ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к области техники электрического экскаватора и, в частности, относится к способу управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0002] Электрический экскаватор, также называемый канатным экскаватором или стальным тросовым экскаватором, то есть механический электрический экскаватор, представляет собой одноковшовый экскаватор, использующий для передачи мощности такие компоненты передачи, как шестерни, цепи и группы тросовых шкивов. Карьерный электрический экскаватор обычно используют для добычи угля в открытых рудниках. Из-за низкой эффективности добычи угля при традиционном ручном управлении карьерным электрическим экскаватором и в случае появления крупного блока угольной породы при использовании карьерного электрического экскаватора в процессе выемки грунта, операторы обычно приспосабливают способы увеличения выходной мощности двигателя или прекращения работы по выемке грунта для борьбы с ними, что легко приводит к явлениям «перегрузки», «недобора» и т.п., приводящие к сокращению срока службы двигателя передачи и некачественной скорости заполнения ковша экскаватора материалом. Следовательно, необходимо срочно изобрести способ управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Целями настоящего изобретения являются предоставить способ управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения. А способ может реализовывать автоматические работы по добыче полезных ископаемых карьерным электрическим экскаватором в процессе добычи полезных ископаемых с помощью вспомогательного зрения.
[0004] Для достижения вышеуказанных целей предложен способ управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения. При этом способ включает следующие этапы.
[0005] На этапе S1 бинокулярную камеру калибруют с помощью набора инструментов Matlab. После завершения калибровки бинокулярную камеру устанавливают в центре передней стрелы карьерного электрического экскаватора для извлечения морфологических признаков вынутой груды материала.
[0006] На этапе S2 устанавливают пространственные системы координат путем взятия O0, O1, O2, O3 в качестве исходных точек на стыке карьерного электрического экскаватора и в центре бинокулярной камеры соответственно. А упреждающая кинематика рабочего устройства карьерного электрического экскаватора получена посредством метода D-H.
[0007] На этапе S3 выбирают соответствующие начальные и конечные положения для первой выемки грунта с помощью трехмерной модели груды материала в Matlab.
[0008] На этапе S4 функцию  выбирают в качестве траектории первой выемки грунта карьерного электрического экскаватора, а ожидаемую траекторию удлинения d рукояти стрелы и ожидаемую траекторию угла наклона θ получают с использованием упреждающей кинематики карьерного электрического экскаватора и отношения геометрии на плоскости. Команды передаются на двигатели переменного тока переменной частоты посредством ожидаемой траектории удлинения d рукояти стрелы и ожидаемой траектории угла наклона θ, а исполнительный механизм карьерного электрического экскаватора приводят в действие для осуществления работы по выемке грунта.
выбирают в качестве траектории первой выемки грунта карьерного электрического экскаватора, а ожидаемую траекторию удлинения d рукояти стрелы и ожидаемую траекторию угла наклона θ получают с использованием упреждающей кинематики карьерного электрического экскаватора и отношения геометрии на плоскости. Команды передаются на двигатели переменного тока переменной частоты посредством ожидаемой траектории удлинения d рукояти стрелы и ожидаемой траектории угла наклона θ, а исполнительный механизм карьерного электрического экскаватора приводят в действие для осуществления работы по выемке грунта.
[0009] На этапе S5 отслеживают в режиме реального времени с помощью датчика усилия, установленного на части передачи, существует ли крупный блок угольной породы в направлении выемки грунта ковша в процессе выемки грунта карьерным электрическим экскаватором. В случае, когда в ковше отслеживают крупный блок угольной породы, записывают текущее положение текущей вершины зубцов ковша, а работу по выемке грунта прекращают.
[0010] На этапе S6 крупный блок угольной породы перед направлением выемки грунта ковша обходят путем приспособления метода планирования нисходящих путей выемки грунта.
[0011] На этапе S7 выбирают начальные и конечные положения для второй выемки грунта и функцию  траектории добычи полезных ископаемых.
траектории добычи полезных ископаемых.
[0012] На этапе S8 ожидаемую траекторию удлинения d рукояти стрелы и ожидаемую траекторию угла наклона θ получают с использованием упреждающей кинематики карьерного электрического экскаватора и отношения геометрии на плоскости, тем самым продолжая выполнение всей работы по выемке грунта.
[0013] Кроме того, на этапе S1 для калибровки бинокулярной камеры принимают среднее калибровки шахматной доски, а в качестве калибровочных образцов берут несколько наборов фотографий шахматной доски с разными направлениями и углами.
[0014] Кроме того, на этапе S1 метод извлечения морфологических признаков вынутой груды материала, в частности, включает следующие этапы.
[0015] Получают изображения вынутой груды материала, при этом изображения груды материала, подлежащего выемке, фиксируют и получают посредством установленной бинокулярной камеры.
[0016] Изображения корректируют, выполняют корректировку искажений и стерео корректировку полученных изображений груды материала.
[0017] Извлекают признаки, обнаруживают и извлекают точки признаков из изображений левого объектива груды материала и изображений правого объектива груды материала.
[0018] Выполняют стерео согласование, причем стерео согласования изображений левого объектива и изображений правого объектива выполняют с использованием извлеченных точек признаков и получают карту диспаратности груды материала.
[0019] Пустоты заполняют, недопустимые ошибки, вызванные неравномерным освещением, обрабатывают с использованием метода заполнения средними значениями.
[0020] Диспаратность преобразуют в глубину, обработанную карту диспаратности преобразуют в карту глубины посредством геометрического метода.
[0021] Выполняют 3D-реконструкцию, после чего карту глубины преобразуют в данные облака точек посредством преобразования координат, при этом данные облака точек импортируют в Matlab и представляют в виде стереокарты.
[0022] Кроме того, на этапе S2 пространственные системы координат устанавливают путем взятия O0, O1, O2, O3 в качестве исходных точек на стыке карьерного электрического экскаватора и в центре бинокулярной камеры соответственно. X0, Y0, X1, Z1, X2, Z2, X3, и Y3 находятся на одной плоскости, Z0, Y1, Y2, и Z3 перпендикулярны плоскости, оси координат X0 и X3 ориентированы горизонтально вправо, оси координат Y0 и Y3 ориентированы вертикально вверх, ось координат X1 параллельна оси координат X2, направление - вдоль стрелы экскаватора; ось координат Z1 параллельна оси координат Z2, а направление - вдоль стрелы экскаватора.
[0023] Кроме того, на этапе S4 выбирают траекторию первой выемки грунта карьерного электрического экскаватора в виде логарифмической спирали 
[0024] Кроме того, на этапе S5 методом отслеживания крупного блока угольной породы является наблюдение за показаниями датчика усилия, в случае, когда верхний предел колебания превышает заданный пороговое значение, определяют, что крупный блок угольной породы существует перед направлением выемки грунта ковша карьерного электрического экскаватора.
[0025] Кроме того, на этапе S6 метод планирования нисходящих путей выемки грунта включает следующие этапы.
[0026] (1) Сначала вершину зубцов ковша перемещают горизонтально назад на расстояние S.
[0027] (2) Затем вершину зубцов ковша перемещают вертикально вниз на расстояние H.
[0028] (3) В конце концов, вершину зубцов ковша перемещают горизонтально вперед на расстояние S до точки,  расположенной непосредственно под точкой остановки первой выемки грунта
расположенной непосредственно под точкой остановки первой выемки грунта 
[0029] (4) Отслеживается, превышают ли показания датчика усилия пороговое значение в данный момент времени, в случае, когда показания превышают пороговое значение, вершину зубцов ковша продолжают перемещать горизонтально назад на расстояние S, затем перемещают вертикально вниз на расстояние H и, в конце концов, перемещают горизонтально вперед на расстояние S до точки,  расположенной непосредственно под точкой остановки первой выемки грунта
расположенной непосредственно под точкой остановки первой выемки грунта  и это повторяют последовательно до тех пор, пока показания датчика усилия не превысят пороговое значение.
и это повторяют последовательно до тех пор, пока показания датчика усилия не превысят пороговое значение.
[0030] Кроме того, на этапе S7 начальные и конечные положения для второй выемки грунта представляют собой конечную точку обходного пути и выбранную конечную точку первой выемки грунта соответственно.
[0031] Кроме того, на этапе S7 выбирают траекторию второй выемки грунта карьерного электрического экскаватора в виде логарифмической спирали 
[0032] По сравнению с известным уровнем техники выгодные эффекты настоящего изобретения являются следующими.
[0033] (1) Настоящее изобретение объединяет машинное зрение с карьерным электрическим экскаватором, что позволяет автоматизировать работы карьерного электрического экскаватора и повысить уровень автоматизации карьерного электрического экскаватора.
[0034] (2) В настоящем изобретении получена упреждающая кинематика рабочего устройства карьерного электрического экскаватора посредством метода D-H и путем установления пространственной системы координат, которая может точно управлять выемкой грунта ковшом.
[0035] (3) За счет использования автоматического отслеживания крупных угольных пород и формулирования разумных обходных путей настоящее изобретение может решить проблемы, такие как «перегрузка» и «недобор» карьерных электрических экскаваторов, возникающие при столкновении с крупным блоком угольной породы во время выемки грунта при традиционных ручных операциях, тем самым увеличивая срок службы двигателя передачи и обеспечивая полную скорость ковша вынутых материалов.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
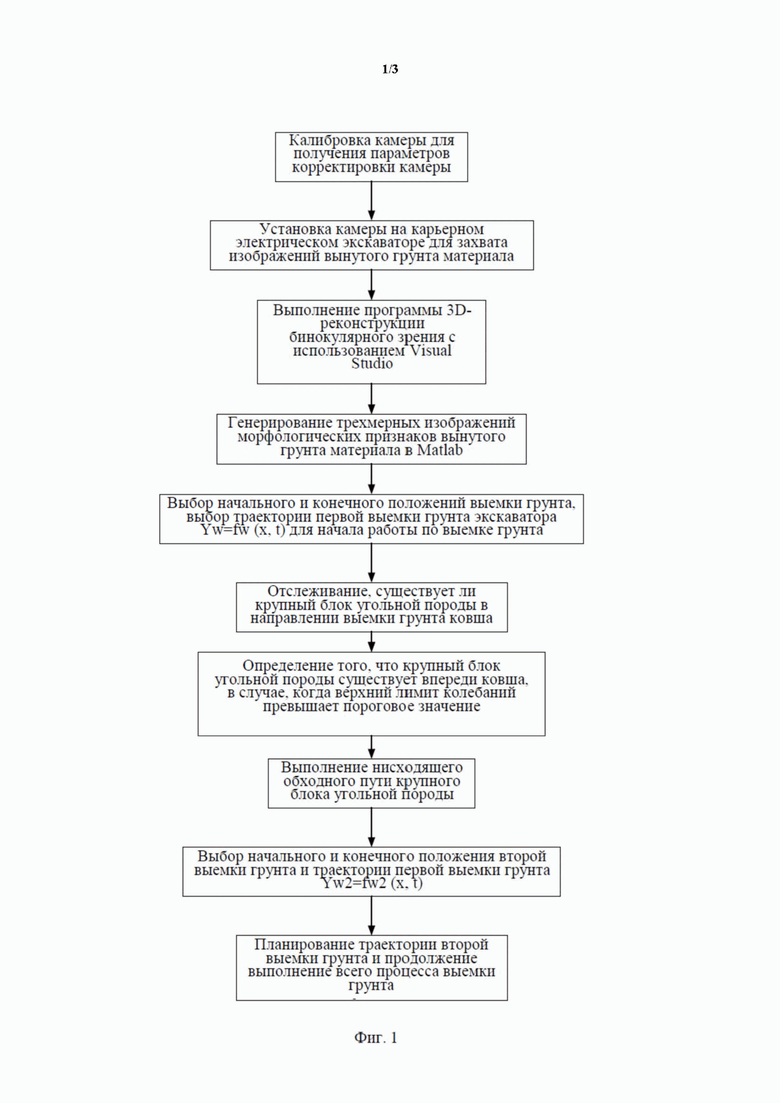
[0036] На фиг. 1 показана блок-схема способа управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения в настоящем изобретении.
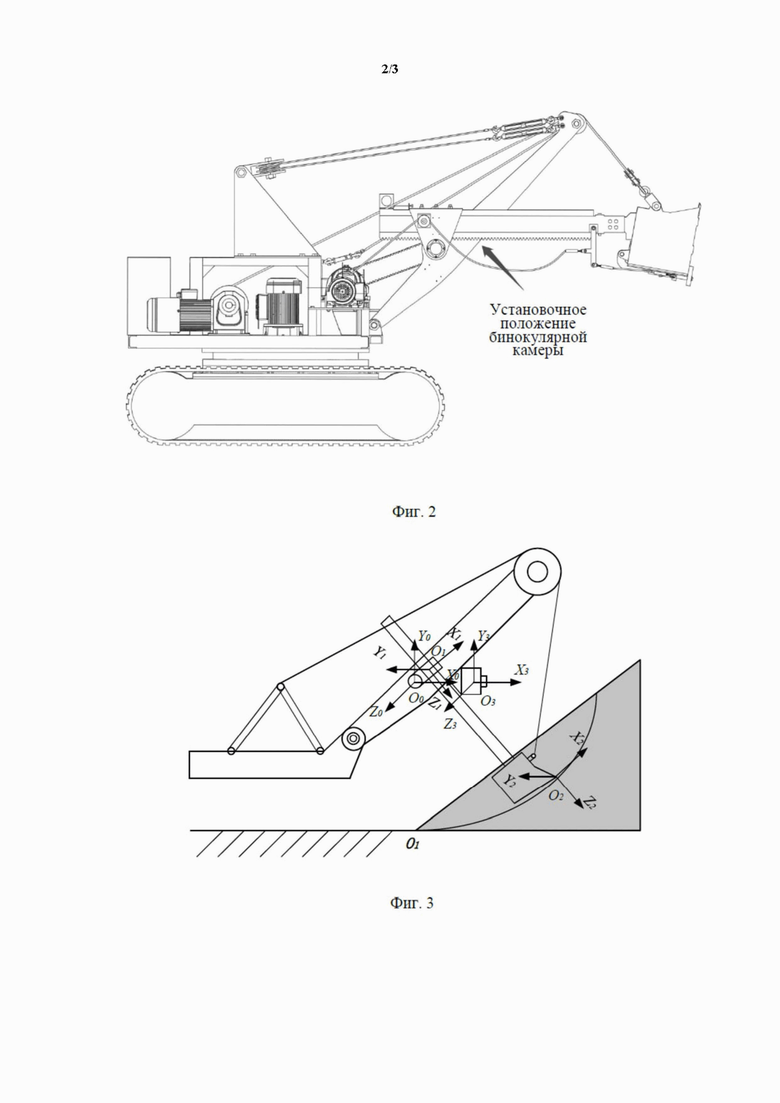
[0037] На фиг. 2 показано схематическое изображение положения установки бинокулярной камеры на карьерном электрическом экскаваторе в настоящем изобретении.
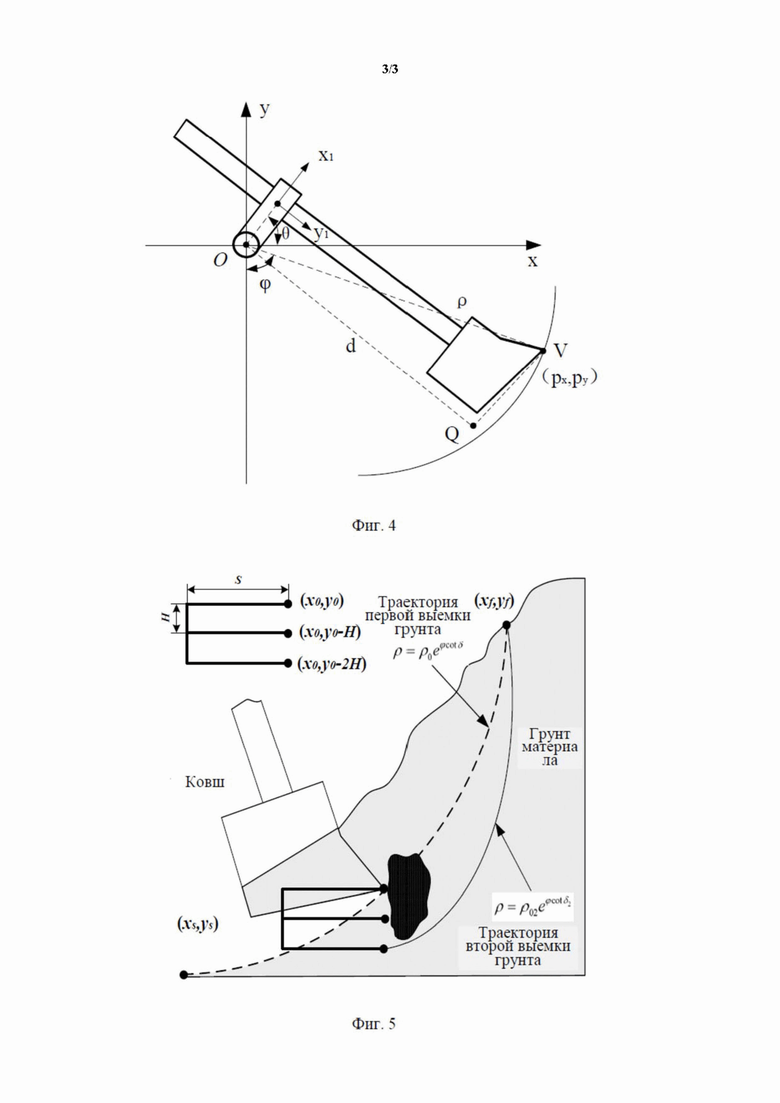
[0038] На фиг. 3 показано схематическое изображение пространственных систем координат карьерного электрического экскаватора в настоящем изобретении.
[0039] На фиг. 4 показано изображение отношения геометрии на плоскости между полярным диаметром ρ, полярным углом ϕ, удлинением d и углом наклона θ настоящего изобретения.
[0040] На фиг. 5 показано изображение схемы планирования пути для обхода крупного блока угольной породы согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0041] Настоящее изобретение будет конкретно описано в сочетании с прилагаемыми графическими материалами и конкретными вариантами осуществления.
[0042] Как изображено на фиг. 1, предоставлен способ управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения. Способ заключается в следующем.
[0043] Сначала выбранную бинокулярную камеру калибруют с использованием набора инструментов калибровки калибратора стереокамеры с двумя целями в Matlab (коммерческое математическое программное обеспечение, произведенное компанией MathWorks в США) и получают параметры, такие как матрица K1 внутренних параметров левого объектива и матрица K2 внутренних параметров правого объектива, векторы D1 и D2 коэффициентов искажения, матрица R вращения и вектор T переноса.
[0044] Затем, как показано на фиг. 2, откалиброванную бинокулярную камеру устанавливают на основании рукояти стрелы ковша карьерного электрического экскаватора посредством болтов, а угол основания регулируют таким образом, чтобы объектив бинокулярной камеры был параллелен плоскости на передней стороне шасси карьерного электрического экскаватора. Visual Studio используют для вызова бинокулярной камеры для захвата изображений вынутой груды материала, а затем выполняют корректировку изображения, извлечение признаков, стерео согласование, заполнение дыр и преобразование глубины для получения файла данных облака точек в формате txt вынутой груды материала.
[0045] Для облегчения планирования последующих способов автоматической выемки грунта необходимо разместить облако точек поверхности груды материала и траекторию выемки грунта в одной и той же системе координат и решить упреждающую кинематическую задачу рабочего устройства карьерного электрического экскаватора.
[0046] Как изображено на фиг. 3, пространственные системы координат устанавливают путем взятия O0, O1, O2, O3 в качестве исходных точек на стыке карьерного электрического экскаватора и в центре бинокулярной камеры соответственно. Три исходные точки устанавливают на стыках, а одну исходную точку устанавливают на бинокулярной камере. X0, Y0, X1, Z1, X2, Z2, X3, и Y3 находятся на одной плоскости, Z0, Y1, Y2, и Z3 перпендикулярны этой плоскости, оси координат X0 и X3 ориентированы горизонтально вправо, оси координат Y0 и Y3 ориентированы вертикально вверх, ось координат X1 параллельна оси координат X2, направление - вдоль стрелы экскаватора; ось координат Z1 параллельна оси координат Z2, а направление - вдоль стрелы экскаватора. Предполагается, что θ - угол поворота электрического экскаватора от оси координат X0 до оси координат X1 вокруг оси координат Z0, L1 - расстояние вдоль оси координат X1 между исходной точкой O0 стыка 0 системы координат и исходной точкой O1 стыка 1 системы координат, d - расстояние вдоль оси координат Z2 между исходной точкой O1 стыка 1 системы координат и исходной точкой O2 стыка 2 системы координат, L2 - расстояние вдоль оси координат Z2 между исходной точкой O1 стыка 1 системы координат и исходной точкой O2 стыка 2 системы координат, а L3 - расстояние вдоль оси координат X3 между исходной точкой O0 стыка 0 системы координат и исходной точкой O3 системы координат бинокулярной камеры.
[0047] После того, как система координат преобразована один раз, решают соответствующую матрицу преобразования, то есть преобразование позы из исходной точки O3 системы координат бинокулярной камеры в исходную точку O0 системы координат стыка 0, тем самым достигая цели размещения облака точек поверхности груды материала и траектории выемки грунта в одной и той же системе координат.
[0048] Таблица параметров DH, показанная в Таблице 1, получена посредством установленной системы координат, а таблица параметров DH показана в Таблице 1.








Таблица 1. Таблица параметров D-H рабочего устройства карьерного электрического экскаватора
[0049] Систему координат с O0 в качестве исходной точки преобразуют дважды в систему координат с O2 в качестве исходной точки и получают матрицу T преобразования позы от седла до вершины зубцов ковша. Следовательно, упреждающая кинематика рабочего устройства карьерного электрического экскаватора составляет
[0050] Полученный выше файл данных облака точек вынутой груды материала в формате txt импортируют в Matlab и представляют в виде трехмерного изображения. Подходящие начальную точку  выемки грунта и конечную точку выемки грунта могут быть выбраны операторами согласно текущей форме вынутой груды материала.
выемки грунта и конечную точку выемки грунта могут быть выбраны операторами согласно текущей форме вынутой груды материала.
[0051] Функцию выбирают в качестве траектории выемки грунта карьерным электрическим экскаватором, логарифмическую спиральную линию  предпочтительно выбирают в настоящем документе, где ρ0 обозначает начальное удлинение рукояти стрелы, а δ обозначает угол резания. ρ0 и δ преобразуют в прямоугольную форму
предпочтительно выбирают в настоящем документе, где ρ0 обозначает начальное удлинение рукояти стрелы, а δ обозначает угол резания. ρ0 и δ преобразуют в прямоугольную форму  а поскольку прямоугольная система координат представляет собой систему координат, в которой ось X ориентирована вертикально вниз, а ось Y ориентирована горизонтально вправо, прямоугольную систему координат необходимо повернуть против часовой стрелки на 90° вокруг оси Z и с помощью преобразования системы координат функция траектории выемки грунта в базовой системе координат получают как
а поскольку прямоугольная система координат представляет собой систему координат, в которой ось X ориентирована вертикально вниз, а ось Y ориентирована горизонтально вправо, прямоугольную систему координат необходимо повернуть против часовой стрелки на 90° вокруг оси Z и с помощью преобразования системы координат функция траектории выемки грунта в базовой системе координат получают как  Для обеспечения плавной траектории выемки грунта без резких изменений скорости, а также плавной остановки выемки грунта во время работ по выемке грунта электрическим экскаватором, необходимо удовлетворить
Для обеспечения плавной траектории выемки грунта без резких изменений скорости, а также плавной остановки выемки грунта во время работ по выемке грунта электрическим экскаватором, необходимо удовлетворить  ,
,
 , где
, где  обозначает угловое смещение, угловую скорость, угловое ускорение, начальный угол выемки грунта, угол окончания и конечное время вершины зубцов ковша соответственно. Согласно условиям, которые необходимо удовлетворить для стабильной выемки грунта карьерным электрическим экскаватором, выбирают полином 5-й степени для интерполяции и подгонки угла вершины зубцов ковша карьерного электрического экскаватора, то есть полярного угла ϕ, для получения функционального отношения полярного угла ϕ, относящегося к t:
обозначает угловое смещение, угловую скорость, угловое ускорение, начальный угол выемки грунта, угол окончания и конечное время вершины зубцов ковша соответственно. Согласно условиям, которые необходимо удовлетворить для стабильной выемки грунта карьерным электрическим экскаватором, выбирают полином 5-й степени для интерполяции и подгонки угла вершины зубцов ковша карьерного электрического экскаватора, то есть полярного угла ϕ, для получения функционального отношения полярного угла ϕ, относящегося к t:

[0052] Согласно полученному выше упреждающему кинематическому решению рабочего устройства карьерного электрического экскаватора и геометрическому отношению, показанному на фиг. 4, выражения ρ и ϕ, относящиеся к px и py, получают и выражают как  Затем выражение отношения между полярным диаметром ρ и полярным углом ϕ, а также удлинением d и углом наклона θ получают и выражают как
Затем выражение отношения между полярным диаметром ρ и полярным углом ϕ, а также удлинением d и углом наклона θ получают и выражают как  Отсюда можно получить функцию
Отсюда можно получить функцию  удлинения d рукояти стрелы, относящуюся к времени t, и функцию
удлинения d рукояти стрелы, относящуюся к времени t, и функцию  угла наклона θ, относящуюся к времени t. Команды передаются на двигатели переменного тока переменной частоты посредством ожидаемой траектории удлинения d рукояти стрелы и ожидаемой траектории угла наклона θ, а исполнительный механизм карьерного электрического экскаватора приводят в действие для осуществления работы по выемке грунта.
угла наклона θ, относящуюся к времени t. Команды передаются на двигатели переменного тока переменной частоты посредством ожидаемой траектории удлинения d рукояти стрелы и ожидаемой траектории угла наклона θ, а исполнительный механизм карьерного электрического экскаватора приводят в действие для осуществления работы по выемке грунта.
[0053] В процессе выемки грунта сопротивление выемке грунта в режиме реального времени можно получить с помощью датчиков усилия, соответственно установленных на соединении между ковшом и концом подъемного каната, а также между толкающим двигателем и синхронным шкивом. Отслеживается, превышает ли верхний предел колебаний показаний датчика усилия заданное пороговое значение, в случае, когда показания датчиков усилия внезапно увеличиваются и превышают заданное пороговое значение, это указывает на то, что вершина зубцов ковша карьерного электрического экскаватора контактирует с крупным блоком угольной породы. После того, как текущая координата  вершины зубцов ковша записана, карьерный электрический экскаватор останавливает работу по выемке грунта и начинает выполнять команды, чтобы обойти крупный блок угольной породы.
вершины зубцов ковша записана, карьерный электрический экскаватор останавливает работу по выемке грунта и начинает выполнять команды, чтобы обойти крупный блок угольной породы.
[0054] Для обеспечения достаточного количества выемки грунта ковшом приспосабливают нисходящий путь, чтобы обойти крупный блок угольной породы. Конкретные операции такие, как изображено на фиг. 5. (1) Сначала вершину зубцов ковша перемещают горизонтально назад на расстояние S. Затем вершину зубцов ковша перемещают вертикально вниз на расстояние H. В конце концов, вершину зубцов ковша перемещают горизонтально вперед на расстояние S до точки  расположенной непосредственно под точкой остановки первой выемки грунта
расположенной непосредственно под точкой остановки первой выемки грунта  Отслеживается, превышают ли показания датчика усилия пороговое значение в данный момент времени, в случае, когда показания превышают пороговое значение, вершину зубцов ковша продолжают перемещать горизонтально назад на расстояние S, затем перемещают вертикально вниз на расстояние H и, в конце концов, перемещают горизонтально вперед на расстояние S до точки,
Отслеживается, превышают ли показания датчика усилия пороговое значение в данный момент времени, в случае, когда показания превышают пороговое значение, вершину зубцов ковша продолжают перемещать горизонтально назад на расстояние S, затем перемещают вертикально вниз на расстояние H и, в конце концов, перемещают горизонтально вперед на расстояние S до точки,  расположенной непосредственно под точкой остановки первой выемки грунта
расположенной непосредственно под точкой остановки первой выемки грунта  и это повторяют последовательно до тех пор, пока показания датчика усилия не превысят пороговое значение. В случае, когда во время второй выемки грунта перед ковшом снова обнаруживают крупную угольную породу после успешного обхода крупной угольной породы, вышеуказанные этапы продолжают выполнять до тех пор, пока показания датчиков усилия не превысят пороговое значение.
и это повторяют последовательно до тех пор, пока показания датчика усилия не превысят пороговое значение. В случае, когда во время второй выемки грунта перед ковшом снова обнаруживают крупную угольную породу после успешного обхода крупной угольной породы, вышеуказанные этапы продолжают выполнять до тех пор, пока показания датчиков усилия не превысят пороговое значение.
[0055] Вот конкретный вариант осуществления, когда в процессе выемки грунта сталкиваются с крупной угольной породой, и команду по обходному пути выполняют один раз. В случае, когда вершина ковша перемещают в точку,  расположенную непосредственно над точкой остановки выемки грунта
расположенную непосредственно над точкой остановки выемки грунта  а показания датчиков усилия отслеживают так, что показания не превышают пороговое значение, это указывает на успешный обход крупного блока угольной породы. Затем конечную точку обходного пути берут в качестве начальной точки, а точки
а показания датчиков усилия отслеживают так, что показания не превышают пороговое значение, это указывает на успешный обход крупного блока угольной породы. Затем конечную точку обходного пути берут в качестве начальной точки, а точки  выбранные на визуальной морфологической карте вынутой груды материала, продолжают использовать в качестве конечной точки. Логарифмическую спираль выбирают в качестве функции траектории добычи полезных ископаемых для второй выемки грунта, два набора координат
выбранные на визуальной морфологической карте вынутой груды материала, продолжают использовать в качестве конечной точки. Логарифмическую спираль выбирают в качестве функции траектории добычи полезных ископаемых для второй выемки грунта, два набора координат  и
и  получают посредством выражения геометрического отношения
получают посредством выражения геометрического отношения  и два набора координат вводят в функцию траектории добычи полезных ископаемых
и два набора координат вводят в функцию траектории добычи полезных ископаемых  для получения
для получения  начальное удлинение ρ0 и угол резания δ второй траектории выемки грунта могут быть получены путем решения. Далее повторяют описанные выше этапы ожидаемой траектории, используя упреждающее кинематическое решение рабочего устройства карьерного электрического экскаватора и геометрическое отношение плоскости, показанное на фиг. 4, получают ожидаемую траекторию удлинения и угла наклона рукояти стрелы, а затем приводят в действие двигатель переменного тока переменной частоты и продолжают выполнять всю работу по выемке грунта.
начальное удлинение ρ0 и угол резания δ второй траектории выемки грунта могут быть получены путем решения. Далее повторяют описанные выше этапы ожидаемой траектории, используя упреждающее кинематическое решение рабочего устройства карьерного электрического экскаватора и геометрическое отношение плоскости, показанное на фиг. 4, получают ожидаемую траекторию удлинения и угла наклона рукояти стрелы, а затем приводят в действие двигатель переменного тока переменной частоты и продолжают выполнять всю работу по выемке грунта.
[0056] Варианты осуществления настоящего изобретения описаны в подробностях выше в сочетании с сопутствующими графическими материалами, в то время как настоящее изобретение не ограничено этим. Различные изменения, которые могут быть внесены в пределах объема знаний специалистов в данной области техники без отступления от цели настоящего изобретения, все попадают в рамки объема защиты формулы изобретения настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ КОВША КАНАТНОГО КАРЬЕРНОГО ЭКСКАВАТОРА И РАБОЧЕЕ ОБОРУДОВАНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485317C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ПРЯМОЙ ИЛИ ОБРАТНОЙ ЛОПАТ ГИДРАВЛИЧЕСКИХ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ | 2003 |
|
RU2236510C1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ С МЕРЗЛОЙ И ПЛОХО РАЗРЫХЛЕННОЙ ПОРОДОЙ, СОДЕРЖАЩЕЙ НЕГАБАРИТНЫЕ КУСКИ | 2022 |
|
RU2812721C1 |
| КОВШ КАРЬЕРНОГО ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2010 |
|
RU2431020C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОБРАТНОЙ ЛОПАТЫ ГИДРАВЛИЧЕСКИХ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ | 2004 |
|
RU2266371C1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР СИСТЕМЫ ИНЖЕНЕРА КУРКОВА | 1991 |
|
RU2005855C1 |
| Рабочее оборудование гидравлического одноковшового экскаватора | 1979 |
|
SU897967A1 |
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ УГОЛЬНЫХ МЕСТОРОЖДЕНИЙ | 1994 |
|
RU2078928C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО КАНАТНОГО ЭКСКАВАТОРА | 2011 |
|
RU2488661C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭКСКАВАЦИЕЙ ГРУНТА И ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436900C2 |
Изобретение относится к области техники электрических экскаваторов, в частности к способу управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения. Способ управления автоматической добычей полезных ископаемых включает установку пространственных систем координат на карьерном электрическом экскаваторе и получение упреждающей кинематики рабочего устройства карьерного электрического экскаватора посредством метода D-H; реализацию трехмерной реконструкции грунта материала посредством бинокулярной камеры и выбор соответствующих начальных и конечных положений первой выемки; выбор функции 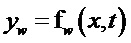 в качестве траектории первой выемки грунта карьерного электрического экскаватора и получение ожидаемой траектории удлинения d рукояти стрелы и ожидаемой траектории угла наклона θ путем использования упреждающей кинематики карьерного электрического экскаватора и отношения геометрии по плоскости, и приведение в действие исполнительного механизма карьерного электрического экскаватора для выполнения работы по выемке грунта; отслеживание в режиме реального времени с помощью датчика усилия, существует ли крупный блок угольной породы в направлении выемки грунта ковша; запись положения текущей вершины зубцов ковша, в случае, когда в ковше отслеживают крупный блок угольной породы, и остановку работы по выемке грунта; приспособление метода планирования нисходящих путей выемки грунта, выбор начальных и конечных положений для второй выемки грунта и функции
в качестве траектории первой выемки грунта карьерного электрического экскаватора и получение ожидаемой траектории удлинения d рукояти стрелы и ожидаемой траектории угла наклона θ путем использования упреждающей кинематики карьерного электрического экскаватора и отношения геометрии по плоскости, и приведение в действие исполнительного механизма карьерного электрического экскаватора для выполнения работы по выемке грунта; отслеживание в режиме реального времени с помощью датчика усилия, существует ли крупный блок угольной породы в направлении выемки грунта ковша; запись положения текущей вершины зубцов ковша, в случае, когда в ковше отслеживают крупный блок угольной породы, и остановку работы по выемке грунта; приспособление метода планирования нисходящих путей выемки грунта, выбор начальных и конечных положений для второй выемки грунта и функции  траектории добычи полезных ископаемых и продолжение выполнения всей работы по выемке грунта. Техническим результатом является достижение автоматической выемки грунта карьерным электрическим экскаватором с автоматическим обходом препятствий, таких как крупные угольные породы. 8 з.п. ф-лы, 5 ил.
траектории добычи полезных ископаемых и продолжение выполнения всей работы по выемке грунта. Техническим результатом является достижение автоматической выемки грунта карьерным электрическим экскаватором с автоматическим обходом препятствий, таких как крупные угольные породы. 8 з.п. ф-лы, 5 ил.
1. Способ управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения, при этом способ включает следующие этапы:
этап S1, калибровка бинокулярной камеры с помощью набора инструментов Matlab, после завершения калибровки установка бинокулярной камеры в центре передней стрелы карьерного электрического экскаватора для извлечения морфологических признаков вынутой груды материала;
этап S2, установка пространственных систем координат на стыке карьерного электрического экскаватора и в центре бинокулярной камеры соответственно, принимая O0, O1, O2, O3 в качестве исходных точек, и получение упреждающей кинематики рабочего устройства карьерного электрического экскаватора посредством метода D-H;
этап S3, выбор соответствующих начальных и конечных положений для первой выемки грунта с помощью трехмерной модели груды материала в Matlab;
этап S4, выбор функции  в качестве траектории первой выемки грунта карьерного электрического экскаватора и получение ожидаемой траектории удлинения d рукояти стрелы и ожидаемой траектории угла наклона θ путем использования упреждающей кинематики карьерного электрического экскаватора и отношения геометрии по плоскости, отправка команд на двигатель переменного тока переменной частоты посредством ожидаемой траектории удлинения d рукояти стрелы и ожидаемой траектории угла наклона θ, и приведение в действие исполнительного механизма карьерного электрического экскаватора для осуществления работы по выемке грунта;
в качестве траектории первой выемки грунта карьерного электрического экскаватора и получение ожидаемой траектории удлинения d рукояти стрелы и ожидаемой траектории угла наклона θ путем использования упреждающей кинематики карьерного электрического экскаватора и отношения геометрии по плоскости, отправка команд на двигатель переменного тока переменной частоты посредством ожидаемой траектории удлинения d рукояти стрелы и ожидаемой траектории угла наклона θ, и приведение в действие исполнительного механизма карьерного электрического экскаватора для осуществления работы по выемке грунта;
этап S5, отслеживание в режиме реального времени с помощью датчика усилия, установленного на части передачи, существования крупного блока угольной породы в направлении выемки грунта ковша в процессе выемки грунта карьерным электрическим экскаватором, запись текущего положения вершины зубцов ковша, в случае, когда в ковше отслеживают крупный блок угольной породы, и прекращение работы по выемке грунта;
этап S6, обход крупного блока угольной породы перед направлением выемки грунта ковша путем приспособления метода планирования нисходящих путей выемки грунта;
этап S7, выбор начальных и конечных положений для второй выемки грунта и функции  траектории добычи полезных ископаемых; и
траектории добычи полезных ископаемых; и
этап S8, получение ожидаемой траектории удлинения d рукояти стрелы и ожидаемой траектории угла наклона θ с использованием упреждающей кинематики карьерного электрического экскаватора и отношения геометрии на плоскости, тем самым продолжая выполнение всей работы по выемке грунта.
2. Способ управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения по п. 1, отличающийся тем, что на этапе S1 для калибровки бинокулярной камеры принимают метод калибровки по шахматной доске, а в качестве калибровочных образцов берут несколько наборов фотографий шахматной доски с разными направлениями и углами.
3. Способ управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения по п. 1, отличающийся тем, что на этапе S1 метод извлечения морфологических признаков вынутой груды материала, в частности, включает следующие этапы:
получение изображений вынутой груды материала, фиксация и получение изображений груды материала, подлежащей выемке, посредством установленной бинокулярной камеры;
корректировка изображений, выполнение корректировки искажений и стерео корректировки полученных изображений груды материала;
извлечение признаков, обнаружение и извлечение точек признаков из изображений левого объектива груды материала и изображений правого объектива груды материала;
выполнение стерео согласования, завершение стерео согласования изображений левого объектива и изображений правого объектива с использованием извлеченных точек признаков и получение карты диспаратности груды материала;
заполнение пустот, обработка недопустимых ошибок, вызванных неравномерным освещением, с использованием метода заполнения средними значениями;
преобразование диспаратности в глубину, преобразование обработанной карты диспаратности в карту глубины посредством геометрического метода; и
выполнение 3D-реконструкции, импорт данных облака точек в Matlab после преобразования карты глубины в данные облака точек посредством преобразования координат и представление в виде стереокарты.
4. Способ управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения по п. 1, отличающийся тем, что на этапе S2 пространственные системы координат устанавливают путем взятия O0, O1, O2, O3 в качестве исходных точек на стыке карьерного электрического экскаватора и в центре бинокулярной камеры соответственно, X0, Y0, X1, Z1, X2, Z2, X3, и Y3 находятся на одной плоскости, Z0, Y1, Y2, и Z3 перпендикулярны плоскости, оси координат X0 и X3 ориентированы горизонтально вправо, оси координат Y0 и Y3 ориентированы вертикально вверх, ось координат X1 параллельна оси координат X2, а направление - вдоль стрелы экскаватора; ось координат Z1 параллельна оси координат Z2, а направление - вдоль стрелы экскаватора.
5. Способ управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения по п. 1, отличающийся тем, что на этапе S4 выбирают траекторию первой выемки грунта карьерного электрического экскаватора в виде логарифмической спирали 
6. Способ управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения по п. 1, отличающийся тем, что на этапе S5 методом отслеживания крупного блока угольной породы является наблюдение за показаниями датчика усилия, в случае, когда верхний предел колебания превышает заданное пороговое значение, определяют, что крупный блок угольной породы существует перед направлением выемки грунта ковша карьерного электрического экскаватора.
7. Способ управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения по п. 1, отличающийся тем, что на этапе S6 метод планирования нисходящих путей выемки грунта включает следующие этапы:
(1) сначала горизонтальное перемещение вершины зубцов ковша назад на расстояние S,
(2) затем вертикальное перемещение вершины зубцов ковша вниз на расстояние H,
(3) в конце концов, горизонтальное перемещение вершины зубцов ковша вперед на расстояние S до точки  расположенной непосредственно под точкой
расположенной непосредственно под точкой  остановки первой выемки грунта, и
остановки первой выемки грунта, и
(4) отслеживание превышения показаний датчика усилия порогового значения в данный момент времени, продолжение перемещения, в случае, когда показания превышают пороговое значение, вершины зубцов ковша горизонтально назад на расстояние S, затем вертикальное перемещение вершины зубцов ковша вниз на расстояние H и, в конце концов, горизонтальное перемещение вершины зубцов ковша вперед на расстояние S до точки расположенной непосредственно под точкой остановки первой выемки грунта, и последовательное повторение до тех пор, пока показания датчика усилия не превысят пороговое значение.
8. Способ управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения по п. 1, отличающийся тем, что на этапе S7 начальные и конечные положения для второй выемки грунта представляют собой конечную точку обходного пути и выбранную конечную точку первой выемки грунта соответственно.
9. Способ управления автоматической добычей полезных ископаемых карьерным электрическим экскаватором на основе вспомогательного зрения по п. 1, отличающийся тем, что на этапе S7 выбирают траекторию второй выемки грунта карьерного электрического экскаватора в виде логарифмической спирали
| CN 115030250 A, 09.09.2022 | |||
| 3D КОНТРОЛЛЕР ОБЪЕМНОЙ СКОРОСТИ ЗАБОРЩИКА | 2013 |
|
RU2630020C2 |
| CN 113605483 A, 05.11.2021 | |||
| CN 115354708 A, 18.11.2022 | |||
| JP 3184311 U, 20.06.2013 | |||
| US 2021148085 A1, 20.05.2021. | |||

