Изобретение относится к области гидроакустики и геоинформационных технологий. Оно может быть использовано для построения систем обнаружения и, в частности, для повышения точности определения объектов в прибрежной зоне.
Известны способы обнаружения объектов, включающие излучение зондирующего сигнала, прием эхосигнала гидролокатора на фоне шумов, преобразование акустического сигнала в электрический гидроакустической антенной, определение энергетического спектра электрического процесса, представляющего собой смесь электрического сигнала и нормальной стационарной шумовой помехи.
Такой способ изложен в работе [Евтютова А.П., Митько В.Б. Примеры инженерных расчетов в гидроакустике. - Судостроение. - 1981. с. 77]. Способ содержит спектральный анализ этого процесса, детектирование его спектральных составляющих, интегрирование огибающей и обнаружение сигнала при сравнении с порогом и при превышении принятым эхосигналом выбранного порога принятия решения об обнаружении объекта.
При этом под спектральным анализом понимают, как правило, полосовую фильтрацию, выделяющую основную энергию электрического процесса. При использовании цифровой техники в качестве спектрального анализа применяют процедуры быстрого преобразования Фурье (БПФ), которые обеспечивают выделение и измерение энергетического спектра шумового электрического процесса. [Применение цифровой обработки сигналов. - Мир. - 1990. - 296 с.].
Известен аналогичный способ обнаружения эхосигнала [Бурдика B.C. Анализ гидроакустических систем. - Судостроение. - 1988. - 347 с.], который содержит многоканальную по частоте фильтрацию, детектирование, выделение огибающей и сравнение с порогом. По каналу с максимальной амплитудой сигнала, по частоте определяется смещение спектра, которое пропорционально радиальной скорости цели, а по моменту превышения выбранного порога принимается решение об обнаружении объекта. Описанный способ обнаружения объектов является наиболее близким по функциональным и техническим характеристикам и был выбран в качестве прототипа.
Недостатком данных способов обнаружения, в том числе и выбранного прототипа, является то, что при гидролокации в прибрежной зоне возникает ярко выраженное отражение зондирующего сигнала от береговой линии и дна на мелководье. Указанное отражение, создавая маскирующую помеху, значительно снижает эффективность обнаружения объекта в прибрежной зоне. Данный фактор создает практические погрешности в реализации приведенных выше способов гидроакустического обнаружения объекта.
Задачей предлагаемого изобретения является повышение эффективности гидролокационного обнаружения объекта в прибрежной зоне.
Технический результат изобретения заключается в снижении помех при гидролокационном обнаружении объекта в прибрежной зоне.
Для обеспечения заявленного технического результата в гидролокационный способ обнаружения, включающий излучение зондирующего сигнала, прием эхосигнала, многоканальную по частоте фильтрацию, детектирование, выделение огибающей и сравнение с порогом и при превышении принятым эхосигналом выбранного порога принятие решения об обнаружении объекта, предлагается ввести временные характеристики, регулирующие работу приемного тракта. Временные характеристики рассчитываются на основе данных о местоположении береговой черты и изменении глубины дна, полученных с помощью геоинформационных систем. Для этого после излучения зондирующего сигнала в момент времени  где t1 - момент времени излучения сигнала, Dближ - дистанция до ближайшей точки береговой черты (изобаты), С - скорость звука в воде (как правило, используется средняя скорость звука или скорость звука на горизонте излучения), работу приемного тракта прекращают на время
где t1 - момент времени излучения сигнала, Dближ - дистанция до ближайшей точки береговой черты (изобаты), С - скорость звука в воде (как правило, используется средняя скорость звука или скорость звука на горизонте излучения), работу приемного тракта прекращают на время  и возобновляют его работу в момент времени
и возобновляют его работу в момент времени  где Dдаль - дистанция до дальней точки береговой черты (изобаты), а значения Dближ и Dдаль определяют за счет использования априори известных данных о дистанциях до берега и глубинах из геоинформационных систем. Такие системы содержат цифровую информацию о геопространстве в форме соответствующих баз данных и позволяют построить сетку дистанций с учетом прагматики глубин. Сетка представляет собой цифровую модель поверхности, в основу которой положена сеть точек, каждой из которых сопоставлено значение уровня поля в этой точке, причем точки расположены в определенной регулярной форме и задан способ вычисления значений уровней между узлами сетки.
где Dдаль - дистанция до дальней точки береговой черты (изобаты), а значения Dближ и Dдаль определяют за счет использования априори известных данных о дистанциях до берега и глубинах из геоинформационных систем. Такие системы содержат цифровую информацию о геопространстве в форме соответствующих баз данных и позволяют построить сетку дистанций с учетом прагматики глубин. Сетка представляет собой цифровую модель поверхности, в основу которой положена сеть точек, каждой из которых сопоставлено значение уровня поля в этой точке, причем точки расположены в определенной регулярной форме и задан способ вычисления значений уровней между узлами сетки.
Предложенный способ позволяет отсечь ярко выраженное отражение зондирующего сигнала от береговой линии и дна на мелководье, маскирующее эхосигнал от наблюдаемого объекта, что снижает уровень помех и повышает эффективность обнаружения.
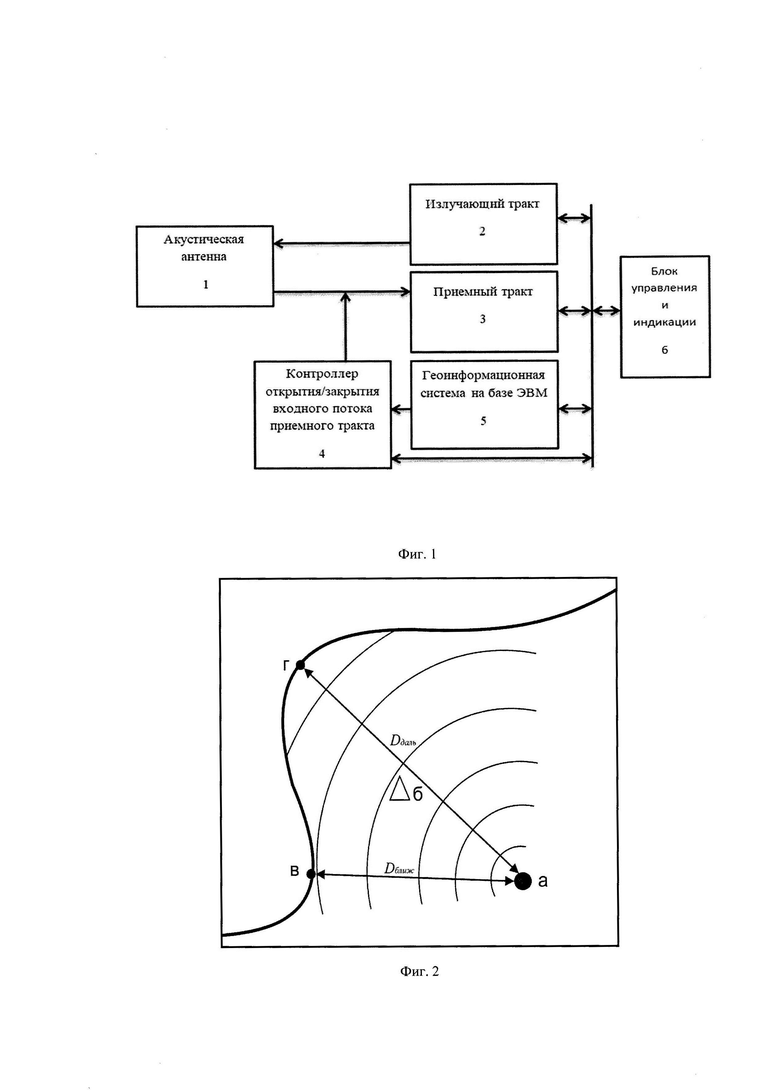
Сущность изобретения поясняется фиг. 1 и фиг. 2, где фиг. 1 - блок-схема устройства, реализующего предлагаемый способ, фиг. 2 - графическое пояснение к способу.
Графическое пояснение к способу (фиг. 2) иллюстрирует прибрежную зону и содержит гидролокатор (а), объект обнаружения (б), ближайшую точку береговой черты (в), дальнюю точку береговой черты (г).
Устройство (фиг. 1), реализующее способ, содержит гидроакустическую антенну 1, излучающий тракт 2, приемный тракт 3, контроллер открытия/закрытия входного потока приемного тракта 4, геоинформационную систему на базе ЭВМ 5, блок управления и индикации 6.
Гидроакустическая антенна 1 соединена с выходом излучающего тракта 2 и входом приемного тракта 3. Контроллер открытия/закрытия входного потока приемного тракта соединен со входом приемного тракта ГАК 3 и выходом геоинформационной системы на базе ЭВМ 5. Входы и выходы устройств 2…5 соединены с входом и выходом блока управления и индикации 6.
Блоки 1, 2, 3 являются известными устройствами и достаточно подробно изложены в литературе по гидроакустике [Колчеданцев А.С. Гидроакустические станции. - Судостроение. - 1982; Справочник по гидроакустике. - Судостроение. - 1988].
Блок 4 является спецпроцессором и работает по жесткой логике управления на основании данных из блока 5, открывая/закрывая входной поток приемного тракта 3.
Блок 5 реализуется на ЭВМ и содержит цифровую информацию о геопространстве в форме соответствующих баз данных и позволяет определить дистанцию до необходимых точек береговой черты (изобаты).
Блок 6 содержит органы управления устройством и индикаторные устройства для отображения сигналов, поступающих с выхода приемного тракта.
С помощью устройства способ реализуется следующим образом. При гидролокации в прибрежной зоне, по команде из блока управления и индикации 6, в момент времени t1 происходит излучение гидроакустической антенной 1 зондирующего сигнала, формируемого излучающим трактом 2. По команде из блока управления и индикации 6, данные из геоинформационной системы на базе ЭВМ 5 передаются на контроллер открытия/закрытия входного потока 4, который по этим данным определяет время работы приемного тракта 3 по заданным формулам расчета временных характеристик. Данные из геоинформационной системы на базе ЭВМ 5 содержат информацию о дистанциях до ближней и дальней точек береговой черты (изобаты) в зоне излучения сигнала. Прием эхосигнала происходит до момента, пока контроллер 4 не закроет входной поток приемного тракта 3 в момент времени t2, когда отражение от ближней точки береговой черты (изобаты) начнет создавать ярко выраженное отражение, маскирующее эхосигнал гидролокатора. Момент времени рассчитывается по формуле  где Dближ - дистанция от гидролокатора (а) до ближайшей точки береговой черты (в) (фиг. 2), С - скорость звука в воде. Контроллер 4 открывает входной поток приемного тракта 3 в момент времени t3, когда отражение от дальней точки береговой черты (изобаты) в зоне излучения сигнала перестанет создавать маскирующую помеху. Момент времени рассчитывается по форме
где Dближ - дистанция от гидролокатора (а) до ближайшей точки береговой черты (в) (фиг. 2), С - скорость звука в воде. Контроллер 4 открывает входной поток приемного тракта 3 в момент времени t3, когда отражение от дальней точки береговой черты (изобаты) в зоне излучения сигнала перестанет создавать маскирующую помеху. Момент времени рассчитывается по форме  где Dдаль - дистанция от гидролокатора (а) до дальней точки береговой черты (г) (фиг. 2). Принятый в промежуток времени Тприем=t2-t1 эхосигнал в приемном тракте 3 проходит многоканальную по частоте фильтрацию, детектирование, выделение огибающей и сравнение с порогом, и при превышении принятым эхосигналом выбранного порога принимается решение об обнаружении объекта (б). Результат поступает на блок управления и индикации 6.
где Dдаль - дистанция от гидролокатора (а) до дальней точки береговой черты (г) (фиг. 2). Принятый в промежуток времени Тприем=t2-t1 эхосигнал в приемном тракте 3 проходит многоканальную по частоте фильтрацию, детектирование, выделение огибающей и сравнение с порогом, и при превышении принятым эхосигналом выбранного порога принимается решение об обнаружении объекта (б). Результат поступает на блок управления и индикации 6.
Без реализации данного способа помеха, маскирующая эхосигнал гидролокатора от наблюдаемого объекта, создала бы практические погрешности в реализации способов гидроакустического обнаружения объектов в прибрежной зоне.
Предлагаемое решение позволяет считать поставленную задачу повышения эффективности гидролокационного обнаружения в прибрежной зоне выполненной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2016 |
|
RU2634787C1 |
| Способ обработки гидролокационной информации | 2018 |
|
RU2694269C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529441C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2019 |
|
RU2736097C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2016 |
|
RU2625041C1 |
| Активный гидролокатор | 2017 |
|
RU2654366C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ С ИСПОЛЬЗОВАНИЕМ ВЗРЫВНОГО СИГНАЛА | 2013 |
|
RU2546852C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ГИДРОЛОКАТОРОМ | 2014 |
|
RU2571432C1 |
Использование: изобретение относится к области гидроакустики и геоинформационных технологий. Оно может быть использовано для построения систем обнаружения и, в частности, для повышения точности определения объектов в прибрежной зоне. Сущность: предложен гидролокационный способ обнаружения объектов, в котором после излучения зондирующего сигнала в момент времени  , где t1 - момент времени излучения сигнала, Dближ - дистанция до ближайшей точки береговой черты, С - скорость звука в воде, работу приемного тракта прекращают на время
, где t1 - момент времени излучения сигнала, Dближ - дистанция до ближайшей точки береговой черты, С - скорость звука в воде, работу приемного тракта прекращают на время  , и возобновляют его работу в момент времени
, и возобновляют его работу в момент времени , где Dдаль - дистанция до дальней точки береговой черты, а значения Dближ и Dдаль определяют за счет использования априори известных данных о дистанциях до берега и глубинах из геоинформационных систем. Технический результат: снижение помех на входе приемника в условиях гидролокационного обнаружения объекта в прибрежной зоне. 2 ил.
, где Dдаль - дистанция до дальней точки береговой черты, а значения Dближ и Dдаль определяют за счет использования априори известных данных о дистанциях до берега и глубинах из геоинформационных систем. Технический результат: снижение помех на входе приемника в условиях гидролокационного обнаружения объекта в прибрежной зоне. 2 ил.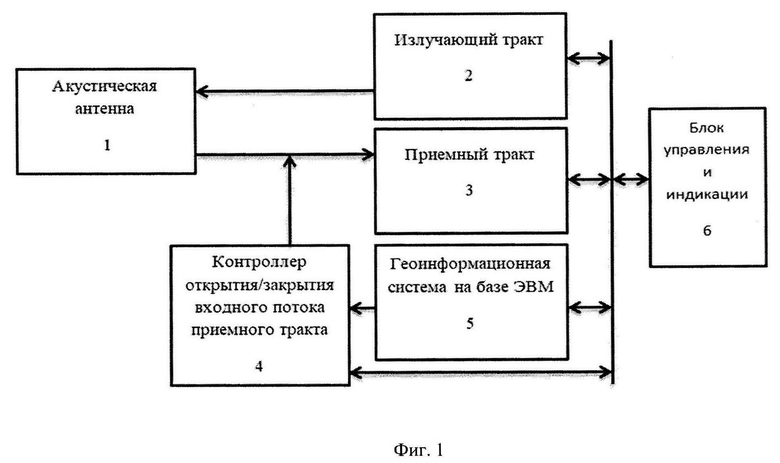
Гидролокационный способ обнаружения объектов в прибрежной зоне, включающий излучение зондирующего сигнала, прием эхосигнала, многоканальную по частоте фильтрацию, детектирование, выделение огибающей и сравнение с порогом принятого эхосигнала приемным трактом гидролокатора и при превышении принятым эхосигналом выбранного порога принятие решения об обнаружении объекта, отличающийся тем, что после излучения зондирующего сигнала в момент времени  , где t1- момент времени излучения сигнала, Dближ - дистанция до ближайшей точки береговой черты, С - скорость звука в воде, работу приемного тракта прекращают на время
, где t1- момент времени излучения сигнала, Dближ - дистанция до ближайшей точки береговой черты, С - скорость звука в воде, работу приемного тракта прекращают на время  и возобновляют его работу в момент времени
и возобновляют его работу в момент времени  , где Dдаль - дистанция до дальней точки береговой черты, а значения Dближ и Dдаль определяют за счет использования априори известных данных о дистанциях до берега и глубинах из геоинформационных систем.
, где Dдаль - дистанция до дальней точки береговой черты, а значения Dближ и Dдаль определяют за счет использования априори известных данных о дистанциях до берега и глубинах из геоинформационных систем.
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2011 |
|
RU2460088C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2016 |
|
RU2634787C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2724245C1 |
| Способ обработки и классификации гидролокационной информации | 2019 |
|
RU2725517C1 |
| Гидролокационный способ классификации с использованием псевдошумового сигнала | 2020 |
|
RU2735929C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| JP 2009250616 A, 29.10.2009. | |||

