Изобретение относится к машиностроению, а именно к зубчатым планетарным передачам, в которых центральный венец с внутренним зубчатым зацеплением неподвижен, а крутящий момент передается от солнечной шестерни к водило.
Известна кинематическая схема одноступенчатого планетарного механизма под названием «Планетарный механизм Джеймса», в которой имеется неподвижное колесо, центральная ведущая шестерня, один сателлит и водило [1, стр. 156, рис. 7.23]. Работоспособность данного типа конструкции определяется по формуле подвижности плоских механизмов выведенная П.Л. Чебышева [1, стр. 40, формула (2.6)]:
где n - число подвижных звеньев (все элементы механизма кроме жестко зафиксированного колеса);
p5 - число кинематических пар пятого класса;
р4 - число кинематических пар четвертого класса.
В рассматриваемом односателлитном планетарном механизме подвижность по данной формуле (1) равна 1. Это означает что механизм работоспособен и в нем отсутствуют избыточные связи.
Несмотря на то, что подвижность и работоспособность такого механизма подтверждается формулой (1), на практике у него возникает дисбаланс сил, что приводит к нестабильной работе всего редуктора и возникновению дополнительных нагрузок на другие элементы планетарного механизма.
Для решения данной проблемы добавляют один и более сателлитов, которые способны будут уравновесить всю конструкцию. Однако добавляя в конструкцию [1, стр. 156, рис. 7.23] более одного сателлита, например, как стандартный трехсателлитный планетарный механизм [1, стр. 498, рис. 22.3.б)], решается проблема равновесия конструкции, но возникает проблема подвижности механизма, так как по формуле П.Л. Чебышева, данная конструкция будет иметь подвижность равную W = -1. При подвижности равной -1, планетарный механизм является неработоспособным. Подобные механизмы имеют избыточные связи, т.е. связи которые создают дополнительную жесткость механизма, не позволяя самоустанавливаться. Наличие избыточных связей приводит к тому, что механизм вынужденно работает с дополнительными сопротивлениями и усилиями, в следствии чего уменьшается КПД и происходит преждевременный износ всех элементов.
С целью обеспечения определенного движения всех звеньев планетарного зубчатого механизма, при увеличении сателлитов появляется необходимость в кинематическую цепь этого механизма, вводить дополнительные рычаги в количестве, равном числу дополнительных сателлитов, т.е. число сателлитов равно числу дополнительных рычагов, устанавливаемых на водило.
Наиболее подходящим к заявленному планетарному механизму по техническому исполнению является самоустанавливающийся планетарный механизм [2]. В данном планетарном механизме, для исключения избыточных связей и обеспечения свободного безызносного вращения, установлено два из трех сателлитов трехсателлитного планетарного механизма относительно водила через дополнительные шатуны. Недостатком такого механизма является динамическая неуравновешенность основного элемента водила, физическая неисполнимость такой конструкции, а также, в данной конструкции сателлиты, установленные на шатуны, являются пассивными, что указывает на то, что основная нагрузка по-прежнему передается через один сателлит, установленный на неподвижном элементе водило.
Задачей изобретения является создание уравновешенного безызбыточного самоустанавливающегося планетарного механизма путем добавления дополнительных элементов позволяющих обеспечить исключение избыточных связей. Исключение избыточных связей способствует самоустановлению механизма, а выполнение всех элементов механизма в симметричном исполнении обеспечивает уравновешенность. Все вышеперечисленное приводит к решению вопроса о зубчатом зацеплении и равномерности распределения нагрузки между сателлитами, т.е. исключаются зазоры между зубьями, нагрузка распределяется по всем трем сателлитам одновременно. Применение уравновешенного безызбыточного самоустанавливающегося планетарного механизма обеспечит увеличение срока службы и создаст возможность при необходимости уменьшить масса-габаритные параметры.
Решение поставленной задачи достигается установкой двух тяг-качалок, обеспечивающих беспрепятственную работу сателлитов, и передачу нагрузки от сателлитов к основному водило и на ведомый вал.
Сущность изобретения заключается в том, что создается уравновешенный безызбыточный самоустанавливающийся планетарный механизм, включающий в себя неподвижный зубчатый венец с внутренним зацеплением, центральную солнечную шестерню имеющую внешнее зацепление, водило, три сателлита, один из которых соединен с водило через шарнир, а два других имеют соединение с водило посредством дополнительных тяг-качалок. Конструкция водила выполнена в форме трех лопастей, на одной из которой элемент тяги-качалки соединен с водило, лопасти водила имеют между собой равнозначный угол в 120°, сателлиты расположены под равнозначными углами в 120°, угол от лопастей водила до сателлитов составляет 60°, межосевое расстояние тяг-качалок и конструкции водила равно межосевому расстоянию сателлитов. Все указанные условия необходимы для обеспечения уравновешенности планетарного механизма и задания дополнительной подвижности сателлитам, для исключения избыточных связей.
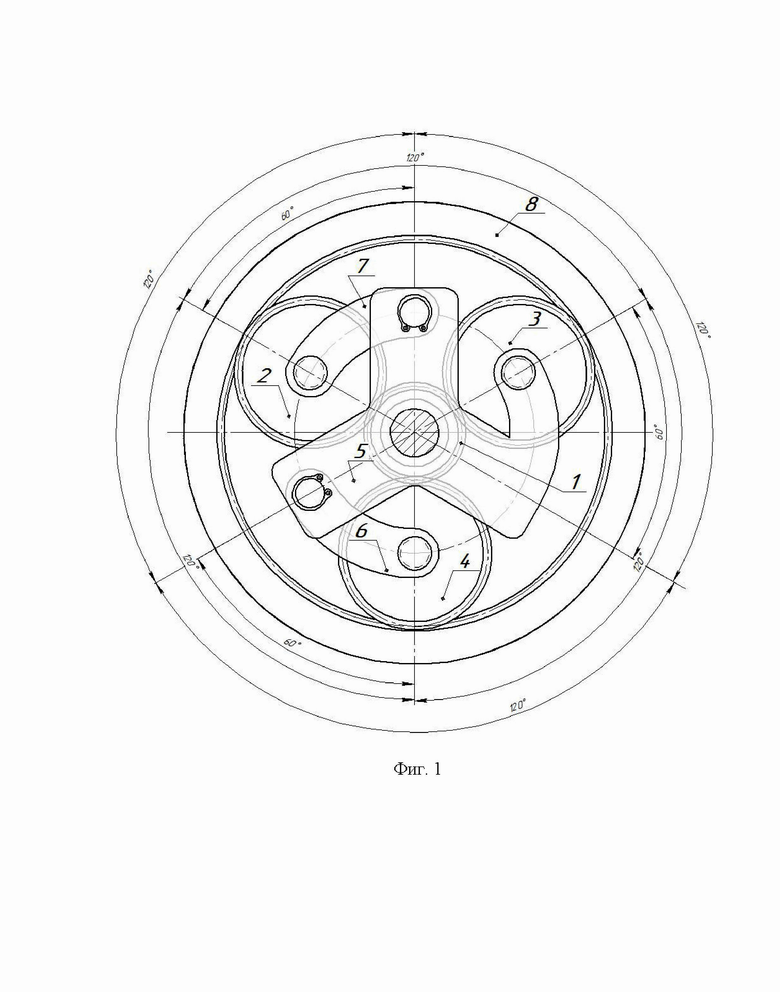
Предлагаемый способ иллюстрируется на чертеже, на котором представлен предлагаемый уравновешенный безызбыточный самоустанавливающийся планетарный механизм (фиг. 1).
Механизм имеет в своем составе подвижную солнечную шестерню с внешним зацеплением (1) от которой передается крутящий момент с ведущего вала на три сателлита (2, 3, 4), из которых один сателлит (2) соединен с центральной частью водила выполненной в форме лопастей, имеющих угол под 120° (5), при помощи неподвижной оси крепления, а два других сателлита (3, 4) установлены на подвижном элементе водило, тяга-качалка (6) и тяга-качалка (7), расположенных равноудаленно на угол 60° от осей лопастей водила, вся конструкция работает внутри неподвижного центрального колеса с внутренним зацеплением - зубчатый венец (8). Все три сателлита установлены таким образом, что являются активными в работе планетарного редуктора, поскольку вращение передается от солнечной шестерни сразу трем сателлитам, исключая зазоры в зубчатом зацеплении при помощи подвижности тяги-качалки. Благодаря такому соединению сателлиты (3, 4) имеют возможность самоустанавливаться по отношению центральных зубчатых колес, солнечного и внешнего венца с внутренним зацеплением, а сателлит (2) можно рассматривать как элемент обычной передачи Джеймса [1, стр. 156, рис. 7.23], который уже является одноподвижным механизмом, способным самоустанавливаться.
Работа механизма осуществляется следующим образом, внутри центрального неподвижного венца с внутренним зубчатым зацеплением (8) от ведущего вала передается крутящий момент на солнечную шестерню (1), от движения солнечной шестерни (1), происходит выбор зазора между зубьями на всех сателлитах (2, 3, 4) и центральной шестерней, поскольку каждый сателлит имеет возможность самоустанавливаться, после чего, вращающийся момент от солнечной шестерни передается всем трем сателлитам одновременно. Сателлиты (2, 3, 4) отталкиваются от неподвижного венца с внутренним зубчатым зацеплением, и приводят в движение водило выполненное в форме лопастей, сателлит (1) самостоятельно передает момент, а сателлиты (2, 3) при помощи конструктивных элементов тяг-качалок (6, 7), которые и позволяют сателлитам самоприспосабливаться во время начала передачи момента вращения. Ключевой особенностью данного механизма является то, что все три сателлита активные, т.е. равнозначно воспринимают нагрузку, а расположение элементов конструкций под равными углами, между сателлитами 120°, между лопастями водило 120°, отклонение от оси лопастей до сателлитов составляет 60°, а межосевое расстояние водило в форме лопастей и тяг-качалок равно межосевому расстоянию сателлитов, позволяет создать конструкцию уравновешенной, что позволит передавать нагрузки без перекоса и сопротивлений в любом сателлите.
По формуле П.Л. Чебышева [1, стр. 40, формула (2.6)], подвижность такого механизма будет равна:
где n = 7: колеса 1,2,3,4, водило 5, тяги-качалки 6, 7;
p5 = 7: связь солнечного колеса 1 с опорой входящего вала, водило 5 с опорой выходящего вала, оси колес 2,3,4 с водилом 5 и тягам-качалками 6,7, связь тяг-качалок 6,7 с водилом 5;
р4 = 6: зубчатое зацепление сателлитов 2,3,4 с солнечным колесом 1 и венцом с внутренним зацеплением 8.
Согласно расчету, подвижность такого механизма равна единице, что свидетельствует о его работоспособности. Работоспособность механизма обусловлена исключением избыточных связей при помощи подвижности сателлитов.
Таким образом, предлагаемый механизм самоустанавливающийся (самоприспосабливаемый), а расположение всех элементов под равнозначными углами позволяет конструкции быть уравновешенной.
Источники информации
1. Артоболевский И.И. Теория механизмов и машин. Издательство 4-е. Москва, «Наука», 1988г., - 639 с.
2. Пат. 2342573 РФ, МПК F16H 1/48. Самоустанавливающийся планетарный механизм / Дворников Л.Т.; заявитель и патентообладатель Новокузнецк. СибГИУ. - № 2007126434/11; заявл. 11.07.2007; опубл. 27.12.2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИССЛЕДОВАНИЯ КОНТАКТА ЗАЦЕПЛЕНИЯ ЗУБЧАТЫХ КОЛЕС В МНОГОСАТЕЛЛИТНОЙ ПЛАНЕТАРНОЙ ПЕРЕДАЧЕ | 2023 |
|
RU2812658C1 |
| ДВУХСТУПЕНЧАТАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2008 |
|
RU2402707C2 |
| ПРИВОД СТАНКОВ-КАЧАЛОК | 2014 |
|
RU2557813C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ ПРЕОБРАЗУЮЩИЙ МЕХАНИЗМ ПРИВОДА СТАНКА-КАЧАЛКИ | 2005 |
|
RU2303182C2 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2342573C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2010 |
|
RU2419006C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ | 1993 |
|
RU2111396C1 |
| Поршневая машина | 1977 |
|
SU1070322A1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ПРИВОДА ВЕДУЩИХ ОСЕЙ И КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2125673C1 |
| РАЗДАТОЧНАЯ КОРОБКА ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2236958C2 |
Изобретение относится к машиностроению. Уравновешенный самоустанавливающийся планетарный механизм включает в себя неподвижное центральное колесо с внутренним зацеплением - зубчатый венец и ведущую центральную солнечную шестерню, имеющую внешнее зацепление, сопряженную с тремя активными сателлитами. Один из сателлитов соединен с водилом через шарнир, а два других имеют соединение с водилом посредством дополнительных тяг-качалок. Конструкция водила выполнена в форме трех лопастей, которые имеют между собой равнозначный угол в 120°. Сателлиты расположены под равнозначными углами в 120°. Угол от лопастей водила до сателлитов составляет 60°. Межосевое расстояние тяг-качалок и конструкции водила равно межосевому расстоянию сателлитов. Обеспечивается равномерное распределение нагрузок по сателлитам при работе механизма. 1 ил.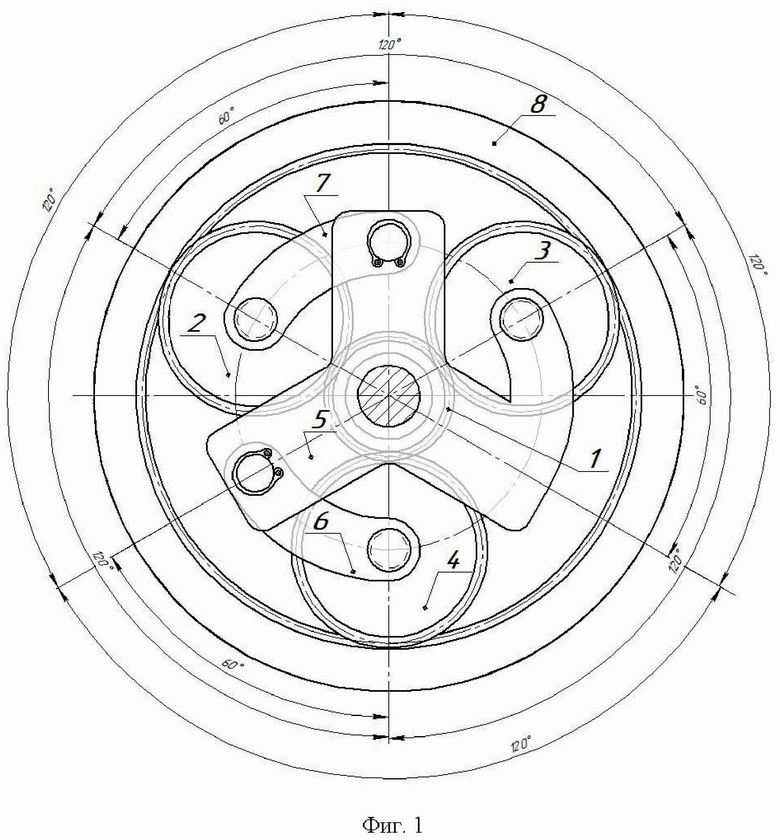
Уравновешенный самоустанавливающийся планетарный механизм, включающий в себя неподвижное центральное колесо с внутренним зацеплением – зубчатый венец, ведущую центральную солнечную шестерню, имеющую внешнее зацепление, сопряженную с тремя активными сателлитами, отличающийся тем, что один из сателлитов соединен с водилом через шарнир, а два других имеют соединение с водилом посредством дополнительных тяг-качалок, при этом конструкция водила выполнена в форме трех лопастей, которые имеют между собой равнозначный угол в 120°, сателлиты расположены под равнозначными углами в 120°, угол от лопастей водила до сателлитов составляет 60°, межосевое расстояние тяг-качалок и конструкции водила равно межосевому расстоянию сателлитов.
| СПОСОБ ПОЛУЧЕНИЯ ДИХЛОРАНГИДРИДА 2-ХЛОРЭТИЛФОСФИНОВОЙ КИСЛОТЫ | 0 |
|
SU212257A1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2342573C1 |
| US 3315547 A1, 25.04.1967 | |||
| US 3080775 A1, 12.03.1963. | |||

