величины отношения абсолютных значений оценок ускорений каждого из двух судов к соответствующим среднеквадратичным погрешностям их оценивания формулируют вывод о судах, как о создающих или не создающих опасную ситуацию.
В заявленном способе распознавания опасного сближения двух судов общими существенными признаками для него и для его способа-прототипа являются
- измерение координат каждого судна;
- оценивание текущих координат и вектора скорости каждого судна;
- определение точек наибольшего сближения двух судов, сравнение минимального расстояние между судами с допустимым расстоянием и формулировка вывода о судах, как о создающих или не создающих опасную ситуацию.
Сопоставительный анализ существенных признаков заявленного способа распознавания опасного сближения двух судов и способа-прототипа показывает, что первый, в отличие от способа-прототипа, имеет следующие существенные отличительные признаки:
- оценивание вектора ускорения и среднеквадратичных ошибок погрешностей оценивания ускорений каждого судна;
- вычисление величины отношения абсолютных значений оценок ускорений каждого из двух судов к соответствующим среднеквадратичным погрешностям их оценивания;
- формулировка вывода о судах, как о создающих или не создающих опасную ситуацию с учетом этой величины.
Совокупность признаков, обеспечивающих достижение технического результата:
- измерение координат каждого судна;
- оценивание текущих координат и вектора скорости каждого судна;
- определение точек наибольшего сближения двух судов, сравнение минимального расстояние между судами с допустимым расстоянием;
- оценивание вектора ускорения и среднеквадратичных ошибок погрешностей оценивания ускорений каждого судна;
- вычисление величины отношения абсолютных значений оценок ускорений каждого из двух судов к соответствующим среднеквадратичным погрешностям их оценивания и формулировка вывода о судах, как о создающих или не создающих опасную ситуацию с учетом этой величины;
- формулировка вывода о судах, как о создающих или не создающих опасную ситуацию с учетом этой величины.
Технический результат от применения заявленного способа распознавания опасного сближения двух судов заключается в уменьшении ошибки определения точек наибольшего сближения двух судов путем дополнительного учета оцененных ускорений судов при экстраполяции положений судов, соответствующих минимальному между ними расстоянию.
Данная совокупность общих и отличительных существенных признаков достаточна и необходима для достижения заявленного технического результата.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигаемым техническим результатом, то есть благодаря данной совокупности существенных признаков изобретения стало возможным решить поставленную задачу.
Следовательно, заявленное изобретение является новым, обладает изобретательским уровнем, то есть оно явным образом не следует из уровня техники и пригодно для промышленного применения.
Сущность заявленного способа распознавания опасного сближения двух судов поясняется чертежами, где
на фиг.1 изображена блок-схема операций, реализующих способ распознавания опасного сближения двух судов;
фиг.2 - диаграммы оцененных ускорений движения двух судов и отношений оценок ускорений к их среднеквадратичным ошибкам оценивания (для прямолинейных траекторий судов);
фиг.3 - схема движения судов, иллюстрирующая результат решения задачи прогнозирования точек наибольшего сближения двух судов, удаленных от точек наибольшего сближения (для прямолинейных траекторий судов);
фиг.4 - масштабированное изображение части 15 фиг.3;
фиг.5 - схема движения судов, иллюстрирующая результат решения задачи прогнозирования точек наибольшего сближения двух судов, находящихся вблизи точек наибольшего сближения (для прямолинейных траекторий судов);
фиг.6 - масштабированное изображение части 30 фиг.5;
фиг.7 - диаграммы оцененных ускорений движения двух судов, среднеквадратичных ошибок оценивания ускорений, отношений оценок ускорений к их среднеквадратичным ошибкам оценивания (для криволинейных траекторий судов);
фиг.8 - схема движения судов, иллюстрирующая результат решения задачи прогнозирования точек наибольшего сближения двух судов, удаленных от точек наибольшего сближения (для криволинейных траекторий судов);
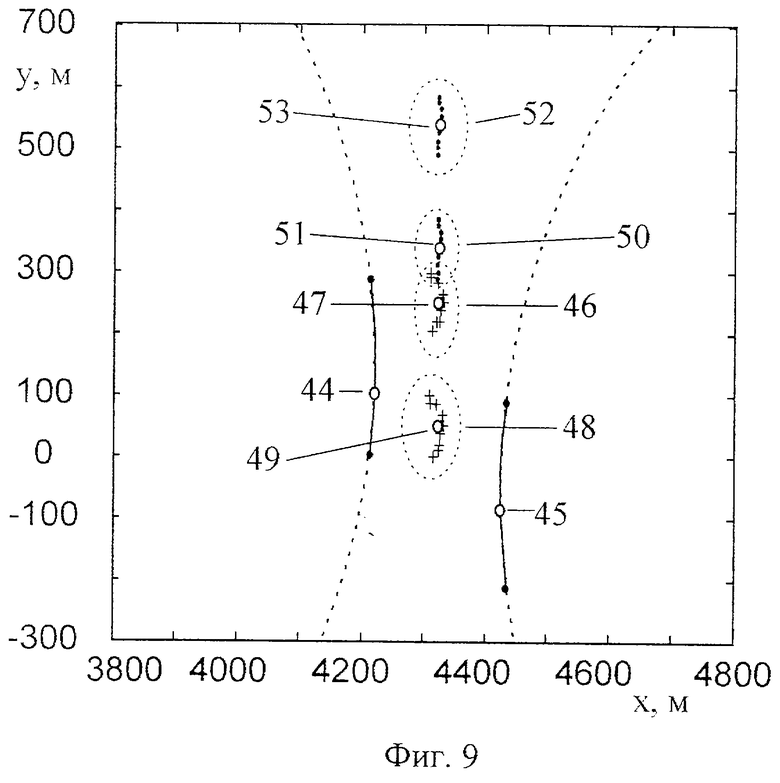
фиг.9 - масштабированное изображение части 43 фиг.8;
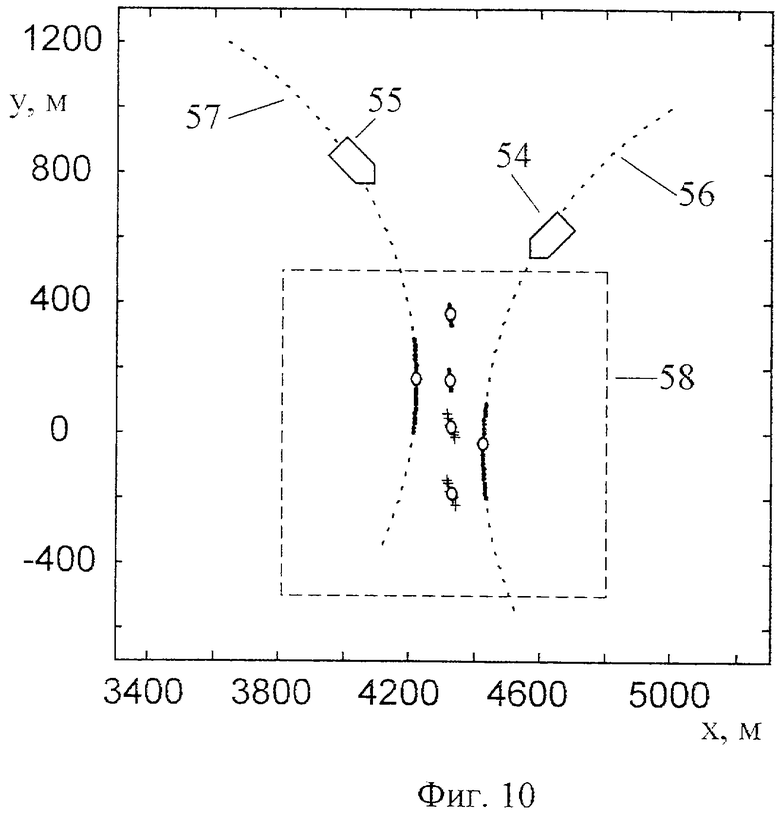
фиг.10 - схема движения судов, иллюстрирующая результат решения задачи прогнозирования точек наибольшего сближения двух судов, находящихся вблизи точек наибольшего сближения (для криволинейных траекторий судов);
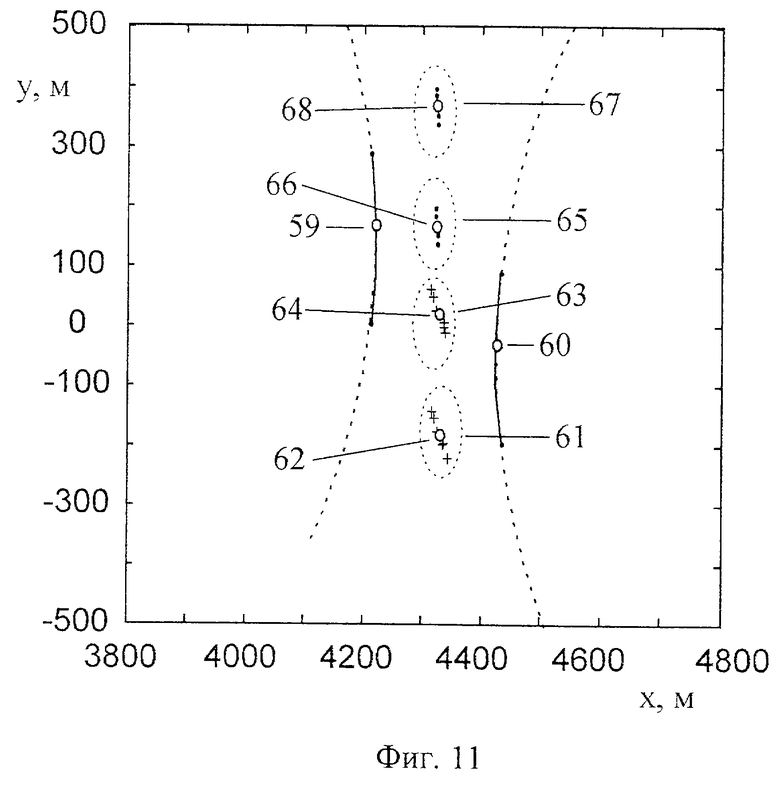
фиг.11 - масштабированное изображение части 58 фиг.10.
Заявленный способ распознавания опасного сближения двух судов реализуется следующими операциями:
- измерение координат каждого судна (операции 1 и 2, фиг.1) и последующее оценивание текущих координат и векторов скорости каждого судна (операции 3 и 4);
- оценивание векторов ускорений и среднеквадратичных ошибок погрешностей оценивания ускорений каждого из двух судов (операции 5 и 6);
- вычисление величины отношения абсолютных значений оценок ускорений каждого из двух судов к соответствующим среднеквадратичным погрешностям их оценивания (операции 7 и 8) и формулировка вывода о судах, как о тех, чье движение не является прямолинейным и равномерным, в том случае, когда отношение абсолютных значений оценок ускорений к соответствующим среднеквадратичным погрешностям оценивания ускорений больше задаваемого порога;
- выбор (операция 9) по результатам операций 7 и 8 из множества текущих координат и скоростей судов тех значений, которые соответствуют установленным свойствам движения судов, то есть тех, которые соответствуют предположению о том, что движение судов не является равномерным и прямолинейным (если суда не движутся прямолинейно и равномерно) или о равномерном прямолинейном движении (если суда движутся прямолинейно и равномерно) судов на измеренных участках траекторий;
- определение точек наибольшего сближения двух судов, сравнение минимального расстояние между судами с допустимым расстоянием (операция 10) и формулировка вывода о судах, как о создающих или не создающих опасную ситуацию.
Реализация заявленного способа распознавания опасного сближения двух судов происходит следующим образом.
Измерительным устройством (на основе радара или системы глобального позиционирования (GPS)) в точные моменты времени  измеряют (операция 1 и 2, фиг.1) значения координат двух судов
измеряют (операция 1 и 2, фиг.1) значения координат двух судов  в неподвижной прямоугольной системе координат, связанной с поверхностью моря (
в неподвижной прямоугольной системе координат, связанной с поверхностью моря ( - измеренные координаты и время, относящиеся к судну с индексом
- измеренные координаты и время, относящиеся к судну с индексом  , а индекс j - порядковый номер измерения координат судна), на основе которых прототипом [2] оценивают (операция 3 и 4, фиг.1) текущие (в момент времени
, а индекс j - порядковый номер измерения координат судна), на основе которых прототипом [2] оценивают (операция 3 и 4, фиг.1) текущие (в момент времени  ) координаты
) координаты  и скорости
и скорости  судна в предположении о равномерном и прямолинейном движении судов (здесь под
судна в предположении о равномерном и прямолинейном движении судов (здесь под  понимаются компоненты вектора скорости судна в неподвижной прямоугольной системе координат, связанной с поверхностью моря). Операции 1, 2, 3 и 4 являются общими для способа-прототипа и заявленного способа.
понимаются компоненты вектора скорости судна в неподвижной прямоугольной системе координат, связанной с поверхностью моря). Операции 1, 2, 3 и 4 являются общими для способа-прототипа и заявленного способа.
Далее формируется и запоминается (для каждого судна, операции 5 и 6) вектор измеренных значений координат судна, содержащий все измерения от момента времени  до текущего момента
до текущего момента  (знак "штрих" означает измерение),
(знак "штрих" означает измерение),

при этом с каждым новым измерением вектор  пополняется новыми элементами, а наиболее ранние значения измеренных координат отбрасываются, таким образом, его длина всегда остается постоянной и он всегда содержит информацию о последних N измерениях траектории. Сформированный вектор в операциях 5 и 6 используется для оценивания координат судна, его скоростей, ускорений и среднеквадратичных ошибок оценивания ускорений, относящихся к текущему моменту времени
пополняется новыми элементами, а наиболее ранние значения измеренных координат отбрасываются, таким образом, его длина всегда остается постоянной и он всегда содержит информацию о последних N измерениях траектории. Сформированный вектор в операциях 5 и 6 используется для оценивания координат судна, его скоростей, ускорений и среднеквадратичных ошибок оценивания ускорений, относящихся к текущему моменту времени  . Указанное оценивание производится следующим образом.
. Указанное оценивание производится следующим образом.
Вводится (операция 5 и 6, фиг.1) вектор
 , содержащий информацию о координатах
, содержащий информацию о координатах  , скоростях
, скоростях  и ускорениях
и ускорениях  судна с индексом р в момент времени
судна с индексом р в момент времени  в предположении о том, что движение судна не является прямолинейным и равномерным (здесь под
в предположении о том, что движение судна не является прямолинейным и равномерным (здесь под  понимаются компоненты вектора ускорения судна в неподвижной прямоугольной системе координат, связанной с поверхностью моря. Между измерениями
понимаются компоненты вектора ускорения судна в неподвижной прямоугольной системе координат, связанной с поверхностью моря. Между измерениями  , полученными в моменты времени
, полученными в моменты времени  и вектором
и вектором  для судна с индексом р в момент времени
для судна с индексом р в момент времени  существует следующая связь:
существует следующая связь:
где 
 - значения случайных ошибок измерений. Последняя система уравнений формируется в матричной форме
- значения случайных ошибок измерений. Последняя система уравнений формируется в матричной форме
где  имеет вид
имеет вид

Оценка вектора  производится методом наименьших квадратов по следующей формуле [3]
производится методом наименьших квадратов по следующей формуле [3]

где "Т" - символ транспонирования матрицы, "-1" - символ обращения матрицы, "˜" - символ оценки, R(p) - дисперсионная матрица ошибок измерений, формируемая следующим образом (предполагается, что ошибки измерений траектории, получаемые с помощью измерительного устройства, независимы и некоррелированы)
где  ,
,  - среднеквадратичные ошибки измерений координат судов (являются известными характеристиками измерительных устройств, реализующих операции 1 и 2). Оценка среднеквадратичных погрешностей оценивания ускорений судна
- среднеквадратичные ошибки измерений координат судов (являются известными характеристиками измерительных устройств, реализующих операции 1 и 2). Оценка среднеквадратичных погрешностей оценивания ускорений судна  производится по формуле [3]
производится по формуле [3]



где  - элемент матрицы
- элемент матрицы  , находящийся на пересечении 3 строки и 3 столбца,
, находящийся на пересечении 3 строки и 3 столбца,  - элемент матрицы
- элемент матрицы  находящийся на пересечении 6 строки и 6 столбца.
находящийся на пересечении 6 строки и 6 столбца.
Результатом работы операций 5 и 6 (фиг.1) являются, таким образом, векторы  , содержащие информацию о координатах
, содержащие информацию о координатах  скоростях
скоростях  и ускорениях
и ускорениях  судов в текущий момент времени , а также величины среднеквадратичных ошибок оценивания ускорении судов
судов в текущий момент времени , а также величины среднеквадратичных ошибок оценивания ускорении судов  , вычисленные в предположении о том, что движение судов не является прямолинейным и равномерным.
, вычисленные в предположении о том, что движение судов не является прямолинейным и равномерным.
Далее вычисляются (операция 7 и 8) абсолютные значения отношений ускорении движения судов  , к среднеквадратичным погрешностям оценивания ускорений судов
, к среднеквадратичным погрешностям оценивания ускорений судов 
и определяется величина

которая сравнивается с задаваемым порогом f*. Если  , то принимается решение о том, что движение судна с индексом р не является прямолинейным и равномерным. Введем новую величину
, то принимается решение о том, что движение судна с индексом р не является прямолинейным и равномерным. Введем новую величину  , которой присваивается значение 1, если . Если же
, которой присваивается значение 1, если . Если же  , то принимается решение о прямолинейном и равномерном движении судна с индексом р, и величине присваивается значение 0.
, то принимается решение о прямолинейном и равномерном движении судна с индексом р, и величине присваивается значение 0.
Величины используется в операции 9 при выборе из вычисленных в ходе операций 3, 4, 5 и 6 множества текущих координат и скоростей судов тех значений, которые соответствуют установленным свойствам движения судов. Операция 9 состоит в следующем. Если для судна с индексом р=1 величина  равна 0, то в качестве значений его текущих координат и скорости выбираются полученные по результатам операции 3, если у этого же судна величина равна 1, то в качестве значений его текущих координат и скорости выбираются полученные по результатам операции 5.
равна 0, то в качестве значений его текущих координат и скорости выбираются полученные по результатам операции 3, если у этого же судна величина равна 1, то в качестве значений его текущих координат и скорости выбираются полученные по результатам операции 5.
Если для судна с индексом р=2 величина  равна 0, то в качестве значений его текущих координат и скорости выбираются полученные по результатам операции 4, если у этого же судна величина равна 1, то в качестве значении его текущих координат и скорости выбираются полученные по результатам операции 6.
равна 0, то в качестве значений его текущих координат и скорости выбираются полученные по результатам операции 4, если у этого же судна величина равна 1, то в качестве значении его текущих координат и скорости выбираются полученные по результатам операции 6.
По выбранным текущим координатам производят определение (операция 10) точек наибольшего сближения двух судов, сравнение минимального расстояние между судами с допустимым расстоянием и формулировка вывода о судах, как о создающих или не создающих опасную ситуацию. Операция 10 является общей для способа-прототипа и заявленного способа.
Таким образом, если суда движутся прямолинейно и равномерно, то прогнозирование точек наибольшего сближения двух судов выполняется операциями 1, 2, 3, 4 и 10, то есть полностью соответствует способу-прототипу. Если движение судов не является прямолинейным и равномерным, то в способ-прототип дополнительно вводятся операции 5, 6, 7, 8 и 9, обеспечивающие уменьшение ошибки прогнозирования точек наибольшего сближения двух судов. Это обуславливает у заявленного способа распознавания опасного сближения двух судов свойство уменьшать ошибку прогнозирования точек наибольшего сближения двух судов в том случае, если суда не движутся прямолинейно и равномерно, путем оценивания текущих координат, векторов скорости и ускорения каждого судна, при этом дальнейшее прогнозируемое движение каждого судна принимается равномерным и прямолинейным, а определение точек наибольшего сближения двух судов выполняется на основе вычисленных координат, векторов скорости и ускорения путем экстраполяции траектории каждого судна и прогнозного расчета координат их минимального сближения.
В настоящее время способ распознавания опасного сближения двух судов находится в стадии моделирования и включает в себя
- измерительное устройство, обеспечивающее измерение координат судов с периодом  и среднеквадратичными погрешностями
и среднеквадратичными погрешностями  ;
;
- два сближающихся судна, движущихся как по прямолинейным, так и по криволинейным траекториям;
- размерность векторов  ограничена величиной N=20;
ограничена величиной N=20;
- пороговое значение f*, используемое для идентификации судов, движущихся ускоренно и маневрирующих (вычисленное как максимальное значение  результатам 1000 имитационных решений задачи определения для судна, движущегося прямолинейно и равномерно), принимается равным 5;
результатам 1000 имитационных решений задачи определения для судна, движущегося прямолинейно и равномерно), принимается равным 5;
- экстраполяция траекторий судов и прогнозирование минимального расстояния между ними выполняется в точном соответствии с алгоритмом способа-прототипа.
Результаты моделирования представлены на фиг.2-11.
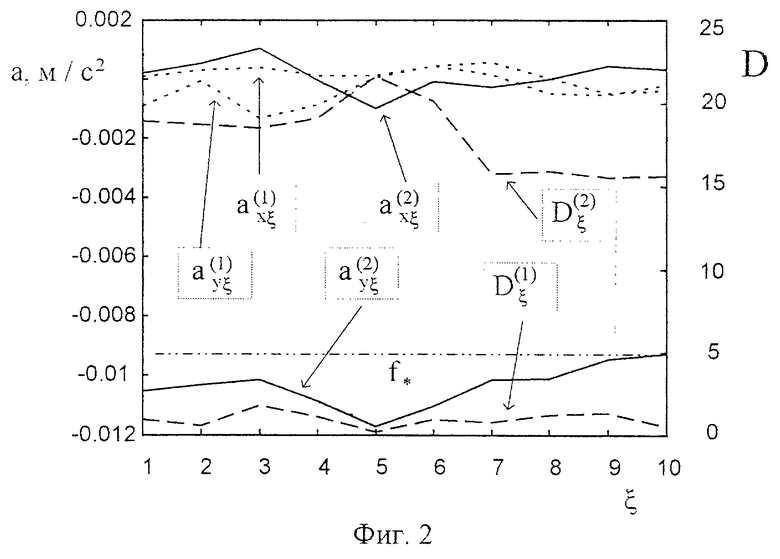
На фиг.2 представлена диаграмма оцененных ускорений движения двух судов  и отношений оценок ускорений к их среднеквадратичным ошибкам оценивания, выраженных величинами
и отношений оценок ускорений к их среднеквадратичным ошибкам оценивания, выраженных величинами  , для прямолинейных траекторий судов. Истинные значения ускорений движения судов были приняты равными
, для прямолинейных траекторий судов. Истинные значения ускорений движения судов были приняты равными  . Диаграмма показывает, что для судна с индексом 1, движущегося равномерно и прямолинейно, и для судна с индексом 2, движущегося ускоренно, значения величин уверенно различаются. Из диаграммы также следует, что пороговое значение f*=5 позволяет отличать суда, движущиеся ускоренно и маневрирующие от судов, движущихся прямолинейно и равномерно, так как для пороговых значений f*=5 судно с индексом 2 надежно распознается, как движущееся ускоренно (для него
. Диаграмма показывает, что для судна с индексом 1, движущегося равномерно и прямолинейно, и для судна с индексом 2, движущегося ускоренно, значения величин уверенно различаются. Из диаграммы также следует, что пороговое значение f*=5 позволяет отличать суда, движущиеся ускоренно и маневрирующие от судов, движущихся прямолинейно и равномерно, так как для пороговых значений f*=5 судно с индексом 2 надежно распознается, как движущееся ускоренно (для него  ), а для судна с индексом 1, движущегося прямолинейно и равномерно, решение о его ускоренном движении и маневрировании не принимается (для него
), а для судна с индексом 1, движущегося прямолинейно и равномерно, решение о его ускоренном движении и маневрировании не принимается (для него  ).
).
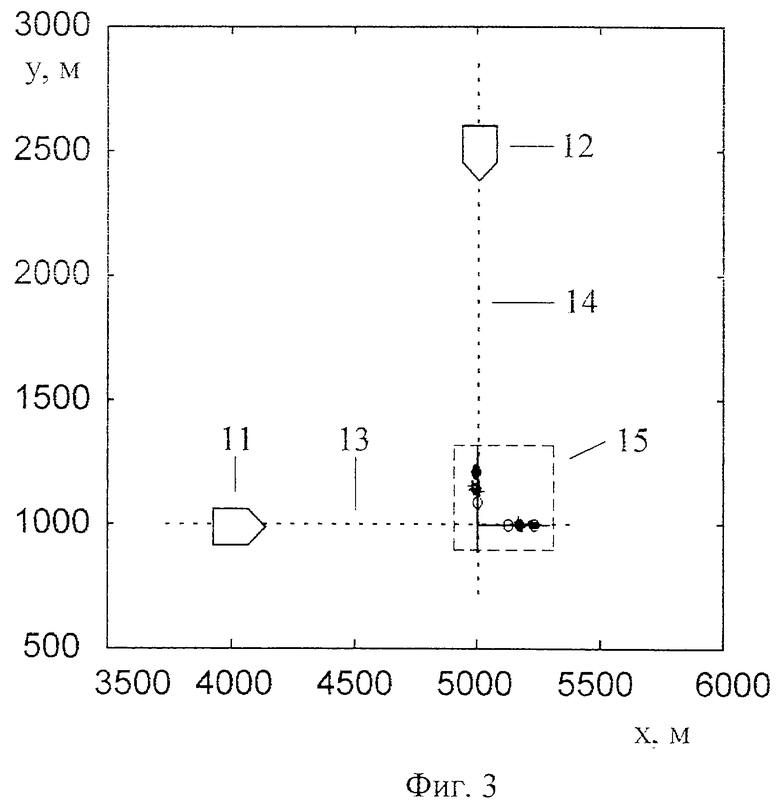
На фиг.3 представлена схема движения судов, иллюстрирующая результат решения задачи прогнозирования точек наибольшего сближения двух судов, удаленных от точек наибольшего сближения, для прямолинейных траекторий судов, одно из которых (12) движется ускоренно  . Здесь 11 - судно с индексом 1, 12 - судно с индексом 2, 13 - траектория судна с индексом 1, 14 - траектория судна с индексом 2. Сплошными линиями выделены участки траекторий 13 и 14, двигаясь по которым суда находятся в опасном сближении (расстояние между ними менее 300 м, именно такое критическое расстояние между судами принято прототипом). Масштабированное изображение зоны 15 показано на фиг.4.
. Здесь 11 - судно с индексом 1, 12 - судно с индексом 2, 13 - траектория судна с индексом 1, 14 - траектория судна с индексом 2. Сплошными линиями выделены участки траекторий 13 и 14, двигаясь по которым суда находятся в опасном сближении (расстояние между ними менее 300 м, именно такое критическое расстояние между судами принято прототипом). Масштабированное изображение зоны 15 показано на фиг.4.
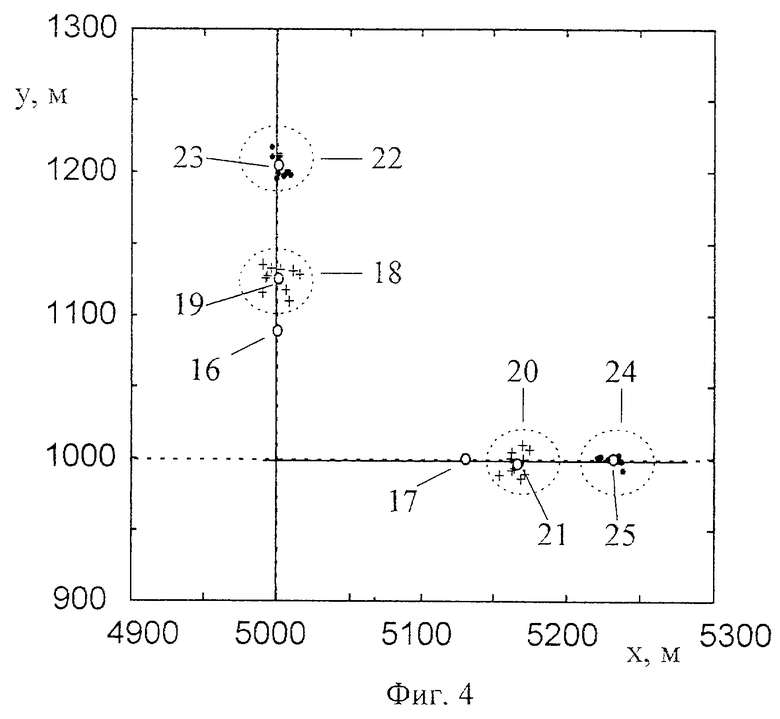
На фиг.4 представлено масштабированное изображение зоны 15. Здесь 16 - истинная точка, в которой судно с индексом 2 находится на минимальном расстоянии от судна с индексом 1,17 - истинная точка, в которой судно с индексом 1 находится на минимальном расстоянии от судна с индексом 2; 18 - группа точек, в которых судно с индексом 2 находится на минимальном расстоянии от судна с индексом 1, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием заявленного способа, 19 - средняя точка группы точек 18; 20 - группа точек, в которых судно с индексом 1 находится на минимальном расстоянии от судна с индексом 2, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием заявленного способа; 21 - средняя точка группы точек 20; 22 - группа точек, в которых судно с индексом 2 находится на минимальном расстоянии от судна с индексом 1, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием способа-прототипа, 23 - средняя точка группы точек 22; 24 - группа точек, в которых судно с индексом 1 находится на минимальном расстоянии от судна с индексом 2, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием способа-прототипа; 25 - средняя точка группы точек 24. Диаграмма фиг.4 иллюстрирует, что точки наибольшего сближения двух судов 11 и 12, одно из которых (12) движется ускоренно, спрогнозированные с помощью способа-прототипа (группы точек 22 и 24) с большой погрешностью, отличаются от истинного положения точек наибольшего сближения двух судов (точек 16 и 17). Вместе с тем, точки наибольшего сближения двух судов 11 и 12, одно из которых (12) движется ускоренно, спрогнозированные с использованием заявленного способа (группы точек 18 и 20), хотя и отличаются от истинных (точек 16 и 17), но определены с меньшей ошибкой по сравнению со способом-прототипом (так как расстояние между точками 16 и 19 меньше, чем между 16 и 23, а также расстояние между точками 17 и 21 меньше, чем между 17 и 25).
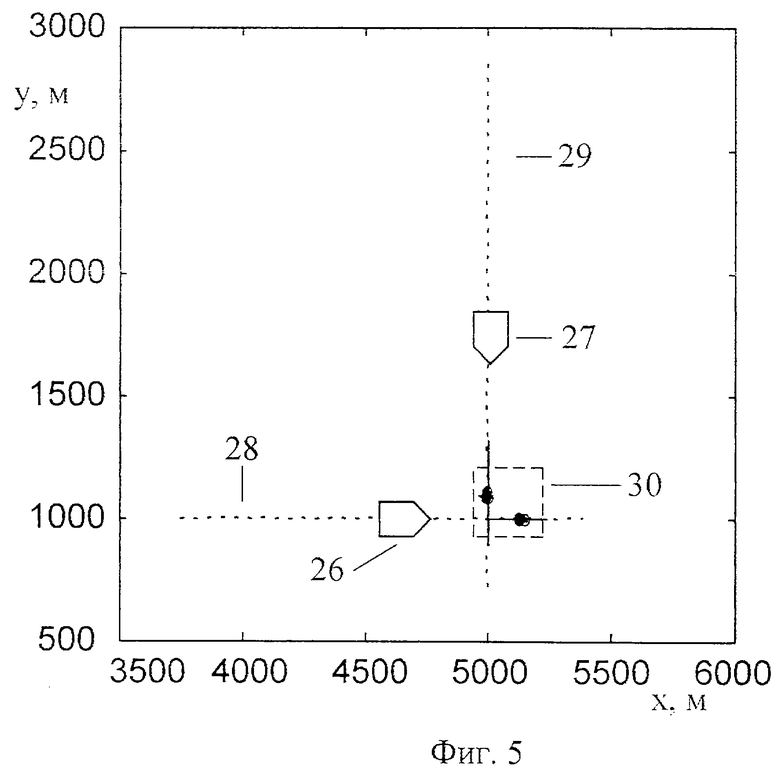
На фиг.5 представлена схема движения судов, иллюстрирующая результат решения задачи прогнозирования точек наибольшего сближения двух судов, находящихся вблизи от точек наибольшего сближения, для прямолинейных траекторий судов, одно из которых (27) движется ускоренно  . Здесь 26 - судно с индексом 1, 27 - судно с индексом 2, 28 - траектория судна с индексом 1, 29 - траектория судна с индексом 2. Сплошными линиями выделены участки траекторий 28 и 29, двигаясь по которым суда находятся в опасном сближении (расстояние между ними менее 300 м). Масштабированное изображение зоны 30 показано на фиг.6.
. Здесь 26 - судно с индексом 1, 27 - судно с индексом 2, 28 - траектория судна с индексом 1, 29 - траектория судна с индексом 2. Сплошными линиями выделены участки траекторий 28 и 29, двигаясь по которым суда находятся в опасном сближении (расстояние между ними менее 300 м). Масштабированное изображение зоны 30 показано на фиг.6.
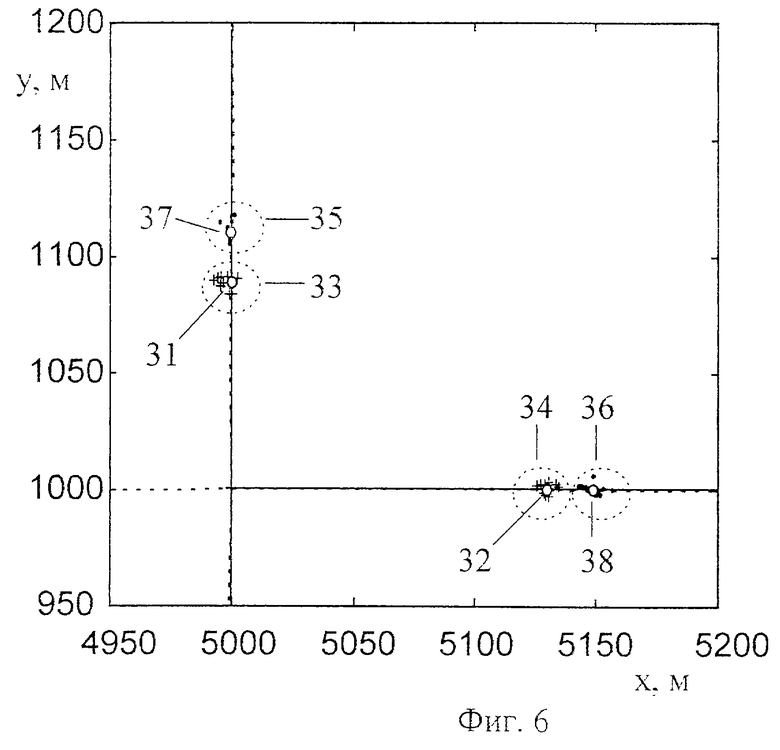
На фиг.6 представлено масштабированное изображение зоны 30. Здесь 31 - истинная точка, в которой судно с индексом 2 находится на минимальном расстоянии от судна с индексом 1; 32 - истинная точка, в которой судно с индексом 1 находится на минимальном расстоянии от судна с индексом 2; 33 - группа точек, в которых судно с индексом 2 находится на минимальном расстоянии от судна с индексом 1, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием заявленного способа, средняя точка группы точек 33 сливается (с точностью до погрешности вычислений) с точкой 31; 34 - группа точек, в которых судно с индексом 1 находится на минимальном расстоянии от судна с индексом 2, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием заявленного способа, средняя точка группы точек 34 сливается (с точностью до погрешности вычислений) с точкой 32; 35 - группа точек, в которых судно с индексом 2 находится на минимальном расстоянии от судна с индексом 1, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием способа-прототипа; 37 - средняя точка группы точек 35; 36 - группа точек, в которых судно с индексом 1 находится на минимальном расстоянии от судна с индексом 2, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием способа-прототипа; 38 - средняя точка группы точек 36. Диаграмма фиг.6 иллюстрирует, что точки наибольшего сближения двух судов 26 и 27, одно из которых (27) движется ускоренно, спрогнозированные с помощью способа-прототипа (группы точек 35 и 36) с большой погрешностью отличаются от истинного положения точек наибольшего сближения двух судов (точек 31 и 32). Вместе с тем, точки наибольшего сближения двух судов 26 и 27, одно из которых (27) движется ускоренно, спрогнозированные с использованием заявленного способа (группы точек 33 и 34), не отличаются (с точностью до погрешности вычислений) от истинных (точек 31 и 32).
На фиг.3, 4, 5 и 6 приведена иллюстрация уменьшения ошибки прогнозирования точек наибольшего сближения двух судов с помощью заявляемого способа распознавания опасного сближения двух судов в том случае, когда они движущихся прямолинейно и ускоренно.
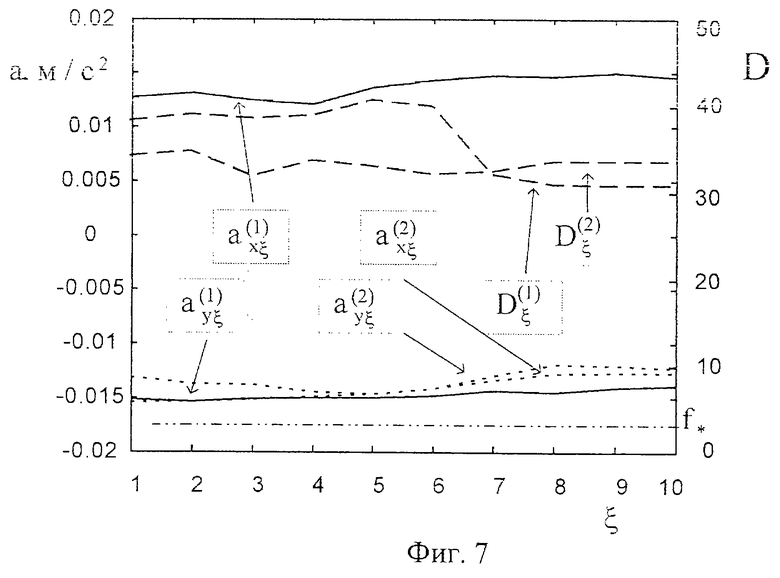
На фиг.7 представлена диаграмма оцененных ускорений движения двух судов  и отношений оценок ускорений к их среднеквадратичным ошибкам оценивания, выраженных величинами для криволинейных траекторий судов. В качестве истинных траекторий движения судов были приняты окружности радиуса 1250 м, а абсолютные скорости движения судов были приняты равными 5 м/с. Диаграмма показывает, что суда, двигающиеся по указанным криволинейным траекториям, уверенно отличаются от судов, движущихся прямолинейно и равномерно, так как для пороговых значений f*=5 суда с индексами 1 и 2 надежно распознаются как движущиеся ускоренно и маневрирующие (для них
и отношений оценок ускорений к их среднеквадратичным ошибкам оценивания, выраженных величинами для криволинейных траекторий судов. В качестве истинных траекторий движения судов были приняты окружности радиуса 1250 м, а абсолютные скорости движения судов были приняты равными 5 м/с. Диаграмма показывает, что суда, двигающиеся по указанным криволинейным траекториям, уверенно отличаются от судов, движущихся прямолинейно и равномерно, так как для пороговых значений f*=5 суда с индексами 1 и 2 надежно распознаются как движущиеся ускоренно и маневрирующие (для них  ,
,  ).
).
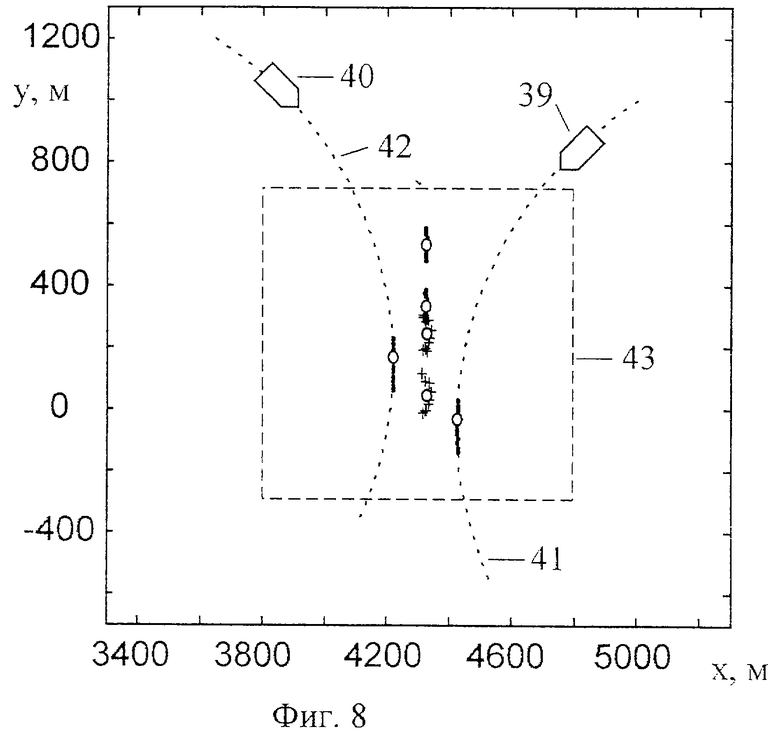
На фиг.8 представлена схема движения судов, иллюстрирующая результат решения задачи прогнозирования точек наибольшего сближения двух судов, удаленных от точек наибольшего сближения, для криволинейных траекторий судов (суда движутся по окружностям радиуса 1250 м со скоростью 5 м/с). Здесь 39 - судно с индексом 1, 40 - судно с индексом 2, 41 - траектория судна с индексом 1, 42 - траектория судна с индексом 2. Сплошными линиями выделены участки траекторий 41 и 42, двигаясь по которым суда находятся в опасном сближении (расстояние между ними менее 300 м). Масштабированное изображение зоны 43 показано на фиг.9.
На фиг.9 представлено масштабированное изображение зоны 43. Здесь 44 - истинная точка, в которой судно с индексом 2 находится на минимальном расстоянии от судна с индексом 1; 45 - истинная точка, в которой судно с индексом 1 находится на минимальном расстоянии от судна с индексом 2; 46 - группа точек, в которых судно с индексом 2 находится на минимальном расстоянии от судна с индексом 1, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием заявленного способа; 47 - средняя точка группы точек 46; 48 - группа точек, в которых судно с индексом 1 находится на минимальном расстоянии от судна с индексом 2, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием заявленного способа; 49 - средняя точка группы точек 48; 50 - группа точек, в которых судно с индексом 2 находится на минимальном расстоянии от судна с индексом 1, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием способа-прототипа; 51 - средняя точка группы точек 50; 52 - группа точек, в которых судно с индексом 1 находится на минимальном расстоянии от судна с индексом 2, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием способа-прототипа; 53 - средняя точка группы точек 50. Диаграмма фиг.4 иллюстрирует, что точки наибольшего сближения двух судов 39 и 40, движущихся по криволинейной траектории, спрогнозированные с помощью способа-прототипа (группы точек 50 и 52), с большой погрешностью отличаются от истинного положения точек наибольшего сближения двух судов (точек 44 и 45). Вместе с тем, точки наибольшего сближения двух судов 39 и 40, движущихся по криволинейной траектории, спрогнозированные с использованием заявленного способа (группы точек 46 и 48), определены с меньшей ошибкой по сравнению со способом-прототипом (так как расстояние между точками 49 и 45 меньше чем между 51 и 45, а также расстояние между точками 47 и 44 меньше чем между 53 и 44).
На фиг.10 представлена схема движения судов, иллюстрирующая результат решения задачи прогнозирования точек наибольшего сближения двух судов, находящихся вблизи от точек наибольшего сближения, для криволинейных траекторий судов (суда движутся по окружностям радиуса 1250 м со скоростью 5 м/с). Здесь 54 - судно с индексом 1; 55 - судно с индексом 2; 56 - траектория судна с индексом 1; 57 - траектория судна с индексом 2. Сплошными линиями выделены участки траекторий 56 и 57, двигаясь по которым суда находятся в опасном сближении (расстояние между ними менее 300 м). Масштабированное изображение зоны 58 показано на фиг.11.
На фиг.11 представлено масштабированное изображение зоны 58. Здесь 59 - истинная точка, в которой судно с индексом 2 находится на минимальном расстоянии от судна с индексом 1; 60 - истинная точка, в которой судно с индексом 1 находится на минимальном расстоянии от судна с индексом 2; 61 - группа точек, в которых судно с индексом 2 находится на минимальном расстоянии от судна с индексом 1, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием заявленного способа; 62 - средняя точка группы точек 61; 63 - группа точек, в которых судно с индексом 1 находится на минимальном расстоянии от судна с индексом 2, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием заявленного способа; 64 - средняя точка группы точек 63; 65 - группа точек, в которых судно с индексом 2 находится на минимальном расстоянии от судна с индексом 1, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием способа-прототипа; 66 - средняя точка группы точек 65; 67 - группа точек, в которых судно с индексом 1 находится на минимальном расстоянии от судна с индексом 2, являющихся результатом нескольких последовательных решений задачи прогнозирования точек наибольшего сближения двух судов с использованием способа-прототипа; 68 - средняя точка группы точек 67. Диаграмма фиг.11 иллюстрирует, что точки наибольшего сближения двух судов 54 и 55, движущихся по криволинейной траектории, спрогнозированные с помощью способа-прототипа (группы точек 65 и 67), отличаются от истинного положения точек наибольшего сближения двух судов (точек 59 и 60). Вместе с тем, точки наибольшего сближения двух судов 54 и 55, движущихся по криволинейной траектории, спрогнозированные с использованием заявленного способа (группы точек 61 и 63), хотя тоже отличаются от истинных (точек 59 и 60), но определены с ошибкой, адекватной способу-прототипу (так как расстояние между точками 60 и 62 приблизительно равно расстоянию между точками 60 и 66, а также расстояние между точками 59 и 64 приблизительно равно расстоянию между точками 59 и 68).
Фиг.8, 9, 10 и 11 иллюстрируют результат, что для сближающихся судов, движущихся по криволинейным траекториям, реализация заявленного способа распознавания опасного сближения двух судов приводит к уменьшению ошибки прогнозирования точек наибольшего сближения двух судов на ранних стадиях их сближения.
Из вышеизложенного следует, что заявленным способом реализуется поставленная задача уменьшения ошибки прогнозирования точек наибольшего сближения двух судов на основе оценивания текущих координат, векторов скорости и ускорения каждого судна, при этом дальнейшее прогнозируемое движение каждого судна принимается равномерным и прямолинейным, а определение точек наибольшего сближения двух судов выполняется на основе вычисленных координат, векторов скорости и ускорения путем экстраполяции траектории каждого судна и прогнозного расчета координат их минимального сближения.
Таким образом, полученные результаты свидетельствуют о достижении технического результата от применения заявленного способа распознавания опасного сближения двух судов.
Источники информации
1. VOC5000. Operation Manual. Horten. Norcontrol. 1993.
2. P.A.Wilson. C.J.Harris and X.Hong. A Line of Sign Counteraction Navigation Algorithm for Ship Encounter Collision Avoidance // The Journal of Navigation, 2003, vol.56, pp.111-121 - прототип
3. Лоусон Ч., Хенсон Р. Численное решение задач метода наименьших квадратов. М.: Наука, 1986.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ ОПАСНОГО СБЛИЖЕНИЯ ДВУХ МАНЕВРИРУЮЩИХ СУДОВ | 2005 |
|
RU2309083C1 |
| Способ информационного обеспечения судоводителя о надводной обстановке | 2023 |
|
RU2833310C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОПАСНОГО СБЛИЖЕНИЯ ДВУХ СУДОВ В ОГРАНИЧЕННЫХ ВОДАХ БЕЗ ИЗМЕНЕНИЯ ЛИНИИ ДВИЖЕНИЯ | 2005 |
|
RU2309082C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩЕГОСЯ СУДНА | 2012 |
|
RU2499278C1 |
| СПОСОБ ИНДИКАЦИИ УГРОЗ И КОМАНД ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ В ВОЗДУШНОМ ПРОСТРАНСТВЕ | 2008 |
|
RU2373116C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| ШТУРМАНСКИЙ ПРИБОРIВсесоюзная; riR^'^-HTHo-ToxistHf _.;{ая--•^^L-_«.jii.ьиолнотека• | 1969 |
|
SU243855A1 |
| СПОСОБ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325705C1 |
| Способ управления группой беспилотных летательных аппаратов с учетом степени опасности окружающих объектов | 2019 |
|
RU2728197C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ИСТОЧНИК РАДИОИЗЛУЧЕНИЯ В ДВУХПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2262649C1 |
Изобретение относится к эксплуатации водного транспорта и касается технологии управления движением морских судов с помощью распознавания в массиве находящихся на морской акватории тех судов, между которыми возможно опасное сближение. Способ распознавания опасного сближения двух судов заключается в том, что измеряют координаты каждого судна и по ним оценивают текущие координаты и вектор скорости каждого судна. Затем определяют точки наибольшего сближения двух судов, сравнивают минимальное расстояние между судами с допустимым расстоянием и формулируют вывод о судах, как о создающих или не создающих опасную ситуацию. При этом дополнительно вводят операцию оценивания вектора ускорения и среднеквадратичных ошибок погрешностей оценивания ускорения каждого судна. После этого с учетом вычисляемой величины отношения абсолютных значений оценок ускорений каждого из двух судов к соответствующим среднеквадратичным погрешностям их оценивания формулируют вывод о судах, как о создающих или не создающих опасную ситуацию. Технический результат реализации изобретения заключается в уменьшении ошибки определения точек наибольшего сближения тех судов, чье движение не является прямолинейным и равномерным. 11 ил.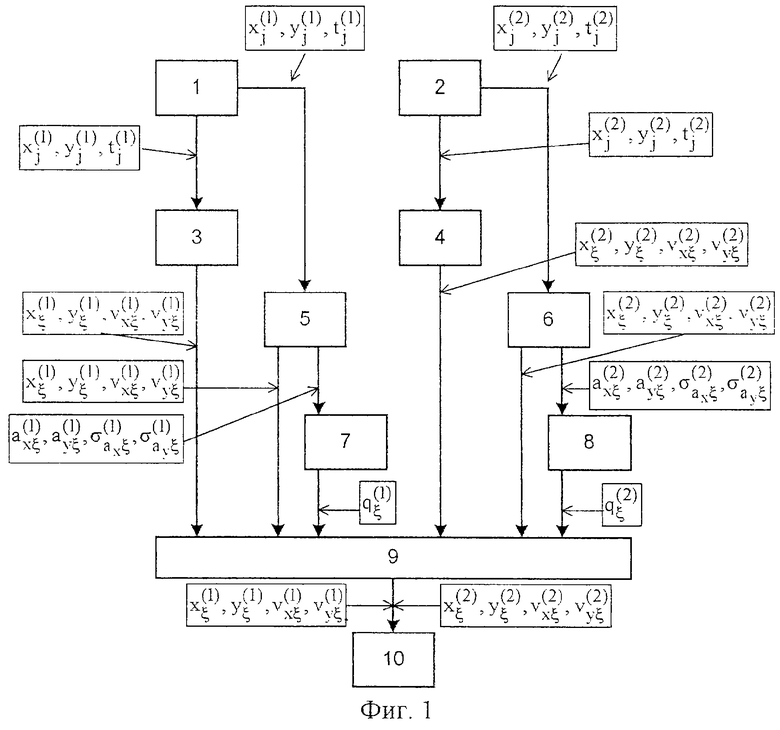
Способ распознавания опасного сближения двух судов, при котором измеряют координаты каждого судна и по ним оценивают текущие координаты и вектор скорости каждого судна, а затем определяют точки наибольшего сближения двух судов, сравнивают минимальное расстояние между судами с допустимым расстоянием и формулируют вывод о судах, как о создающих или не создающих опасную ситуацию, отличающийся тем, что дополнительно вводят оценивание вектора ускорения и среднеквадратичных ошибок погрешностей оценивания ускорения каждого судна и затем с учетом вычисляемой величины отношения абсолютных значений оценок ускорений каждого из двух судов к соответствующим среднеквадратичным погрешностям их оценивания формулируют вывод о судах, как о создающих или не создающих опасную ситуацию.
| Вычислительная система "Антикон" для предотвращения столкновения судов | 1983 |
|
SU1136178A1 |
| US 3725918 A, 03.04.1973 | |||
| US 3717873 А, 20.02.1973. | |||

