Область техники, к которой относится изобретение
Изобретение относится к системам наблюдения за полетом космических аппаратов и может использоваться для определения орбиты космического аппарата (КА) по навигационным измерениям ее параметров.
Предшествующий уровень техники.
Известен способ определения параметров орбиты космического аппарата, заключающийся в выполнении измерений траекторных параметров, передаче в комплекс управления совокупности измеренных значений траекторных параметров с последующим их накапливанием и обработкой [1]. Согласно изобретению применяют четыре этапа обработки траекторных данных. После первого из них запоминают данные об ориентации плоскости орбиты и фильтруют их вместе с аналогичными данными, накопленными на интервале в несколько десятков суток. Определяют точные параметры плоскости орбиты, применяя их на следующем этапе, где получают оценки четырех параметров движения в плоскости орбиты, которые запоминают и фильтруют вместе с аналогичными данными, накопленными на интервале продолжительностью несколько суток. По ним определяют точные значения параметров движения в плоскости орбиты. Недостатками способа являются:
- необходимость проведения многоэтапной обработки измеренных траекторных параметров, увеличивающей продолжительность выполнения расчетов по определению параметров орбиты;
- невозможность определения параметров орбиты в случае, если вектор начального приближения искомых параметров находится вне узких границ допустимой области нахождения параметров начального приближения.
Известен способ определения параметров орбиты космического аппарата [2], целью которого является повышение точности и надежности определения параметров движения КА. Технический результат достигается за счет увеличения количества задаваемых параметров движения, используемых для оценки орбитальной траектории.
Недостатком способа является существенная зависимость решения от точности начального приближения искомых параметров и невозможность определения орбиты в случае, если начальное приближение искомых параметров находится вне границ допустимой области.
Известен способ-прототип определения параметров орбиты КА, при котором разрабатывают программу проведения измерений навигационных параметров орбиты КА для наземных измерительных станций, измеряют навигационные параметры орбиты с помощью наземных измерительных станций, передают измеренные навигационные параметры в вычислительный центр, в котором проводят предварительную обработку результатов измерений навигационных параметров, определяют параметры орбиты по измеренным навигационным параметрам и вектору начального приближения искомых параметров орбиты, при этом моменты времени проведения измерений навигационных параметров используют в качестве программы измерений, а значения навигационных параметров, измеренные наземными станциями, в качестве результатов измерений [3, с.170-172], [4, с.302-303].
При использовании описанного способа для определения орбиты могут измерять следующие виды навигационных параметров: наклонную дальность, радиальную скорость, углы ориентации линии визирования [5, с.149].
В описанном способе при обработке результатов измерений навигационные параметры записывают в функции времени. Основными исходными данными, используемыми для определения параметров орбиты, КА являются результаты измерений навигационных параметров и начальное приближение искомых параметров [3, с.171], [6, с.39], которые включают:
- программу проведенных измерений навигационных параметров орбиты, представленную в виде совокупности последовательных моментов времени, в которые выполнены измерения одного или нескольких видов навигационных параметров орбиты;
- совокупность измеренных навигационных параметров, каждому из которых соответствует значение времени его проведения;
- вектор начального приближения искомых параметров орбиты, представляющий собой значения параметров орбиты, описывающих пространственное движение КА, и соответствующий им момент времени.
Вектор начального приближения искомых параметров орбиты описывает орбитальное движение недостаточно точно. Поэтому при определении параметров орбиты необходимо провести его уточнение по результатам навигационных измерений.
Задача определения параметров орбиты относится к широкому классу обратных задач - задач оценки параметров некоторой системы, в тех случаях, когда оцениваемые параметры системы недоступны непосредственному измерению. Возможность нахождения решения таких задач зависит от погрешности, с которой задано начальное приближение оцениваемых параметров. Таким образом, возможность определения параметров орбиты по результатам измерений зависит от погрешности вектора начального приближения искомых параметров орбиты. При больших отклонениях вектора начального приближения от значений искомых параметров (иначе говоря, от действительных значений параметров орбиты) определить параметры орбиты не удается даже при наличии необходимого количества измерений навигационных параметров, выполненных с высокой точностью [6, с.42].
В практических задачах определения орбиты большие отклонения параметров вектора начального приближения могут возникать в следующих неблагоприятных случаях:
1) после завершения этапа выведения КА на орбиту, когда параметры полученной орбиты существенно отличаются от априори заданных орбитальных параметров;
2) при продолжительных интервалах между навигационными определениями параметров орбитального движения, когда действительные значения параметров орбиты существенно отклоняются от прогнозируемых значений вследствие воздействия факторов космической среды, неучтенных в математической модели движения КА.
Недостатком описанного способа-прототипа является невозможность определения параметров орбиты КА по измеренным навигационным параметрам в случае, если вектор начального приближения находится вне границ допустимой области нахождения параметров начального приближения. Важно подчеркнуть, что границы допустимой области определены используемым способом определения орбиты.
Раскрытие изобретение.
Задача, на решение которой направлено заявленное изобретение, состоит в обеспечении возможности определения параметров орбиты при значительных отклонениях параметров вектора начального приближения от действительных значений, иначе говоря, от искомых значений.
Технический результат, достигаемый заявленным изобретением, заключается в повышении надежности выполнения технологического процесса определения орбиты при значительном отклонении вектора начального приближения от искомых параметров орбиты за счет существенного расширения границ области нахождения параметров начального приближения.
В основу изобретения положен новый порядок действий при обработке измерений навигационных параметров орбиты. Предложенная в способе новая совокупность действий предусматривает преобразование результатов навигационных измерений и обеспечивает существенное снижение требований к точности задания начального приближения искомых параметров орбиты.
Сущность изобретения заключается в том, что для достижения указанных выше технических результатов в способе определения орбиты разрабатывают программу проведения измерений навигационных параметров орбиты КА для наземных измерительных станций, измеряют навигационные параметры орбиты КА с помощью наземных измерительных станций, передают измеренные навигационные параметры в вычислительный центр, в котором проводят предварительную обработку результатов измерений навигационных параметров, определяют параметры орбиты по измеренным навигационным параметрам и вектору начального приближения искомых параметров орбиты, согласно изобретению при предварительной обработке и определении орбиты моменты времени проведения измерений навигационных параметров используют в качестве результатов измерений, а значения навигационных параметров, измеренные наземными станциями, используют в качестве программы измерений.
Существенные признаки, характеризующие изобретение.
1) Изменение порядка действий при обработке результатов измерений навигационных параметров орбиты, заключающееся в том, что моменты времени, в которые проведены измерения, при определении параметров орбиты используют в качестве результатов измерений, а соответствующие моментам времени навигационные параметры орбиты, действительно измеренные наземными станциями, используют в качестве программы выполненных измерений.
2) Выполнение следующей совокупности последовательных действий для определения параметров орбиты:
а) составление программы навигационных измерений, при разработке которой планируют временные интервалы для проведения измерений каждой измерительной станцией;
б) осуществляют измерение навигационных параметров орбиты с помощью измерительных станций в соответствии с программой навигационных измерений и получают измеренные значения навигационных параметров в функции времени;
в) передают измеренные навигационные параметры и соответствующие им моменты времени в вычислительный центр;
г) в вычислительном центре осуществляют преобразование результатов проведенных измерений и записывают навигационные параметры орбиты, измеренные наземными станциями, в качестве программы выполненных измерений, а соответствующие навигационным параметрам моменты времени записывают в качестве измеренных значений навигационных параметров орбиты;
д) проводят предварительную обработку преобразованных навигационных параметров орбиты, при этом в качестве измеренных значений, иначе говоря, значений функции, используют моменты времени, в качестве независимого аргумента - значения линейного или скоростного параметра траектории, действительно измеренного наземной станцией;
е) определяют параметры орбиты по результатам преобразованных навигационных параметров орбиты прошедших предварительную обработку, и вектору начального приближения искомых параметров орбиты.
Выполнение пункта «г» изложенной последовательности действий существенно отличает предложенную совокупность действий от последовательности способа-прототипа. В связи с тем, что в соответствии с пунктом «г» осуществляют преобразование результатов измерений, в заявленном способе алгоритмы действий при предварительной обработке и определении орбиты отличаются от соответствующих алгоритмов способа-прототипа.
Содержание преобразования результатов навигационных измерений при выполнении последовательности действий заявленного способа допускает следующую формализованную интерпретацию. Результаты измерений навигационных параметров орбиты, полученные измерительными станциями, представим в виде множества Z

где zj - измеренное значение навигационного параметра; tj - время проведения j-го измерения, m - количество измерений.
Программу выполненных измерений представим в виде

При использовании способа-прототипа определение орбиты осуществляют последовательными итерациями, и расчет сводится к минимизации функционала наименьших квадратов вида

где zp(tj, Xk) - расчетное значение параметра zj(tj) на некоторой расчетной орбите, заданной вектором параметров Хk, ωj - веса измерений; Хk - вектор параметров орбиты, соответствующей некоторой итерации k=0, 1, 2…; Х0 - вектор начального приближения искомых параметров орбиты.
При использовании заявленного способа осуществляют преобразование результатов навигационных измерений, и результаты измерений записывают в виде множества Z*

Преобразованным измерениям соответствует программа измерений, которую запишем в виде

В заявленном способе определение орбиты сводится к минимизации функционала вида

где t(zj) - значение времени измерения параметра zj; Х0 - вектор начального приближения искомых параметров орбиты; tp(zj, Xk) - расчетное значение времени, соответствующее параметру zj на орбите Хk; 
При использовании способа-прототипа и функционала (3) определение параметров орбиты сводится к минимизации рассогласования между двумя значениями навигационного параметра - измеренным и расчетным, т.е. значениями, соответствующими одному и тому же моменту времени, одно из которых относится к действительной, а другое к расчетной орбите.
При использовании заявленного способа и функционала (6) определение параметров орбиты сводится к минимизации рассогласования между двумя моментами времени достижения одинакового значения навигационного параметра, при этом один момент соответствует действительному орбитальному движению, второй - движению по расчетной орбите.
Подтверждение возможности получения заявленного технического результата при использовании предложенного способа получено путем проведения многочисленных экспериментальных расчетов. Результаты расчетов подтвердили существенное расширение границ допустимой области нахождения параметров начального приближения при использовании заявленного способа. Расчеты проведены по результатам натурных измерений навигационных параметров орбиты.
Пример, подтверждающий существенное расширение границ при использовании предложенного способа по сравнению со способом-прототипом приведен в таблицах 1 и 2. В таблицах представлены границы допустимой области нахождения начального приближения способа-прототипа и заявленного способа.
Оценка границ получена по результатам измерения радиальной скорости движения КА, находящегося на околокруговой орбите высотой 1000 км с драконическим периодом обращения Тд=104 мин. Измерения выполнены относительно наземных измерительных станций на интервале полета продолжительностью 25 мин. Искомые параметры орбиты КА заданы кеплеровскими элементами:

В таблице 1 представлены минимальные и максимальные значения границ параметров начального приближения, соответствующие способу-прототипу, а в таблице 2 - заявленному способу. В столбцах 2 и 3 показаны значения границ, а в скобках указаны отклонения граничных значений от значений параметров вектора (7). В последней строке приведены значения допустимого отклонения момента времени t0, на который заданы начальные условия.
Из таблиц 1, 2 видно, что границы области допустимых значений заявленного способа существенно превосходит границы способа-прототипа. Так, например, из последних строк таблиц следует, что заявленный способ позволяет определить орбиту при отклонении времени привязки начальных условий в диапазоне значений [-74, +17] мин, а способ-прототип при существенно меньших границах допустимого диапазона значениях - [-3, +2] мин.
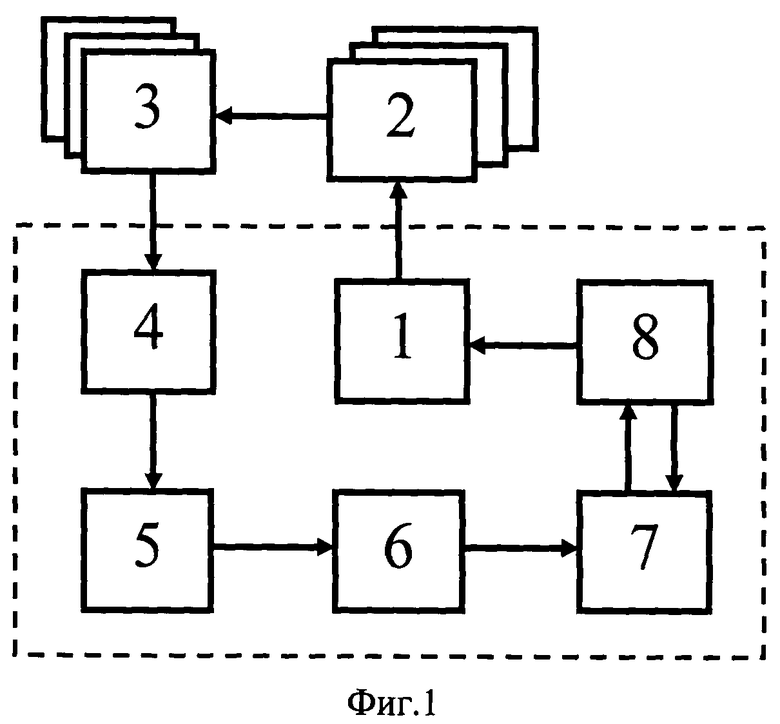
Блок-схема системы, предназначенной для определения орбиты в соответствии с заявленным способом, представлена на фиг.1.
Система включает блок разработки программы навигационных измерений 1, наземные измерительные станции 2, средства передачи результатов измерений навигационных параметров 3, блок хранения результатов навигационных измерений 4, блок преобразования результатов навигационных измерений 5, блок предварительной обработки 6, блок определения параметров орбиты 7, блок хранения параметров орбиты 8. В составе вычислительного центра, в котором осуществляют обработку навигационных измерений, входят блоки 1, 4, 5, 6, 7, 8, которые объединены на чертеже пунктирной линией. При этом первый вход блока определения параметров орбиты 7 соединен с выходом блока предварительной обработки 6, второй вход блока определения параметров орбиты 7 соединен со вторым выходом блока хранения параметров орбиты 8, первый выход блока хранения параметров орбиты 8 соединен со входом блока разработки программы навигационных измерений 1.
Система работает следующим образом.
Блок разработки программы навигационных измерений 1 получает параметры орбиты, поступающие из блока 8, составляет программу измерения навигационных параметров и передает программу на наземные измерительные станции 2, которые измеряют навигационные параметры орбиты в соответствии с программой измерений. Средства передачи результатов навигационных измерений 3 передают измерения в вычислительный центр для обработки навигационной информации, которые поступают в блок хранения результатов навигационных измерений 4.
Блок преобразования результатов навигационных измерений 5 осуществляет преобразование измеренных навигационных параметров в соответствии с порядком действий заявленного способа и записывает моменты времени проведения измерений навигационных параметров в качестве результатов измерений, а значения навигационных параметров, измеренные наземными станциями, в качестве программы измерений. Блок 6 осуществляет предварительную обработку преобразованных результатов навигационных измерений, которые поступают после обработки в блок 7.
В блок определения параметров орбиты 7 принимает значения вектора начального приближения искомых параметров орбиты из блока 8 и преобразованные результаты навигационных измерений из блока 6. Затем блок 7 осуществляет определение параметров орбиты по значениям вектора начального приближения и преобразованным результатам навигационных измерений. Рассчитанные параметры орбиты поступают для хранения в блок 8.
Промышленная применимость
Основной технический результат, достигаемый заявленным изобретением, заключается, в повышении надежности успешного выполнения технологического цикла определения орбиты по результатам навигационных измерений при значительном отклонении вектора начального приближения от искомых параметров орбиты. Результат достигается за счет расширения границ допустимой области нахождения параметров начального приближения.
Достоинством заявленного изобретения является то, что его внедрение в практику управления полетами КА не требует измерения, во-первых, обычных организационных мероприятий, выполняемых в настоящее время при измерении навигационных параметров орбиты, во-вторых, порядка работы измерительных станций и действий обслуживающего персонала. Необходимо применение нового порядка выполнения действий при обработке результатов навигационных измерений в вычислительном центре.
Предложенный способ обеспечивает возможность определения параметров орбиты КА по измеренным навигационным параметрам в случае, если вектор начального приближения находится вне узких границ допустимой области нахождения параметров начального приближения.
Из последовательности действий, необходимой для осуществления способа следует, что заявленный способ может быть использован при определении параметров орбиты космических аппаратов и многократно воспроизведен.
Литература
1. Патент №2150414 RU, МПК7 B64G 3/00, G01S 3/42. Способ определения параметров орбиты космического аппарата / Денисов К.И., Вомпе А.А., заявлено 01.02.1999, Опубл. 10.06.2000.
2. Патент №2391265 РФ, МПК B64G 3/00, G09В 23/00. Система оценивания точности определения параметров движения ИСЗ / Михайлова В.П., Немцов В.И., Садовников О.Г., заявлено 15.06.2009, Опубл. 10.05.2010.
3. Навигационное обеспечение полета орбитального комплекса «Салют-6»-«Союз»-«Прогресс» / И.К.Бажинов, В.П.Гаврилов, В.Д.Ястребов и др. - М.: Наука, 1985.
4. ГЛОНАСС. Принципы построения и функционирования. / Под ред. А.И.Петрова, В.Н.Харисова. - М.: Радиотехника, 2005.
5. Иванов Н.М., Лысенко Л.Н. Баллистика и навигация космических аппаратов. - М.: Дрофа, 2004.
6. Брандин В.Н., Разоренов Г.Н. Определение траекторий космических аппаратов. - М.: Машиностроение, 1978.
Изобретение относится к системам наблюдения за полетом космических аппаратов (КА) и может использоваться для определения параметров орбиты. Проводят измерения навигационных параметров орбиты КА с помощью наземных измерительных станций. Передают измеренные навигационные параметры в центр обработки. Там осуществляют преобразование измеренных параметров, при котором записывают моменты времени проведения измерений навигационных параметров в качестве программы измерений, а значения навигационных параметров, измеренные наземными станциями - в качестве результатов измерений. Проводят предварительную обработку преобразованных навигационных параметров и определяют параметры орбиты по преобразованным навигационным параметрам и вектору начального приближения искомых параметров орбиты. Достигаемый технический результат - повышение надежности выполнения технологического цикла определения параметров орбиты при значительном отклонении вектора начального приближения от искомых параметров орбиты за счет существенного расширения границ допустимой области нахождения параметров начального приближения. 1 ил., 2 табл.
Способ определения орбиты космического аппарата, в котором разрабатывают программу проведения измерений навигационных параметров орбиты КА для наземных измерительных станций, измеряют навигационные параметры орбиты КА с помощью наземных измерительных станций, передают измеренные навигационные параметры в вычислительный центр, в котором проводят предварительную обработку результатов измерений навигационных параметров, определяют параметры орбиты по измеренным навигационным параметрам и вектору начального приближения искомых параметров орбиты, отличающийся тем, что при предварительной обработке и определении орбиты моменты времени проведения измерений навигационных параметров используют в качестве результатов измерений, а значения навигационных параметров, измеренные наземными станциями, используют в качестве программы измерений.
| ГЛОНАСС | |||
| Принципы построения и функционирования./ Под ред | |||
| А.И | |||
| ПЕТРОВА, В.Н | |||
| ХАРИСОВА | |||
| - М.: Радиотехника, 2005, с.302-303 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПРОГНОЗИРОВАНИЯ ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА НИЗКИХ ОРБИТАХ, ПОДВЕРЖЕННОГО ВЛИЯНИЮ ТОРМОЖЕНИЯ В АТМОСФЕРЕ | 2011 |
|
RU2463223C1 |
| СИСТЕМА ОЦЕНИВАНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСЗ | 2009 |
|
RU2391265C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 1999 |
|
RU2150414C1 |
| RU 2009136088 A, 10.04.2011 | |||
| JP 2008064566 A, 21.03.2008 | |||
| Дисковая борона для обработки почвы в междурядьях многолетних насаждений | 1982 |
|
SU1076005A1 |
| WO 1999040692 A1, 12.08.1999 | |||
| УСТРОЙСТВО ОСУШЕНИЯ И УВЛАЖНЕНИЯ, ОСУШИТЕЛЬ-ОЧИСТИТЕЛЬ ВОЗДУХА, УВЛАЖНИТЕЛЬ-ОЧИСТИТЕЛЬ ВОЗДУХА И СПОСОБ ИХ ЭКСПЛУАТАЦИИ | 2015 |
|
RU2689855C2 |
| US 6317660 B1, 13.11.2001. | |||

