Изобретение относится к отрасли беспилотной авиации, в частности кабелеподъемным и другим видам нагрузки устройствам, предназначенным для оперативной подачи силового кабеля электропитания на привязной высотный беспилотный летательный аппарат и спуска кабеля с него.
Известен полиспаст (см. RU 2192386 С1, 11.10.2002), содержащий неподвижные и подвижные блоки, имеющие возможность вращения вокруг своих осей и охваченные тросом или цепью, один или два конца которых присоединены к соответствующим грузозахватным органам или барабанам грузоподъемных механизмов, лебедок или другим устройствам, создающим тяговое усилие, причем при наличии свободного конца у данных троса или цепи, не присоединенного к последним, он прикреплен к неподвижной опоре или якорю, при этом неподвижные блоки закреплены на неподвижных опорах или заякорены в грунте, подвижные блоки оснащены индивидуальными обоймами, к которым присоединены стропы, тяговые тросы или соответствующие грузозахватные органы, не менее двух из этих блоков установлены в частности на концах рамы полиспаста с возможностью восприятия веса рамы полиспаста или передачи тягового усилия на нее и обеспечения возможности перемещения последней при работе с полиспастом, а остальные подвижные блоки с обоймами размещены в направляющих рамы полиспаста с возможностью обеспечения отсутствия касания ими и их обоймами других частей рамы полиспаста во время работы с полиспастом по подъему или перемещению груза по какой-либо поверхности. Направляющие его рамы могут быть выполнены с возможностью перемещения расположенных в них подвижных блоков с обоймами вдоль последней.
Недостатком этого технического решения можно считать конструктивную сложность, связанную с трудновыполнимостью грузозахватных органов, предназначенных для восприятия веса рамы полиспаста.
Наиболее близким техническим решением к предлагаемому является принятое за прототип устройство для перемещения скважинных приборов под добычным насосом (см. RU 2507372 С1, 20.09.2005), в котором под добычным насосом установлен электропривод, соединенный через коническую шестеренчатую пару и цепную передачу с нижним подвижным блоком полиспаста, устроенного по принципу скоростной передачи. Многожильный геофизический кабель, протянутый с устья скважины, питает электропривод и навит на верхний и нижний блоки полиспаста. Под нижним подвижным блоком полиспаста на конце геофизического кабеля подвешены скважинные приборы, управляемые дистанционно с устья скважины через геофизический кабель. На корпусе устройства в предельных точках хода нижнего подвижного блока полиспаста установлены верхний и нижний концевые переключатели для реверсирования направления вращения электропривода. Благодаря реверсированию электропривода, в устройстве обеспечивается движение подвижного блока полиспаста вверх и вниз с последующим перемещением скважинных приборов вниз и вверх соответственно.
К недостатку этого известного устройства можно отнести низкую эксплуатационную возможность, связанную с механическим износом верхнего и нижнего концевых переключателей, отключающих питание на электроприводе.
Техническим результатом предлагаемого устройства является расширение эксплуатационной возможности при подаче силового питающего кабеля на летательный аппарат и спуске кабеля с него.
Технический результат достигается тем, что в устройство с полиспастом для подачи силового кабеля на привязной беспилотный летательный аппарат содержит кабель, датчик, электропривод, неподвижный и подвижный ролики полиспаста, введены дозированная нагрузка, лебедка с контроллером, клюз вывода кабеля, ремень и преобразователь, при этом вал электропривода ремнем соединен со шкивом барабана лебедки, осуществляющего смотку/размотку кабеля, закрепленного началом на барабане, кабель огибает желоба неподвижного и подвижного роликов полиспаста и проходит через отверстие клюза, конец прошедшего через отверстие клюза кабеля подключен к расположенному на раме беспилотного летательного аппарата преобразователю, ось подвижного ролика через дозированную нагрузку соединен с чувствительным элементом датчика, служащего для определения положения подвижного ролика и передачи информации контроллеру лебедки, корпус датчика, клюз и ось неподвижного ролика закреплены на раме лебедки.
Сущность заявляемого изобретения, характеризуемого совокупностью указанных выше признаков, состоит в том, что на основе использования полиспаста в виде неподвижного ролика и подвижного ролика с дозированной нагрузкой и контроллера, производимого регулируемое управление скоростью вращения барабана лебедки, можно обеспечить безынерционную подачу силового питающего кабеля на летательный аппарат.
Наличие в заявляемом устройстве совокупности перечисленных существующих признаков, позволяет решить задачу подачи силового кабеля на летательный аппарат на базе буфера в виде неподвижного ролика и подвижного ролика с дозированной нагрузкой и регулируемого управления скоростью вращения барабана с намотанным кабелем с желаемым техническим результатом, т.е. расширением эксплуатационной возможности при подаче питающего кабеля на летательный аппарат и спуске кабеля с него.
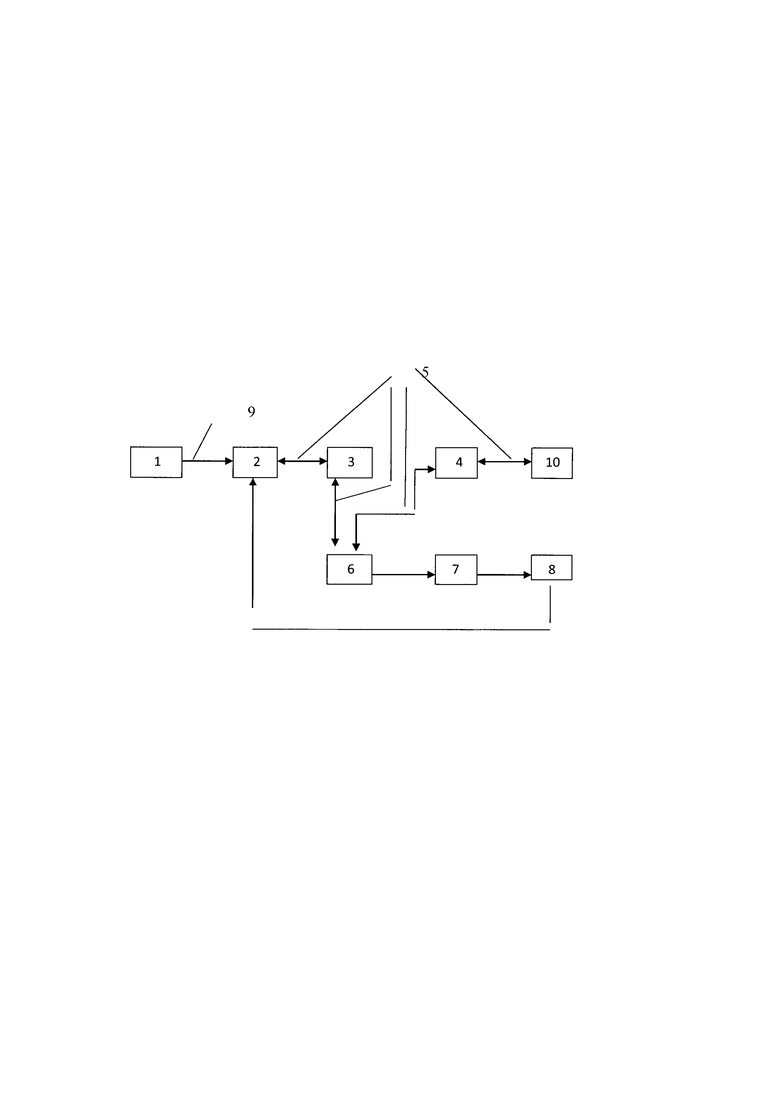
На чертеже представлена функциональная схема предлагаемого устройства. Устройство содержит электропривод 1, лебедку с контроллером 2, неподвижный ролик полиспаста 3, клюз для вывода кабеля 4, силовой кабель 5, подвижный ролик полиспаста 6, дозированную нагрузку 7, датчик 8, ремень 9 и преобразователь 10.
Устройство работает следующим образом. В исходном положении устройства (на земле), оголенную часть закрепленного началом на барабане кабеля 5 с помощью разъема в виде контактного кольца подключают к наземному источнику питания (на чертеже наземный источник не показан), а оголенную часть конца кабеля, прошедшего через отверстие клюза 4 - преобразователю 10, который далее совместно расположенными на раме летательного аппарата другими блоками (эти блоки на чертеже не показаны), обеспечивает электрическое питание летательного аппарата. После этого запускают летательный аппарат и одновременно с этим включают электропривод 1, который своим круговым движением, благодаря ремню 9, приводит во вращение барабана лебедки 2 с намотанным кабелем. По мере поднятья летательного аппарата вверх, кабель выходит от барабана лебедки вверх, огибает неподвижный ролик полиспаста 3, служащий для изменения направления движения кабеля, опускается вниз, огибает подвижный ролик полиспаста 6, дающий выигрыш в усилии, и далее поднимая вверх, проходит через отверстие клюза, служащего для вывода кабеля к летательному аппарату, и состоящего из четырех направляющих обрезиненных роликов. Подвижный ролик, имеющий свободный ход, для безынерционной намотки кабеля, дополнительно снабжается дозированной нагрузкой 7, снижающей нерегулируемую нагрузку на кабель и через нее соединяется с чувствительным элементом датчика 8, определяющего положение подвижного ролика по высоте. С выхода этого датчика информация о положении подвижного ролика поступает в микроконтроллер лебедки, который управляет скоростью и направлением вращения барабана лебедки через электропривод.
Согласно работе данного устройства положение подвижного ролика, фиксируемое датчиком, условно можно разделить на три зоны. Зона равновесия - режим покоя летательного аппарата стабильно висящего в заданной точке. В этом случае датчик передает информационный сигнал контроллеру лебедки о снижении электропотребления электропривода. Зона резкого взлета - передача сигнала датчиком контроллеру о запуске электропривода для размотки кабеля с барабана под действием тяги платформы и веса дозированной нагрузки. При этом чем выше поднимается подвижный ролик, тем быстрее проходит размотка силового кабеля. Зона резкого снижения - запуск электропривода контроллером для раскрутки барабана лебедки с возможностью намотки кабеля на барабан под действием веса дозированной нагрузки необходимой (определенной) скоростью. При этом чем ниже опускается подвижный ролик, тем быстрее вращается барабан и наоборот. Когда платформа с беспилотным аппаратом снижается, барабан продолжает вращение, подвижный ролик за счет укорочения ветви кабеля поднимается до максимальной высоты, и датчик дает команду контроллеру о наступлении режима равновесия.
При висении летательного аппарата на рабочей высоте возможны резкие короткие изменения положения летательного аппарата по высоте из-за воздействия воздушных потоков (порывы ветра, турбулентность), обусловливающие прослабление, резкое натяжение кабеля с последующим нарушением полета аппарата, вплоть до его падения. В данном техническом решении для исключения указанных нежелательных природных факторов, а также для плотной намотки кабеля на барабан без его запутывания, гарантирующих равномерную подачу силового кабеля при дрейфе летательного аппарата, предусмотрены следующие соображения. Если аппарат из-за дрейфа поднимается выше, кабель натягивается и подвижный ролик полиспаста, преодолевая массу дозированной нагрузки, переходит в зону размотки, и контроллер дает команду лебедке на разматывание кабеля с увеличением скорости в зависимости от изменения амплитуды отклонения от рабочей высоты. Если аппарат спускается вниз из-за дрейфа, кабель ослабляется, и подвижный ролик под действием дозированной нагрузки переходит в зону намотки, и контроллер дает команду лебедке на наматывание кабеля с увеличением скорости в зависимости от изменения амплитуды от рабочей высоты. В случае недостаточной скорости процедуры намотки/ размотки кабеля, подвижный ролик полиспаста переходит в аварийную зону намотки/размотки, и контроллер, благодаря информации от датчика об аварийной зоне (положение) подвижного ролика, обесточивает лебедку, т.е. формируется свободная процедура размотки/намотки кабеля с возникновением аварийной ситуации.
В рассматриваемо случае намотанный на барабан силовой кабель в зависимости от скорости поднятья вверх летательного аппарата, при отсутствии возмущающих природных факторов окружающей среды, постепенно (синхронно) разматывается. При спуске аппарата силовой кабель наматывается на барабан. При сигнале с земли об остановке аппарата в рабочей высоте или на земле, процесс размотки/намотки кабеля синхронно тоже останавливается.
Таким образом, в предлагаемом техническом решении на основе буферного накопления кабеля на барабан лебедки, компенсирующего рывковую подачу кабеля в момент его сильного прослаблеия/натяжения, а также регулируемого управления скоростью вращения барабана контроллером через электропривод, можно обеспечить расширение эксплуатационной возможности при подаче кабеля на летательный аппарат и спуске кабеля с него.
Данное устройство, помимо решения задачи подачи силового кабеля на летательный аппарат, успешно может быть использовано и при проведении монтажных работ, связанных с высоковольтными линиями передачи энергии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической намотки-размотки кабеля привязных БПЛА | 2023 |
|
RU2819974C1 |
| СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ ПРИВЯЗНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2782805C1 |
| Устройство для использования энергии рекуперации при питании двигателей привязного высотного беспилотного летательного аппарата | 2022 |
|
RU2792311C1 |
| Способ электропитания бортовой аппаратуры высотной привязной платформы, построенной беспилотным летательным аппаратом | 2024 |
|
RU2841215C1 |
| КАБЕЛЬНЫЙ БАРАБАН ДЛЯ НАМОТКИ-РАЗМОТКИ СИЛОВОГО КАБЕЛЯ | 2024 |
|
RU2835173C1 |
| Подводный лебедочный зонд | 2017 |
|
RU2642677C1 |
| Способ защиты наземных объектов от самонаводящихся на инфракрасное излучение высокоточных боеприпасов | 2018 |
|
RU2682144C1 |
| Способ определения высоты платформы из привязного беспилотного летательного аппарата | 2024 |
|
RU2831621C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ПРИВЯЗНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2009 |
|
RU2441809C2 |
Изобретение относится к отрасли беспилотной авиации, в частности кабелеподъемным и другим видам нагрузки устройствам, предназначенным для оперативной подачи силового кабеля электропитания на беспилотный летательный аппарат (БПЛА) и спуска кабеля с него. В устройство с полиспастом для подачи силового кабеля на привязной БПЛА введены дозированная нагрузка, лебедка с контроллером, клюз вывода кабеля, ремень и преобразователь. Вал электропривода ремнем соединен со шкивом барабана лебедки, осуществляющего смотку/размотку кабеля, закрепленного началом на барабане. Кабель огибает желоба неподвижного и подвижного роликов полиспаста и проходит через отверстие клюза. Конец прошедшего через отверстие клюза кабеля подключен к расположенному на раме БПЛА преобразователю, ось подвижного ролика через дозированную нагрузку соединен с чувствительным элементом датчика, служащего для определения положения подвижного ролика и передачи информации контроллеру лебедки, корпус датчика, клюз и ось неподвижного ролика закреплены на раме лебедки. Расширяются эксплуатационные возможности. 1 ил.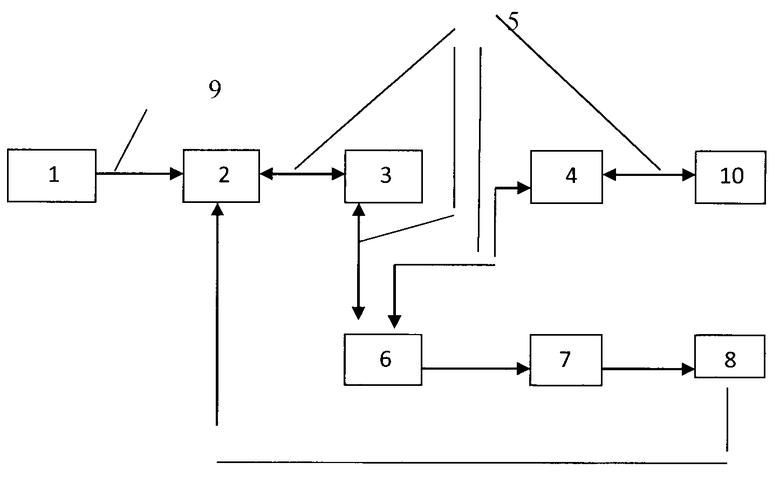
Устройство с полиспастом для подачи силового кабеля на привязной беспилотный летательный аппарат, содержащее кабель, датчик, электропривод, неподвижный и подвижный ролики полиспаста, отличающееся тем, что в него введены дозированная нагрузка, лебедка с контроллером, клюз вывода кабеля, ремень и преобразователь, при этом вал электропривода ремнем соединен со шкивом барабана лебедки, осуществляющего смотку/размотку кабеля, закрепленного началом на барабане, кабель огибает желоба неподвижного и подвижного роликов полиспаста и проходит через отверстие клюза, конец прошедшего через отверстие клюза кабеля подключен к расположенному на раме беспилотного летательного аппарата преобразователю, ось подвижного ролика через дозированную нагрузку соединен с чувствительным элементом датчика, служащего для определения положения подвижного ролика и передачи информации контроллеру лебедки, корпус датчика, клюз и ось неподвижного ролика закреплены на раме лебедки.
| СПОСОБ ЭЛЕКТРОСНАБЖЕНИЯ ПРИВЯЗНОГО АЭРОСТАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2449927C2 |
| WO 2018099870 A1, 07.06.2018 | |||
| УСТРОЙСТВО С ПОЛИСПАСТОМ ДЛЯ ПЕРЕМЕЩЕНИЯ СКВАЖИННЫХ ПРИБОРОВ ПОД ДОБЫЧНЫМ НАСОСОМ | 2012 |
|
RU2507372C1 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2429166C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЭЛЕКТРОКАБЕЛЯ НА СУДНО | 1990 |
|
RU2013293C1 |
| Механизм управления челюстями грейфера | 1975 |
|
SU1081115A1 |
| WO 2010012455 A1, 04.02.2010. | |||

