Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств контроля работоспособности навигационной аппаратурой потребителя (НАП) спутниковой радионавигационной системы (СРНС) воздушного судна (ВС).
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ автоматического контроля целостности (см., например, ГЛОНАСС. Принципы построения и функционирования / Под. ред. А.И. Перова, В.Н. Харисова. Изд. 3-е, перераб. - М.: Радиотехника, 2005, 688 с. С. 479), основанный на комплексировании НАП СРНС с инерциальной навигационной системой (ИНС), позволяющий контролировать работоспособность НАП СРНС, путем сопоставления измерений пространственных координат ВС, формируемых НАП СРНС с одной стороны и ИНС, с другой стороны.
К недостаткам прототипа относится снижение вероятности правильного контроля работоспособности НАП СРНС с увеличением длительности полета ВС. Это объясняется тем, что с течением времени в ИНС накапливается ошибка измерений, которая может приводить к ложному решению о неработоспособности НАП СРНС.
Техническим результатом изобретения является повышение вероятности правильного контроля работоспособности НАП СРНС.
Указанный результат достигается тем, что в известном способе определяют контрольные моменты времени ti на протяжении τпол. полета ВС, определяют расстояние RНАПi между пространственными координатами ВС, измеренными с использованием НАП СРНС в контрольные моменты времени ti и ti-1, определяют расстояние RИНСi между пространственными координатами ВС, измеренными с использованием ИНС в контрольные моменты времени ti и ti-1, определяют модуль MRi разности между расстояниями RНАПi и RИНСi, сравнивают модуль MRi разности между расстояниями RНАПi и RИНСi с заданным допустимым значением h, если модуль MRi разности между расстояниями RНАПi и RИНСi не превышает заданного допустимого значения h, то вырабатывают решение о работоспособности НАП СРНС на момент времени ti, в противном случае вырабатывают решение о неработоспособности НАП СРНС на момент времени ti.
Сущность изобретения заключается в том, что решение о неработоспособности НАП СРНС, вырабатывается в результате выявления несоответствия расстояний между двумя контрольными точками, определяемых с использованием НАП СРНС с одной стороны и ИНС с другой стороны в контрольные моменты времени ti и ti-1 на протяжении полета ВС. Это позволяет снизить зависимость вырабатываемого решения от накопленной ошибки измерений ИНС и, как следствие, повысить вероятность правильного контроля работоспособности НАП СРНС. Снижение зависимости вырабатываемого решения от влияния накопленной ошибки измерений ИНС объясняется тем, что накопленная ошибка расстояния RИНСi зависит только от интервала времени между контрольными моментами времени ti и ti-1, и не зависит от длительности полета ВС.
Данный способ включает в себя следующие этапы:
1. Измерение пространственных координат хНАП=[хНАП,yНАП,zНАП] ВС в заданной прямоугольной системе координат OXYZ с использованием НАП СРНС в течение полета ВС.
2. Измерение пространственных координат хИНC=[хИНC,yИНC,zИНC] ВС в заданной прямоугольной системе координат OXYZ с использованием ИНС в течение полета ВС.
3. Определение контрольных моментов времени ti на протяжении τпол. полета ВС в соответствии с выражением

где t1 - первый заданный контрольный момент времени,  ,
,  , Δt - заданный интервал времени между контрольными моментами времени ti, τпол. - длительность полета воздушного судна.
, Δt - заданный интервал времени между контрольными моментами времени ti, τпол. - длительность полета воздушного судна.
4. Определение расстояния RНАПi между пространственными координатами ВС, измеренными с использованием НАП СРНС в контрольные моменты времени ti и ti-1 в соответствии с выражением

5. Определение расстояния RИНСi между пространственными координатами ВС, измеренными с использованием ИНС в контрольные моменты времени ti и ti-1 в соответствии с выражением

6. Определение модуля разности между расстояниями RНАПi и RИНСi в соответствии с выражением

7. Формирование решения о работоспособности или неработоспособности НАП СРНС

где χi=1 - НАП является работоспособной, χi=0 - НАП является неработоспособной, h - заданное допустимое (пороговое) значение модуля разности между расстояниями RНАПi и RИНСi.
В соответствии с пунктом 7, решение о том, что НАП СРНС является работоспособной формируется в том случае, если модуль MRi разности между расстояниями RНАПi и RИНСi не превышает заданного допустимого значения h, в противном случае формируется решение о том, что НАП СРНС ВС является неработоспособной.
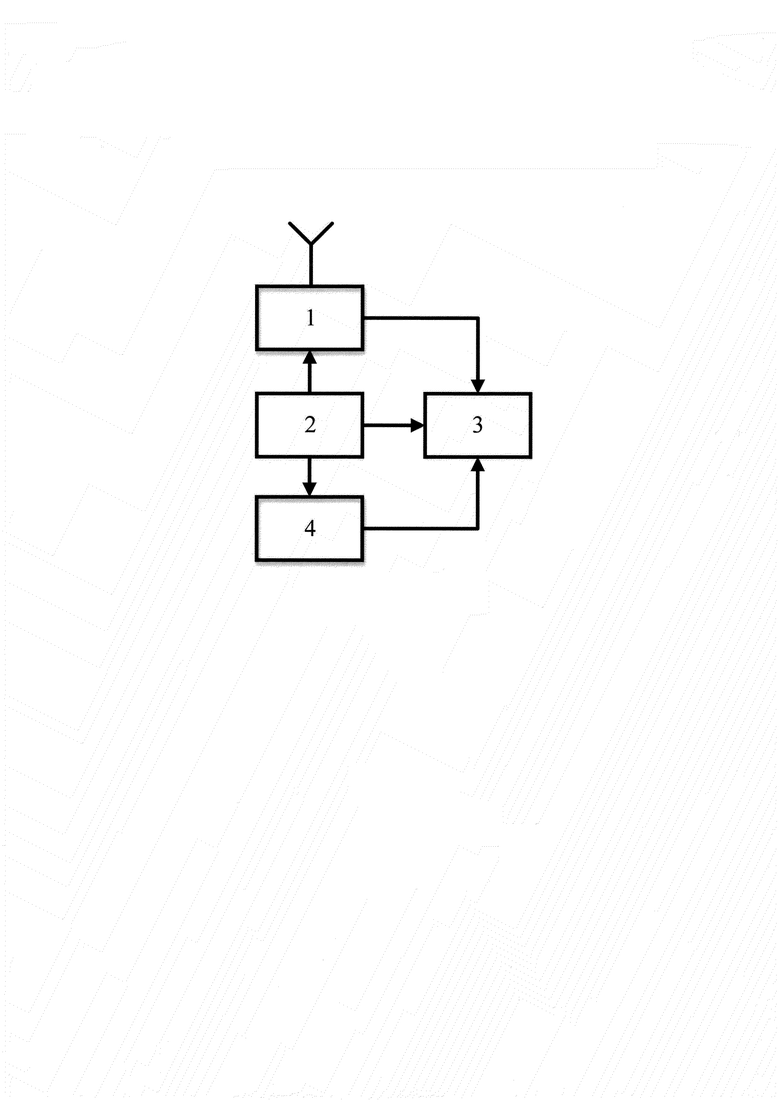
Данный способ может быть реализован, например, с помощью комплекса устройств и систем, структурная схема которого приведена на фигуре, где обозначено: 1 - НАП СРНС; 2 - устройство управления комплексом (УУК); 3 - устройство обработки информации (УОИ); 4 - ИНС.
НАП СРНС 1 предназначена для измерения пространственных координат хНАП=[хНАП,yНАП,zНАП] ВС в заданной прямоугольной системе координат OXYZ. УУК 2 предназначен для управления работой комплекса. УОИ 3 предназначено для обработки информации и выработки решения χi работоспособности или неработоспособности НАП СРНС 1. ИНС 4 предназначена для измерения пространственных координат хИНC=[хИНC,yИНC,zИНC] ВС в заданной прямоугольной системе координат OXYZ.
Комплекс работает следующим образом. УУК 2 управляет работой комплекса. НАП СРНС 1 формирует измерения пространственных координат хНАП=[хНАП,yНАП,zНАП] ВС в заданной прямоугольной системе координат OXYZ в течение его полета. ИНС 4 формирует измерения пространственных координат хИНС=[хИНС,yИНС,zИНС] ВС в заданной прямоугольной системе координат OXYZ в течение его полета. УУК 2 определяет контрольные моменты времени ti на протяжении τпол. полета ВС в соответствии с выражением (1). Под управлением УУК 2 значения хНАПi=[хНАПi,yНАПi,zНАПi] и хИНCi=[хИНCi,yИНCi,zИНCi] пространственных координат ВС в контрольные моменты времени ti поступают с выхода НАП СРНС 1 и ИНС 4 соответственно в УОИ 3. УОИ 3 обрабатывает поступающую информацию с выхода НАП СРНС 1 и ИНС 4 в соответствии с выражениями (2)-(4) и вырабатывает решение χi работоспособности или неработоспособности НАП СРНС 1 в соответствии с выражением (5).
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ контроля работоспособности НАП СРНС ВС, сущность которого заключается в том, что решение о неработоспособности НАП СРНС, вырабатывается в результате выявления несоответствия расстояний между двумя контрольными точками, определяемых с использованием НАП СРНС с одной стороны и ИНС с другой стороны в контрольные моменты времени ti и ti-1 на протяжении полета ВС.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что если решение о неработоспособности НАП СРНС вырабатывать в результате выявления несоответствия расстояний между двумя контрольными точками, определяемых с использованием НАП СРНС с одной стороны и ИНС с другой стороны в контрольные моменты времени ti и ti-1 на протяжении полета ВС, то это приведет к повышению вероятности правильного контроля работоспособности НАП СРНС.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
Изобретение относится к области радиотехники и предназначено для контроля работоспособности навигационной аппаратуры потребителя (НАП) спутниковой радионавигационной системы (СРНС) воздушного судна (ВС). Технический результат изобретения заключается в повышении вероятности правильного контроля работоспособности НАП СРНС. Сущность изобретения заключается в том, что решение о неработоспособности НАП СРНС вырабатывается в результате выявления несоответствия расстояний между двумя контрольными точками, определяемыми с использованием НАП СРНС с одной стороны и инерциальной навигационной системы (ИНС) с другой стороны в контрольные моменты времени ti и ti-1 на протяжении полета ВС. Это позволяет снизить зависимость вырабатываемого решения от накопленной ошибки измерений ИНС и, как следствие, повысить вероятность правильного контроля работоспособности НАП СРНС. 1 ил.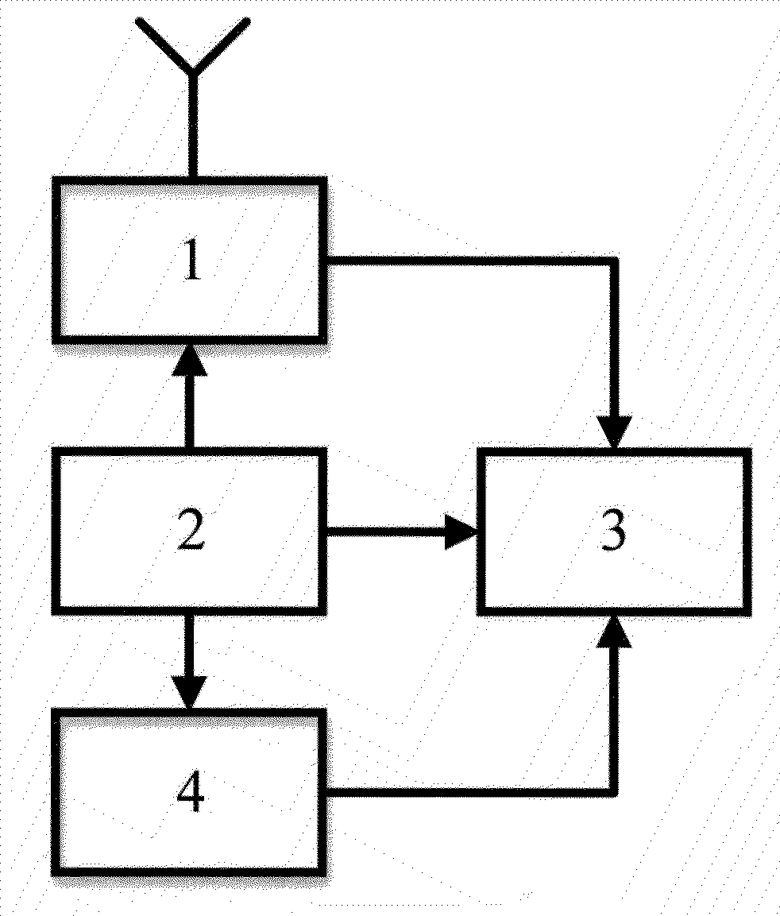
Способ контроля работоспособности навигационной аппаратуры потребителя (НАП) спутниковой радионавигационной системы (СРНС) воздушного судна (ВС), основанный на комплексировании НАП СРНС с инерциальной навигационной системой (ИНС), отличающийся тем, что определяют контрольные моменты времени ti на протяжении τпол. полета ВС, определяют расстояние RНАПi между пространственными координатами ВС, измеренными с использованием НАП СРНС в контрольные моменты времени ti и ti-1, определяют расстояние RИНСi между пространственными координатами ВС, измеренными с использованием ИНС в контрольные моменты времени ti и ti-1, определяют модуль MRi разности между расстояниями RНАПi и RИНСi, сравнивают модуль MRi разности между расстояниями RНАПi и RИНСi с заданным допустимым значением h, если модуль MRi разности между расстояниями RНАПi и RИНСi не превышает заданного допустимого значения h, то вырабатывают решение о работоспособности НАП СРНС на момент времени ti, в противном случае вырабатывают решение о неработоспособности НАП СРНС на момент времени ti.
| Автоматизированная система навигации с контролем целостности навигационных данных спутниковых радионавигационных систем по информации бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2642151C2 |
| US 8200430 B2, 12.06.2012 | |||
| EP 3598177 A1, 22.01.2020 | |||
| СПОСОБ И СИСТЕМА КОНТРОЛЯ ЦЕЛОСТНОСТИ ИЗМЕРЕНИЙ В НАВИГАЦИОННОЙ СИСТЕМЕ | 2008 |
|
RU2464531C2 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ НАВИГАЦИОННОГО ПОЛЯ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2011 |
|
RU2477835C1 |

