Группа изобретений относится к радиолокации и может использоваться для распознавания воздушных целей с помощью радиолокатора, использующего сверхширокополосный ЛЧМ зондирующий сигнал.
Известны способ и устройство (РЛС распознавания целей: пат. №2095825 Рос. Федерация. №96106040/09; заявл. 29.03.1996; опубл. 10.11.1997). Способ заключается в сравнении дальностного портрета с эталонным методом наличия импульсного отклика в определенном элементе разрешения.
Устройство для реализации данного способа содержит антенну и приемопередающий тракт, запоминающее устройство, банк эталонных импульсов в определенных элементах разрешения и устройство сравнения.
Недостатком этого способа и устройства для его осуществления является то, что при идентификации проверяется только факт наличия импульсного отклика в определенном элементе разрешения.
Известны также способ и устройство (Устройство идентификации воздушных объектов по структуре дальностного портрета: пат. №2513041 Рос. Федерация. №2012121473/07; заявл. 24.05.2012; опубл. 20.04.2014. Бюл. №11). Способ заключается в сравнении дальностного портрета с эталонным методом наличия импульсного отклика с учетом его амплитуды в определенном элементе разрешения.
Устройство для реализации данного способа также содержит антенну и приемопередающий тракт, многоразрядное запоминающее устройство, банк эталонных импульсов с учетом их амплитуды в определенных элементах разрешения и устройство сравнения.
Недостатком этого способа является то, что при идентификации не учитываются фазовые характеристики импульсных откликов в структуре дальностного портрета.
Недостатком этого устройства является то, что в базе данных должно содержаться большое количество эталонных портретов каждого класса разной амплитуды с учетом входных шумов, наличие которых при данном построении также приводит к увеличению базы данных. Это обусловлено тем, что при квантовании сигнала с шумами, последние при оптимальной обработке должны занимать три кванта (Фисенко В.Т., Фисенко Т.Ю. Компьютерная обработка и распознавание изображений: учеб. пособие. СПб: СПбГУ ИТМО, 2008. С. 40-42).
Техническим результатом группы изобретений является повышение достоверности идентификации воздушных объектов за счет оптимального накопления и определения усредненного отличия дальностного портрета с учетом шумов от эталонного портрета.
Указанный технический результат достигается тем, что в способе идентификации воздушных объектов по структуре дальностного портрета последовательным сравнением амплитуды дальностного портрета с эталонными портретами дополнительно сравнивается его фазовая характеристика с эталонными фазовыми характеристиками за счет квадратурной свертки в оптимальном накопителе. Выделяется максимальное значение модуля свертки, относительно которого симметрично суммируются выборки с противоположным знаком и усредняются. Превышение первого порога максимальным значением выделяет полезные сигналы на фоне шумов, а сравнение второго порога с усредненным значением идентифицирует совпадение дальностного портрета с эталоном.
В устройстве для осуществления способа указанный технический результат достигается тем, что в устройство идентификации воздушных объектов по структуре дальностного портрета, содержащее передатчик (ПрД), последовательно включенные антенну, антенный переключатель (АП), усилитель высокой частоты (УВЧ), смеситель (СМ), усилитель промежуточной частоты (УПЧ), а также аналого-цифровой преобразователь (АЦП), цифровой фильтр сжатия (ЦФС), основной гетеродин (О-Гет), цифровое устройство управления (ЦУУ), измеритель дальности и ракурса (ИДР), оперативно запоминающее устройство (ОЗУ), блок эталонных портретов (БЭП) и амплитудный детектор (АД) дополнительно введены цифровой приемник промежуточной частоты (ЦППЧ), вход которого соединен с выходом АЦП, а выход с входам ЦФС, последовательно включенные вспомогательный гетеродин (В-Гет), квадратурный умножитель (КвУ), второй вход которого соединен с выходом ЦФС, цифровой весовой фильтр (ЦВФ), выход которого соединен с входами ОЗУ и ИДР, устройство свертки сигналов эталона и портрета (СЭП), входы которого подключены к выходам ОЗУ и БЭП, а выход к АД, выход которого подключен к входу устройства выбора максимального значения (МАХ) и информационному входу блока среднего отклонения от симметрии (СОС), выход адреса максимального значения подключен к адресному входу СОС, а выход максимального значения к информационному входу порогового устройства обнаружения (ПУО), выход СОС подключен к информационному входу порогового устройства распознавания (ПУР), вход признака эталона которого подключен к БЭП, выходы ПУО и ПУР подключены к входам устройства принятия решений (УПР), выход которого является выходом устройства идентификации, при этом выход направления движения (ракурс) устройства ИДР подключен к БЭП, а выход дальности соединен с синхронизирующим входом ЦУУ, выходы которого подключены к управляющим входам О-Гет и В-Гет.
Поясним суть изобретения.
Согласно изобретению в зоне ожидания отраженного сверхширокополосного ЛЧМ сигнала по целеуказанию ИДР посредством ЦУУ на О-Гет поступает команда, по которой О-Гет формирует ЛЧМ сигнал. После ЛЧМ гетеродинирования совокупности отраженных ЛЧМ импульсов, отраженных от распознаваемой цели, у них частично снимается девиация, а центральные частоты смещаются по линейному закону (Щербаков B.C.. Корреляционно-фильтровой метод обработки сверхширокополосных ЛЧМ сигналов. Журнал радиоэлектроники. 2018. №2. Режим доступа: http://jre.cplire.ru/jre/feb18/11/text.pdf). Далее оцифрованный на ПЧ сигнал поступает в ЦППЧ, где выделяются квадратурные дискретные выборки (Справочник по радиолокации. / Под ред. М.И. Сколника. Пер. с англ. под общей ред. B.C. Вербы. В 2 книгах. Книга 2. Москва: Техносфера, 2014. С. 1274).
После обработки в ЦФС ЛЧМ сигналы сжимаются каждый на своей центральной частоте, и трансформируются по дистанции. Учитывая, что время обработки в тракте известно, формирование ЛЧМ сигналов в О-Гет и В-Гет синхронизировано, поэтому после квадратурного умножения частотные расстройки центральных частот сжатых ЛЧМ сигналов компенсируются, а в ЦВФ снижается уровень боковых лепестков сжатых ЛЧМ сигналов. Таким образом, выделяется структура дальностного портрета, в которой учтено амплитудно-фазовое распределение интенсивности блестящих точек по дальности для конкретной цели на определенном ракурсе. Эта информация записывается в ОЗУ для дальнейшей обработки.
Кроме этого, с ИДР информация о ракурсе цели поступает на БЭП, с которого последовательно считываются квадратурные эталоны всех целей данного ракурса и поступают на СЭП, где осуществляется квадратурная свертка их с дальностным портретом цели, начальная фаза которого неизвестна. В результате свертки сигнала с эталоном собственной копии на выходе СЭП, независимо от начальной фазы сигнала, будет максимальное отношение сигнал/шум, такая обработка называется оптимальной (Тихонов В.И. Оптимальный прием сигналов. М.: Радио и связь, 1983. с. 81, рис. 2.7). Кроме того, данная функция называется автокорреляционной и является симметричной относительно максимального значения (Трухачев А.А. Радиолокационные сигналы и их применение. М.: Воениздат, 2005. С. 108), а свертка сигнала с другим эталонным портретом не будет оптимальной и симметричной.
Последовательность сверток через АД поступает на МАХ и информационный вход СОС. Для каждого модуля свертки определяется максимальное значение и его адрес, при этом максимальное значение поступает на ПУО, а его адрес на адресный вход СОС, в котором относительно этого адреса выполняется симметричное вычитание и усреднение модуля этих значений. С выхода СОС усредненный результат вычитания симметричных значений поступает на информационный вход ПУР, а на другой вход с БЭП поступает код эталона. В результате сравнения в ПУР и ПУО формируются признаки, по которым в УПР принимается решение о идентификации дальностного портрета с определенным эталоном или отказ от идентификации, т.е. цель не определена. Результат идентификации может быть сформирован в виде символа или аббревиатуры, например Б - бомбардировщик, И - истребитель, Р - ракета и X - цель не определена, который отображается около душки распознаваемой цели и в формуляре.
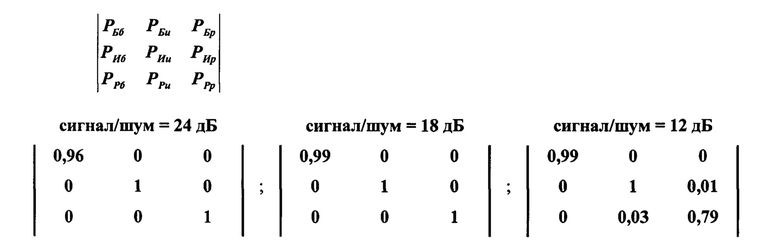
Согласно заявляемому способу с учетом амплитудно-фазового распределения интенсивности блестящих точек по дальности и ракурса распознаваемой цели методом моделирования выполнялась идентификация трех целей: бомбардировщик, истребитель и ракета, для разных отношений сигнал/шум: 24 дБ, 18 дБ и 12 дБ. При этом порог обнаружения задан на уровне 12 дБ, а порог распознавания из вероятности правильной идентификации Р = 0,9. Качество распознавания для каждого отношения сигнал/шум представлено в виде матрицы условных вероятностей, в каждом элементе которой расположены вероятности идентификации отраженного сигнала с соответствующим эталоном. В данном примере введены обозначения: прописными символами отмечены сигналы эталонов, а строчными сигналы, отраженные от соответствующих воздушных объектов с шумами.
Охарактеризованная указанными выше существенными признаками группа изобретений на дату подачи заявки не известна в Российской Федерации и за границей и отвечает требованиям критерия "новизна".
Заявителем не выявлены технические решения, имеющие признаки, совпадающие с совокупностями отличительных признаков заявляемых изобретений, обеспечивающих достижение заявляемого технического результата, в связи с чем, можно сделать вывод о соответствии изобретений условию патентоспособности "изобретательский уровень".
Изобретения могут быть реализованы промышленным способом с использованием известных технических средств, технологий и материалов и соответствуют требованиям условия патентоспособности "промышленная применимость".
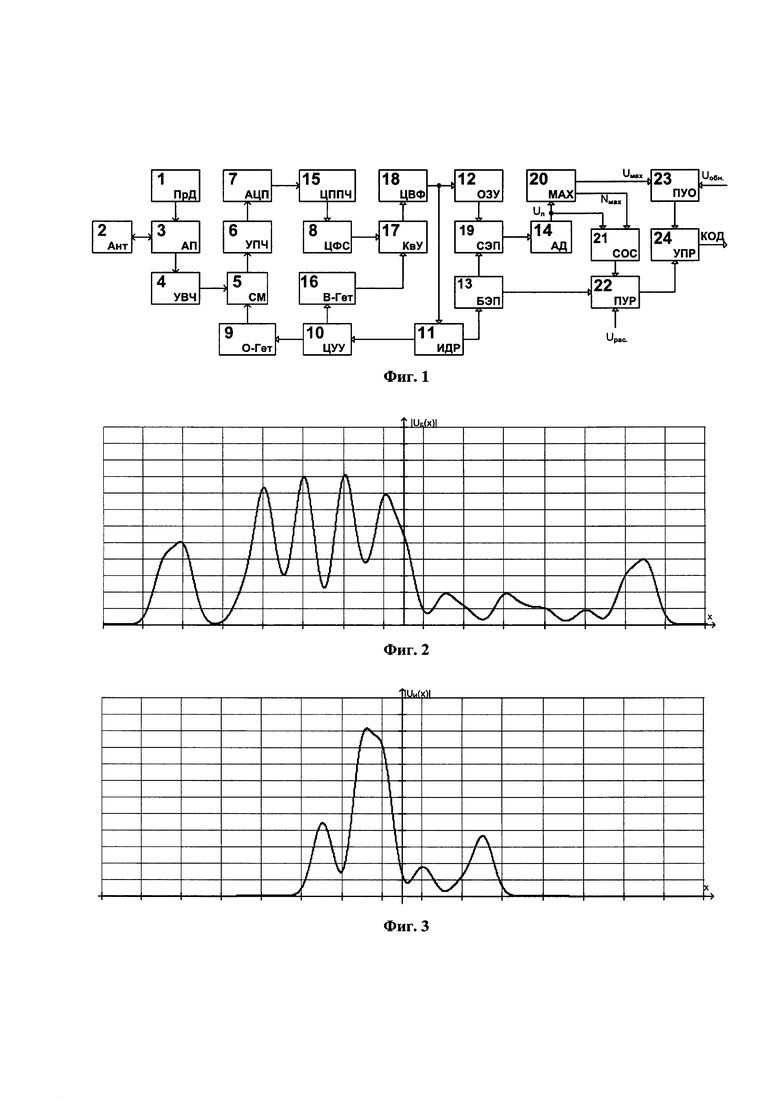
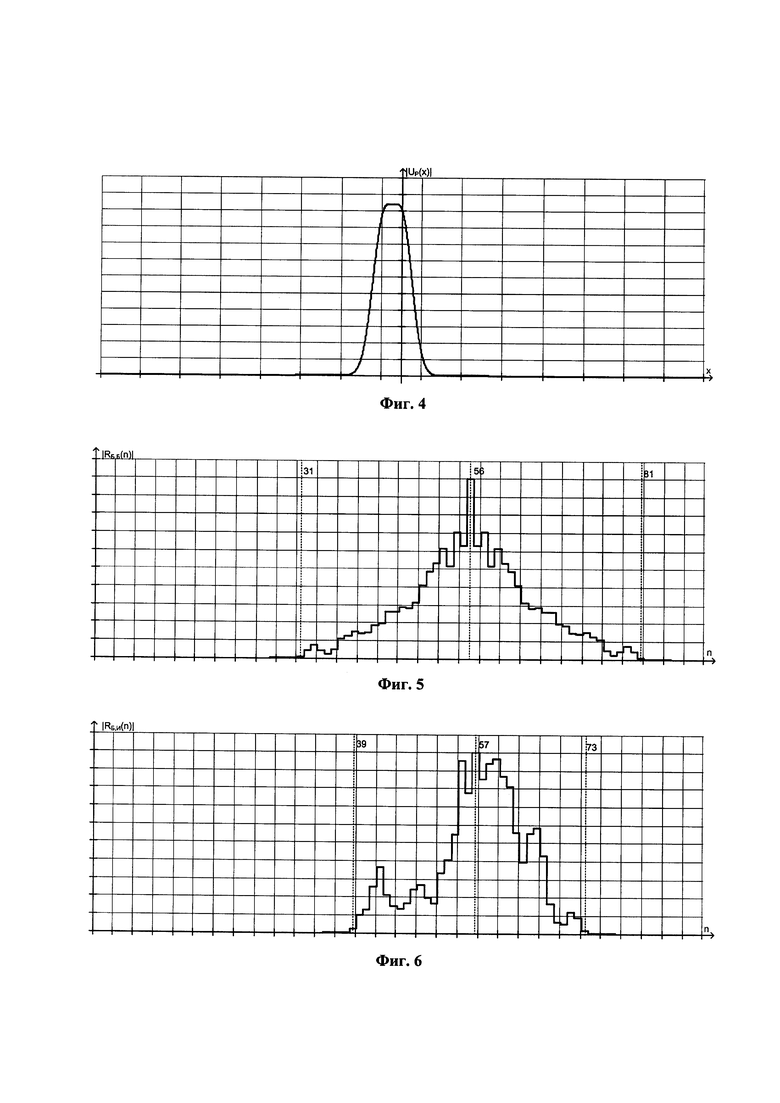
Изобретения поясняются графическими материалами, где на фиг. 1 изображена структурная схема идентификации воздушных объектов по структуре дальностного портрета, на фиг. 2, 3 и 4 условные модули амплитудно-фазовых распределений интенсивностей блестящих точек для бомбардировщика, истребителя и ракеты соответственно. На фиг. 5 модуль результата свертки сигнала, отраженного от бомбардировщика с собственной эталонной копией, а на фиг. 6 модуль результата свертки сигнала, отраженного от бомбардировщика с эталонной копией истребителя.
Устройство идентификации воздушных объектов по структуре дальностного портрета работает следующим образом. В передатчике 1 периодически формируется широкополосный ЛЧМ сигнал, который через антенный переключатель 3 и приемопередающую антенну 2 излучается в пространство. Совокупность отраженных сигналов от блестящих точек воздушного объекта, распределенных по дальности с соответствующими интенсивностями, в обратном порядке через антенну 1 и антенный переключатель 2 поступают на вход усилителя высокой частоты 4, где они усиливаются и поступают на первый вход смесителя 5. В это же время в зоне ожидания отраженного сигнала, в основном гетеродине 9 через цифровое устройство управления 10 по целеуказанию с измерителя дальности и ракурса 11 формируется широкополосный ЛЧМ сигнал, который перекрывает по длительности отраженный сигнал и поступает на второй вход смесителя 5. На выходе смесителя на промежуточной частоте выделяется совокупность отраженных ЛЧМ сигналов, у которых частично снята девиация, а центральные частоты смещены по линейному закону и поступают на вход усилителя промежуточной частоты 6. Усиленная совокупность ЛЧМ сигналов поступает на вход аналого-цифрового преобразователя 7, в котором осуществляется квантование дискретных выборок, и с его выхода поступает на вход цифрового приемника промежуточной частоты 15, в котором выделяются квадратурные составляющие. Квадратурные составляющие совокупности ЛЧМ сигналов поступают на вход цифрового фильтра сжатия 8, в котором осуществляется их трансформация по дистанции и сжатие, каждого на своей центральной частоте из-за смещения центральных частот в результате ЛЧМ гетеродинирования. Совокупность сжатых ЛЧМ сигналов поступает на первый вход квадратурного умножителя 17, на второй вход которого с вспомогательного гетеродина поступает ЛЧМ сигнал со знаком девиации, обратным частотным расстройкам сжатых ЛЧМ сигналов. В результате этого на выходе квадратурного умножителя совокупность сжатых ЛЧМ сигналов будут сосредоточены в одной полосе. Эти сигналы поступают на вход весового фильтра 18, в котором снижается уровень боковых лепестков сжатых ЛЧМ сигналов и ограничивается их полоса. Выделенные таким образом сигналы, с учетом амплитудно-фазового распределения интенсивности блестящих точек по дальности на известном ракурсе, записываются в оперативно-запоминающее устройство 12, с выхода которого синхронно с эталонами целей этого же ракурса поступают на входы свертки эталонов с портретами 19. Информация о ракурсе на вход блока эталонных портретов 13 поступает с измерителя дальности и ракурса 11. Результат свертки поступает на вход амплитудного детектора 14, в котором вычисляются модули сверток отраженного сигнала с каждым эталоном известного ракурса. При этом модуль результата свертки сигнала с собственной копией отвечает требованию оптимальной обработки и является симметричной функцией, как показано на фиг. 5 для бомбардировщика. В это же время модуль результата свертки сигнала, отраженного от бомбардировщика, с копией истребителя не является оптимальным, а функция не симметрична, как показано на фиг. 6. С выхода амплитудного детектора результаты сверток параллельно поступают на устройство выбора максимального значения 20 и блок среднего отклонения от симметрии 21. При этом выбранное максимальное значение Uмах поступает на вход порогового обнаружителя 23, а его адрес Nмах на адресный вход среднего отклонения от симметрии. В блоке среднего отклонения от симметрии относительно адреса максимального значения выполняется симметричное сложение выборок с противоположным знаком и усреднение их по модулю
Усредненный по модулю результат поступает на информационный вход порогового устройства распознавания 22, на другой его вход поступает код распознаваемого воздушного объекта. В пороговых устройствах 22 и 23 формируются признаки идентификации объекта и обнаружения соответственно, которые поступают на устройство принятия решений 24, с выхода которого выдается код объекта или невозможность его идентифицировать.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЛС распознавания целей | 2019 |
|
RU2720355C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ ПО СТРУКТУРЕ ДАЛЬНОСТНОГО ПОРТРЕТА | 2012 |
|
RU2513041C2 |
| РЛС РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2095825C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ | 2017 |
|
RU2657462C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С АДАПТИВНЫМ ВЫБОРОМ МОМЕНТА АНАЛИЗА ОТРАЖЕННОГО СИГНАЛА | 2008 |
|
RU2377596C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СИГНАЛОВ | 1996 |
|
RU2095826C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ ЗА ОДИН ПЕРИОД ИЗЛУЧЕНИЯ И ПРИЕМА ПАЧКИ РАДИОИМПУЛЬСОВ | 2021 |
|
RU2782574C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ, НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ И ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2011 |
|
RU2439611C1 |
| МНОГОЧАСТОТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ РАСПОЗНАВАНИЕМ ЦЕЛЕЙ | 2007 |
|
RU2358288C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
Группа изобретений относится к радиолокации и может использоваться для распознавания воздушных целей с помощью радиолокатора, использующего сверхширокополосный ЛЧМ зондирующий сигнал. Достигаемый технический результат - повышение достоверности идентификации воздушных объектов. Указанный результат достигается за счет того, что сравнение дальностного портрета с эталонным осуществляется с учетом амплитудно-фазового распределения интенсивности блестящих точек по дальности методом квадратурной свертки в оптимальном накопителе, определением максимального значения результата свертки и отклонения ее от симметрии. Устройство, реализующее способ, содержит передатчик, приемо-передающую антенну, антенный переключатель, усилитель высокой частоты, смеситель, усилитель промежуточной частоты, аналого-цифровой преобразователь, цифровой приемник промежуточной частоты, цифровой фильтр сжатия, квадратурный умножитель, цифровой весовой фильтр, основной гетеродин, вспомогательный гетеродин, цифровое устройство управления, оперативно запоминающее устройство, блок эталонных портретов, устройство свертки сигнала эталона с портретным сигналом, амплитудный детектор, устройство выбора максимального значения и его адреса, пороговое устройство обнаружения, блок среднего отклонения от симметрии, пороговое устройство распознавания и устройство принятия решений. 2 н.п. ф-лы, 6 ил.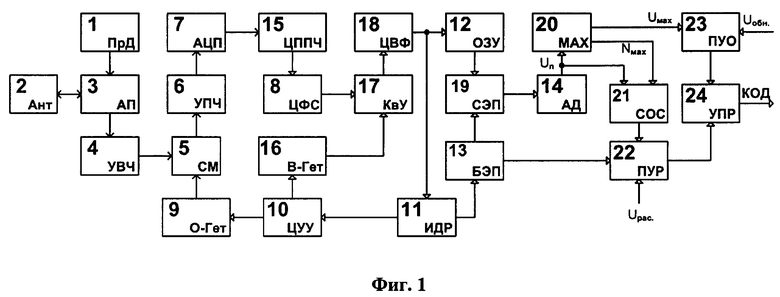
1. Способ идентификации воздушных объектов по структуре дальностного портрета последовательным сравнением амплитуды дальностного портрета с эталонными портретами, отличающийся тем, что выделяют структуру дальностного портрета, в которой учтено амплитудно-фазовое распределение по дальности для отраженного от воздушных объектов сигнала, осуществляют сравнение сигналов дальностного и эталонных портретов в квадратурном виде с учетом фаз амплитуд дальностного портрета посредством последовательных сверток дальностного портрета с эталонными портретами, для каждой из которых определяется максимальное значение, выделяющее полезные сигналы на фоне шумов, и усредненная разница модулей симметричных значений, идентифицирующая совпадение дальностного портрета с эталонным, после чего принимают решение об идентификации дальностного портрета воздушного объекта с определенным эталоном или об отказе от идентификации.
2. Устройство идентификации воздушных объектов по структуре дальностного портрета, содержащее передатчик (ПрД), последовательно включенные антенну, антенный переключатель (АП), усилитель высокой частоты (УВЧ), смеситель (СМ), усилитель промежуточной частоты (УПЧ), а также аналого-цифровой преобразователь (АЦП), цифровой фильтр сжатия (ЦФС), основной гетеродин (О-Гет), цифровое устройство управления (ЦУУ), измеритель дальности и ракурса (ИДР), оперативно запоминающее устройство (ОЗУ), блок эталонных портретов (БЭП) и амплитудный детектор (АД), отличающееся тем, что в его состав введены цифровой приемник промежуточной частоты (ЦППЧ), вход которого соединен с выходом АЦП, а выход с входом ЦФС, последовательно включенные вспомогательный гетеродин (В-Гет), квадратурный умножитель (КвУ), второй вход которого соединен с выходом ЦФС, цифровой весовой фильтр (ЦВФ), выход которого соединен с входами ОЗУ и ИДР, устройство свертки сигналов эталона и портрета (СЭП), входы которого подключены к выходам ОЗУ и БЭП, а выход к АД, выход которого подключен к входу устройства выбора максимального значения (МАХ) и информационному входу среднего отклонения от симметрии (СОС), выход адреса максимального значения подключен к адресному входу СОС, а выход максимального значения к информационному входу порогового устройства обнаружения (ПУО), выход СОС подключен к информационному входу порогового устройства распознавания (ПУР), вход признака эталона которого подключен к БЭП, выходы ПУО и ПУР подключены к входам устройства принятия решений (УПР), выход которого является выходом устройства идентификации, при этом выход направления движения (ракурс) устройства ИДР подключен к БЭП, а выход дальности соединен с синхронизирующим входом ЦУУ, выходы которого подключены к управляющим входам О-Гет и В-Гет.
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ ПО СТРУКТУРЕ ДАЛЬНОСТНОГО ПОРТРЕТА | 2012 |
|
RU2513041C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ВЫЯВЛЕНИЯ ЗАКОНА ИЗМЕНЕНИЯ УГЛОВОЙ СКОРОСТИ ПОВОРОТА СОПРОВОЖДАЕМОГО ВОЗДУШНОГО ОБЪЕКТА ПО ПОСЛЕДОВАТЕЛЬНО ПРИНЯТЫМ ОТРАЖЕНИЯМ СИГНАЛОВ С ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ | 2013 |
|
RU2525829C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ ПО СТРУКТУРЕ ДАЛЬНОСТНОГО ПОРТРЕТА | 2012 |
|
RU2513041C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С АДАПТИВНЫМ ВЫБОРОМ МОМЕНТА АНАЛИЗА ОТРАЖЕННОГО СИГНАЛА | 2008 |
|
RU2377596C1 |
| US 7049999 B1, 23.06.2006 | |||
| JP 2010038744 A, 18.02.2010 | |||
| US 5559515 A, 24.09.1996 | |||
| JP 4711305 B2, 20.06.2011. | |||

