Изобретение относится к электротехнике и может быть использовано при учете момента нагрузки асинхронного электродвигателя.
Известен способ определения крутящего момента (Попов, А. П. Микропроцессорная система бесконтактного контроля и измерения крутящего момента / А. П. Попов, М. Р. Винокуров, А. А. Моисеенко // Вестник Донского государственного технического университета. – 2010. – Т. 10. – № 2(45). – С. 243-248.) Сущность способа: Два соосных вала нагрузки и рабочего механизма соединяют через упругий элемент. На концах упругого элемента устанавливают ферромагнитные зубцы. При отсутствии крутящего момента угловое смещение между первым и вторым зубцами равно нулю. На плоском жестком основании, параллельном осевой линии двигателя и рабочего механизма, установлены два индукционных датчика. При вращении валов в момент прохождения любого из зубцов через магнитное поле соответствующего датчика последний вырабатывает двухполярный импульс напряжения. Если крутящий момент не равен нулю, упругий элемент скручивается, а один из зубцов начинает отставать от другого на определенный угол. Интервал времени между импульсами первого и второго индукционных датчиков будет прямо пропорционален углу скручивания упругого элемента (т.е. крутящему моменту) и обратно пропорционален угловой скорости вращения зубцов.
Наиболее близким к заявляемому является способ определения момента нагрузки асинхронного электродвигателя (Афанасьев К.С., Глазырин А.С. Наблюдатель полного вектора состояния и момента нагрузки асинхронного электродвигателя //Электротехнические комплексы и системы управления. –2013. – № 4. – С. 24–30.). Сущность способа: измеряют проекции вектора тока и напряжения статора, определяют оцененные составляющие тока статора, вычисляют разницу между оцененными значениями составляющих тока статора и текущими значениями составляющих стока статора, определяют оцененные значения составляющих потокосцеплений ротора, по оцененным значениям составляющих тока статора и потокосцепления ротора определяют электромагнитный момент асинхронного двигателя, с помощью оцененных значений составляющих потокосцепления ротора и разниц между оцененными значениями составляющих тока статора и текущими значениями составляющих тока статора, определяют момент нагрузки.
Недостатками известных способов является недостаточная точность определения момента сопротивления в установившихся и переходных процессах в условиях шумов входных сигналов.
Задачей изобретения является повышение точности момента нагрузки асинхронного электродвигателя.
Отличием от известных способов является использование фильтра Калмана, позволяющего снизить погрешность определения момента сопротивления нагрузки асинхронного электродвигателя.
Сущность технического решения поясняется формулами (1-8).
Технический результат достигается тем, что измеряют мгновенные величины токов (









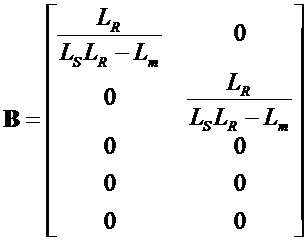
Для определения переменных состояния асинхронного двигателя используют Фильтр Калмана (Бреммер К., Зиферлинг Г. Фильтр Калмана–Бьюси. – М.: Наука, 1982. – 199 с.). Входными воздействиями для фильтра Калмана на i-м шаге являются:


Выходными значениями фильтра Калмана является вектор 
Где 


Определяют 

где 

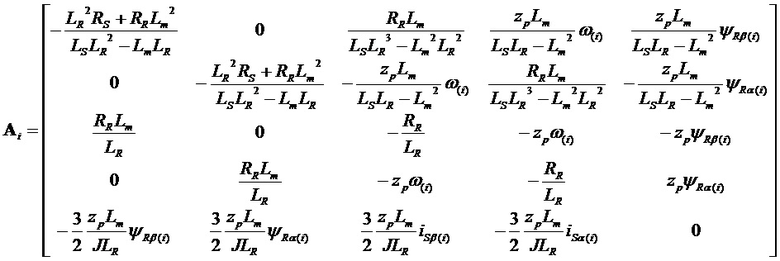







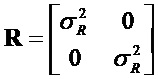
Коэффициенты матрицы 
где 






Определяют матричный коэффициент усиления фильтра Калмана на i-м шаге (4):



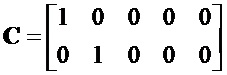
Определяют вектор выходных величин 


Определяют угловую скорость вращения ротора двигателя 
Определяют электромагнитный момент асинхронного двигателя 

На интервале усреднения 

Где 
Фильтруют данные, определяют мгновенную величину момент нагрузки асинхронного двигателя, по формуле (8):
В численных экспериментах на асинхронном двигателе АД80М2 статическая погрешность определения момента нагрузки по сравнению с эталонной моделью в установившемся режиме не превышает 1%.
Асинхронный электропривод для измерения момента сопротивления, создаваемого нагрузкой двигателя. Измеряют мгновенные величины токов и напряжений статора асинхронного двигателя, преобразуют трехфазные значения токов и напряжений в двухфазные составляющие токов и напряжений. На каждом из временных отрезков составляют матрицу коэффициентов уравнений состояния асинхронного двигателя, определяют матрицу ковариаций ошибки, определяют матричный коэффициент усиления фильтра Калмана, определяют вектор выходных величин, по составляющим которого вычисляют электромагнитный момент и угловую скорость вращения ротора, развиваемые асинхронным электродвигателем. По значениям электромагнитного момента и угловой скорости вращения ротора определяют промежуточные значения момента нагрузки, фильтруют данные, тем самым определяя мгновенную величину момента нагрузки асинхронного двигателя. Техническим результатом при реализации заявленного решения является повышение точности определения измерения момента нагрузки.
Способ определения момента нагрузки асинхронного двигателя, заключающийся в том, что проводят измерение мгновенных величин токов и напряжений статора асинхронного двигателя, преобразование трехфазных значений токов и напряжений в двухфазные составляющие токов и напряжений, отличающийся тем, что на каждом из временных отрезков составляют матрицу коэффициентов уравнений состояния асинхронного двигателя, определяют матрицу ковариаций ошибки, определяют матричный коэффициент усиления фильтра Калмана, определяют вектор выходных величин, по составляющим которого вычисляют электромагнитный момент и угловую скорость вращения ротора, развиваемые асинхронным электродвигателем, по значениям электромагнитного момента и угловой скорости вращения ротора определяют промежуточные значения момента нагрузки, фильтруют данные, тем самым определяя мгновенную величину момента нагрузки асинхронного двигателя.
| СПОСОБ КОНТРОЛЯ МЕТРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК СИСТЕМ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОВ ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2542605C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
| Статья: "НАБЛЮДАТЕЛЬ МОМЕНТА НАГРУЗКИ АСИНХРОННОГО ДВИГАТЕЛЯ С ДВОЙНОЙ БЕЛИЧЬЕЙ КЛЕТКОЙ РОТОРА",Ж | |||
| Омский научный вестник, 2016 | |||
| Наблюдатель полного вектора состояния и момента нагрузки асинхронного электродвигателя //Электротехнические комплексы и системы управления | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| - С | |||

