Изобретение относится к машиностроению и может быть использовано для оценки качества различных типов промышленных роботов и манипуляторов.
Цель изобретения - повьппение прочности получения оценочных характеристик испытуемого робота, в частности, за счет повышения точности измерения, а также облегчения измерительной части стенда.
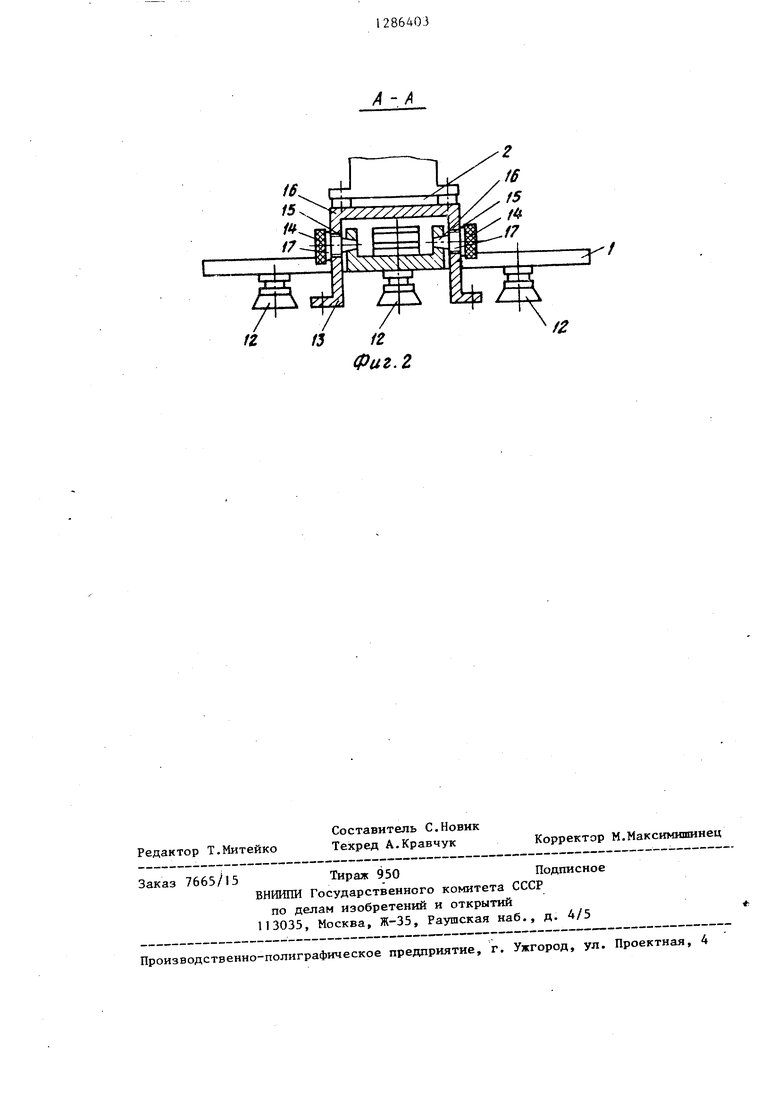
На фиг.1 изображен предлагаемый стенд, общий вид; на фиг,2 - разрез А-А на фиг,1 (устройство фиксации стенда),
Стенд состоит из основной и дополнительной 2 плит, образующих при их соединении единое целое,
На основной плите 1 располагаются телескопические штанги 3 с датчиками 4 положения системы управления. Штанги 3 снабжены элементами фиксации 5 и расположены на лежащих на плите 1 направляюших 6, которые, например, радиально расходятся от точки,, совпадающей с осью поворота руки испытуемого робота-манипулятора 7. Направляющие 6 снабжены элементами фиксации 8, На торце плиты 1 по длине направляющих 6 и по высоте штанг 3 расположены измерительные шкалы 9, 10 и 11. На нижней поверхности основной плиты 1 располагаются подвижные, регулируемые по высоте, упоры 12.
Дополнительная плита 2, на которой крепится испытуемый робот-манипулятор 7, снабжена кронштейнами 13, жестко связанными с основанием стенда. Основная плита 1 посредством одного из кронштейнов 13 связана с дополнительной плитой 2 винтом 14. Последний имеет резьбовую часть 15, конусный хвостовик 16 и опорный -выступ 17. Кронштейн 13 и винты 14 образуют стыковочный узел. Пульт управления стенда и система управления робота- манипулятора, кроме датчиков 4, на чертеже не показаны.
Стенд работает следующим образом. Настройка стенда производится соединением между собой основкой 1 и дополнительной 2 плит путем поворота
винта 14. При этом опорный выступ 17 плотно прижимается к дополнительной плите 2, а конусный хвостовик 16 упирается в конусное посадочное отверстие основной плиты 1, в этом положеНИИ путем регулировки упоров 12 добиваются параллельности основной плиты 1 и дополнительной плиты 2 с испытуемым роботом-манипулятором 7. Путем , выдвижения телескопических штанг 3 и
поворота направляющих 6 датчики положения 4 устанавливаются в требуемые положения и фиксируются элементами 5 и 8. После настройки стенда основная плита 1 отсоединяется от дополнительной 2 соответствующим поворотом винтов 14, При работе робота-манипулятора 7 информация с датчиков 4 положения поступает к пульту управления стенда.
Формула изобретения Стенд для испытаний промьшгленного робота, содержащий основание, пульт управлен ия, плиту с направляющими, на которых смонтированы телескопические штанги, имеющие основные датчики, дополнительные датчики, предназначенные для установки на руке промьшшен- ного робота, измерительные шкалы, расположенные соответственно на плите, направляющих и штангах, причем датчики входят в систему управления, отличающийся тем, что, с целью повьппения точности получения оценочных характеристик испытуемого
робота, плита выполнена составной из двух частей, связанных между собой стыковочным узлом, причем одна часть плиты жестко связана с Основанием и на ней выполнены базовые элементы
для монтажа испытуемого робота, а вторая часть плиты снабжена подвижными упорами для ее регулировочных перемещений относительно первой части плиты и основания, а направляющие и по меньшей мере одна измерительная шкала расположены на этой части плиты.
А -А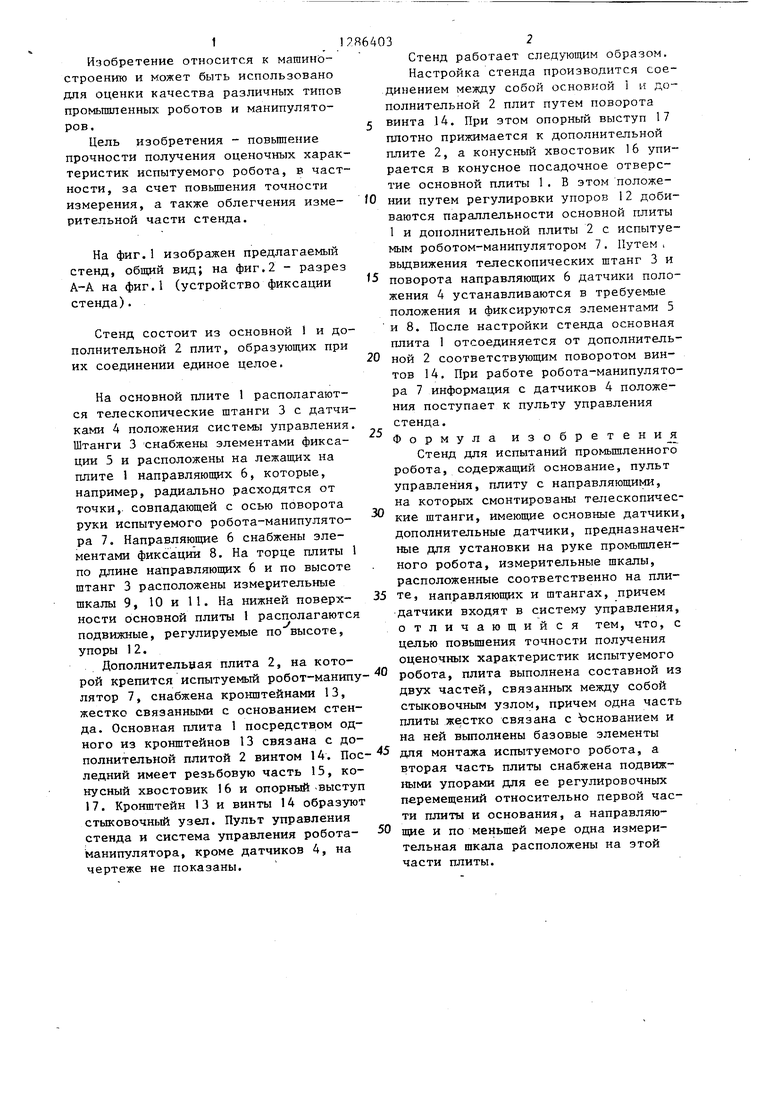
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания промышленного робота-манипулятора | 1982 |
|
SU1039704A1 |
| Стенд для испытания роботов | 1986 |
|
SU1335448A2 |
| Стенд для испытаний манипуляторов | 1983 |
|
SU1135638A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ УПРУГОГО ЭЛЕМЕНТА ПОДВЕСКИ | 1973 |
|
SU368512A1 |
| ЛЕСОПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2247019C2 |
| Стенд для испытания шпиндельных узлов | 1989 |
|
SU1703268A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1495114A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЗАЩИТНОГО УСТРОЙСТВА СИСТЕМЫ ВЕНТИЛЯЦИИ | 2007 |
|
RU2353860C1 |
Изобретение относится к машиностроению и может быть использовано для оценки качества различных типов промьшшенных роботов. Целью изобретения является повышение точности измерений за счет исключения влияния на измерительную часть стенда вибраций и ударов робота об упоры и ограничители. Стенд содержит пульт управления, основную плиту 1 с направляющими 6, на которых смонтированы телескопические штанги 3, и дополнительную плиту 2, на которой установлен робот 7. Основная 1 и дополнительная 2 плиты связаны между собой стыковочным устройством с возможностью образования единой жесткой конструкции или отсоединения их в рабочем режиме. Устройство фиксации выполнено в виде двух стыковочных узлов. 2 ил. fS
tz
fZ
Редактор Т.Митейко
Составитель С.Новик Техред А.Кравчук
Заказ 7665/15Тираж 950Подписное
ВНИИПИ Государствеиного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор М.Максимишинец
| Стенд для испытания промышленного робота-манипулятора | 1982 |
|
SU1039704A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
