Область техники, к которой относится изобретение
Изобретение относится к области авиации, а именно к конструкциям приводов несущих винтов вертолетов и может быть использовано для винтокрылых летательных аппаратов, имеющих соосную несущую систему, в том числе сверхлегких.
Технический уровень
В последнее десятилетие произошло стремительное развитие электрических летательных аппаратов, связанное с качественным улучшением эффективности электромоторов. В настоящее время электромоторы имеют высокие показатели удельной мощности при компактных размерах и простоте конструкции. Это привело к тому, что электромоторы стали повсеместно использоваться на дронах, парапланах, легких самолетах, и рассматриваются как альтернатива тепловым двигателям в летательных аппаратах весом до нескольких тонн.
В подавляющем большинстве применяются установки с электромоторами прямого привода, в которых воздушный винт закреплен непосредственно на роторе электромотора. На мультикоптерах для повышения безопасности иногда делают комбинацию из двух таких установок, закрепляя ее через консоль, подходящую между винтами. В случае отказа одного из электромоторов один из винтов останавливается, оставшийся винт может частично скомпенсировать потерю тяги и сохранить управляемость мультикоптера. При этом необходимо отметить, что такая комбинация не может быть применена в качестве несущей системы соосного вертолета, поскольку работает только в составе мультироторной системы.
Несмотря на то, что силовая установка прямого привода является наиболее простой и эффективной, область ее применения ограничена особенностями характеристик электромоторов. Удельная мощность электромоторов снижается при понижении оборотов, и в настоящий момент электромоторы могут быть эффективными для авиации при частоте вращения примерно от 2000 об/мин и более. В то же самое время максимальная частота вращения вертолетного винта обратно пропорциональна его диаметру, поэтому в настоящее время прямой привод целесообразно использовать при винтах диаметром не более 2 м. В случае с вертолетами верхний предел частоты вращения для одноместного вертолета с максимальным взлетным весом 250 кг не превышает 1200-1500 об/мин, а винт имеет диаметр от 3,5 м. Таким образом, для использования электромоторов для вертолетов, способных перевозить грузы от 80-100 кг, необходимо понижение частоты вращения электромотора аналогично силовым установкам с поршневыми или газотурбинными двигателями.
На настоящий момент в мире используется большое количество серийно производимых вертолетов соосной схемы, вес самого легкого из них превышает 3200 кг, а основным производителем является АО «Камов». В разных странах неоднократно предпринимались попытки создать сверхлегкие 1-2х местные вертолеты соосной схемы, которые имели летающие образцы, но ни один из них не стал коммерчески успешным продуктом, в частности в связи с отсутствием силовых установок соответствующего веса.
Известно решение по патенту на полезную модель № 144 211 «ДВУХМОТОРНАЯ СИЛОВАЯ УСТАНОВКА ПРИВОДА ДВУХ СООСНЫХ ВОЗДУШНЫХ ВИНТОВ», в котором представлена двухмоторная силовая установка привода двух соосных воздушных винтов предназначена для применения на ударных беспилотных летательных аппаратах среднего класса с целью создания тяги для поддержания в полете данных летательных аппаратов. Для применения в силовой установке предлагается поршневой двигатель внутреннего сгорания (патент на ПМ №133568) что позволит разместить два таких двигателя по оси их коленчатых валов навстречу друг другу довольно компактно (соизмеримо с габаритами одного рядного четырехцилиндрового двигателя). Расположение двух двигателей по оси их коленчатых валов навстречу друг другу дает возможность получить вращение соосных воздушных винтов в противоположных направлениях, что обеспечивает необходимую тягу для поддержания летательного аппарата в полете. Применение двух двигателей обеспечивает безопасность полета при отказе одного из них. Применение цилиндрических редукторов, более простых в производстве, чем планетарные редукторы, соответственно снижает стоимость силовой установки в целом. Указанный патент перешел в общественное достояние.
Предлагаемая конструкция силового привода соосной несущей системы винтокрылого летательного аппарата позволяет решить ряд проблем соосной несущей системы, что особенно актуально для сверхлегких вертолетов в диапазоне весов 100-1000 кг.
Раскрытие сущности изобретения
Технический результат изобретения заключается в повышении безопасности, в повышении экономической эффективности за счет упрощения конструкции, а также в наличии возможности использования для сверхлегких летательных аппаратов за счет снижения веса конструкции.
Технический результат, связанный с повышением безопасности полета и с наличием возможности использования для сверхлегких летательных аппаратов, достигается тем, что предлагаемая система имеет меньшую сложность конструкции и большое количество резервируемых элементов, что существенным образом влияет на процесс управления и полет сверхлегкого вертолета. Как правило, система управления соосным вертолетом, позволяющая осуществлять безопасное приземление на авторотации при отказе силовой установки включает в себя полное управление роторами, подведенное через противовращающиеся валы и дополнительное управление килями. Эти устройства добавляют вес и усложняет конструкцию, что критично в области сверхлегких летательных аппаратов. Предлагаемое решение устраняет необходимость наличия части устройств, легко реализуется необходимое резервирование мощности при отказе части электромоторов, что позволяет обеспечить требуемый уровень безопасности без использования авторотации.
Технический результат, связанный с повышением экономической эффективности связан с упрощением конструкции и снижением затрат на ее производство. Предлагаемое решение не требует подвода механической энергии снаружи несущей системы, коммуникации и управление подводятся через неподвижную конструкцию. В то время как в существующих решениях, передача механической энергии на винты происходит от двигателей (редукторов), расположенных снаружи винтов, либо через соосные валы, вращающиеся один внутри другого, либо через осевой кардан с выходом между винтами и последующей раздачей вращения на два винта.
Технический результат, связанный с упрощением конструкции и снижением веса также связан с использование независимой многопоточной передачи мощности на зубчатые колеса, при этом возможно использование упрощенных принципов управления соосным вертолетом за счет резервирования мощности.
На Фиг. 1 представлен вариант общего вида заявленного силового привода. На Фиг.2 представлена структурная схема заявленного варианта силового привода соосной несущей системы (далее - СП СНС). В представленном варианте СП СНС состоит из следующих элементов: монтажных плит (1В, 1Н), электромоторов привода винтов (2В, 1Н), зубчатых колес ступиц (3В, 3Н), шестеренок привода винтов (4В, 4Н), ступиц винтов (5В, 5Н), трубчатой оси (6), электрических проводов (7).
Осуществление изобретения
Работа представленного силового привода в представленном варианте осуществляется следующим образом:
электропровода (7), проложенные внутри трубчатой оси (6), осуществляют подвод электрической энергии к соосной несущей системе в зону между винтами, где расположены электромоторы. Электромоторы привода винтов, которые подразделяются на электромоторы привода верхнего винта (2В) и электромоторы привода нижнего винта (2Н), установленные на верхней (1В) и нижней (1Н) монтажных плитах соответственно, прикрепленных неподвижно к трубчатой оси, передают вращение на винты через шестеренчатые пары, состоящие из шестеренок верхнего (4В) и нижнего (4Н) винта, а также зубчатых колес верхней (3В) и нижней ступицы (3Н). Передаточное соотношение шестеренчатых пар подбирается исходя из параметров электромоторов и несущей системы.
Минимально возможное количество электромоторов в приводе - два, по одному на каждый винт. Количество электромоторов, вращающих один винт, определяется конкретным техническим решением, зависящим от характеристик электромоторов, компоновочных ограничений, требований по безопасности и резервированию, оптимизацией ресурса шестеренчатых пар и другими. Крутящий момент передается с зубчатых колес на винты через ступицы или непосредственно втулки несущих винтов, опирающиеся через подшипники на трубчатую ось. Втулки несущих винтов (9), а также возможные системы управления общим и циклическим шагом винтов и контроллеры электромоторов (8) не являются составной частью рассматриваемого силового привода.
В частном случае, расчет количества электромоторов может быть осуществлен следующим образом.
Исходные данные:
• Потребная мощность одного винта несущей системы - NB
• Рабочая частота вращения винта – nB
Имеются электромоторы со следующими характеристиками:
• продолжительная мощность электромотора - Nconst
• максимальная мощность электромотора - Nmax
• частота вращения электромотора – nm
Требуется сохранение работоспособности привода при отказе одного электромотора.
Тогда расчет осуществляется следующим образом:
Требуемое количество электромоторов  на один винт для продолжительной работы:
на один винт для продолжительной работы:
 (1)
(1)
Требуемое количество электромоторов на один винт  для выполнения требований по резервированию мощности при отказе одного электромотора определяется из соотношения
для выполнения требований по резервированию мощности при отказе одного электромотора определяется из соотношения
 , из чего получаем
, из чего получаем
 (2)
(2)
Тогда требуемое количество электромоторов  на один винт:
на один винт:
 (3)
(3)
Общее количество электромоторов в приводе:
 (4)
(4)
Требуемое передаточное отношение:
 (5)
(5)
Изобретение относится к области авиации, а именно к конструкциям приводов несущих винтов вертолетов, и может быть использовано для винтокрылых летательных аппаратов, имеющих соосную несущую систему, в том числе сверхлёгких. Силовой привод соосной несущей системы закреплен между верхним и нижним винтами летательного аппарата на неподвижной трубчатой оси, являющейся также осью вращения винтов. Силовой привод состоит из как минимум двух электромоторов привода верхнего винта и двух электромоторов привода нижнего винта, расположенных по окружностям зубчатых колес верхнего и нижнего винтов соответственно, шестеренок привода винтов и электрических проводов. При этом электромоторы привода одного винта передают совместно крутящий момент на зубчатое колесо верхнего или нижнего винта соответственно. Обеспечивается повышение безопасности, возможность использования для сверхлегких летательных аппаратов за счет снижения веса конструкции. 3 з.п. ф-лы, 2 ил.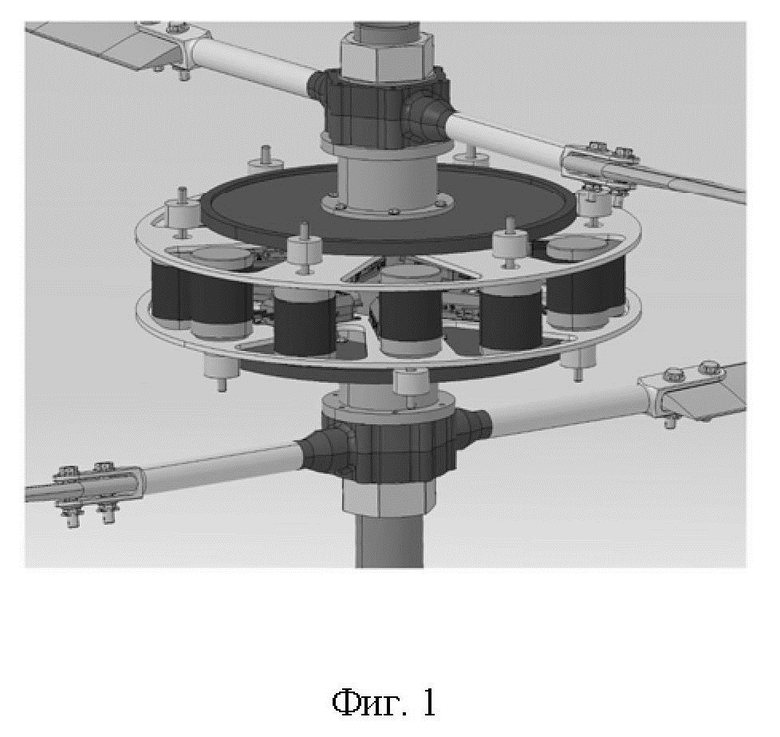
1. Силовой привод соосной несущей системы, крепление которого осуществляется между верхним и нижним винтами летательного аппарата на неподвижной трубчатой оси, являющейся также осью вращения винтов, и состоящий из как минимум двух закрепленных электромоторов привода верхнего винта и двух электромоторов привода нижнего винта, расположенных по окружностям зубчатых колес верхнего и нижнего винтов соответственно, шестеренок привода винтов и электрических проводов, и в котором электромоторы привода одного винта передают совместно крутящий момент на зубчатое колесо верхнего или нижнего винта соответственно.
2. Силовой привод по п.1, в котором для крепления электромоторов используются две монтажные плиты.
3. Силовой привод по п.1, в котором передача вращения от зубчатых колес осуществляется при помощи ступиц.
4. Силовой привод по п.1, в котором выходные валы электромоторов верхнего винта направлены вверх в сторону верхнего винта, а выходные валы электромоторов нижнего винта направлены вниз.
| ДВИГАТЕЛЬНАЯ И ПЕРЕДАЮЩАЯ ДВИЖЕНИЕ СБОРКА, В ЧАСТНОСТИ, ДЛЯ ВИНТОКРЫЛЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2568154C2 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ РАБОТЫ ДАТЧИКОВПЕРЕГРУЗКИ | 0 |
|
SU219920A1 |
| Электрический привод соосных винтов вертолета (варианты) | 2019 |
|
RU2715113C1 |
| US 11292588 B1, 05.04.2022 | |||
| US 20140091172 A1, 03.04.2014. | |||

