Ссылка на родственные заявки
Настоящее раскрытие изобретения основано на заявке на патент Китайской Народной Республики № 202210142832.1, поданной 16 февраля 2022 г., которая полностью включена в настоящую заявку посредством ссылки, и испрашивает приоритет этой заявки.
Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к области трехмерного воспроизведения угольных шахт и, в частности, к системе и способу трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых.
Предшествующий уровень техники настоящего изобретения
В настоящее время для трехмерного воспроизведения подземной среды угольной шахты с целью сбора информации о среде, как правило, применяют лазерный радар или устройство глубинной камеры в сочетании с устройством инерциальной навигации с тем, чтобы создать карту облака точек с целью трехмерного воспроизведения.
Однако информация, полученная путем измерения только при помощи лазерного радара, представляет собой информацию о местоположении сканируемого объекта и не содержит цветовой RGB-информации о текстуре поверхности объекта, то есть, с применением лазерного радара для сканирования среды можно построить только карту облака точек с информацией о местоположении, и человеческому глазу сложно определить объект поисков на карте облака точек, особенно в условиях угольной шахты. Помимо того, что для построения карты облака точек необходимо использовать данные о глубине, также очень важно выполнять наблюдения объекта в среде в режиме реального времени. Несмотря на то, что цветное глубинное изображение для трехмерного воспроизведения может быть построено с применением устройства глубинной камеры, на него существенно влияет освещение, а точность собранных данных облака точек обычно ухудшается средой, это в конечном итоге приводит к большим отличиям между созданным изображением и реальным изображением.
Краткое раскрытие настоящего изобретения
Настоящее изобретение по меньшей мере в некоторой степени направлено на решение одной из технических проблем предшествующего уровня техники.
Таким образом, настоящее изобретение обеспечивает систему и способ трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых, чтобы добавлять RGB-информацию к облаку точек при построении облака точек, и воспроизводить реальную картину сканируемой среды, тем самым решают проблему, связанную со сложностью определения объектов на забое угольной шахты.
Согласно первому аспекту предложена система трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых, которая содержит первый многочастотный лазерный радар, второй многочастотный лазерный радар, держатель лазерных радаров, панорамную камеру, устройство инерциальной навигации и компьютер для обработки данных. Первый многочастотный лазерный радар расположен на держателе лазерных радаров и ориентирован в горизонтальном направлении, а второй многочастотный лазерный радар расположен на держателе лазерных радаров в направлении под прямым углом к первому многочастотному лазерному радару. Панорамная камера расположена над первым многочастотным лазерным радаром. Устройство инерциальной навигации расположено под держателем лазерных радаров в месте расположения первого многочастотного лазерного радара. Компьютер для обработки данных расположен под держателем лазерных радаров и соответственно соединен с первым многочастотным лазерным радаром, вторым многочастотным лазерным радаром, панорамной камерой и устройством инерциальной навигации.
В предпочтительном варианте осуществления система трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых содержит основание панорамной камеры, держатель устройства инерциальной навигации и держатель компьютера для обработки данных. Панорамная камера расположена над первым многочастотным лазерным радаром на основании панорамной камеры. Устройство инерциальной навигации расположено на держателе устройства инерциальной навигации под держателем лазерных радаров в месте расположения первого многочастотного лазерного радара. Компьютер для обработки данных расположен под держателем лазерных радаров на держателе компьютера для обработки данных.
Согласно предпочтительному варианту осуществления вертикальные углы обзора первого многочастотного лазерного радара и второго многочастотного лазерного радара составляют ±15 градусов, а горизонтальные углы обзора первого многочастотного лазерного радара и второго многочастотного лазерного радара составляют 360 градусов.
Согласно предпочтительному варианту осуществления первый многочастотный лазерный радар и второй многочастотный лазерный радар рассчитаны на сбор трехмерной геологической информации о забое угольной шахты и отправку собранной трехмерной геологической информации о забое угольной шахты на компьютер для обработки данных. Панорамная камера представляет собой панорамную камеру со сферическим углом обзора 360 градусов, она рассчитана на сбор информации о цвете забоя угольной шахты и отправку собранной информации о цвете забоя угольной шахты на компьютер для обработки данных. Устройство инерциальной навигации рассчитано на сбор в режиме реального времени пространственной информации о степени свободы держателя лазерных радаров и отправку собранной пространственной информации о степени свободы держателя лазерных радаров на компьютер для обработки данных. Компьютер для обработки данных рассчитан на получение трехмерной геологической информации и информации о цвете забоя угольной шахты, а также пространственной информации о степени свободы держателя лазерных радаров, и воспроизведение трехмерной информации с лазера об облаке точек забоя угольной шахты на основе полученной информации.
Кроме того, воспроизведение трехмерной информации с лазера об облаке точек забоя угольной шахты на основе полученной информации включает в себя: получение внешней матрицы между первым многочастотным лазерным радаром и вторым многочастотным лазерным радаром, а также внешней матрицы между первым многочастотным лазерным радаром и устройством инерциальной навигации, и определение трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из внешних матриц; обработку для компенсации искажений трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из пространственной информации о степени свободы держателя лазерных радаров, собранной устройством инерциальной навигации, для получения информации об облаке точек после обработки для компенсации искажений; преобразование информации об облаке точек после обработки для компенсации искажений и собранной информации о цвете к единой системе координат с последующим добавлением информации о цвете в соответствующее местоположение в облаке точек для получения воспроизведенной трехмерной информации с лазера об облаке точек, относящейся к забою угольной шахты.
Кроме того, определение трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из внешних матриц, включает в себя: преобразование трехмерной геологической информации о забое угольной шахты, собранной вторым многочастотным лазерным радаром, в систему координат, соответствующую первому многочастотному лазерному радару, исходя из внешней матрицы между первым многочастотным лазерным радаром и вторым многочастотным лазерным радаром;
преобразование собранной пространственной информации о степени свободы держателя лазерных радаров в систему координат, соответствующую первому многочастотному лазерному радару, исходя из внешней матрицы между первым многочастотным лазерным радаром и устройством инерциальной навигации; получение информации об облаке точек в системе координат, соответствующей первому многочастотному лазерному радару, после преобразования, в качестве трехмерной информации с лазера об облаке точек, относящейся к забою угольной шахты.
Кроме того, выполнение обработки для компенсации искажений трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из пространственной информации о степени свободы держателя лазерных радаров, собранной устройством инерциальной навигации, включает в себя: вычисление пространственного положения по собранной пространственной информации о степени свободы держателя лазерных радаров с применением расширенного алгоритма фильтрации Калмана для получения результата вычисления пространственного положения; относительное преобразование точек в каждом блоке облака точек из трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, в систему координат на момент определения местоположения первой точки блока облака точек.
Согласно второму аспекту, предложен способ трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых, который включает в себя: сбор трехмерной геологической информации и информации о цвете забоя угольной шахты и пространственной информации о степени свободы держателя лазерных радаров, и получение внешней матрицы между первым многочастотным лазерным радаром и вторым многочастотным лазерным радаром, а также внешней матрицы между первым многочастотным лазерным радаром и устройством инерциальной навигации; определение трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из собранной трехмерной геологической информации и информации о цвете забоя угольной шахты, а также внешней матрицы между первым многочастотным лазерным радаром и вторым многочастотным лазерным радаром и внешней матрицы между первым многочастотным лазерным радаром и устройством инерциальной навигации; выполнение обработки для компенсации искажений в трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, путем использования собранной пространственной информации о степени свободы держателя лазерных радаров с целью получения информации об облаке точек после обработки для компенсации искажений; преобразование информации об облаке точек после обработки для компенсации искажений и собранной информации о цвете к единой системе координат с последующим добавлением информации о цвете в соответствующее местоположение в облаке точек для получения воспроизведенной трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты.
В предпочтительном варианте осуществления определение трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из собранной трехмерной геологической информации и информации о цвете забоя угольной шахты, а также внешней матрицы между первым многочастотным лазерным радаром и вторым многочастотным лазерным радаром и внешней матрицы между первым многочастотным лазерным радаром и устройством инерциальной навигации, включает в себя: преобразование трехмерной геологической информации о забое угольной шахты, собранной вторым многочастотным лазерным радаром, в систему координат, соответствующую первому многочастотному лазерному радару, исходя из внешней матрицы между первым многочастотным лазерным радаром и вторым многочастотным лазерным радаром; преобразование собранной пространственной информации о степени свободы держателя лазерных радаров в систему координат, соответствующую первому многочастотному лазерному радару, исходя из внешней матрицы между первым многочастотным лазерным радаром и устройством инерциальной навигации; получение информации об облаке точек в системе координат, соответствующей первому многочастотному лазерному радару, после преобразования, в качестве трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты.
Согласно предпочтительному варианту осуществления выполнение обработки для компенсации искажений трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, с использованием собранной пространственной информации о степени свободы держателя лазерных радаров, включает в себя: вычисление пространственного положения по собранной пространственной информации о степени свободы держателя лазерных радаров с применением расширенного алгоритма фильтрации Калмана для получения результата вычисления пространственного положения; относительное преобразование точек в каждом блоке облака точек из трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, в систему координат на момент определения местоположения первой точки блока облака точек.
Техническое решение, обеспечиваемое вариантами осуществления настоящего изобретения, может содержать следующие преимущества.
Собирают трехмерную геологическую информацию и информацию о цвете забоя угольной шахты и пространственную информацию о степени свободы держателя лазерных радаров, и получают внешнюю матрицу между первым многочастотным радаром и вторым многочастотным радаром, а также внешнюю матрицу между первым многочастотным радаром и устройством инерциальной навигации. Трехмерную информацию с лазера об облаке точек, относящихся к забою угольной шахты, определяют исходя из собранной трехмерной геологической информации и информации о цвете забоя угольной шахты, а также полученной внешней матрицы между первым многочастотным радаром и вторым многочастотным радаром и полученной внешней матрицы между первым многочастотным радаром и устройством инерциальной навигации. Для получения информации об облаке точек после обработки для компенсации искажений выполняют обработку для компенсации искажений в трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, с применением собранной пространственной информации о степени свободы держателя лазерных радаров. Информацию об облаке точек после обработки для компенсации искажений и собранную информацию о цвете преобразуют в единую систему координат и затем информацию о цвете добавляют в соответствующее местоположение облака точек для получения воспроизведенной трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты. Таким образом, в системе и способе трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых согласно вариантам осуществления настоящего изобретения RGB-информацию добавляют к облаку точек при построении облака точек и воспроизводят реальную картину сканируемой среды, тем самым решают проблему, связанную со сложностью определения объектов на забое угольной шахты.
Краткое описание фигур
Для более четкого объяснения технических решений согласно вариантам осуществления настоящего изобретения или предшествующего уровня техники, ниже описаны чертежи, необходимые согласно вариантам осуществления настоящего изобретения или предшествующему уровню техники.
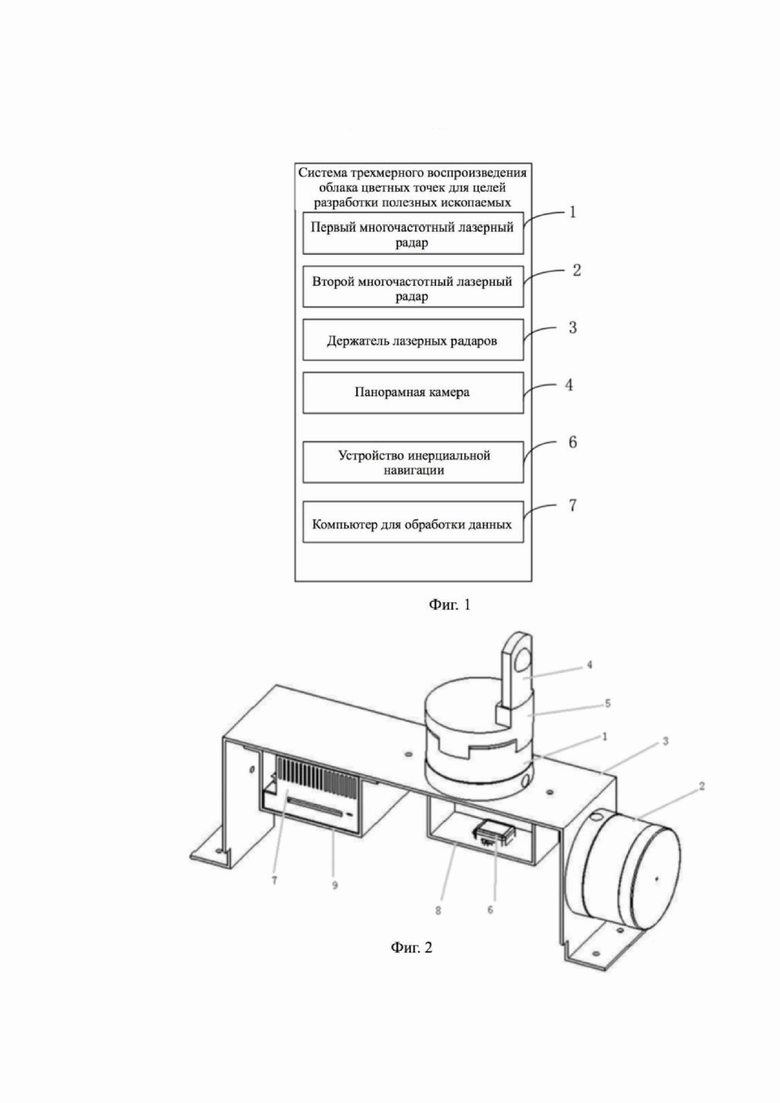
На фиг. 1 представлена структурная схема системы трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых согласно одному варианту осуществления настоящего изобретения.
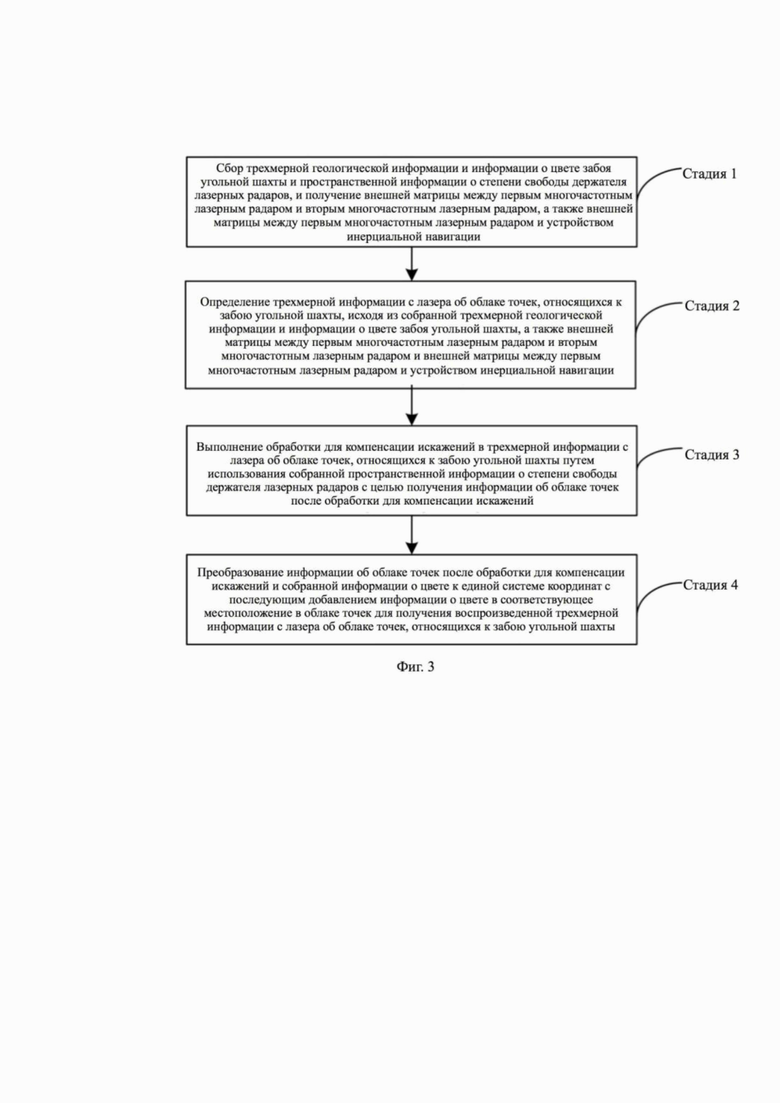
На фиг. 2 представлена структура системы трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых, включающая в себя держатель устройства инерциальной навигации согласно одному варианту осуществления настоящего изобретения.
На фиг. 3 представлена блок-схема способа трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых согласно одному варианту осуществления настоящего изобретения.
Цифровые обозначения позиций:
первый многочастотный лазерный радар 1, второй многочастотный лазерный радар 2, держатель 3 лазерных радаров, панорамная камера 4, основание 5 панорамной камеры, устройство 6 инерциальной навигации, компьютер 7 для обработки данных, держатель 8 устройства инерциальной навигации, держатель 9 компьютера для обработки данных.
Подробное раскрытие настоящего изобретения
Ниже подробно описаны варианты осуществления настоящего изобретения, примеры которых проиллюстрированы на прилагаемых чертежах, причем во всем описании этого изобретения одинаковые или аналогичные цифровые обозначения указывают на одинаковые или аналогичные элементы или элементы с одинаковыми или аналогичными функциями. Варианты осуществления, описанные ниже со ссылкой на прилагаемые чертежи, носят иллюстративный характер и предназначены для пояснения настоящего изобретения, и их не следует рассматривать как ограничивающие настоящее изобретение.
Система и способ трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых согласно вариантам осуществления настоящего изобретения описаны ниже со ссылкой на прилагаемые чертежи.
На фиг. 1 представлена структурная схема системы трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых согласно одному варианту осуществления настоящего изобретения. Как видно из фиг. 1, система трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых содержит по меньшей мере один первый многочастотный лазерный радар 1, по меньшей мере один второй многочастотный лазерный радар 2, по меньшей мере один держатель 3 лазерных радаров, по меньшей мере одну панорамную камеру 4, по меньшей мере одно устройство 6 инерциальной навигации и компьютер 7 для обработки данных.
Следует отметить, что на фиг. 1 представлена структура системы из одного первого многочастотного лазерного радара 1, одного второго многочастотного лазерного радара 2, одного держателя 3 лазерных радаров, одной панорамной камеры 4, одного устройства 6 инерциальной навигации и одного компьютера 7 для обработки данных. Фиг. 1 представляет собой только пример, который использован не в качестве ограничения вариантов осуществления настоящего изобретения.
Согласно вариантам осуществления настоящего изобретения первый многочастотный лазерный радар 1 расположен на держателе 3 лазерных радаров и ориентирован в горизонтальном направлении, а второй многочастотный лазерный радар 2 расположен на держателе 3 лазерных радаров в направлении под прямым углом к первому многочастотному лазерному радару 1.
Вертикальные углы обзора первого многочастотного лазерного радара и второго многочастотного лазерного радара составляют ±15 градусов, а горизонтальные углы обзора первого многочастотного лазерного радара и второго многочастотного лазерного радара составляют 360 градусов.
Первый многочастотный лазерный радар 1 и второй многочастотный лазерный радар 2 применяют для сбора трехмерной геологической информации о забое угольной шахты и отправки собранной трехмерной геологической информации о забое угольной шахты на компьютер 7 для обработки данных.
Согласно вариантам осуществления настоящего изобретения панорамная камера 4 расположена над первым многочастотным лазерным радаром 1.
Панорамная камера 4 представляет собой панорамную камеру со сферическим углом обзора 360 градусов, ее применяют для сбора информации о цвете забоя (то есть, RGB-информации) угольной шахты и отправки собранной информации о цвете забоя угольной шахты на компьютер 7 для обработки данных.
Согласно вариантам осуществления настоящего изобретения устройство 6 инерциальной навигации расположено под держателем 3 лазерных радаров в месте расположения первого многочастотного лазерного радара 1.
Устройство 6 инерциальной навигации применяют для сбора в режиме реального времени пространственной информации о степени свободы держателя лазерных радаров и отправки собранной пространственной информации о степени свободы держателя лазерных радаров на компьютер для обработки данных.
Согласно вариантам осуществления настоящего изобретения компьютер 7 для обработки данных расположен под держателем 3 лазерных радаров и соответственно соединен с первым многочастотным лазерным радаром 1, вторым многочастотным лазерным радаром 2, панорамной камерой 4 и устройством 6 инерциальной навигации.
Компьютер для обработки данных применяют для получения трехмерной геологической информации и информации о цвете забоя угольной шахты, а также пространственной информации о степени свободы держателя лазерных радаров, и воспроизведения трехмерной информации с лазера об облаке точек забоя угольной шахты на основе полученной информации.
Компьютер 7 для обработки данных может содержать 8-ядерный процессор, а потребление энергии компьютером могут при необходимости задавать равным 10 Вт, 15 Вт или 30 Вт.
Следует отметить, что конструкция компьютера 7 для обработки данных, расположенного под держателем 3 лазерных радаров, представляет собой только пример, и компьютер 7 для обработки данных может быть прикреплен к другим частям держателя 3 лазерных радаров или размещен отдельно.
Согласно вариантам осуществления настоящего изобретения, как показано на фиг. 2, система трехмерного воспроизведения облака цветных точек для целей разработки полезных содержит основание 5 панорамной камеры, держатель 8 устройства инерциальной навигации и держатель 9 компьютера для обработки данных.
Панорамная камера 4 расположена над первым многочастотным лазерным радаром 1 на основании 5 панорамной камеры.
Устройство 6 инерциальной навигации расположено на держателе 8 устройства инерциальной навигации под держателем 3 лазерных радаров в месте расположения первого многочастотного лазерного радара 1.
Компьютер 7 для обработки данных расположен под держателем 3 лазерных радаров на держателе 9 компьютера для обработки данных.
Следует отметить, что воспроизведение трехмерной информации с лазера об облаке точек забоя угольной шахты, исходя из полученной информации, включает в себя следующее.
Получают внешнюю матрицу между первым многочастотным лазерным радаром 1 и вторым многочастотным лазерным радаром 2 и внешнюю матрицу между первым многочастотным лазерным радаром 1 и устройством 6 инерциальной навигации и, исходя из внешних матриц, определяют трехмерную информации с лазера об облаке точек, относящихся к забою угольной шахты.
Для получения информации об облаке точек после обработки для компенсации искажений выполняют обработку для компенсации искажений в трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из пространственной информации о степени свободы держателя 3 лазерных радаров, собранной устройством 6 инерциальной навигации.
Информацию об облаке точек после обработки для компенсации искажений и собранную информацию о цвете преобразуют в единую систему координат и затем информацию о цвете добавляют в соответствующее местоположение облака точек для получения трехмерной информации с лазера об облаке точек, относящихся к воспроизводимому забою угольной шахты.
Кроме того, определение трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из внешних матриц, включает в себя следующее.
Исходя из внешних матриц между первым многочастотным лазерным радаром 1 и вторым многочастотным лазерным радаром 2, трехмерную геологическую информацию о забое угольной шахты, собранную вторым многочастотным лазерным радаром 2, преобразуют в систему координат, соответствующую первому многочастотному лазерному радару 1.
Исходя из внешней матрицы между первым многочастотным лазерным радаром 1 и устройством 6 инерциальной навигации, собранную пространственную информацию о степени свободы держателя 3 лазерных радаров преобразуют в систему координат, соответствующую первому многочастотному лазерному радару 1.
Информацию об облаке точек в системе координат, соответствующей первому многочастотному лазерному радару 1, после преобразования принимают в качестве трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты.
Обработка для компенсации искажений в трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из пространственной информации о степени свободы держателя 3 лазерных радаров, которая собрана устройством 6 инерциальной навигации, включает в себя следующее.
Вычисление пространственного положения выполняют по собранной пространственной информации о степени свободы держателя 3 лазерных радаров с применением расширенного алгоритма фильтрации Калмана для получения результата вычисления пространственного положения.
Используя результат вычисления пространственного положения, точки в каждом блоке облака точек трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, соответственно преобразуют в систему координат на момент определения местоположения первой точки блока облака точек.
Таким образом, система трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых, предложенная в настоящем описании изобретения, позволяет расширить диапазон сканирования лазерных рада и собрать больше информации об облаке точек за счет применения двух многочастотных лазерных радаров, расположенных под прямым углом друг к другу. Кроме того, применяя панорамную камеру, собирают информацию о цвете текущего местоположения, то есть, RGB-информацию, информацию об облаке точек и информацию о цвете преобразуют в единую систему координат, применяя внешние матрицы, причем информацию об облаке точек и информацию о цвете в одном и том же местоположении объединяют друг с другом, так что RGB-информацию, то есть, информацию о цвете, добавляют к облаку точек при создании облака точек, чтобы восстановить реальную картину сканируемой среды и решить проблему сложного определения объектов на забое угольной шахты.
Для реализации описанных выше вариантов осуществления в настоящем изобретении также предложен способ воспроизведения трехмерного облака цветных точек для целей разработки полезных ископаемых.
На фиг. 3 представлена блок-схема способа трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых согласно одному варианту осуществления настоящего изобретения. Как показано на фиг., способ может содержать следующие стадии.
На стадии 1 собирают трехмерную геологическую информацию и информацию о цвете забоя угольной шахты, а также пространственную информацию о степени свободы держателя лазерных радаров, и получают внешнюю матрицу между первым многочастотным радаром и вторым многочастотным радаром, а также внешнюю матрицу между первым многочастотным радаром и устройством инерциальной навигации.
На стадии 2 трехмерную информацию с лазера об облаке точек, относящихся к забою угольной шахты, определяют исходя из собранной трехмерной геологической информации и информации о цвете забоя угольной шахты, а также полученной внешней матрицы между первым многочастотным радаром и вторым многочастотным радаром и полученной внешней матрицы между первым многочастотным радаром и устройством инерциальной навигации.
На стадии 3 для получения информации об облаке точек после обработки для компенсации искажений выполняют обработку для компенсации искажений в трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, с применением собранной пространственной информации о степени свободы держателя лазерных радаров.
На стадии 4 информацию об облаке точек после обработки для компенсации искажений и собранную информацию о цвете преобразуют в единую систему координат и затем информацию о цвете добавляют в соответствующее местоположение облака точек для получения воспроизведенной трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты.
Согласно вариантам осуществления настоящего изобретения определение трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из собранной трехмерной геологической информации и информации о цвете забоя угольной шахты, а также полученной внешней матрицы между первым многочастотным радаром и вторым многочастотным радаром и полученной внешней матрицы между первым многочастотным радаром и устройством инерциальной навигации, включает в себя следующие стадии.
Исходя из внешней матрицы между первым многочастотным лазерным радаром и вторым многочастотным лазерным радаром, трехмерную геологическую информацию о забое угольной шахты, собранную вторым многочастотным лазерным радаром, преобразуют в систему координат, соответствующую первому многочастотному лазерному радару.
Исходя из внешней матрицы между первым многочастотным лазерным радаром и устройством инерциальной навигации, собранную пространственную информацию о степени свободы держателя лазерных радаров преобразуют в систему координат, соответствующую первому многочастотному лазерному радару.
Информацию об облаке точек в системе координат, соответствующей первому многочастотному лазерному радару, после преобразования принимают в качестве трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты.
Согласно вариантам осуществления настоящего изобретения обработка для компенсации искажений в трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, с использованием пространственной информации о степени свободы держателя лазерных радаров включает в себя следующее.
Вычисление пространственного положения выполняют по собранной пространственной информации о степени свободы держателя лазерных радаров с применением расширенного алгоритма фильтрации Калмана для получения результата вычисления пространственного положения.
Используя результат вычисления пространственного положения, точки в каждом блоке облака точек трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, соответственно преобразуют в систему координат на момент определения местоположения первой точки блока облака точек.
В итоге способ трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых, предложенный в настоящем изобретении, включает в себя: сбор трехмерной геологической информации и информации о цвете забоя угольной шахты и пространственной информации о степени свободы держателя лазерных радаров, и получение внешней матрицы между первым многочастотным лазерным радаром и вторым многочастотным лазерным радаром, а также внешней матрицы между первым многочастотным лазерным радаром и устройством инерциальной навигации; определение трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из собранной трехмерной геологической информации и информации о цвете забоя угольной шахты, а также внешней матрицы между первым многочастотным лазерным радаром и вторым многочастотным лазерным радаром и внешней матрицы между первым многочастотным лазерным радаром и устройством инерциальной навигации; выполнение обработки для компенсации искажений в трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты путем использования собранной пространственной информации о степени свободы держателя лазерных радаров с целью получения информации об облаке точек после обработки для компенсации искажений; преобразование информации об облаке точек после обработки для компенсации искажений и собранной информации о цвете к единой системе координат с последующим добавлением информации о цвете в соответствующее местоположение в облаке точек для получения воспроизведенной трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты. Таким образом, RGB-информацию, то есть, информацию о цвете, добавляют к облаку точек при создании облака точек, чтобы воспроизвести реальную картину сканируемой среды и решить проблему сложного определения объектов на забое угольной шахты.
Следует понимать, что возможно изменять порядок выполнения стадий, добавлять или удалять за счет применения различных форм графов, показанных выше. Например, описанные в настоящем изобретении стадии могут быть выполнены параллельно, последовательно или в разных порядках при условии, что будет достигнут требуемый результат технического решения, описанного в настоящем раскрытии изобретения и не ограниченного им.
Описанные выше конкретные варианты осуществления не ограничивают объем охраны настоящего изобретения. Специалистам в данной области техники должно быть понятно, что согласно требованиям к конструкции и другим факторам могут быть выполнены различные модификации, комбинации, подкомбинации и замены. Любая модификация, эквивалентная замена и усовершенствование, выполненные в соответствии с духом и принципом настоящего изобретения, включены в объем патентной охраны настоящего изобретения.
Ссылка в настоящем описании изобретения на «один вариант осуществления», «некоторые варианты осуществления», «пример», «конкретный пример» или «пример варианта осуществления» означает, что конкретные характерные черты, конструкции, вещества или особенности, описанные в связи с этим вариантом осуществления или примером, содержатся по меньшей мере в одном варианте осуществления или примере настоящего изобретения. В настоящем описании изобретения основные упоминания приведенных выше терминов не обязательно относятся к одному и тому же варианту осуществления или примеру. Кроме того, описанные конкретные характерные черты, конструкции, вещества или характеристики могут быть любым подходящим способом объединены в одном или нескольких вариантах осуществления или примеров. Кроме того, специалисты в данной области техники при отсутствии взаимных противоречий могут комбинировать и группировать различные варианты осуществления или примеры и характерные черты различных вариантов осуществления или примеров, описанных в настоящем описании изобретения.
Кроме того, термины «первый» и «второй» использованы только для целей описания, их не следует понимать как указывающие на или подразумевающие относительную важность или косвенно указывающие на количество указанных технических признаков. Таким образом, признаки, описанные как «первый» или «второй», могут явно или неявно содержать по меньшей мере один такой признак. В описании настоящего изобретения «некоторое количество» означает по меньшей мере два, например, два, три и т.п., или более, если конкретно не указано иное.
Любой процесс или способ, описанный в блок-схеме или иным образом описанный в настоящем документе, можно рассматривать как представление модуля, сегмента или части кода, содержащего одну или несколько исполняемых команд для реализации настраиваемых логических функций или стадий процесса, и объем предпочтительных вариантов осуществления настоящего изобретения содержит другие реализации, в которых функции могут быть выполнены не в представленном или обсуждаемом порядке, например, по существу одновременно или в обратном порядке в соответствии с задействованными функциями, что понятно специалистам в той области, к которой относятся варианты осуществления настоящего изобретения.
Логическое устройство и/или стадии, представленные в блок-схеме или иным образом описанные в настоящем документе, можно, например, рассматривать как упорядоченный список исполняемых команд для реализации логических функций и можно делать их составной частью любого машиночитаемого носителя для использования системой исполнения команд, устройством или приспособлением или в сочетании с ними (например, компьютерной системой, системой, содержащей процессор или другими системами, которые могут получать команды от системы исполнения команд, устройства или приспособления, и исполнять команды). С точки зрения настоящего описания изобретения «машиночитаемым носителем» может быть любое устройство, которое может содержать, хранить, передавать, распространять или пересылать программу для использования системой исполнения команд, устройством или приспособлением или в связи с ними. Более конкретные примеры (неисчерпывающий перечень) машиночитаемых носителей включают в себя: часть электрической схемы (электронное устройство) с одной или несколькими разводками проводов, портативный блок компьютерных дисков (магнитное устройство), оперативная память (RAM), постоянное запоминающее устройство (ROM), стираемое программируемое постоянное запоминающее устройство (EPROM или флеш-память), оптоволоконное устройство или переносное постоянное запоминающее устройство на компакт-диске (CD-ROM). Кроме того, машиночитаемый носитель может представлять собой даже бумага или другой подходящий носитель, на котором может быть напечатана программа, поскольку программу можно получить в электронном виде, например, путем оптического сканирования бумаги или другого носителя, при необходимости с дальнейшим редактированием, интерпретацией или обработкой другими подходящими способами и последующим хранением в компьютерной памяти.
Следует понимать, что различные части настоящего описания изобретения могут быть реализованы в аппаратном обеспечении, программном обеспечении, аппаратно-программном обеспечении или их сочетании. Согласно приведенным выше вариантам осуществления некоторое количество стадий или способов могут быть реализованы при помощи программного обеспечения или аппаратно-программного обеспечения, которое хранят в памяти и запускают при помощи соответствующей системы исполнения команд. Например, если его реализуют аппаратно, как в другом варианте осуществления, его можно реализовать при помощи одной из следующих технологий, известных в данной области техники, или их сочетания: дискретных логических схем с логическими элементами для реализации логических функций на сигналах данных, применения конкретных интегральных схем с соответствующими элементами комбинационной логики, программируемыми логическими матрицами (PGA), программируемыми логическими интегральными схемами (FPGA) и т.п.
Специалистам в данной области техники будет понятно, что все или часть стадий в способе реализации описанных выше вариантов осуществления могут быть выполнены путем подачи команд соответствующему аппаратному обеспечению посредством программы, которую хранят на машиночитаемом носителе данных, и при исполнении программа содержит одну или сочетание стадий вариантов осуществления этого способа.
Кроме того, каждый функциональный блок в каждом варианте осуществления настоящего изобретения может быть интегрирован в один модуль обработки, или каждый блок может физически существовать отдельно, или два или несколько блоков могут быть интегрированы в один модуль. Вышеупомянутые интегрированные модули могут быть реализованы в форме функциональных модулей аппаратного обеспечения или программного обеспечения. Интегрированный модуль могут также хранить на машиночитаемом носителе данных, если он реализован в форме функционального модуля программного обеспечения и его продают или применяют как независимый продукт.
Упомянутый выше носитель данных может представлять собой постоянное запоминающее устройство, магнитный диск или оптический диск и т.п. Несмотря на то, что выше были показаны и описаны варианты осуществления настоящего изобретения, понятно, что приведенные выше варианты осуществления являются иллюстративными и их не следует понимать как ограничение настоящего раскрытия изобретения, и специалисты в данной области техники могут вносить в вышеупомянутые варианты осуществления изменения, модификации, замены и варианты, которые попадают в объем охраны настоящего раскрытия изобретения.
Изобретение относится к области трехмерного воспроизведения угольных шахт. Предложены система и способ трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых. Система включает в себя: первый многочастотный лазерный радар (1), второй многочастотный лазерный радар (2), держатель лазерных радаров (3), панорамную камеру (4), устройство (6) инерциальной навигации и компьютер (7) для обработки данных. Причем первый многочастотный лазерный радар (1) установлен на держатель лазерных радаров (3) и ориентирован в горизонтальном положении. Второй многочастотный лазерный радар (2) установлен на держатель лазерных радаров (3). Направления ориентации второго многочастотного лазерного радара и первого многочастотного лазерного радара (1) образуют прямой угол. Панорамная камера (4) расположена над первым многочастотным лазерным радаром (1), устройство (6) инерциальной навигации расположено под держателем (3) лазерных радаров, а компьютер (7) для обработки данных расположен под держателем (3) лазерных радаров. RGB-информацию добавляют к облаку точек при построении облака точек и решают проблему, связанную со сложностью распознавания объектов на забое угольной шахты. Технический результат – повышение точности созданного изображения по отношению к реальному изображению. 2 н. и 6 з.п. ф-лы, 3 ил.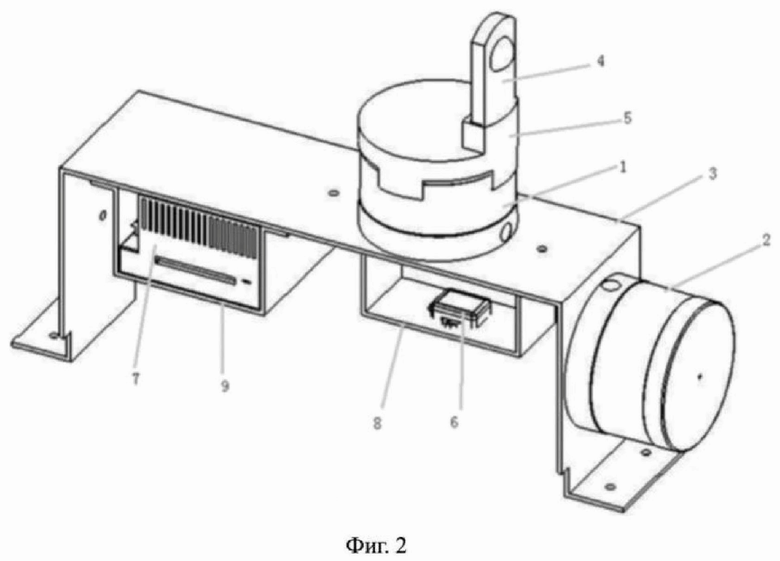
1. Система трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых, которая содержит первый многочастотный лазерный радар, второй многочастотный лазерный радар, держатель лазерных радаров, панорамную камеру, устройство инерциальной навигации и компьютер для обработки данных,
причем многочастотный лазерный радар расположен на держателе лазерных радаров и ориентирован в горизонтальном направлении, а второй многочастотный лазерный радар расположен на держателе лазерных радаров в направлении под прямым углом к первому многочастотному лазерному радару;
панорамная камера расположена над первым многочастотным лазерным радаром;
устройство инерциальной навигации расположено под держателем лазерных радаров в месте расположения первого многочастотного лазерного радара;
компьютер для обработки данных расположен под держателем лазерных радаров и соответственно соединен с первым многочастотным лазерным радаром, вторым многочастотным лазерным радаром, панорамной камерой и устройством инерциальной навигации,
причем первый многочастотный лазерный радар и второй многочастотный лазерный радар рассчитаны на сбор трехмерной геологической информации о забое угольной шахты и отправку собранной трехмерной геологической информации о забое угольной шахты на компьютер для обработки данных;
панорамная камера представляет собой панорамную камеру со сферическим углом обзора 360 градусов, она рассчитана на сбор информации о цвете забоя угольной шахты и отправку собранной информации о цвете забоя угольной шахты на компьютер для обработки данных;
устройство инерциальной навигации рассчитано на сбор в режиме реального времени пространственной информации о степени свободы держателя лазерных радаров и отправку собранной пространственной информации о степени свободы держателя лазерных радаров на компьютер для обработки данных;
компьютер для обработки данных рассчитан на получение трехмерной геологической информации и информации о цвете забоя угольной шахты, а также пространственной информации о степени свободы держателя лазерных радаров, и воспроизведение трехмерной информации с лазера об облаке точек забоя угольной шахты на основе полученной информации,
а воспроизведение трехмерной информации с лазера об облаке точек забоя угольной шахты, исходя из полученной информации, включает в себя:
получение внешней матрицы между первым многочастотным лазерным радаром и вторым многочастотным лазерным радаром и внешней матрицы между первым многочастотным лазерным радаром и устройством инерциальной навигации, и определение трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из внешних матриц;
выполнение обработки для компенсации искажений в трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из пространственной информации о степени свободы держателя лазерных радаров, собранной устройством инерциальной навигации, для получения информации об облаке точек после обработки для компенсации искажений;
преобразование информации об облаке точек после обработки для компенсации искажений и собранной информации о цвете в единую систему координат с последующим добавлением информации о цвете в соответствующее местоположение облака точек для получения воспроизведенной трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты.
2. Система трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых по п. 1, в которой система трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых содержит основание панорамной камеры, держатель устройства инерциальной навигации и держатель компьютера для обработки данных;
панорамная камера расположена над первым многочастотным лазерным радаром на основании панорамной камеры;
устройство инерциальной навигации расположено на держателе устройства инерциальной навигации под держателем лазерных радаров в месте расположения первого многочастотного лазерного радара;
компьютер для обработки данных расположен под держателем лазерных радаров на держателе компьютера для обработки данных.
3. Система трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых по п. 1, в которой вертикальные углы обзора первого многочастотного лазерного радара и второго многочастотного лазерного радара составляют ±15 градусов, а горизонтальные углы обзора первого многочастотного лазерного радара и второго многочастотного лазерного радара составляют 360 градусов.
4. Система трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых по п. 1, в которой определение трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из внешних матриц, включает в себя:
исходя из внешней матрицы между первым многочастотным лазерным радаром и вторым многочастотным лазерным радаром, преобразование трехмерной геологической информации о забое угольной шахты, собранной вторым многочастотным лазерным радаром, в систему координат, соответствующую первому многочастотному лазерному радару;
исходя из внешней матрицы между первым многочастотным лазерным радаром и устройством инерциальной навигации, преобразование собранной пространственной информации о степени свободы держателя лазерных радаров в систему координат, соответствующую первому многочастотному лазерному радару;
после преобразования принятие информации об облаке точек в системе координат, соответствующей первому многочастотному лазерному радару, в качестве трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты.
5. Система трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых по п. 4, в которой выполнение обработки для компенсации искажений в трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из пространственной информации о степени свободы держателя лазерных радаров, собранной устройством инерциальной навигации, включает в себя:
вычисление пространственного положения по собранной пространственной информации о степени свободы держателя лазерных радаров с применением расширенного алгоритма фильтрации Калмана для получения результата вычисления пространственного положения;
применение результата вычисления пространственного положения для соответственного преобразования точек в каждом блоке облака точек трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, в систему координат на момент определения местоположения первой точки блока облака точек.
6. Способ воспроизведения трехмерного облака цветных точек на основе системы трехмерного воспроизведения облака цветных точек для целей разработки полезных ископаемых по любому из пп. 1-5, причем способ включает в себя:
сбор трехмерной геологической информации и информации о цвете забоя угольной шахты и пространственной информации о степени свободы держателя лазерных радаров, и получение внешней матрицы между первым многочастотным радаром и вторым многочастотным радаром, а также внешней матрицы между первым многочастотным радаром и устройством инерциальной навигации;
определение трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из собранной трехмерной геологической информации и информации о цвете забоя угольной шахты, а также полученной внешней матрицы между первым многочастотным радаром и вторым многочастотным радаром и полученной внешней матрицы между первым многочастотным радаром и устройством инерциальной навигации;
выполнение обработки для компенсации искажений в трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, с применением собранной пространственной информации о степени свободы держателя лазерных радаров с целью получения информации об облаке точек после обработки для компенсации искажений;
преобразование информации об облаке точек после обработки для компенсации искажений и собранной информации о цвете в единую систему координат с последующим добавлением информации о цвете в соответствующее местоположение облака точек для получения воспроизведенной трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты.
7. Способ воспроизведения трехмерного облака цветных точек для целей разработки полезных ископаемых по п. 6, в котором определение трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, исходя из собранной трехмерной геологической информации и информации о цвете забоя угольной шахты, а также полученной внешней матрицы между первым многочастотным радаром и вторым многочастотным радаром и полученной внешней матрицы между первым многочастотным радаром и устройством инерциальной навигации, включает в себя:
исходя из внешней матрицы между первым многочастотным лазерным радаром и вторым многочастотным лазерным радаром, преобразование трехмерной геологической информации о забое угольной шахты, собранной вторым многочастотным лазерным радаром, в систему координат, соответствующую первому многочастотному лазерному радару;
исходя из внешней матрицы между первым многочастотным лазерным радаром и устройством инерциальной навигации, преобразование собранной пространственной информации о степени свободы держателя лазерных радаров в систему координат, соответствующую первому многочастотному лазерному радару;
после преобразования принятие информации об облаке точек в системе координат, соответствующей первому многочастотному лазерному радару, в качестве трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты.
8. Способ воспроизведения трехмерного облака цветных точек для целей разработки полезных ископаемых по п. 6, в котором выполнение обработки для компенсации искажений в трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, с применением собранной пространственной информации о степени свободы держателя лазерных радаров включает в себя:
вычисление пространственного положения по собранной пространственной информации о степени свободы держателя лазерных радаров с применением расширенного алгоритма фильтрации Калмана для получения результата вычисления пространственного положения;
применение результата вычисления пространственного положения для соответственного преобразования точек в каждом блоке облака точек трехмерной информации с лазера об облаке точек, относящихся к забою угольной шахты, в систему координат на момент определения местоположения первой точки блока облака точек.
| CN 113504544 A 15.10.2021 | |||
| CN 112577517 A 30.03.2021 | |||
| CN 107121064 A 01.09.2017 | |||
| CN 113239726 A 10.08.2021 | |||
| CN 112556654 A 26.03.2021 | |||
| CN 113009504 A 22.06.2021. |

