Изобретение относится к космонавтике и может быть использовано при ведении космической деятельности - исследованиях космического пространства, планет солнечной системы, наблюдений Земли из космоса и т.п., при которых необходимо определять пространственные координаты космических аппаратов (КА) и составляющие вектора его скорости. Целью решения такой задачи, в первую очередь, является необходимость управления КА для его вывода в заданную область пространства с требуемой точностью.
Учитывая баллистический характер движения КА и ограниченные возможности КА по совершению маневров, для расчета минимальных управляющих воздействий на КА необходимо достаточно точное знание параметров его движения (вектора координат и вектора скорости) в определенный момент времени. От выбора метода и его возможностей зависят энергетические затраты на маневрирование, которые для космических полетов достаточно критичны.
В целом ряде случаев решение задачи определения пространственных координат необходимо решать автономно, т.е. непосредственно на борту КА. Это, в частности, позволяет осуществлять управление КА вне зоны его видимости с национальной территории или на весьма значительных удалениях от Земли, например, в районе геостационарной орбиты или при межпланетных перелетах.
До сих пор для достижения этой цели применяются различные способы.
Существует, например, возможность погрузить на борт космического аппарата радар. Однако масса, стоимость и потребляемая радаром электроэнергия весьма значительны, что создает непреодолимые ограничения для некоторых космических аппаратов.
Можно также выполнять визирование с земли радаром или теодолитами и расчетным путем определять орбиты для определения скорости и искомой траектории.
Однако это приводит к большой зависимости от инфраструктур земли и большой неточности для относительных расстояний менее 20 км. Известны средства и методы определения местоположения объекта (Патент Германии DE4019214, Gsaefe, Volker, G 01 В 11/14, 1991, Patent abstracts of Japan, vol.14, no 101 (P-1012) (4044) 23.02.1990, патент Японии JP-A-1305312, Патент RU 2103202 C1, В 64 G 1/24, 1998). Однако решение по патенту Японии не позволяет точно определять координаты положения объекта в системе отсчета и практически ограничивается определением расстояния между истребителем и мишенью, указанное в патенте Германии техническое решение позволяет лишь определять расстояние между объектом и измерительным устройством.
Кроме того, можно использовать систему спутников позиционирования GPS (Global Positioning System).
Одним из наиболее перспективных методов определения координат в околоземном пространстве, который может быть использован для определения параметров движения КА, является метод, используемый при построении глобальных спутниковых навигационных систем (ГНСС) типа ГЛОНАСС (Россия), GPS (США) и т.п.(Л.1-5).
В основе ГНСС лежит постоянно действующая группировка навигационных космических аппаратов (НКА) с круговыми орбитами на высоте ˜20000 км. Количество и размещение НКА на орбитах обеспечивает в любой точке на поверхности земли и околоземного пространства наблюдение не менее четырех НКА. Навигационная аппаратура НКА формирует и постоянно излучает в направлении на Землю радиосигналы в L-м частотном диапазоне. Относительная стабильность излучаемых частот обеспечивается рубидиевыми, цезиевыми или водородными стандартами частоты и составляет величину порядка 10-13-10-14. Излучаемые НКА радиочастоты модулируются по фазе специальными навигационными радиосигналами, содержащими:
- дальномерные коды - периодически повторяющиеся псевдослучайные последовательности (ПСП), когерентные с излучаемыми частотами;
- навигационные кадры, содержащие информацию о траектории движения НКА и текущем времени.
Структура и характеристики излучений НКА обеспечивают частотное (ГЛОНАСС) или кодовое (GPS) разделение сигналов различных НКА, что позволяет осуществлять их раздельный прием и обработку.
Для определения положения в ГНСС используется псевдо-дальномерный (или разностно-дальномерный метод), для которого используются измерения задержек между известным моментом излучения навигационного сигнала и моментом его приема по не менее чем четырем НКА.
К основным достоинствам ГНСС относятся:
- непрерывность обслуживания, т.е. возможность определения координат практически в любой момент времени;
- глобальность, т.е. возможность определения координат практически в любой точке Земли и околоземного пространства в пределах зоны действия;
- автономность, т.е. возможность определения координат в пассивном режиме приема сигналов, излучаемых НКА;
- открытость, т.е. неограниченное количество пользователей системы.
В то же время, с точки зрения определения координат КА, ГНСС имеет ряд недостатков.
Энергетический потенциал бортовой аппаратуры и форма диаграммы направленности бортовых антенн НКА ограничивает зону действия ГНСС околоземным космическим пространством, не превышающим по высоте 3000 км.
По мере выхода КА за эту высоту уменьшается "геометрический фактор" системы и уменьшается количество одновременно наблюдаемых НКА, что определяет точность определения координат. На высотах более 3000 км появляются и постепенно увеличиваются интервалы времени, на которых количество видимых НКА меньше четырех, и ГНСС не обеспечивает непрерывности обслуживания.
Для определения координат достаточно высоких КА необходимо работать по сигналам только тех НКА, которые находятся на другой, незатененной стороне Земли и только на определенных интервалах времени. При этом шумы Земли, помехи, а также снижение энергетического потенциала радиолинии могут приводить к снижению точности измерений параметров навигационного сигнала и невозможности проведения обсервации КА в необходимое время, что в свою очередь сказывается на точности определения параметров движения КА.
При положении КА на высотах близких и больших 20000 км и тем более для высокоорбитальных и межпланетных КА непрерывное высокоточное определение координат с помощью ГНСС вообще не представляется возможным.
Техническим результатом изобретения является обеспечение высокоточного определения положения космического аппарата практически на любом удалении от Земли.
Для достижения указанного результата предлагается способ определения местоположения космических аппаратов (КА), заключающийся в том, что на промежуточной орбите одновременно с определением координат КА  в начальный момент времени t0 по сигналам Глобальных Навигационных Спутниковых Систем осуществляется прием и детектирование излучений не менее чем трех пульсаров, а затем в процессе дальнейшего движения КА осуществляется определение прироста полной фазы ΔФp=Δϕp+2·π·Np периодического излучения каждого пульсара, причем измерение фазы сигнала пульсара Δϕp определяется относительно фазы высокостабильного опорного генератора КА, а разрешение фазовой неоднозначности Np осуществляется путем подсчета скачков на 2·π измеренной фазы за время полета КА - Δt=t-t0; по проведенным измерениям определяются расстояния, на которое КА переместился за время Δt вдоль направления на каждый пульсар
в начальный момент времени t0 по сигналам Глобальных Навигационных Спутниковых Систем осуществляется прием и детектирование излучений не менее чем трех пульсаров, а затем в процессе дальнейшего движения КА осуществляется определение прироста полной фазы ΔФp=Δϕp+2·π·Np периодического излучения каждого пульсара, причем измерение фазы сигнала пульсара Δϕp определяется относительно фазы высокостабильного опорного генератора КА, а разрешение фазовой неоднозначности Np осуществляется путем подсчета скачков на 2·π измеренной фазы за время полета КА - Δt=t-t0; по проведенным измерениям определяются расстояния, на которое КА переместился за время Δt вдоль направления на каждый пульсар
а положение КА в декартовой системе координат, для случая, когда число пульсаров равно трем, определятся из выражения 
где Dp - расстояние, на которое КА переместился вдоль направления на p-й пульсар за время Δt;
с - скорость света;
Тp - период повторения сигнала, излучаемого p-м пульсаром;
Δϕp - измеренное в момент t значение разности фаз между сигналом p-го пульсара и опорного генератора КА;
Np - количество полных периодов изменения фазы сигнала p-го пульсара за время Δt;
 - вектор-столбец положения КА в момент t;
- вектор-столбец положения КА в момент t;
- вектор-столбец положения КА в начальный момент t0;
 - вектор-столбец оценок перемещения КА в направлении на три пульсара;
- вектор-столбец оценок перемещения КА в направлении на три пульсара;
 - матрица направляющих косинусов, определяющая угловое положение трех пульсаров.
- матрица направляющих косинусов, определяющая угловое положение трех пульсаров.
Астрономические наблюдения и исследования теории образования и развития звезд позволили за несколько последних десятилетий получить достаточно большой объем информации о количестве, расположении и характеристиках пульсирующих звезд - пульсарах.
Излучения пульсаров регистрируются в радио, оптическом, рентгеновском и гамма-диапазонах частот. Формы импульсов для одного и того же пульсара в различных диапазонах различны, однако период их повторения постоянен. Величина периода повторения индивидуальна для каждого пульсара (пульсар в Крабовидной туманности обладает периодом TCrab=33 мс, пульсар PSR1509-58 имеет период TPSR1509=150 мс, а пульсар Vela - TVela=89 мс). Стабильность частоты повторения пульсаров весьма велика и оценивается величиной 10-14 в год.
В настоящее время известно достаточно большое количество пульсаров. Телескопом ROSAT каталогизировано 105924 пульсара в рентгеновском диапазоне, телескоп ATNF обнаружил свыше 1400 пульсаров в радио диапазоне. Рабочий каталог пульсаров содержит 737 объектов, из которых 79 могут характеризоваться как достаточно мощные. Наиболее плотно 27 известных мощных рентгеновских пульсаров сосредоточены в плоскости галактики, а их угловое положение в настоящее время известно с погрешностью ˜0,1 угл.сек.
С точки зрения наблюдателя сигнал, излучаемый пульсаром, в каком-либо частотном диапазоне может быть представлен как периодический сигнал вида

где Тp - период повторения сигнала, излучаемого пульсаром в направлении наблюдателя.
Зафиксируем в любой произвольный момент времени t0 начальную фазу φ0 принятого сигнала и сформируем опорный периодический сигнал Sоп с периодом Тp и начальной фазой φ0.
Измеряя в момент t разницу фаз между принятым и опорным сигналами, можно записать

где Dp - расстояние, на которое наблюдатель переместился вдоль направления на пульсар, за время Δt=t-t0;
с - скорость света;
N - количество полных периодов изменения фазы за время полета.

Расстояние, на которое наблюдатель переместился вдоль направления на пульсар, за время Δt определяется из
Для определения положения наблюдателя в любой произвольно выбранной декартовой системе координат {x, y, z} необходимо провести измерения, не менее чем по трем различным пульсарам, угловые координаты которых в выбранной системе координат известны. Тогда, могут быть получены три оценки Dp1, Dp2, Dp3 соответственно по трем известным направлениям.
Зададим, для определенности, направление на каждый из трех выбранных пульсаров в выбранной декартовой системе координат направляющими косинусам {li, mi, ni}, где li - косинус угла между направлением на пульсар и осью x выбранной системы координат, mi и ni - косинусы углов с осями y и z соответственно; i={1, 2, 3} - порядковый номер пульсара.
Тогда положение наблюдателя в выбранной декартовой системе координат (фиг.1) в момент t0+Δt можно определить из выражений

где - вектор-столбец положения КА в момент t;
 - вектор-столбец положения КА в начальный момент t0;
- вектор-столбец положения КА в начальный момент t0;
- вектор-столбец оценок перемещения КА в направлении на пульсары;
- матрица направляющих косинусов.
Для определения величины N при произвольном характере движения КА или достаточно больших интервалах Δt воспользуемся следующим приемом. Выберем интервал δt, удовлетворяющий условию δt<Tp<Δt и в моменты времени tj=t0+j·δt для {j=0,1,2,3...} будем производить измерения Δϕj и при выполнении условия Δϕj<Δϕj-1 подсчитывать число Nj=Nj-1+1. Очевидно, что в момент t=t0+Δt, полученная оценка Nj будет равна 
Выбор начального момента времени tо определяется возможностью определения начального вектора положения наблюдателя в момент t0. В общем случае такая возможность предоставляется, если начальная точка находится в зоне действия какой-либо из существующих систем определения местоположения (радиолокационной, навигационной и т.п.), обладающей необходимыми техническими возможностями.
Для КА, траектория движения которого независимо от назначения аппарата обычно начинается на промежуточной околокруговой орбите с высотой в диапазоне от 400 км до 2000 км, а дальнейшие маневры и движение может начинаться в любой точке орбиты, представляется целесообразным использование одной или нескольких существующих ГНСС (ГЛОНАСС, GPS и т.п.).
Полученные таким образом координаты КА в различные моменты времени и, учитывая обычно достаточно хорошо известный закон движения, можно известными способами рассчитать параметры движения КА и сделать прогноз его положения на необходимый момент времени.
Условная схема, поясняющая описанный способ, изображена на фиг.2. На схеме изображены три канала, обрабатывающие сигналы от трех пульсаров P1, Р2 и Р3, каждый канал содержит детектор сигналов пульсара, синтезатор опорного сигнала, измеритель фазы и счетчик периодов. Ключи К2 и К3 изображены в разомкнутом положении, что соответствует интервалу времени, на котором определение положения КА осуществляется по навигационному приемнику ГНСС. В момент t=t0 ключи К2 и К3 замыкаются, а ключ K1 размыкается. При этом в вычислителе координат сохраняется начальное положение КА для определения текущего положения КА вне зоны действия ГНСС. С этого же момента времени начинается измерение разности фаз между опорным сигналом и сигналом, принятым от пульсара, обнаружение и подсчет числа скачков фазы N. Для вычисления координат используются оценки фазы Δϕ, значения счетчика N и угловые координаты пульсара l, m, n. В бортовом каталоге пульсаров наряду с угловыми координатами пульсаров так же хранятся параметры его излучения, в частности период и форма его излучения, которые могут использоваться синтезатором, для формирования опорного сигнала.
К основным достоинствам способа относятся:
- глобальность, т.е. возможность определения координат практически в любой точке околоземного пространства в пределах Солнечной системы;
- неуязвимость, т.е. невозможность создания помех системе определения координат практически на всем интервале полета КА;
- непрерывность использования, т.е. возможность определения координат практически в любой момент времени полета КА;
- автономность, т.е. возможность определения координат в пассивном режиме приема сигналов, излучаемых пульсарами;
- открытость, т.е. неограниченное количество КА, одновременно определяющих свои координаты;
Литература
1. "Глобальная спутниковая радионавигационная система ГЛОНАСС", под. Ред. В.Н.Харисова, А.И.Перова, В.А.Болдина, Москва, ИПРЖР, 1998, с.74-89 (прототип).
2. Ю.А.Соловьев "Спутниковая навигация и ее приложения", Москва, ЭКО-ТРЕНДС, 2003.
3. Ю.А.Соловьев "Системы спутниковой навигации", Москва, ЭКО-ТРЕНДС, 2000.
4. Интерфейсный контрольный документ GPS, ICD-200C-002, 25.9.97.
5. Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ, Москва, 1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА КОСМИЧЕСКОЙ НАВИГАЦИИ | 2014 |
|
RU2568937C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛУ РАДИОНАВИГАЦИОННОГО ОРИЕНТИРА | 2008 |
|
RU2367909C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2015 |
|
RU2580827C1 |
| Способ автономного измерения параметров гравитационного поля на борту космического аппарата | 2022 |
|
RU2784481C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЭПИЦЕНТРАЛЬНОЙ ЗОНЫ ИСТОЧНИКА И СКОРОСТИ РАСПРОСТРАНЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ИОНОСФЕРНЫХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2560525C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 1995 |
|
RU2105319C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПО СИГНАЛАМ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2012 |
|
RU2490665C1 |
| СПОСОБ ОДНОЧАСТОТНОГО ОПРЕДЕЛЕНИЯ ЗАДЕРЖКИ СИГНАЛОВ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ В ИОНОСФЕРЕ | 2006 |
|
RU2313103C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |

Изобретение относится к космонавтике и может быть использовано при ведении космической деятельности - исследованиях космического пространства, планет солнечной системы, наблюдений Земли из космоса и т.п., при которых необходимо определять пространственные координаты космических аппаратов (КА) и составляющие вектора его скорости. Техническим результатом изобретения является обеспечение высокоточного определения положения космического аппарата практически на любом удалении от Земли. Для достижения указанного результата предлагается способ определения местоположения космических аппаратов (КА), заключающийся в том, что на промежуточной орбите одновременно с определением координат КА  в начальный момент времени t0 по сигналам Глобальных Навигационных Спутниковых Систем осуществляется прием и детектирование излучений не менее чем трех пульсаров, а затем в процессе дальнейшего движения КА осуществляется определение прироста полной фазы ΔФp=Δϕp+2·π·Np периодического излучения каждого пульсара, причем измерение фазы сигнала пульсара Δϕp определяется относительно фазы высокостабильного опорного генератора КА, а разрешение фазовой неоднозначности Np осуществляется путем подсчета скачков на 2·π измеренной фазы за время полета КА - Δt=t-t0; по проведенным измерениям определяются расстояния, на которое КА переместился за время Δt вдоль направления на каждый пульсар
в начальный момент времени t0 по сигналам Глобальных Навигационных Спутниковых Систем осуществляется прием и детектирование излучений не менее чем трех пульсаров, а затем в процессе дальнейшего движения КА осуществляется определение прироста полной фазы ΔФp=Δϕp+2·π·Np периодического излучения каждого пульсара, причем измерение фазы сигнала пульсара Δϕp определяется относительно фазы высокостабильного опорного генератора КА, а разрешение фазовой неоднозначности Np осуществляется путем подсчета скачков на 2·π измеренной фазы за время полета КА - Δt=t-t0; по проведенным измерениям определяются расстояния, на которое КА переместился за время Δt вдоль направления на каждый пульсар  а положение КА в декартовой системе координат, для случая, когда число пульсаров равно трем, определятся из выражения
а положение КА в декартовой системе координат, для случая, когда число пульсаров равно трем, определятся из выражения  где Dp - расстояние, на которое КА переместился вдоль направления на p-ый пульсар за время Δt; с - скорость света; Тp - период повторения сигнала, излучаемого p-ым пульсаром; Δϕp - измеренное в момент t значение разности фаз между сигналом p-го пульсара и опорного генератора КА; Np - количество полных периодов изменения фазы сигнала p-го пульсара за время Δt;
где Dp - расстояние, на которое КА переместился вдоль направления на p-ый пульсар за время Δt; с - скорость света; Тp - период повторения сигнала, излучаемого p-ым пульсаром; Δϕp - измеренное в момент t значение разности фаз между сигналом p-го пульсара и опорного генератора КА; Np - количество полных периодов изменения фазы сигнала p-го пульсара за время Δt;  - вектор-столбец положения КА в момент t; - вектор-столбец положения КА в начальный момент t0;
- вектор-столбец положения КА в момент t; - вектор-столбец положения КА в начальный момент t0;  - вектор-столбец оценок перемещения КА в направлении на три пульсара;
- вектор-столбец оценок перемещения КА в направлении на три пульсара;  - матрица направляющих косинусов, определяющая угловое положение трех пульсаров. 2 ил.
- матрица направляющих косинусов, определяющая угловое положение трех пульсаров. 2 ил.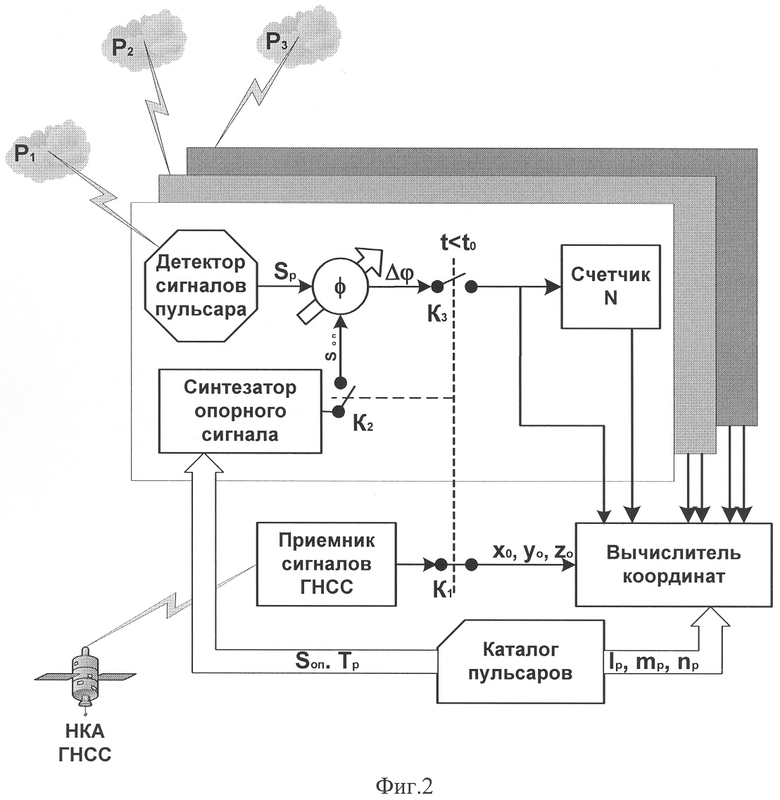
Способ определения местоположения космических аппаратов (КА), заключающийся в том, что на промежуточной орбите одновременно с определением координат КА  в начальный момент времени t0 по сигналам Глобальных Навигационных Спутниковых Систем осуществляется прием и детектирование излучений не менее чем трех пульсаров, а затем в процессе дальнейшего движения КА осуществляется определение прироста полной фазы ΔФp=Δϕp+2·π·Np периодического излучения каждого пульсара, причем измерение фазы сигнала пульсара Δϕp определяется относительно фазы высокостабильного опорного генератора КА, а разрешение фазовой неоднозначности Np осуществляется путем подсчета скачков на 2·π измеренной фазы за время полета КА Δt=t-t0; по проведенным измерениям определяются расстояния, на которое КА переместился за время Δt вдоль направления на каждый пульсар
в начальный момент времени t0 по сигналам Глобальных Навигационных Спутниковых Систем осуществляется прием и детектирование излучений не менее чем трех пульсаров, а затем в процессе дальнейшего движения КА осуществляется определение прироста полной фазы ΔФp=Δϕp+2·π·Np периодического излучения каждого пульсара, причем измерение фазы сигнала пульсара Δϕp определяется относительно фазы высокостабильного опорного генератора КА, а разрешение фазовой неоднозначности Np осуществляется путем подсчета скачков на 2·π измеренной фазы за время полета КА Δt=t-t0; по проведенным измерениям определяются расстояния, на которое КА переместился за время Δt вдоль направления на каждый пульсар
а положение КА в декартовой системе координат для случая, когда число пульсаров равно трем, определяется из выражения
где Dp - расстояние, на которое КА переместился вдоль направления на p-й пульсар за время Δt;
с - скорость света;
Тp - период повторения сигнала, излучаемого p-м пульсаром;
Δϕp - измеренное в момент t значение разности фаз между сигналом p-го пульсара и опорного генератора КА;
Np - количество полных периодов изменения фазы сигнала p-го пульсара за время Δt;
 - вектор-столбец положения КА в момент t;
- вектор-столбец положения КА в момент t;
- вектор-столбец положения КА в начальный момент t0;
 - вектор-столбец оценок перемещения КА в направлении на три пульсара;
- вектор-столбец оценок перемещения КА в направлении на три пульсара;
 - матрица направляющих косинусов, определяющая угловое положение трех пульсаров.
- матрица направляющих косинусов, определяющая угловое положение трех пульсаров.
| Глобальная спутниковая радионавигационная система "ГЛОНАСС"/ Под ред | |||
| В.Н | |||
| ХАРИСОВА и др | |||
| М.: ИПРЖР, 1998, с.74-89 | |||
| АВТОМАТИЧЕСКИЙ ПОВОРОТНЫЙ стол)^^^ | 0 |
|
SU252050A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНЫХ ПОЛОЖЕНИЯ И ТРАЕКТОРИИ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2103202C1 |
| US 4928107 A, 22.05.1990 | |||
| US 5119504 А, 02.06.1992 | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |

