Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано на локомотивах и моторвагонных подвижных составах для определения местоположения и маршрута следования поезда по электронной карте прибора безопасности.
Известно устройство корректировки линейной координаты нахождения поезда, содержащее подключенный к вычислительному блоку датчик пути и скорости, установленный на оси колесной пары локомотива или головного вагона электропоезда и связанный с этой осью поводковой муфтой. Имеются две последовательно соединенные приемные катушки, подключенные свободными выводами ко входу локомотивного приемника. Выход приемника через первый блок сопряжения подключен к вычислительному блоку. Последний выполнен с возможностью вычисления по частоте повторения импульсов скорости движения поезда, а по их количеству - величины пройденного пути с момента начала движения поезда и с возможностью определения линейной координаты границы преследуемого блок-участка пути на основании анализа поступающего с выхода приемника кодового импульсного сигнала системы автоматической локомотивной непрерывной сигнализации и выдачи сигнала о проследовании границы блок-участка и данных о внесении необходимой поправки на вычисленную величину пройденного пути. На буксовом узле локомотива или головного вагона установлен датчик ускорений, срабатывающий при проследовании колесной пары через стык. Датчик ускорений через второй блок сопряжения подключен к вычислительному блоку, осуществляющему по сигналу, поступившему от датчика ускорений, уточнение линейной координаты границы преследуемого блок-участка (RU 2248291, B61L 25/00, 20.03.2005).
Недостатком известного устройства является ограниченность области применения, а именно возможность применения только на участках, оборудованных аппаратурой АЛСН числового кода.
Наиболее близким аналогом является устройство корректировки линейной координаты нахождения поезда, содержащее вычислительный блок, к которому подключен датчик пути и скорости, установленный на оси колесной пары локомотива или головного вагона электропоезда и связанный с этой осью поводковой муфтой. Две последовательно соединенные приемные катушки установлены на тележке локомотива или головного вагона электропоезда. Свободные выводы катушек подключены ко входу локомотивного приемника, выход которого через первый блок сопряжения подключен к вычислительному блоку. На буксовом узле локомотива или головного вагона электропоезда установлен датчик ускорений, который через второй блок сопряжения подключен к вычислительному блоку. Предусмотрен приемник сигналов путевых генераторов системы автоблокировки, вход которого подключен либо к свободным выводам имеющихся приемных катушек, либо к свободным выводам отдельных дополнительных приемных катушек со встречно-последовательно включенными обмотками. Выход приемника через третий блок сопряжения подключен к вычислительному блоку (RU 2290335, B61L 25/00, 27.12.2006).
Известное устройство определяет местоположение и маршрут следования поезда. Недостатком известного устройства является ограниченность функциональных возможностей, связанная с тем, что оно не позволяет автоматически переключать электронную карту маршрута текущего участка на новый актуальный участок электронной карты при переходе поезда на другой железнодорожный путь разветвленной путевой инфраструктуры. В устройстве управления движением поезда, в местах, имеющих разветвленное путевое развитие, но не оборудованных дополнительными путевыми датчиками (датчики САУТ, радиочастотной идентификации и т.д.), это требует ручного переключения электронной карты маршрута на новый ее участок.
Ручное переключение электронной карты маршрута сопряжено с ошибками, допускаемыми машинистами, и замедляет движение поезда.
Технический результат заключается в повышении надежности определения местоположения и маршрута поезда за счет уточнения линейной координаты его местоположения с привязкой к существующим элементам инфраструктуры пути на различных участках железных дорог, оборудованных как аппаратурой числового кода, так и тональными рельсовыми цепями, в том числе в местах разветвления путевого развития, без введения дополнительных элементов в путевую аппаратуру и возможности переключения электронной карты маршрута при переходе поезда на другой железнодорожный путь разветвленной путевой инфраструктуры.
Указанный технический результат достигается тем, что устройство определения местоположения и маршрута следования поезда содержит модуль измерения координаты по данным колесного датчика, модуль спутникового навигатора, модуль контроля рельсовой линии, модуль контроля границ рельсовой цепи, модуль контроля прохождения изолирующего стыка выходы которых через межмодульный интерфейс соединены с соответствующими входами модуля уточнения текущей координаты на электронной карте маршрута, вход/выход которого подключен к первому входу/выходу модуля электронной карты маршрута, модуль распознавания объектов, соединенный первым входом/выходом с модулем базы данных изображений объектов инфраструктуры, а вторым входом/выходом - через межмодульный интерфейс с входом/выходом модуля уточнения текущей координаты на электронной карте маршрута, выход которого связан с входом модуля выбора актуального фрагмента электронной карты маршрута, первый вход/выход которого взаимодействует со вторым выходом/входом модуля электронной карты маршрута, а второй вход/выход - с входом/выходом модуля дисплея машиниста.
При этом устройство также содержит модуль ручного назначения маршрута, выход которого подключен к соответствующему входу модуля выбора актуального фрагмента электронной карты маршрута.
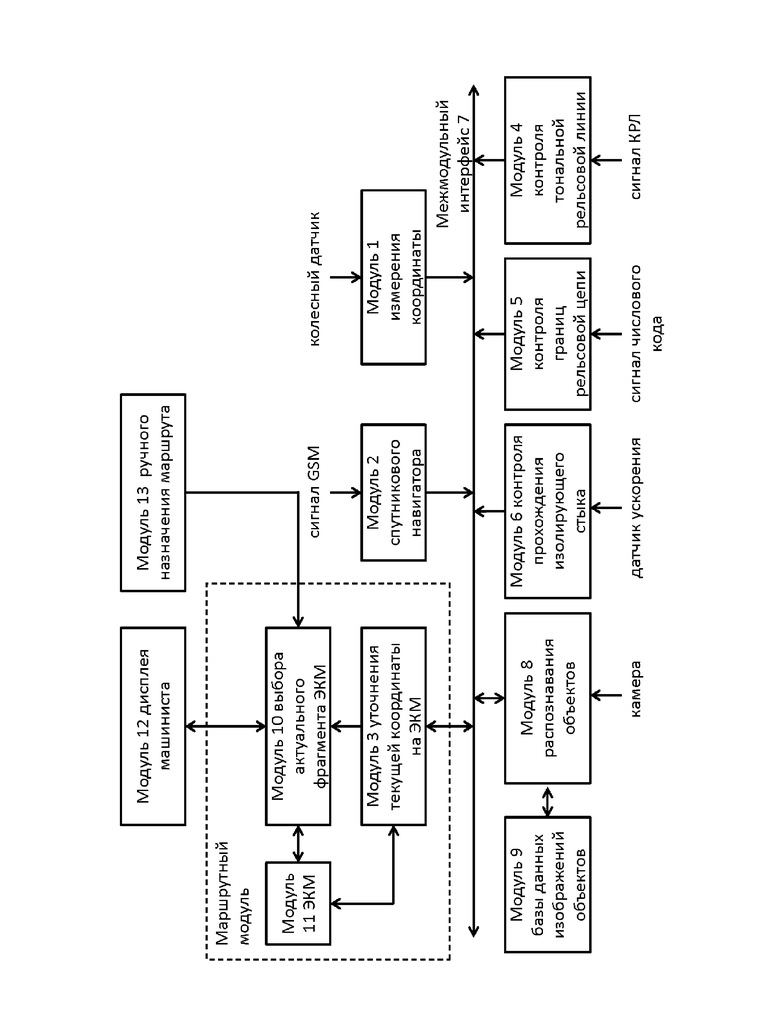
Сущность изобретения поясняется чертежом, на котором представлена структурная блок схема устройства определения местоположения и маршрута следования поезда.
Устройство определения местоположения и маршрута следования поезда содержит модуль 1 измерения координаты по данным колесного датчика, модуль 2 спутникового навигатора, модуль 4 контроля рельсовой линии, модуль 5 контроля границ рельсовой цепи, модуль 6 контроля прохождения изолирующего стыка выходы которых через межмодульный интерфейс 7 соединены с соответствующими входами модуля 3 уточнения текущей координаты на электронной карте маршрута, вход/выход которого подключен к первому входу/выходу модуля 11 электронной карты маршрута, модуль 8 распознавания объектов, соединенный первым входом/выходом с модулем 9 базы данных изображений объектов инфраструктуры, а вторым входом/выходом - через межмодульный интерфейс 7 с входом/выходом модуля 3 уточнения текущей координаты на электронной карте маршрута, выход которого связан с входом модуля 10 выбора актуального фрагмента электронной карты маршрута, первый вход/выход которого взаимодействует со вторым выходом/входом модуля 11 электронной карты маршрута, а второй вход/выход - с входом/выходом модуля 12 дисплея машиниста.
При этом устройство содержит модуль 13 ручного назначения маршрута, выход которого подключен к соответствующему входу модуля 10 выбора актуального фрагмента электронной карты маршрута.
Устройство определения местоположения и маршрута следования поезда работает следующим образом.
Во время движения подвижного состава модуль 2 спутниковой навигации, установленный на локомотиве, получает координаты его местоположения на контролируемом участке пути в формате сигналов GPS/ГЛОНАСС и передает полученную информацию в модуль 3 уточнения координаты текущей координаты поезда на электронной карте маршрута (ЭКМ) посредством межмодульного интерфейса. Модуль 3 уточнения координаты текущей координаты на ЭКМ и модуль 10 выбора актуального фрагмента ЭКМ входят в состав маршрутного модуля, содержащего модуль 11 электронной карты маршрута с указанием координат мест расположения путевых генераторов, границ рельсовых цепей и мест установки изолирующих стыков, а также координат основных объектов инфраструктуры, имеющих уникальные идентификаторы (мосты, тоннели, светофоры, здания, тяговые подстанции, стрелочные переводы и др.). Модуль 3 уточнения координаты текущей координаты на ЭКМ и модуль 10 выбора актуального фрагмента ЭКМ осуществляют постоянное взаимодействие с модулем 11 ЭКМ.
Модуль 1 измерения координаты измеряет пройденный путь по данным колесного датчика, при этом из-за юза и боксования, а также износа бандажа колес накапливается погрешность в измерении пройденного пути при использовании колесного датчика, что вызывает необходимость уточнения координаты. Для этого ежесекундно модуль 1 измерения координаты по межмодульному интерфейсу 7 передает измеренную координату в модуль 3 уточнения текущей координаты на ЭКМ для фиксации и дальнейшей обработки.
Модуль 4 контроля рельсовой линии осуществляет анализ уровня сигнала контроля тональной рельсовой линии (КРЛ) и при резком падении уровня сигнала от путевого генератора делает вывод о его проследовании. Информация о факте проследования путевого генератора через межмодульный интерфейс 7 в виде сообщения передается в модуль 3 уточнения текущей координаты на ЭКМ для фиксации и дальнейшей обработки.
Посредством модуля 5 контроля границ рельсовой цепи осуществляется оценка характера сигнала числового кода на границе рельсовой цепи. Сигнал числового кода, передаваемый по рельсовым цепям, содержит информацию о конкретных участках пути и изменяется при пересечении поездом границ этих участков. Однако, из-за различных факторов, таких как электромагнитные помехи, износ рельсов и контактных элементов, а также изменения в окружающей среде, сигнал может быть искажен или зашумлен, что приводит к погрешности в определении точной координаты. Модуль 5 контроля границ рельсовой цепи анализирует эти сигналы и при наличии изменения характера сигнала на величину большую, чем допустимая погрешность, делает вывод о проследовании границы рельсовой цепи. Информация о факте проследования границы рельсовой цепи в виде сообщения передается по межмодульному интерфейсу 7 в модуль 3 уточнения текущей координаты на ЭКМ для фиксации и дальнейшей обработки.
Модуль 6 контроля прохождения изолирующего стыка анализирует вертикальную составляющую показаний инерционного датчика ускорения, и при изменении вертикальной составляющей (характерный скачок значения) делает вывод о проследовании изолирующего стыка, а информация о проследовании изолирующего стыка поступает по межмодульному интерфейсу 7 в виде сообщения в модуль 3 уточнения текущей координаты на ЭКМ для фиксации и дальнейшей обработки.
По данным модуля 11 ЭКМ при приближении к объектам железнодорожной инфраструктуры модуль 3 уточнения текущей координаты на ЭКМ отправляет команду в модуль 8 распознавания объектов для осуществления направленной фотосъемки объектов инфраструктуры с помощью камер, установленных на локомотиве (на схеме не показана).
Данные, полученные с камер изображения, обрабатываются в модуле 8 распознавания объектов с применением алгоритмов компьютерного зрения и машинного обучения для детального анализа изображений инфраструктурных объектов. Эти алгоритмы, при помощи сегментации изображения, детекции границ, фильтрации шума, способны извлекать специфические признаки объектов – образы (образ – это описание объекта, позволяющее выделять его из окружающей среды и группировать с другими объектами для принятия необходимых решений), включая их геометрические параметры, цветовые характеристики, текстурные особенности и прочие уникальные атрибуты. Посредством анализа данных фотосъемки и идентификации образов модуль 8 распознавания объектов осуществляет дополнительную идентификацию событий, связанных с переходом поезда на новый путь. В рамках этого процесса определяются следующие параметры: прохождение стрелочного перевода в плюсовом положении, прохождение стрелочного перевода в минусовом положении, инициация движения, прекращение движения, а также идентификация типа и номера стрелочного перевода, типа и маркировки светофора.
Полученные модулем 8 распознавания объектов образы передаются в модуль 9 базы данных изображений объектов инфраструктуры, где хранится база данных библиотеки образов объектов инфраструктуры каждый из которых снабжен метаданными, такими, как описание этого объекта, и его уникальный идентификатор. Идентификация объекта проводится путем сравнения полученного образа с образами в базе данных.
По результатам сравнения модуль 9 базы данных изображений объектов инфраструктуры отправляет в ответ модулю 8 распознавания объектов результат идентификации (его уникальный идентификатор объекта). Модуль 8 распознавания объектов передает полученный идентификатор в модуль 3 уточнения текущей координаты на ЭКМ для дальнейшего уточнения текущей координаты.
В случае возникновения расхождений полученного и ожидаемого идентификатора или получении от модуля 8 распознавания объектов кода ошибки распознавания, модуль 3 уточнения текущей координаты на ЭКМ определяет необходимость повторного получения данных.
Ошибки могут возникать из-за нечеткости изображений, изменения условий освещения, повреждения или загрязнения объектов, а также из-за ошибок в алгоритмах распознавания. В этом случае модуль 3 уточнения текущей координаты на ЭКМ инициирует повторную фотосъемку и дальнейшую повторную идентификацию.
Модуль 3 уточнения текущей координаты на ЭКМ осуществляет процесс интеграции данных, полученных от модулей 1, 2, 4, 5, 6 и 8. Встроенный алгоритм модуля 3 уточнения текущей координаты на ЭКМ выполняет следующие шаги:
1. Сбор данных: модуль 3 уточнения текущей координаты на ЭКМ получает информацию о текущих координатах, скорости, ускорении и других параметрах движения от модулей 1, 2, 4, 5, 6 и 8.
2. Оценку достоверности: алгоритм оценивает достоверность и точность каждого источника данных, учитывая предысторию и текущие условия.
3. Комбинирование данных: на основе оценки достоверности, модуль 3 уточнения текущей координаты на ЭКМ комбинирует данные, чтобы получить наиболее точное и достоверное представление о текущем местоположении локомотива.
4. Корректировку координат: используя комбинированные данные, модуль 3 уточнения текущей координаты на ЭКМ корректирует линейную координату местоположения локомотива на ЭКМ.
5. Передачу информации: после корректировки координат, модуль 3 уточнения текущей координаты на ЭКМ передает уточненные данные о местоположении в модуль 10 выбора актуального фрагмента ЭКМ.
Модуль 3 уточнения текущей координаты на ЭКМ передает в модуль 10 выбора актуального фрагмента ЭКМ информацию в виде уточненных координат местоположения локомотива для выбора и обновления актуального фрагмента ЭКМ. Модуль 10, получив актуальные координаты, анализирует текущее местоположение поезда, предыдущие и последующие участки пути, а также информацию о разветвлениях и переключениях путей на электронной карте маршрута, определяет объекты инфраструктуры на пути следования локомотива (стрелочные переводы, светофоры, путевые генераторы и т.д.), сортирует объекты в порядке их приближения к поезду.
Модуль 10 передает в модуль 12 дисплея машиниста данные, необходимые для своевременного информирования машиниста о ближайшем объекте инфраструктуры и его основных характеристиках, таких как координаты, расстояние от подвижного состава до объекта, разрешенная скорость прохождения и др.
Допускается одновременный ввод информации о маршруте следования от двух источников для повышения надежности работы устройства. При ручном вводе информация о номере пути, введенная машинистом с помощью модуля 13 ручного назначения маршрута, попадает в модуль 10 выбора объектов актуального маршрута следования.
Таким образом, интегрированная работа всех модулей устройства определения местоположения и маршрута следования поезда обеспечивает комплексный подход к управлению движением. Каждый модуль выполняет свою специфическую функцию, а совокупность этих функций создает единую систему, способную адаптироваться к различным условиям и обеспечивать высокую точность и надежность управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система контроля за управлением локомотивом попутно следующих поездов | 2024 |
|
RU2823661C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2513883C1 |
| Устройство контроля за управлением локомотивом и бдительностью машиниста | 2021 |
|
RU2766936C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2009 |
|
RU2423269C1 |
| Устройство контроля за управлением локомотивом | 2022 |
|
RU2790738C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2012 |
|
RU2497704C2 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2011 |
|
RU2499713C2 |
| Система управления движением поездов по перегону | 2022 |
|
RU2783558C1 |
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики. Устройство определения местоположения и маршрута следования поезда содержит модуль измерения координаты по данным колесного датчика, модуль спутникового навигатора, модуль контроля рельсовой линии, модуль контроля границ рельсовой цепи, модуль контроля прохождения изолирующего стыка, выходы которых через межмодульный интерфейс соединены с соответствующими входами модуля уточнения текущей координаты на электронной карте маршрута, вход/выход которого подключен к первому входу/выходу модуля электронной карты маршрута. Устройство также содержит модуль распознавания объектов, соединенный первым входом/выходом с модулем базы данных изображений объектов инфраструктуры, а вторым входом/выходом – через межмодульный интерфейс с модулем уточнения текущей координаты на электронной карте маршрута. Выход модуля уточнения текущей координаты на электронной карте маршрута связан с входом модуля выбора актуального фрагмента электронной карты маршрута, первый вход/выход которого взаимодействует со вторым выходом/входом модуля электронной карты маршрута, а второй вход/выход – с входом/выходом модуля дисплея машиниста. Технический результат заключается в повышении надежности определения местоположения и маршрута поезда. 1 з.п. ф-лы, 1 ил.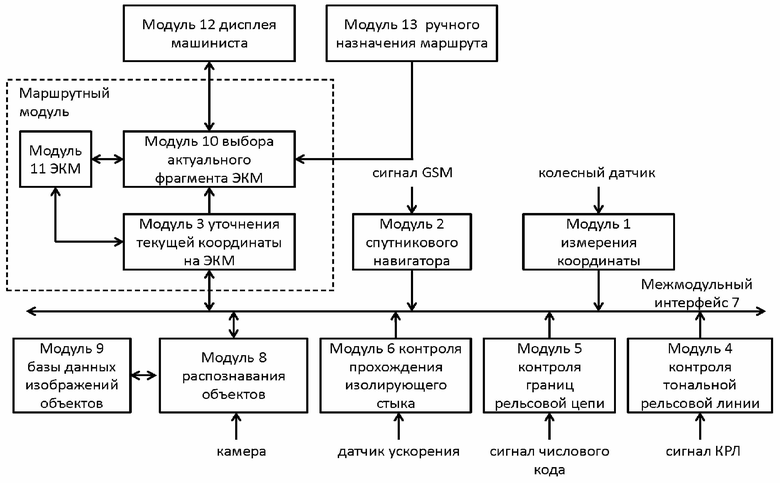
1. Устройство определения местоположения и маршрута следования поезда, содержащее модуль измерения координаты по данным колесного датчика, модуль спутникового навигатора, модуль контроля рельсовой линии, модуль контроля границ рельсовой цепи, модуль контроля прохождения изолирующего стыка, выходы которых через межмодульный интерфейс соединены с соответствующими входами модуля уточнения текущей координаты на электронной карте маршрута, вход/выход которого подключен к первому входу/выходу модуля электронной карты маршрута, отличающееся тем, что включает модуль распознавания объектов, соединенный первым входом/выходом с модулем базы данных изображений объектов инфраструктуры, а вторым входом/выходом - через межмодульный интерфейс с входом/выходом модуля уточнения текущей координаты на электронной карте маршрута, выход которого связан с входом модуля выбора актуального фрагмента электронной карты маршрута, первый вход/выход которого взаимодействует со вторым выходом/входом модуля электронной карты маршрута, а второй вход/выход - с входом/выходом модуля дисплея машиниста.
2. Устройство по п. 1, отличающееся тем, что содержит модуль ручного назначения маршрута, выход которого подключен к соответствующему входу модуля выбора актуального фрагмента электронной карты маршрута.
| БОРТОВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ВЫСОКОСКОРОСТНОГО ПОЕЗДА | 2003 |
|
RU2238208C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| УСТРОЙСТВО КОРРЕКТИРОВКИ ЛИНЕЙНОЙ КООРДИНАТЫ НАХОЖДЕНИЯ ПОЕЗДА | 2005 |
|
RU2290335C1 |
| WO 2021226786 A1, 18.11.2021. | |||

