1. Область техники, к которой относится изобретение
Изобретение относится к измерительной технике и может быть использовано для исследования диаграмм направленности (ДН) фазированных антенных решеток (ФАР) с помощью беспилотных авиационных систем (БАС), содержащих радиотехнический блок, приемник ГЛОНАСС и ориентируемую на центр ФАР бортовую антенну.
2. Уровень техники
Известен способ измерения ДН диапазонной антенны (СССР, SU 1804627 A3, G01R 29/10, опубл. 23.03.1993), включающий излучение сигнала на каждой частоте рабочего диапазона с борта летательного аппарата, перемещающегося в дальней зоне исследуемой антенны по заданной траектории.
Также известен облетный способ измерения ДН, основанный на перемещении измерительной аппаратуры в пространстве относительно исследуемой антенны с помощью пилотируемых и непилотируемых летательных аппаратов описанный в книге «Метод измерения характеристик антенн СВЧ» под ред. Н.М. Цейтлина. 1985., стр. 128-135.
Общими недостатками данных способов являются низкие точность и производительность измерений диаграммы направленности.
Известен способ измерения ДН приемной антенны (СССР, SU 1778714 A1, G01R 29/10, опубл. 30.11.1992), в котором излучаются измерительные сигналы f0 с борта летательного аппарата, перемещающегося в дальней зоне исследуемой антенны, прием излученного измерительного сигнала исследуемой антенной и опорного сигнала опорной антенной, измерение отношения амплитуд принятого измерительного и опорного сигналов с одновременным измерением координат летательного аппарата относительно исследуемой антенны, при этом ось опорной антенны постоянно ориентируют в направлении на летательный аппарат. Недостатком данного способа является невозможность измерения ДН передающих антенн и высокая удельная стоимость измерений за счет сложной конструкции и низкого уровня автоматизации.
Известен метод измерения параметров направленности антенны с помощью БПЛА методом облета (Российская Федерация, RU 2626561 С1, G01R 29/10 опубл. 28.07.2017), в котором в качестве носителя измерительного зонда используют беспилотный летательный аппарат (БПЛА), совершающий круговые облеты измеряемой антенны вдоль маршрута, представляющего собой сечения сферы радиусом R, превышающим расстояние, удовлетворяющее условию дальней зоны исследуемой антенны, в полностью автоматическом режиме. В случае измерения параметров направленности передающей антенны, измерения мощности поля производятся непосредственно на борту БПЛА с помощью широкополосного измерителя мощности, фиксирующего мощность полезного сигнала, поступающего с входа перестраиваемого полосового фильтра. В случае измерения параметров направленности приемной антенны, регистрация амплитуды сигнала производится на земле посредством приемного измерительного устройства, подключенного к испытуемой антенне. Для повышения точности измерений амплитуды сигнала, в процессе постобработки в результаты измерений вносятся поправки на основе данных о положении БПЛА относительно исследуемой антенны в момент измерений и априори известной ДН бортовой антенны. Определение глобальных координат БПЛА выполняется посредством бортового приемника сигналов глобальной навигационной спутниковой системы (ГНСС, в том числе ГЛОНАСС). Требуемая точность достигается за счет внесения полученных с контрольно-корректирующей станции (ККС) дифференциальных поправок в результат измерений в процессе постобработки.
Недостатком данного способа является отсутствие контроля расположения оси, проходящей через фазовые центры зондовой и испытуемой антенн, в некоторых случаях приводящее к методологическим погрешностям, подвергающих сомнению ценность измерений.
Наиболее близким к заявляемому является способ автоматического измерения параметров направленности антенны методом облета в дальней зоне исследуемой антенны, описанный в изобретении «Способ автоматизированной ориентации бортовой антенны беспилотного комплекса для измерений параметров направленности антенн» (Российская Федерация, RU 2704393 C1, G01R 29/10 опубл. 28.10.2019), в котором с целью автоматизированного измерения параметров направленности антенны, в качестве носителя измерительного зонда используют беспилотный летательный аппарат, а недостаток, связанный с отсутствием контроля расположения оси, проходящей через фазовые центры зондовой и испытуемой антенн, устранен путем установки измерительной бортовой антенны на гиростабилизированный подвес. В качестве инструмента наведения используется гиростабилизированный подвес с подключенным контроллером наведения. В процессе облета бортовая антенна наводится в автоматическом режиме на фазовый центр испытуемой антенны с помощью контроллера наведения, управляющего двигателями подвеса. Точное наведение на фазовый центр испытуемой антенны, координаты которого записываются в память контроллера подвеса перед началом измерений, производится на основе навигационных данных, получаемых из приемника глобальной навигационной спутниковой системы. Этот вариант принимается за прототип.
Недостатком выбранного в качестве прототипа способа является необходимость работы на значительных удалениях от антенн, для которых условие дальней зоны может выполняться на расстояниях 10 и более километров, а требуемые высоты подъема измерительного зонда могут составлять свыше 3 километров, что приводит к существенным временным затратам на проведение измерений и значительному удорожанию как самого носителя, так и измерительного оборудования, а в отдельных случаях, при больших требуемых высотах подъема, к полной невозможности проведения измерений.
3. Раскрытие изобретения
Основной задачей, на решение которой направлено заявляемое изобретение, является разработка нового способа, обеспечивающего получение следующего технического результата: уменьшение требуемой высоты подъема беспилотной авиационной системы (БАС) и сокращение времени измерений.
Поставленная задача решается, а требуемый технический результат при использовании изобретения достигается тем, что измерения производятся с помощью зонда (ориентируемой на центр исследуемой ФАР бортовой антенны, соединенной с радиотехническим блоком) в составе беспилотной авиационной системы (БАС), находящемся на расстоянии r < Rдз в зоне Френеля исследуемой ФАР, где Rдз - расстояние до границы дальней зоны.
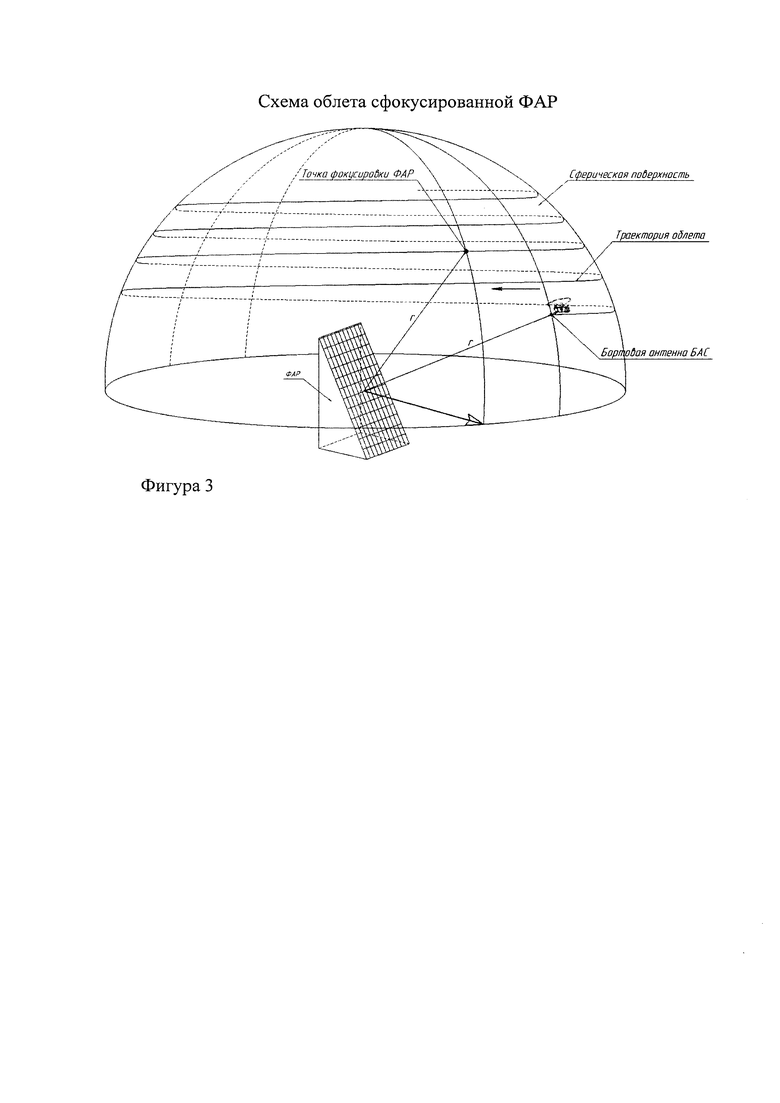
Для проведения измерений ФАР фокусируют на расстояние r, а БАС либо совершает облет ФАР по сферической поверхности радиусом г, выдерживая постоянное расстояние между центром ФАР и бортовой антенной (п.1), либо зависает в точке фокусировки (п.2).
В первом случае облет производится на меньшем удалении, чем при облете в дальней зоне, что позволяет снизить максимальную высоту подъема беспилотной авиационной системы (БАС) и длительность облета, сократив, таким образом, время измерений.
При измерениях антенных характеристик на расстоянии r < Rдз как поле, создаваемое передающей измеряемой антенной на приемной зондовой антенне, так и поле, создаваемое передающей зондовой антенной на измеряемой антенне, отличаются от плоской волны. Это отличие компенсируют введением зависящей от расстояния и направления корректирующей фазовой подставки в сигналы передающих или приемных каналов ФАР соответственно, что эквивалентно фокусировке в заданную точку, то есть перефокусировке ФАР, первоначально сфокусированной «на бесконечность». При такой перефокусировке сигналы каналов складываются в точке наблюдения на расстоянии г фокусировки с теми же фазами, что и при измерениях в дальней зоне в том же направлении, и, соответственно, характеристики антенны определяются так же, как при измерениях в дальней зоне, без дополнительных преобразований.
Во втором случае БАС зависает в заданной точке на расстоянии г в зоне Френеля ФАР в направлении (θ0, ϕ0), а ФАР фокусируют в эту точку с использованием суммы сканирующей линейной и зависящей от направления и расстояния корректирующей фазовых подставок, измеряя уровень сигнала в главном лепестке. Затем ФАР последовательно перефокусируют по направлению с сохранением расстояния г фокусировки таким образом, чтобы бортовая антенна оказывалась в контрольных точках ДН (θi, ϕj), где (θi, ϕj) - угловые координаты контрольной точки в системе координат, связанной с плоскостью апертуры, и производят измерения динамической диаграммы направленности (ДДН), что позволяет добиться дополнительного сокращения времени измерений за счет быстрого электронного управления ФАР. Для этого достаточно смещать главный луч на углы (θ0 - θi, ϕ0 - ϕj) относительно первоначального направления изменением наклона сканирующей линейной фазовой подставки без изменения корректирующей фазовой подставки, последовательно ориентируя главный луч в направлениях (2θ0 - θi, 2ϕ0 - ϕj). При такой перефокусировке сигналы каналов складываются в точке наблюдения с координатами (r, θ0, ϕ0) на сфере радиуса r с теми же фазами, что и при измерениях в дальней зоне в направлении (θi, ϕj), и, соответственно, характеристики антенны также определяются без дополнительных преобразований.
Данные измерений фиксируются с метками времени от ГЛОНАСС, и после их обработки строится ДДН.
Для достижения дополнительного технического результата, повышения точности измерений, в процессе постобработки и построения ДН в результат измерений вносятся поправки на основе данных о положении БАС относительно исследуемой ФАР в момент измерений. Определение глобальных координат БАС выполняется посредством бортового приемника сигналов ГЛОНАСС. Повышение точности измерения достигается за счет коррекции ошибок измерения глобальных координат путем учета полученных с контрольно-корректирующей станции (ККС) дифференциальных поправок. Синхронизация данных измерений амплитуды сигнала, координат БАС и направления перефокусировки ФАР производится в процессе постобработки по временным меткам, полученным с приемников ГЛОНАСС на борту БАС и с ККС на земле.
4. Краткое описание чертежей
На фигуре 1 представлена схема измерения ДН ФАР, находящейся в режиме приема сигнала, состоящая из: БАС - 1, радиотехнического блока - 2, включающего в себя бортовой генератор - 3, бортовой антенны - 4 на гиростабилизированном подвесе - 5 с системой управления подвесом - 6, бортового приемника сигналов ГЛОНАСС - 7, бортового накопителя информации - 8, исследуемой приемной ФАР - 9, включающей в себя комплекс приемных каналов - 10, устройство суммирования и формирования диаграммы направленности - 11, внутренние измерительные средства ФАР - 12, приемного измерительного устройства - 13, ККС - 14, наземной станции ЭВМ - 15.
На фигуре 2 представлена схема измерения ДН ФАР, находящейся в режиме передачи сигнала, содержащая: аттенюатор - 16, анализатор спектра - 17, исследуемую передающую ФАР - 18, включающую в себя комплекс передающих каналов - 19 и устройство формирования диаграммы направленности - 20.
На фигуре 3 представлена схема облета БАС сфокусированной ФАР по сферической поверхности радиусом, равным расстоянию фокусировки, при измерениях ДН в условиях облета в зоне Френеля.
На фигуре 4 представлена схема перефокусировки ФАР на углы, соответствующие контрольным точкам ДН, при измерениях в условиях зависания БАС в заданной точке.
5. Осуществление изобретения
Принцип измерения характеристик направленности приемной ФАР, фиг.1, состоит в следующем.
Бортовая антенна - 4 на гиростабилизированном подвесе - 5 с системой управления подвесом - 6, подключенная к бортовом генератору -3 в составе радиотехнического блока - 2, с помощью беспилотной авиационной системы (БАС) - 1, содержащей бортовой приемник сигналов ГЛОНАСС - 7 и бортовой накопитель информации - 8, вводится в зону измерений так, что ее фазовый центр находится на расстоянии г от центра исследуемой ФАР - 9, удовлетворяющем условию зоны Френеля

где 
 - расстояния от центра ФАР до границ ближней и дальней зон;
- расстояния от центра ФАР до границ ближней и дальней зон;
D - максимальный размер апертуры;
λ - длина волны излучения.
С периодичностью Δt на бортовой накопитель информации - 8 и систему управлния подвесом - 6 поступают данные о текущем времени и координатах с бортового приемника сигналов ГЛОНАСС - 7. Используя данные о текущих координах, система управления подвесом - 6, в памяти которой находятся координаты центра ФАР, с учетом показаний внутренних датчиков об ориентации БАС, управляет двигателями гиростабилизированного подвеса - 5, так, что подвес ориентирует бортовую антенну - 4 на центр исследуемой ФАР.
Генератор - 3 через бортовую антенну - 4 освещает монохроматическим излучением длиной волны λ приемные каналы - 10 исследуемой ФАР - 9, сигналы с которых поступают на устройство суммирования и формирования диаграммы направленности - 11. По запросу ЭВМ - 15 устройство суммирования и формирования диаграммы направленности - 11 формирует фазовые поправки к сигналам приемных каналов таким образом, чтобы скомпенсировать фазовые ошибки поля сферической волны с центром в заданной точке на расстоянии r от центра ФАР по отношению к полю нормально падающей на апертуру плоской волны, осуществляя таким образом фокусировку ФАР в заданной точке, и производит синфазное суммирование сигналов с поправками. Затем суммарный сигнал поступает либо на внутренние измерительные средства ФАР - 12, либо на вход приемного измерительного устройства - 13, где по запросу ЭВМ - 15 производится измерение амплитуды суммарного сигнала с периодичностью At, информация о результате которого поступает на вход ЭВМ - 15, куда также поступают данные о текущем времени с ККС - 14.
Принцип измерения характеристик направленности передающей ФАР, фиг.2, состоит в следующем.
Бортовая антенна - 4 на гиростабилизированном подвесе - 5 с системой управления подвесом - 6, подключенная к анализатору спектра -17 через аттенюатор - 16 в составе радиотехнического блока - 2, с помощью беспилотной авиационной системы (БАС) - 1, содержащей бортовой приемник сигналов ГЛОНАСС - 7 и бортовой накопитель информации - 8, вводится в зону измерений так, что ее фазовый центр находится на расстоянии r от центра исследуемой ФАР - 18, удовлетворяющем условию зоны Френеля
где 
 - расстояния от центра ФАР до границ ближней и дальней зон;
- расстояния от центра ФАР до границ ближней и дальней зон;
D - максимальный размер апертуры;
λ - длина волны излучения.
На систему управлния подвесом - 6 поступают данные о текущем времени и координатах с бортового приемника сигналов ГЛОНАСС - 7. Используя данные о текущих координах, система управления подвесом - 6, в памяти которой находятся координаты центра ФАР, с учетом показаний внутренних датчиков об ориентации БАС, управляет двигателями гиростабилизированного подвеса - 5, так, что подвес ориентирует бортовую антенну - 4 на центр исследуемой ФАР.
По запросу ЭВМ - 15 устройство формирования диаграммы направленности - 20 формирует фазовые поправки к сигналам передающих каналов таким образом, чтобы скомпенсировать фазовые ошибки поля сферической волны с центром в заданной точке на расстоянии г от центра ФАР по отношению к полю излучаемой синфазной апертурой плоской волны, осуществляя таким образом фокусировку ФАР в заданной точке.
Комплекс передающих каналов - 19 генерирует сфокусированное излучение длиной волны Я, которое принимается бортовой антенной - 4 на борту БАС - 1, далее принятый сигнал через аттенюатор - 16 поступает на анализатор спектра - 17, который производит измерение амплитуды сигнала. С периодичностью Δt на вход бортового накопителя информации - 8 поступают данные измерений с выхода анализатора спектра - 17 и координаты БАС в момент измерения с бортового приемника ГЛОНАСС - 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОРИЕНТАЦИИ БОРТОВОЙ АНТЕННЫ БЕСПИЛОТНОГО КОМПЛЕКСА ДЛЯ ИЗМЕРЕНИЙ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕНН | 2019 |
|
RU2704393C1 |
| СИСТЕМА ДОСТАВКИ ЭНЕРГИИ НА БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО | 2022 |
|
RU2829194C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕННЫ С ПОМОЩЬЮ БПЛА МЕТОДОМ ОБЛЕТА | 2016 |
|
RU2626561C1 |
| Способ контроля диаграммы направленности антенны облетным методом с помощью БПЛА | 2022 |
|
RU2836791C2 |
| СПОСОБ ИЗМЕРЕНИЯ ШИРИНЫ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2023 |
|
RU2807022C1 |
| СПОСОБ И СИСТЕМА АНТЕННЫХ ИЗМЕРЕНИЙ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ПРИВЯЗНОГО АЭРОСТАТА | 2023 |
|
RU2818996C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2024 |
|
RU2822401C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ В ДАЛЬНЕЙ ЗОНЕ МЕТОДОМ ОБЛЕТА С ПОМОЩЬЮ БЛА | 2021 |
|
RU2758979C1 |
| СПОСОБ КОНТРОЛЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЁТКИ | 2018 |
|
RU2691378C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ ПРИЕМО-ПЕРЕДАЮЩЕЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2021 |
|
RU2781246C1 |



Использование: изобретение относится к измерительной технике и может быть использовано для измерения диаграмм направленности (ДН) фазированных антенных решеток (ФАР) с помощью беспилотных авиационных систем (БАС), содержащих радиотехнический блок, приемник ГЛОНАСС и ориентируемую на центр ФАР бортовую антенну. Технический результат: уменьшение требуемой высоты подъема БАС и сокращение времени измерений. Сущность: ФАР фокусируют на заданное расстояние в зоне Френеля, а БАС либо совершает облет ФАР по сферической поверхности, выдерживая то же расстояние между ФАР и бортовой антенной (п. 1), либо зависает в точке фокусировки (п. 2). Во втором случае ФАР последовательно перефокусируют по направлению с сохранением расстояния фокусировки таким образом, чтобы бортовая антенна оказывалась в контрольных точках ДН, и производят измерения динамической диаграммы направленности (ДДН). В случае исследования ДН передающей ФАР, измерения мощности поля производятся непосредственно на борту БАС с помощью анализатора спектра в составе радиотехнического блока. В случае измерения ДН приемной ФАР, регистрация амплитуды сигнала производится посредством приемного измерительного устройства, подключенного к испытуемой ФАР, или внутренними измерительными средствами ФАР. Для повышения точности измерений в процессе постобработки и построения ДН в результат вносятся поправки на основе данных о положении БАС относительно исследуемой ФАР в момент измерений. Определение глобальных координат БАС выполняется посредством бортового приемника сигналов ГЛОНАСС. Необходимая точность измерения достигается за счет коррекции ошибок измерения глобальных координат путем учета полученных с контрольно-корректирующей станции (ККС) дифференциальных поправок и удержанием ориентации бортовой антенны на центр ФАР с помощью гиростабилизированного подвеса. Синхронизация данных измерений амплитуды сигнала, координат БАС и направления перефокусировки ФАР производится в процессе постобработки по временным меткам, полученным с приемника ГЛОНАСС на борту БАС и с ККС на Земле. Дополнительным техническим результатом является повышение точности измерений ДН ФАР. 2 з.п. ф-лы, 4 ил.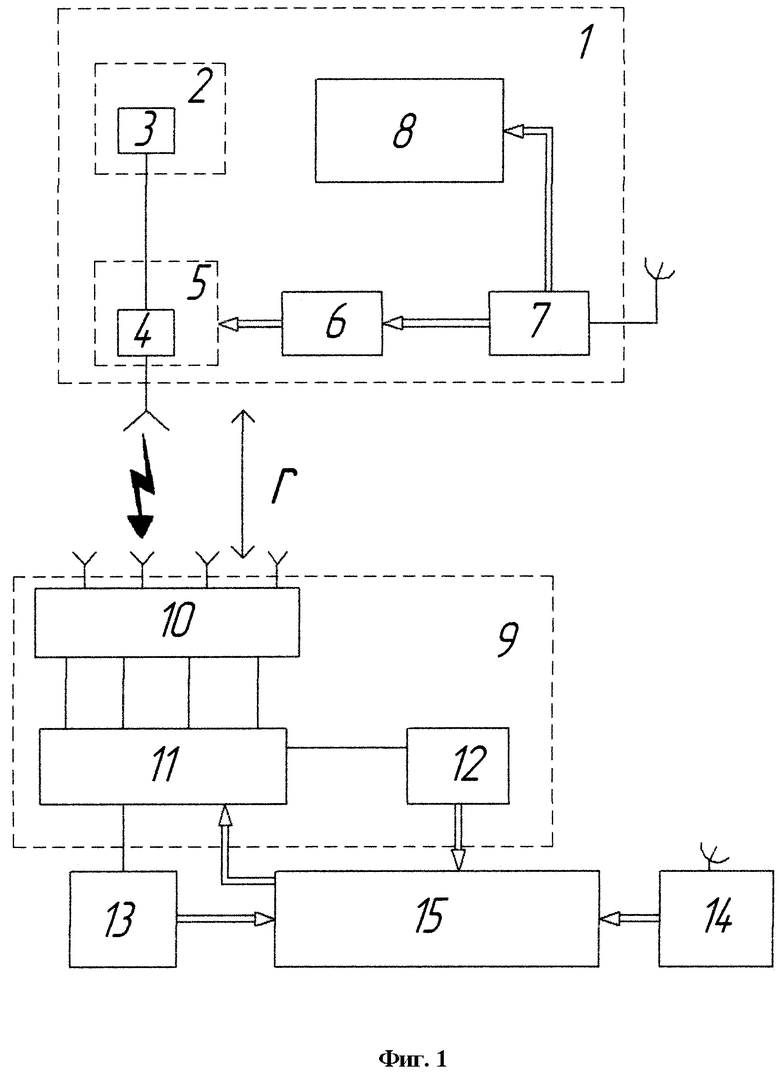
1. Способ измерения характеристик направленности фазированной антенной решетки (ФАР), основанный на применении беспилотной авиационной системы (БАС), содержащей радиотехнический блок, приемник ГЛОНАСС и ориентируемую на центр ФАР бортовую антенну, отличающийся тем, что, с целью уменьшения требуемой высоты подъема БАС и сокращения времени измерений, измерения проводятся в зоне Френеля при фокусировке ФАР на расстояние, равное расстоянию от центра ФАР до бортовой антенны БАС.
2. Способ измерения характеристик направленности ФАР по п. 1, отличающийся тем, что, с целью дополнительного сокращения времени измерений, проводятся измерения динамической диаграммы направленности в условиях зависания БАС в заданной точке и последовательной перефокусировки ФАР на углы, соответствующие контрольным точкам диаграммы направленности (ДН) с сохранением расстояния фокусировки (метод «виртуальной вышки»).
3. Способ измерения параметров направленности ФАР по п. 1, отличающийся тем, что, с целью повышения точности измерения, синхронизация данных измерений и координат БАС с учетом дифференциальных поправок производится в процессе постобработки по временным меткам, полученным с приемников ГЛОНАСС на борту БАС и с контрольно-корректирующей станции на Земле.
| Elena M | |||
| Dobychina et al | |||
| "Unmanned Aerial Vehicle Antenna Measurement Using Anechoic Chamber" TEM Journal | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Yury V | |||
| Krivosheev et al | |||
| "Fresnel Field to Far Field Transformation Based on Two-Dimensional Fourier Series Expansion" | |||
| ADVANCED ELECTROMAGNETICS | |||
