Изобретение относится к электротехнике и может быть использовано при учете момента нагрузки асинхронного электродвигателя.
Известен способ определения крутящего момента (Попов, А. П. Микропроцессорная система бесконтактного контроля и измерения крутящего момента / А. П. Попов, М. Р. Винокуров, А. А. Моисеенко // Вестник Донского государственного технического университета. – 2010. – Т. 10. – № 2(45). – С. 243-248.) Сущность способа: Два соосных вала нагрузки и рабочего механизма соединяют через упругий элемент. На концах упругого элемента устанавливают ферромагнитные зубцы. При отсутствии крутящего момента угловое смещение между первым и вторым зубцами равно нулю. На плоском жестком основании, параллельном осевой линии двигателя и рабочего механизма, установлены два индукционных датчика. При вращении валов в момент прохождения любого из зубцов через магнитное поле соответствующего датчика последний вырабатывает двухполярный импульс напряжения. Если крутящий момент не равен нулю, упругий элемент скручивается, а один из зубцов начинает отставать от другого на определенный угол. Интервал времени между импульсами первого и второго индукционных датчиков будет прямо пропорционален углу скручивания упругого элемента (т.е. крутящему моменту) и обратно пропорционален угловой скорости вращения зубцов.
Наиболее близким к заявляемому является способ определения момента нагрузки асинхронного электродвигателя (Патент RU 2784324 Российская Федерация, МПК G01R 31/34 (2006.01), H02P 21/14 (2006.01), G01L 3/22 (2006.01). Способ определения момента нагрузки асинхронного электродвигателя : № 2022120819 : заявл. 29.07.2022 : опубл. 23.11.2022 / О. А. Лысенко. – 6 с. : ил.). Сущность способа: проводят измерение мгновенных величин токов и напряжений статора асинхронного двигателя, преобразование трехфазных значений токов и напряжений в двухфазные составляющие токов и напряжений, отличающийся тем, что на каждом из временных отрезков составляют матрицу коэффициентов уравнений состояния асинхронного двигателя, определяют матрицу ковариаций ошибки, определяют матричный коэффициент усиления фильтра Калмана, определяют вектор выходных величин, по составляющим которого вычисляют электромагнитный момент и угловую скорость вращения ротора, развиваемые асинхронным электродвигателем, по значениям электромагнитного момента и угловой скорости вращения ротора определяют промежуточные значения момента нагрузки, фильтруют данные, тем самым определяя мгновенную величину момента нагрузки асинхронного двигателя.
Недостатками известных способов является недостаточная точность определения момента сопротивления в установившихся и переходных процессах в условиях шумов входных сигналов.
Задачей изобретения является повышение момента сопротивления асинхронного электродвигателя.
Отличием от известных способов является использование адаптивного наблюдателя использующего нечеткий регулятор, позволяющего снизить погрешность определения момента сопротивления нагрузки асинхронного электродвигателя.
Сущность технического решения поясняется формулами (1-20).
Технический результат достигается тем, что измеряют мгновенные величины токов ( ,
, ,
, ) и напряжений (
) и напряжений ( ,
, ,
, ) статора асинхронного двигателя, вычисляют двухфазные составляющие тока статора (
) статора асинхронного двигателя, вычисляют двухфазные составляющие тока статора ( ,
, ) и напряжения (
) и напряжения ( ,
, ):
):
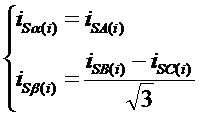 (1),
(1),
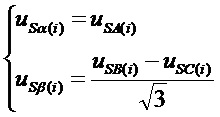 (2).
(2).
Определяют оценки составляющих тока статора  ,
, :
:
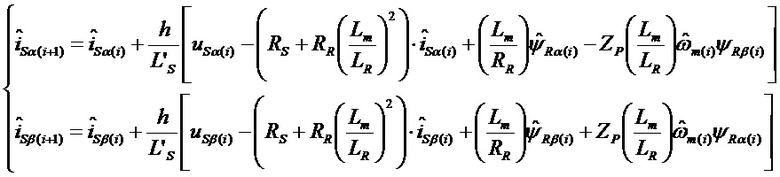 (3),
(3),
где  – шаг итерации;
– шаг итерации;
 – индуктивность рассеивания статора, Гн;
– индуктивность рассеивания статора, Гн;
 – индуктивность ветви намагничивания, Гн;
– индуктивность ветви намагничивания, Гн;
 – индуктивность ротора, Гн;
– индуктивность ротора, Гн;
 ,
,  – сопротивление статора и ротора, Ом;
– сопротивление статора и ротора, Ом;
 – число пар полюсов асинхронного двигателя.
– число пар полюсов асинхронного двигателя.
Определяют оценки составляющих потокосцепления ротора  ,
,  :
:
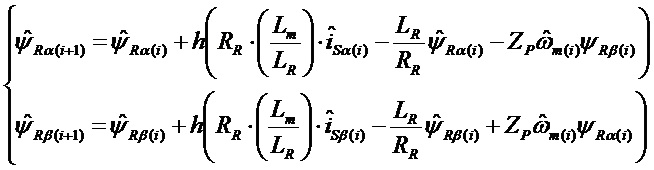 (4).
(4).
Определяют функцию невязки:
 (5).
(5).
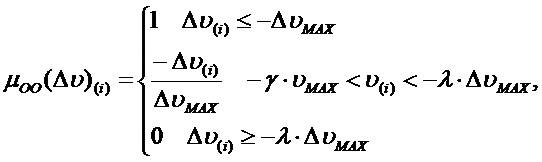
Определяют приращение функции невязки:
 (6).
(6).
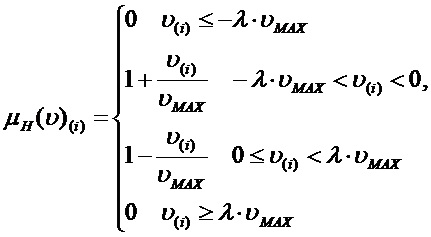
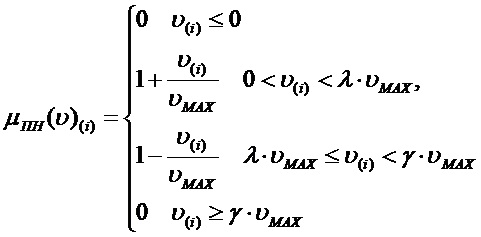
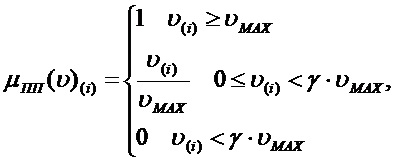
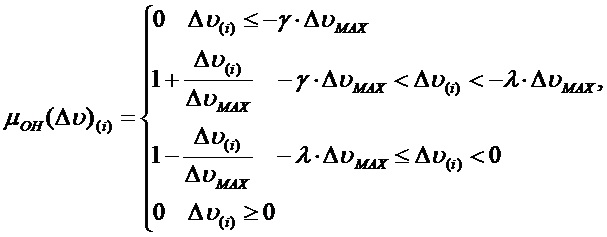
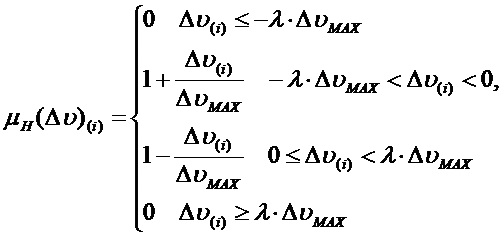
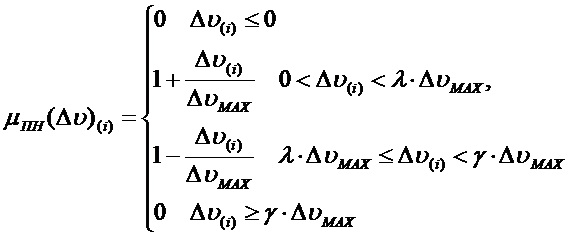
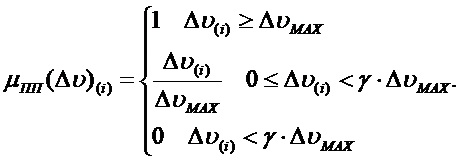
На этапе фаззификации определяется принадлежность функции невязки  и приращения функции невязки пяти лингвистическим переменным: ОО (отрицательно), ОН (отрицательно-нейтрально), Н (нейтрально), ПН (положительно-нейтрально), ПП (положительно), согласно следующим соотношениям:
и приращения функции невязки пяти лингвистическим переменным: ОО (отрицательно), ОН (отрицательно-нейтрально), Н (нейтрально), ПН (положительно-нейтрально), ПП (положительно), согласно следующим соотношениям:
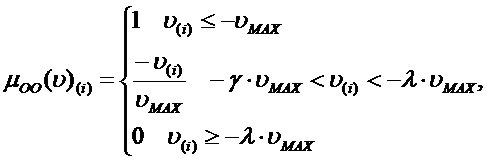 (7)
(7)
где  – верхняя граница значений функций невязки,
– верхняя граница значений функций невязки,
 ,
,  – доли деления интервала верхних и нижних границ,
– доли деления интервала верхних и нижних границ,  .
.
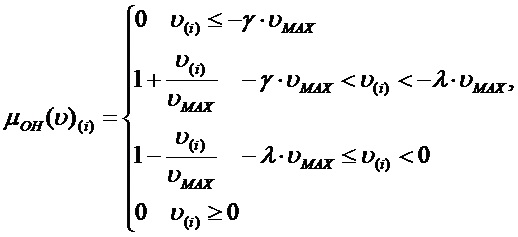 (8)
(8)
 (9)
(9)
 (10)
(10)
 (11)
(11)
 (12)
(12)
где  – верхняя граница значений функций приращений невязки.
– верхняя граница значений функций приращений невязки.
 (13)
(13)
 (14)
(14)
 (15)
(15)
 (16)
(16)
Согласно набору правил (Табл 1.) определяются функции нечетких значений: М (малое), СМ (средне-малое), С (среднее), СБ (средне-большое), Б (большое).
Таблица 1. Набор правил нечеткого логического множества


Правила нечеткого логического множества (Таблица 1) интерпретируются, используя технику нечеткой импликации Мамдани. Для этого определяют уровни «отсечения» для каждого из правил:
 , (17)
, (17)
где  – функция принадлежности k-й входной переменной (x) для j-го правила,
– функция принадлежности k-й входной переменной (x) для j-го правила,
 – функция принадлежности выходной переменной.
– функция принадлежности выходной переменной.
Затем определяют результирующую функцию принадлежности:
 . (18)
. (18)
На этапе дефаззификации определяются выходные значения (коэффициенты усиления пропорциональной, интегральной и дифференциальной составляющих )  (nmax=3) по методу центра тяжести:
(nmax=3) по методу центра тяжести:
 , (19)
, (19)
Оцененное значение скорости определяется по следующей формуле:
 (20).
(20).
Определяют электромагнитный момент асинхронного двигателя  по формуле (21):
по формуле (21):
 (21)
(21)
На интервале усреднения  , определяют момент нагрузки асинхронного двигателя (22):
, определяют момент нагрузки асинхронного двигателя (22):
 , (22)
, (22)
где  – совместный момент инерции нагрузки и асинхронного двигателя, кг·м2.
– совместный момент инерции нагрузки и асинхронного двигателя, кг·м2.
В численных экспериментах на асинхронном двигателе АД80М2 динамическая погрешность определения момента нагрузки асинхронного двигателя по сравнению с эталонной моделью в установившемся режиме не превышает 0,5%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения расхода жидкости центробежного насоса с асинхронным электроприводом | 2024 |
|
RU2835473C1 |
| Способ определения давления центробежного насоса с асинхронным электроприводом | 2024 |
|
RU2835472C1 |
| Способ определения угловой скорости вращения ротора асинхронного электродвигателя | 2024 |
|
RU2839821C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СУДОВОЙ СИСТЕМОЙ ЭЛЕКТРОДВИЖЕНИЯ НА ОСНОВЕ НЕЧЕТКОГО РЕГУЛЯТОРА | 2010 |
|
RU2450299C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСХОДА ЖИДКОСТИ ЦЕНТРОБЕЖНОГО НАСОСА С АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2015 |
|
RU2610909C1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ДАВЛЕНИЯ НАСОСА С ЭЛЕКТРОДВИГАТЕЛЕМ | 2016 |
|
RU2623195C1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ СЕТИ ПЕРЕДАЧИ ДАННЫХ | 2015 |
|
RU2610287C1 |
| Способ определения момента нагрузки асинхронного электродвигателя | 2022 |
|
RU2784324C1 |
Изобретение относится к электротехнике и может быть использовано при учете момента нагрузки асинхронного электродвигателя. Измеряют мгновенные величины токов и напряжений статора асинхронного двигателя, преобразуют трехфазные значения токов и напряжений в двухфазные составляющие токов и напряжений. На каждом из временных отрезков определяют оценки составляющих тока статора, вычисляют оценки составляющих потокосцепления ротора. По оцененным значениям тока статора и потокосцепления ротора определяют функцию невязки и ее приращение. На основании значений функции невязки и ее приращения определяют принадлежность функции невязки и приращения функции невязки пяти лингвистическим переменным, применяя аппарат нечеткой логики. Используя технику нечеткой импликации Мамдани интерпретируют согласно набору правил логические переменные. На этапе дефаззификации определяются коэффициенты усиления пропорциональной, интегральной и дифференциальной составляющих по методу центра тяжести. С помощью полученных коэффициентов, функции невязки и приращения функции невязки определяют угловую скорость вращения ротора асинхронного двигателя. Полученное значение угловой скорости используют для определения оценок тока статора, потокосцепления ротора и функции невязки на следующем шаге. По значениям электромагнитного момента и угловой скорости вращения ротора определяют значение момента нагрузки асинхронного двигателя. Техническим результатом при реализации заявленного решения является повышение точности определения измерения момента нагрузки.
Способ определения момента нагрузки асинхронного двигателя, заключающийся в том, что проводят измерение мгновенных величин токов и напряжений статора асинхронного двигателя, преобразование трехфазных значений токов и напряжений в двухфазные составляющие токов и напряжений, отличающийся тем, что на каждом из временных отрезков определяют оценки составляющих тока статора, вычисляют оценки составляющих потокосцепления ротора, по оцененным значениям тока статора и потокосцепления ротора определяют функцию невязки и ее приращение, на основании значений функции невязки и ее приращения определяют принадлежность функции невязки и приращения функции невязки пяти лингвистическим переменным, применяя аппарат нечеткой логики, используя технику нечеткой импликации Мамдани интерпретируют согласно набору правил логические переменные, на этапе дефаззификации определяются коэффициенты усиления пропорциональной, интегральной и дифференциальной составляющих по методу центра тяжести, с помощью полученных коэффициентов, функции невязки и приращения функции невязки определяют угловую скорость вращения ротора асинхронного двигателя, полученное значение угловой скорости используют для определения оценок тока статора, потокосцепления ротора и функции невязки на следующем шаге, по значениям тока статора и оцененных значений потокосцепления определяют электромагнитный момент асинхронного двигателя, по значениям электромагнитного момента и угловой скорости ротора определяют мгновенную величину момента нагрузки асинхронного двигателя.
| Способ определения момента нагрузки асинхронного электродвигателя | 2022 |
|
RU2784324C1 |
| ТЕРМОСТАТИЧЕСКИЙ НАСОС | 2010 |
|
RU2418993C1 |
| CN 106982017 A, 25.07.2017 | |||
| CN 102914740 B, 16.12.2015. | |||

