Изобретение относится к авиационной технике, а именно к конструкции безредукторного привода соосной системы валов винтокрылого летательного аппарата, и может быть использовано в составе беспилотного транспортного летательного аппарата с электрическими силовыми установками, используемого, в частности, в условиях городских агломераций.
Валы несущих винтов винтокрылых аппаратов являются наиболее нагруженными и ответственными деталями трансмиссии и работают в условиях сочетания различных видов нагрузок: постоянных и переменных составляющих осевой силы и крутящих моментов, переменных перерезывающих сил от аэродинамических нагрузок. Необходимым условием является исключение возможности передачи возникающих в процессе эксплуатации привода нагрузок на роторные и корпусные детали электрических силовых установок.
Известен привод соосной системы валов винтокрылого летательного аппарата, содержащий корпус, предназначенный для размещения подшипниковых узлов, с установленной в нем системой концентрично расположенных внешнего и внутреннего валов соответственно нижнего и верхнего несущих винтов противоположного направления вращения кинематически связанных с двигателем для приведения во вращение каждого из валов вокруг общей оси вращения (RU 2541569, 2015 г.).
Известен привод соосной системы валов винтокрылого летательного аппарата, содержащий корпус, предназначенный для размещения подшипниковых узлов, с установленной в нем системой валов соответственно нижнего и верхнего несущих винтов противоположного направления вращения, связанных с электрическим двигателем для приведения во вращение каждого из валов вокруг общей оси вращения (Entwicklung performanter Antriebeseinyeiten fur eVTOL, 2021).
В известных технических решениях, указанных выше, кинематическая связь двигателя с валами несущих винтов осуществляется при помощи соответствующих редукторов, что является существенным недостатком, поскольку использование последних приводит к увеличению габаритных размеров приводов.
Наиболее близким по технической сущности и назначению является безредукторный привод соосной системы валов винтокрылого летательного аппарата, содержащий корпус, предназначенный для размещения подшипниковых узлов, с установленной в нем системой концентрично расположенных внешнего и внутреннего валов соответственно нижнего и верхнего несущих винтов противоположного направления вращения с отдельными электрическими двигателями для приведения во вращение каждого из валов вокруг общей оси вращения (RU 2648502, 2016 г.).
В известном техническом решении электрические двигатели расположены последовательно, между ними установлены устройства управления шагом винтов, предназначенные для управления положением последних при различных режимах полета. Кроме того, в известном техническом решении не рассматривается система охлаждения электрических двигателей, оказывающая влияние на продолжительность эксплуатации привода во время полета.
Таким образом, существенным недостатком известного технического решения является сложность конструкции, приводящая к увеличению продольных габаритных размеров, а также отсутствие эффективного охлаждения привода.
Техническая проблема, на решение которой направлено изобретение, заключается в габаритных размерах привода, а также в обеспечении охлаждения последнего.
Технический результат, достигаемый при реализации настоящего изобретения, заключается в уменьшении продольных габаритных размеров при одновременном формировании направленного потока воздуха для охлаждения привода.
Заявленный технический результат достигается за счет того, что в безредукторном приводе соосной схемы валов винтокрылого летательного аппарата, содержащем корпус, предназначенный для размещения подшипниковых узлов, с установленной в нем системой концентрично расположенных внешнего и внутреннего валов соответственно нижнего и верхнего несущих винтов противоположного направления вращения с отдельными электрическими двигателями для приведения во вращение каждого из валов вокруг общей оси вращения, согласно предлагаемому техническому решению, корпус представляет собой последовательно установленные верхний и нижний опорные элементы, выполненные из материала с повышенной теплопроводностью, связанные между собой при помощи фланцев, расположенных на обращенных друг к другу торцах верхнего и нижнего опорных элементов, причем фланцы предназначены для крепления верхнего и нижнего опорных элементов к силовой раме винтокрылого аппарата, в стенках верхнего и нижнего опорных элементов выполнены продольные сквозные каналы, расположенные равномерно по окружности, оси которых параллельны общей оси вращения, и сквозные отверстия, расположенные равномерно по окружности напротив друг друга со стороны фланцев и сообщенные с продольными сквозными каналами, при этом оси отверстий перпендикулярны общей оси вращения, на внешних поверхностях верхнего и нижнего опорных элементов последовательно размещены верхний и нижний магнитопроводы статоров с обмотками, концентрично магнитопроводам установлены с возможностью вращения соответственно верхний и нижний роторы электрических двигателей, а привод снабжен крышками, размещенными на противоположных торцах верхнего и нижнего роторов, каждая из которых включает ступицу, обод и профилированные лопатки, расположенные радиально, концы которых связаны с соответствующей ступицей и ободом, причем внутренняя поверхность обода крышки верхнего ротора выполнена профилированной, ступица крышки верхнего ротора связана с внутренним валом верхнего несущего винта, в ободе крышки нижнего ротора выполнены сквозные отверстия, расположенные равномерно по окружности обода, и ее ступица связана с внешним валом нижнего несущего винта, а ободы крышек связаны с торцами соответственно верхнего и нижнего роторов.
Существенность отличительных признаков технического решения подтверждается тем, что только совокупность всех конструктивных признаков, описывающих изобретение, позволяет обеспечить решение технической проблемы с достижением заявленного технического результата, заключающегося в уменьшении продольных габаритных размеров при одновременном формировании направленного потока воздуха для охлаждения привода.
Изобретение поясняется следующим подробным описанием и иллюстрациями, где:
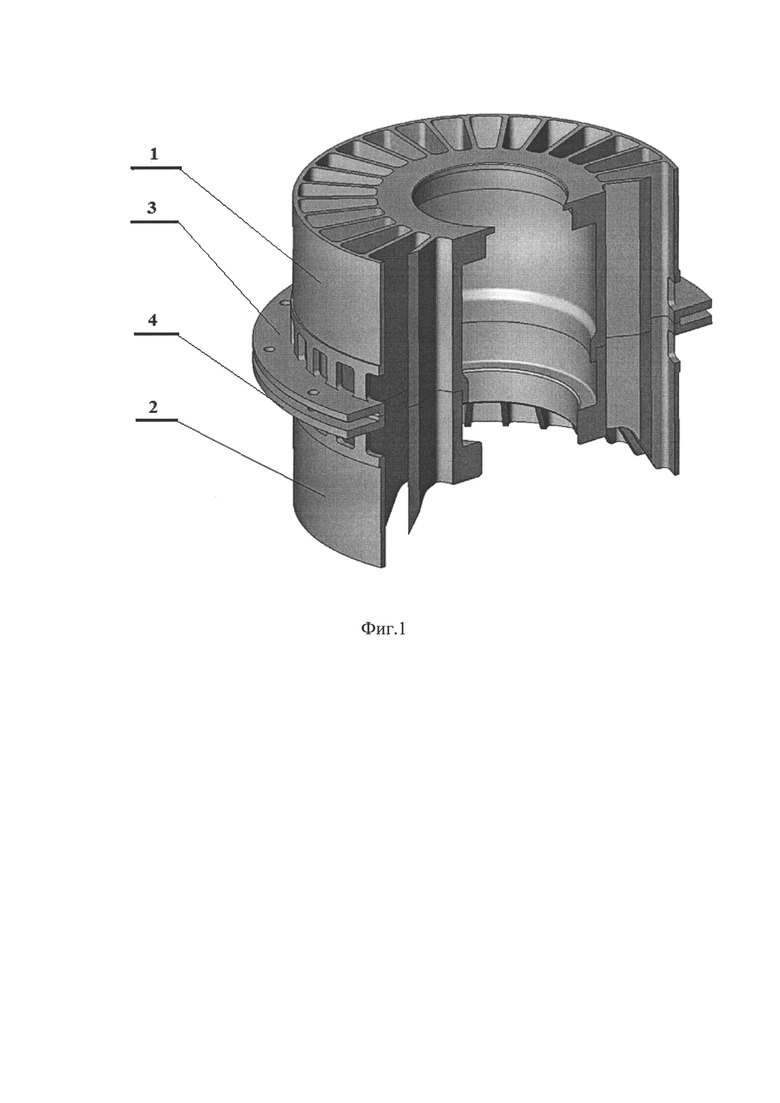
- на фиг. 1 изображена схема установки верхнего и нижнего опорных элементов;
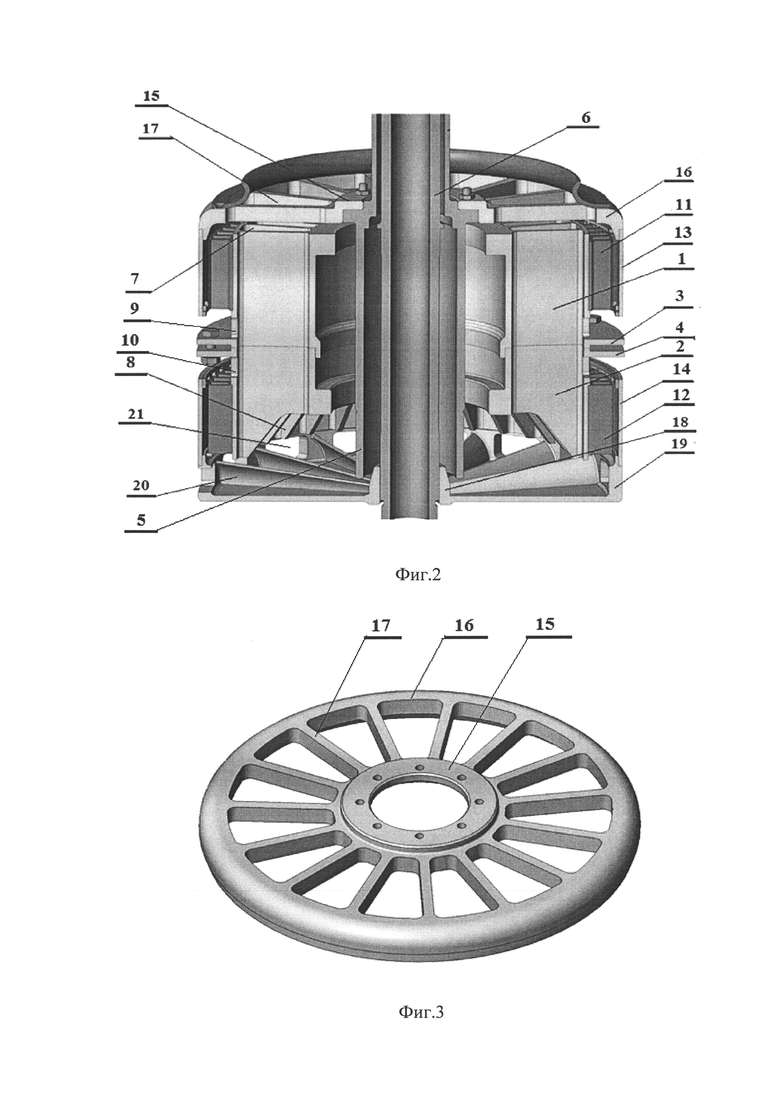
- на фиг. 2 изображена компоновочная схема размещение в корпусе элементов безредукторного привода;
- на фиг. 3 изображена крышка верхнего ротора;
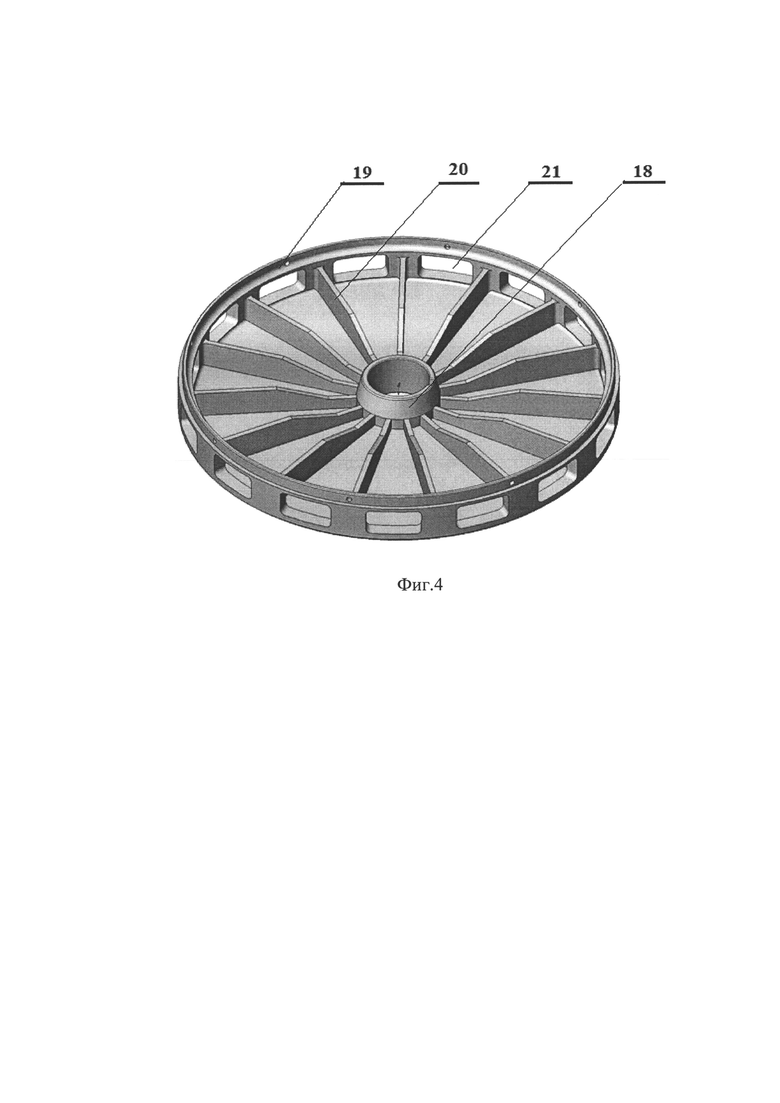
- на фиг. 4 изображена крышка нижнего ротора;
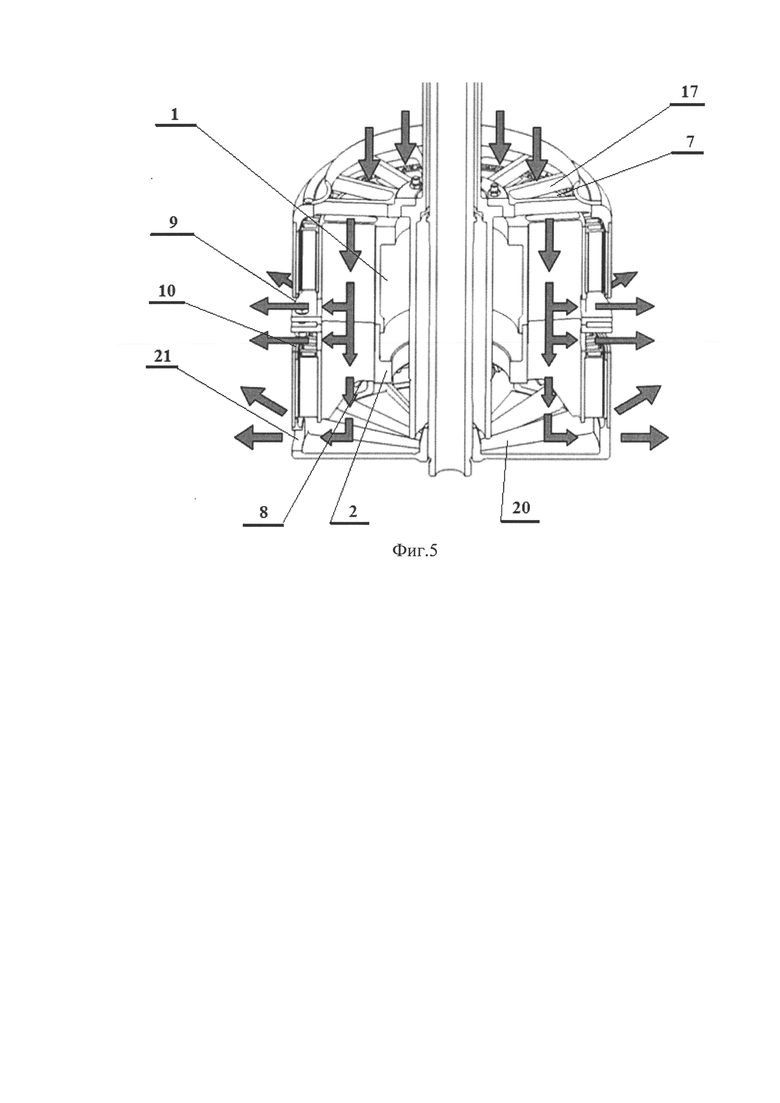
- на фиг. 5 изображена схема распределения воздушных потоков.
На фиг. 1-5 приняты следующие обозначения:
1 - верхний опорный элемент;
2 - нижний опорный элемент;
3 - фланец верхнего опорного элемента 1;
4 - фланец нижнего опорного элемента 2;
5 - внешний вал нижнего несущего винта;
6 - внутренний вал верхнего несущего винта;
7 - сквозные продольные каналы в стенках верхнего опорного элемента 1;
8 - сквозные продольные каналы в стенках нижнего опорного элемента 2;
9 - сквозные отверстия в стенках верхнего опорного элемента 1;
10 - сквозные отверстия в стенках нижнего опорного элемента 2;
11 - верхний магнитопровод статора;
12 - нижний магнитопровод статора;
13 - верхний ротор;
14 - нижний ротор;
15 - ступица крышки верхнего ротора 13;
16 - обод крышки верхнего ротора 13;
17 - лопатки крышки верхнего ротора 13;
18 - ступица крышки нижнего ротора 14;
19 - обод крышки нижнего ротора 14;
20 - лопатки крышки нижнего ротора 14;
21 - сквозные отверстия в ободе 19 крышки нижнего ротора 14.
Безредукторный привод соосной системы валов винтокрылого летательного аппарата содержит корпус, предназначенный для размещения подшипниковых узлов (на чертеже не показаны) и представляющий собой последовательно установленные верхний и нижний опорные элементы 1 и 2, выполненные из материала с повышенной теплопроводностью, например из алюминия, и связанные между собой при помощи фланца 3 верхнего опорного элемента 1 и фланца 4 нижнего опорного элемента 2, расположенных на обращенных друг к другу торцах опорных элементов 1 и 2 (см. фиг. 1). При этом фланцы 3 и 4 предназначены для крепления к силовой раме (на чертеже не показана) винтокрылого аппарата. В корпусе установлена система в виде концентрично расположенных внешнего вала 5 нижнего несущего винта и внутреннего вала 6 верхнего несущего винта (на чертеже не показаны), причем последние имеют противоположные направления вращения. При этом валы 5 и 6 кинематически сообщены с двумя отдельными электрическими двигателями (на чертеже не показаны), для которых корпус является общим, и каждый из которых предназначен для приведения во вращение соответствующего вала 5 и 6 вокруг общей оси вращения. В стенках верхнего опорного элемента 1 выполнены сквозные продольные каналы 7, расположенные равномерно по окружности, а в стенках нижнего опорного элемента 2 выполнены аналогичные сквозные продольные каналы 8, при этом при этом оси сквозных каналов 7 и 8 параллельны общей оси вращения. В стенках верхнего опорного элемента 1 выполнены сквозные отверстия 9, а в стенках нижнего опорного элемента 2 аналогичные сквозные отверстия 10. При этом сквозные отверстия 9 и 10 расположены равномерно по окружности со стороны фланцев 3 и 4 напротив друг друга, а оси сквозных отверстий 9 и 10 перпендикулярны общей оси вращения. На внешних поверхностях верхнего и нижнего опорных элементов 1 и 2 последовательно размещены верхний магнитопровод 11 и нижний магнитопровод 12 с обмотками (на чертеже не показаны) соответствующих статоров, а концентрично верхнему и нижнему магнитопроводам 11 и 12 установлены с возможностью вращения соответственно верхний ротор 13 и нижний ротор 14 (см. фиг. 2). Привод снабжен крышками, размещенными на противоположных торцах верхнего и нижнего роторов 13 и 14. Крышка верхнего ротора 13 включает ступицу 15, обод 16 и лопатки 17, противоположные концы которых связаны со ступицей 15 и ободом 16 (см. фиг. 3). Крышка нижнего ротора 14 включает ступицу 18, обод 19 и лопатки 20, противоположные концы которых связаны со ступицей 18 и ободом 19 (см. фиг. 4). При этом лопатки 17 крышки верхнего ротора 13 и лопатки 20 крышки нижнего ротора 14 расположены в плоскости общей оси вращения и выполнены профилированными, например, лопатки 17 крышки верхнего ротора 13 с постоянным по ширине профилем, а лопатки 20 крышки нижнего ротора 14 с переменным по ширине профилем. Внутренняя поверхность обода 16 крышки верхнего ротора 13 выполнена профилированной, образованной например вращением лемнискаты относительно общей оси вращения, а в ободе 19 крышки нижнего ротора 14 выполнены сквозные отверстия 21, расположенные равномерно по окружности обода 19 (см. фиг. 4). Ступица 15 крышки верхнего ротора 13 связана с внутренним валом 6 верхнего несущего винта, ступица 18 крышки нижнего ротора 14 с внешним валом 5 нижнего несущего винта. Ободы 16 и 19 крышек связаны соответственно с торцами верхнего и нижнего роторов 13 и 14 (см. фиг. 2).
Безредукторный привод соосной системы валов винтокрылого летательного аппарата работает следующим образом.
Крутящие моменты к внутреннему валу 6 верхнего несущего винта и внешнему валу 5 нижнего несущего винта передаются соответственно через ступицу 15 крышки верхнего ротора 13 и ступицу 18 крышки нижнего ротора 14. При этом последовательное расположение верхнего и нижнего магнитопроводов 11 и 12 статора позволяет уменьшить расстояние между размещенными в корпусе подшипниковыми узлами, а также исключить из конструкции привода автоматы перекоса, и в результате уменьшить габариты привода в продольном направлении. При этом возникает возможность использования жестких несущих винтов, управление которыми в процессе полета происходит за счет независимого изменения частот вращения внешнего и внутреннего валов 5 и 6. Выполнение внутренней поверхности обода 16 крышки верхнего ротора 13 профилированной позволяет уменьшить сопротивление входящему потоку воздуха, поэтому при вращении верхнего ротора 13 лопатки 17 работают как осевой насос, создающий область повышенного давления в верхней части привода. Одновременно при вращении нижнего ротора 14 лопатки 20 работают как центробежный насос. В результате в нижней части привода образуется область разряжения и формируется поток охлаждающего воздуха, направленный вниз. Выполнение верхнего и нижнего опорных элементов 1 и 2 из материала с повышенной теплопроводностью обеспечивает теплоотвод от верхнего и нижнего магнитопроводов 11 и 12 статора в стенки верхнего и нижнего опорных элементов 1 и 2. Поток воздуха последовательно проходит через сквозные продольные каналы 7 и 8, в результате чего осуществляется охлаждение стенок верхнего и нижнего опорных элементов 1 и 2 и охлаждаются обмотки верхнего и нижнего магнитопроводов 11 и 12 статора, которые являются основными тепловыделяющими источниками. При этом часть воздушного потока удаляется через сквозные отверстия 9 и 10, расположенные по окружности со стороны фланцев 3 и 4, а часть воздушного потока после прохождения через сквозные продольные каналы 8 удаляется через сквозные отверстия 21 в ободе 19 крышки нижнего ротора 14 (см. фиг. 5).
Таким образом, выполнение корпуса в виде последовательно установленных верхнего и нижнего опорных элементов, выполненных из материала с повышенной теплопроводностью, связанных между собой при помощи фланцев, расположенных на обращенных друг к другу торцах верхнего и нижнего опорных элементов и предназначенных для крепления опорных элементов к силовой раме винтокрылого аппарата, выполнение в стенках опорных элементов сквозных продольных каналов, расположенных равномерно по окружности, оси которых параллельны общей оси вращения, выполнение сквозных отверстий, оси которых перпендикулярны общей оси вращения и расположенных равномерно по окружности со стороны фланцев напротив друг друга в стенках верхнего и нижнего опорных элементов, последовательное размещение на внешних поверхностях верхнего и нижнего опорных элементов магнитопроводов статоров электрических двигателей с обмотками, установка концентрично магнитопроводам с возможностью вращения верхнего и нижнего роторов электрических двигателей, и снабжение привода крышками, размещенными на противоположных торцах роторов, каждая из которых включает ступицу и обод и профилированные лопатки, расположенные радиально, концы которых связаны с соответствующей ступицей и ободом, выполнение внутренней поверхности обода крышки верхнего ротора профилированной, связь ступицы крышки верхнего ротора с внутренним валом верхнего несущего винта, выполнение в ободе крышки нижнего ротора сквозных отверстий, расположенных равномерно по окружности обода, и связь ступицы последней с внешним валом нижнего несущего винта, а ободов крышек с торцами соответственно верхнего и нижнего роторов, обеспечивает достижение технического результата, заключающегося в уменьшении габаритных размеров при одновременном повышении эффективности охлаждения привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Компрессор низкого давления газотурбинного двигателя авиационного типа (варианты) | 2016 |
|
RU2614709C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОГО МОМЕНТА НЕСУЩЕГО ВИНТА ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1995 |
|
RU2099247C1 |
| Рабочее колесо четвёртой ступени ротора компрессора высокого давления (КВД) турбореактивного двигателя (варианты), диск рабочего колеса ротора КВД, лопатка рабочего колеса ротора КВД, лопаточный венец рабочего колеса ротора КВД | 2016 |
|
RU2630919C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОПРИВОДОМ | 2003 |
|
RU2266236C2 |
| Рабочее колесо третьей ступени ротора компрессора высокого давления (КВД) турбореактивного двигателя (варианты), диск рабочего колеса ротора КВД, лопатка рабочего колеса ротора КВД, лопаточный венец рабочего колеса ротора КВД | 2016 |
|
RU2630921C1 |
| Самотормозящийся сдвоенный аксиальный асинхронный электродвигатель | 2017 |
|
RU2642435C1 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| Компрессор низкого давления газотурбинного двигателя авиационного типа (варианты) | 2016 |
|
RU2614708C1 |
| Силовой привод соосной несущей системы винтокрылого летательного аппарата | 2024 |
|
RU2836061C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2415780C1 |
Изобретение относится к авиационной технике, а именно к конструкциям приводов винтов винтокрылого летательного аппарата. Безредукторный привод соосной схемы валов винтокрылого летательного аппарата содержит корпус, представляющий собой последовательно установленные верхний и нижний опорные элементы, выполненные из материала с повышенной теплопроводностью, связанные между собой при помощи фланцев для крепления опорных элементов к силовой раме аппарата. В стенках опорных элементов выполнены продольные сквозные каналы, оси которых параллельны общей оси вращения, и сквозные отверстия, расположенные по окружности напротив друг друга со стороны фланцев, сообщенные с продольными сквозными каналами. На внешних поверхностях опорных элементов последовательно размещены магнитопроводы статоров с обмотками. Привод снабжен крышками, размещенными на противоположных торцах роторов, каждая из которых включает ступицу, обод и профилированные лопатки, расположенные радиально. Ободья крышек связаны с торцами соответственно верхнего и нижнего роторов. Обеспечивается уменьшение продольных габаритных размеров при одновременном формировании направленного потока воздуха для охлаждения привода. 5 ил.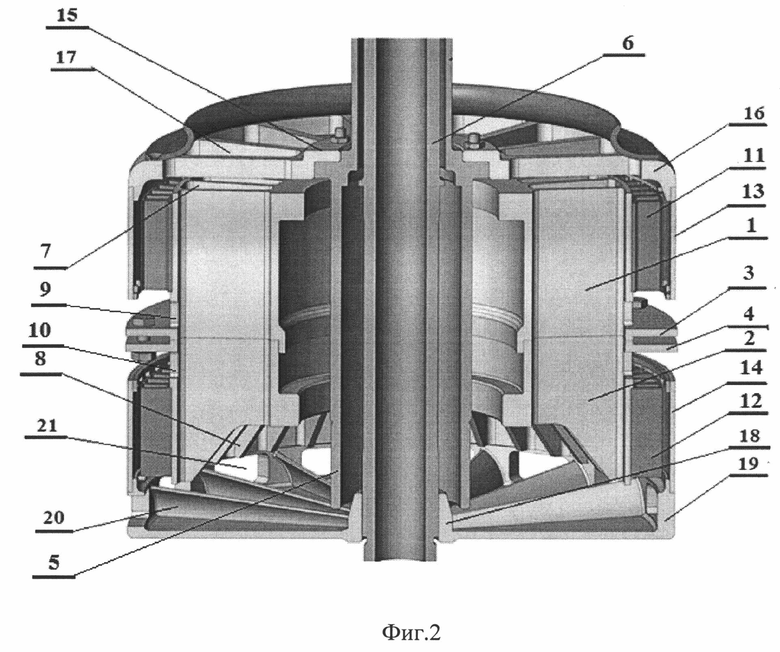
Безредукторный привод соосной схемы валов винтокрылого летательного аппарата, содержащий корпус, предназначенный для размещения подшипниковых узлов, с установленной в нем системой концентрично расположенных внешнего и внутреннего валов соответственно нижнего и верхнего несущих винтов противоположного направления вращения с отдельными электрическими двигателями для приведения во вращение каждого из валов вокруг общей оси вращения, отличающийся тем, что корпус представляет собой последовательно установленные верхний и нижний опорные элементы, выполненные из материала с повышенной теплопроводностью, связанные между собой при помощи фланцев, расположенных на обращенных друг к другу торцах верхнего и нижнего опорных элементов, причем фланцы предназначены для крепления верхнего и нижнего опорных элементов к силовой раме винтокрылого аппарата, в стенках верхнего и нижнего опорных элементов выполнены продольные сквозные каналы, расположенные равномерно по окружности, оси которых параллельны общей оси вращения, и сквозные отверстия, расположенные равномерно по окружности напротив друг друга со стороны фланцев и сообщенные с продольными сквозными каналами, при этом оси отверстий перпендикулярны общей оси вращения, на внешних поверхностях верхнего и нижнего опорных элементов последовательно размещены верхний и нижний магнитопроводы статоров с обмотками, концентрично магнитопроводам установлены с возможностью вращения соответственно верхний и нижний роторы электрических двигателей, а привод снабжен крышками, размещенными на противоположных торцах верхнего и нижнего роторов, каждая из которых включает ступицу, обод и профилированные лопатки, расположенные радиально, концы которых связаны с соответствующей ступицей и ободом, причем внутренняя поверхность обода крышки верхнего ротора выполнена профилированной, ступица крышки верхнего ротора связана с внутренним валом верхнего несущего винта, в ободе крышки нижнего ротора выполнены сквозные отверстия, расположенные равномерно по окружности обода, и ее ступица связана с внешним валом нижнего несущего винта, а ободы крышек связаны с торцами соответственно верхнего и нижнего роторов.
| Способ лазерного лечения постлучевого макулярного отека | 2020 |
|
RU2750969C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2013 |
|
RU2648502C2 |
| Вертолет соосной схемы (варианты) | 2023 |
|
RU2820875C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2811206C1 |
| СПОСОБ ЛЕЧЕНИЯ ХРОНИЧЕСКОГО РЕЦИДИВИРУЮЩЕГО ОСТЕОМИЕЛИТА ДЛИННЫХ КОСТЕЙ С ПРИМЕНЕНИЕМ КОЛЛАПАНА | 1998 |
|
RU2155552C2 |

