Область техники, к которой относится изобретение
[0001] Настоящая технология в целом относится к подъемным узлам, к платформам, оснащенным подъемными узлами, и к складским роботам, оснащенным платформами с подъемными узлами.
Уровень техники
[0002] Роботизированные транспортные средства широко используются в целом ряде отраслей для различных целей, в частности, для визуального осмотра и транспортировки различных предметов. Например, в некоторых случаях роботизированные транспортные средства используются для перемещения предметов, хранящихся на складе.
[0003] Одни роботизированные транспортные средства программируются для движения по заданным маршрутам или ориентируются на использование указателей для навигации по складскому пространству. Другие роботизированные транспортные средства оснащаются дополнительными системами для «автономной» адаптации к изменениям планировки складского пространства или к возникающим в реальном времени препятствиям, что повышает их общую эффективность и безопасность при организации складской логистики.
[0004] В некоторых случаях такие роботизированные транспортные средства оснащены подъемными узлами, обеспечивающими перемещение по меньшей мере их части в вертикальном направлении, например, за счет соединения с направляющими складских стеллажей. Подобные подъемные узлы могут подвергаться большим нагрузкам, особенно когда на них размещен какой-либо предмет. Кроме того, такие подъемные узлы могут отсоединяться от направляющей во время работы.
[0005] В известных технических решениях был предложен ряд способов для решения вышеуказанной технической проблемы.
[0006] В патентной заявке CN 115367358 A «Storage Robot» («Складской робот»), опубл. 22.11.2022 г. и принадлежащей компании Hangzhou HC Information Tech Co LTD, раскрыт складской робот с подъемным механизмом, обеспечивающим подъем и опускание этого складского робота вдоль вертикальной направляющей.
Раскрытие изобретения
[0007] Целью настоящей технологии является устранение по меньшей мере части недостатков известных технических решений.
[0008] В соответствии с широким аспектом настоящей технологии реализован подъемный узел для складского робота. Подъемный узел содержит подъемную раму, зубчатое колесо, первый ролик, второй ролик и третий ролик. Подъемная рама имеет продольную центральную плоскость. Зубчатое колесо соединено с возможностью его вращения с подъемной рамой и функционально связано с двигателем. Зубчатое колесо способно вращаться вокруг оси зубчатого колеса, по существу перпендикулярной продольной центральной плоскости, и способно взаимодействовать с направляющей для обеспечения приводного усилия. Первый ролик соединен с возможностью его вращения с подъемной рамой, расположен сбоку на расстоянии от зубчатого колеса, способен вращаться вокруг оси первого ролика, по существу параллельной оси зубчатого колеса, и способен упираться в переднюю поверхность первого сегмента направляющей. Второй ролик соединен с возможностью его вращения с подъемной рамой, разнесен с первым роликом в продольном направлении и по вертикали, способен вращаться вокруг оси второго ролика, по существу параллельной оси первого ролика, с меньшим расстоянием по вертикали между осью второго ролика и осью зубчатого колеса, чем радиус зубчатого колеса, и способен упираться в заднюю поверхность первого сегмента направляющей. Третий ролик соединен с возможностью его вращения с подъемной рамой, расположен сбоку на расстоянии от зубчатого колеса, способен вращаться вокруг оси третьего ролика, по существу параллельной продольной центральной плоскости, и способен упираться во второй сегмент направляющей, соединенный с первым сегментом. При взаимодействии подъемного узла с направляющей первый и второй ролики способны охватывать первый сегмент с двух сторон, ограничивая перемещение подъемной рамы в продольном направлении, а третий ролик способен упираться во второй сегмент, ограничивая перемещение подъемной рамы в поперечном направлении.
[0009] В некоторых вариантах осуществления рама содержит кронштейн, а первый, второй и/или третий ролики соединены с возможностью их вращения с кронштейном.
[0010] В некоторых вариантах осуществления ось второго ролика расположена по вертикали ниже оси первого ролика.
[0011] В некоторых вариантах осуществления ось второго ролика расположена по вертикали выше оси зубчатого колеса или по существу совпадает с ней.
[0012] В некоторых вариантах осуществления ось третьего ролика расположена по вертикали ниже оси первого ролика и/или оси второго ролика.
[0013] В некоторых вариантах осуществления расстояние между осью зубчатого колеса и осью первого ролика меньше расстояния между осью первого ролика и осью второго ролика.
[0014] В некоторых вариантах осуществления расстояние между осью зубчатого колеса и осью первого ролика меньше расстояния между осью зубчатого колеса и осью второго ролика.
[0015] В некоторых вариантах осуществления расстояние между осью зубчатого колеса и осью первого ролика меньше радиуса зубчатого колеса.
[0016] В некоторых вариантах осуществления второй ролик выровнен с первым роликом в поперечном направлении.
[0017] В некоторых вариантах осуществления подъемный узел дополнительно содержит четвертый ролик, соединенный с возможностью его вращения с подъемной рамой, расположенный сбоку на расстоянии от зубчатого колеса и способный вращаться вокруг оси четвертого ролика, по существу параллельной оси зубчатого колеса и расположенной ниже нее.
[0018] В некоторых вариантах осуществления расстояние между осью четвертого ролика и осью первого ролика меньше диаметра зубчатого колеса.
[0019] В некоторых вариантах осуществления расстояние между осью зубчатого колеса и осью четвертого ролика равно расстоянию между осью зубчатого колеса и осью первого ролика.
[0020] В некоторых вариантах осуществления расстояние между осью зубчатого колеса и осью четвертого ролика меньше радиуса зубчатого колеса.
[0021] В некоторых вариантах осуществления первый сегмент по существу перпендикулярен продольной центральной плоскости.
[0022] В некоторых вариантах осуществления второй сегмент по существу перпендикулярен первому сегменту.
[0023] В некоторых вариантах осуществления подъемный узел дополнительно содержит центрирующий элемент, обеспечивающий центрирование зубчатого колеса относительно направляющей.
[0024] В некоторых вариантах осуществления продольная центральная плоскость задает первую боковую сторону и вторую боковую сторону. На первой боковой стороне размещены первый, второй и третий ролики. Подъемный узел дополнительно содержит четвертый, пятый и шестой ролики. Четвертый ролик соединен с возможностью его вращения с подъемной рамой, расположен сбоку на расстоянии от зубчатого колеса на второй боковой стороне, выровнен по оси первого ролика и способен вращаться вокруг нее, а также способен упираться в переднюю поверхность третьего сегмента направляющей, размещенного сбоку на расстоянии от переднего сегмента. Пятый ролик соединен с возможностью его вращения с подъемной рамой, разнесен с четвертым роликом в продольном направлении и по вертикали, размещен на второй боковой стороне, выровнен по оси второго ролика и способен вращаться вокруг нее, а также способен упираться в заднюю поверхность третьего сегмента направляющей. Шестой ролик соединен с возможностью его вращения с подъемной рамой, расположен сбоку на расстоянии от зубчатого колеса, размещен на второй боковой стороне, способен вращаться вокруг оси шестого ролика, по существу параллельной продольной центральной плоскости, и способен упираться в четвертый сегмент направляющей, соединенный с третьим сегментом.
[0025] В некоторых вариантах осуществления подъемный узел дополнительно содержит седьмой и восьмой ролики, соединенные с возможностью их вращения с подъемной рамой. Седьмой ролик расположен сбоку на расстоянии от зубчатого колеса на первой стороне, способен вращаться вокруг оси седьмого ролика, по существу параллельной оси зубчатого колеса, и находится по вертикали ниже оси зубчатого колеса. Восьмой ролик расположен сбоку на расстоянии от зубчатого колеса на второй стороне, способен вращаться вокруг оси седьмого ролика и находится по вертикали ниже оси зубчатого колеса.
[0026] В соответствии с другим аспектом настоящей технологии реализована платформа для складского робота, содержащая раму платформы и один или несколько подъемных узлов. Один или несколько подъемных узлов соединены с рамой платформы и каждый из них содержит подъемную раму, зубчатое колесо, первый ролик, второй ролик и третий ролик. Подъемная рама имеет продольную центральную плоскость. Зубчатое колесо соединено с возможностью его вращения с подъемной рамой и функционально связано с двигателем. Зубчатое колесо способно вращаться вокруг оси зубчатого колеса, по существу перпендикулярной продольной центральной плоскости, и способно взаимодействовать с направляющей для обеспечения приводного усилия. Первый ролик соединен с возможностью его вращения с подъемной рамой, расположен сбоку на расстоянии от зубчатого колеса, способен вращаться вокруг оси первого ролика, по существу параллельной оси зубчатого колеса, и способен упираться в переднюю поверхность первого сегмента направляющей. Второй ролик соединен с возможностью его вращения с подъемной рамой, выровнен с первым роликом в поперечном направлении и разнесен с ним в продольном направлении и по вертикали, а также способен вращаться вокруг оси второго ролика, по существу параллельной оси первого ролика, с меньшим расстоянием между осью второго ролика и осью зубчатого колеса, чем радиус зубчатого колеса. Второй ролик способен упираться в заднюю поверхность первого сегмента направляющей. Третий ролик соединен с возможностью его вращения с подъемной рамой, расположен сбоку на расстоянии от зубчатого колеса, способен вращаться вокруг оси третьего ролика, по существу параллельной продольной центральной плоскости, и способен упираться во второй сегмент направляющей, соединенный с первым сегментом. При взаимодействии подъемного узла с направляющей первый и второй ролики способны охватывать первый сегмент с двух сторон, ограничивая перемещение подъемной рамы в продольном направлении, а третий ролик способен упираться во второй сегмент, ограничивая перемещение подъемной рамы в поперечном направлении.
[0027] В соответствии с еще одним аспектом настоящей технологии реализован складской робот, содержащий первую платформу, способную перемещаться относительно пола, и вторую платформу, функционально связанную с первой платформой. Первая платформа содержит первую раму и один или несколько узлов перемещения, соединенных с первой рамой. Вторая платформа содержит вторую раму и один или несколько подъемных узлов, соединенных со второй рамой. Каждый из подъемных узлов содержит подъемную раму, зубчатое колесо, а также первый, второй и третий ролики, соединенные с возможностью его вращения с подъемной рамой. Подъемная рама имеет продольную центральную плоскость. Зубчатое колесо соединено с возможностью его вращения с подъемной рамой и функционально связано с двигателем. Зубчатое колесо способно вращаться вокруг оси зубчатого колеса, по существу перпендикулярной продольной центральной плоскости, и способно взаимодействовать с направляющей для обеспечения приводного усилия. Первый ролик расположен сбоку на расстоянии от зубчатого колеса, способен вращаться вокруг оси первого ролика, по существу параллельной оси зубчатого колеса, и способен упираться в переднюю поверхность первого сегмента направляющей. Второй ролик разнесен с первым роликом в продольном направлении и по вертикали, способен упираться в заднюю поверхность первого сегмента направляющей и способен вращаться вокруг оси второго ролика, по существу параллельной оси первого ролика, с меньшим расстоянием между осью второго ролика и осью зубчатого колеса, чем радиус зубчатого колеса. Третий ролик расположен сбоку на расстоянии от зубчатого колеса, способен вращаться вокруг оси третьего ролика, по существу параллельной продольной центральной плоскости, и способен упираться во второй сегмент направляющей, соединенный с первым сегментом. При взаимодействии подъемного узла с направляющей первый и второй ролики способны охватывать первый сегмент с двух сторон, ограничивая перемещение подъемной рамы в продольном направлении, а третий ролик способен упираться во второй сегмент, ограничивая перемещение подъемной рамы в поперечном направлении.
[0028] В контексте настоящего описания термин «электронное устройство» используется для обозначения любых компьютерных аппаратных средств, способных обеспечивать работу программного обеспечения, подходящего для решения поставленной задачи. В контексте настоящего описания термин «электронное устройство» подразумевает, что устройство может функционировать в качестве сервера для других электронных и клиентских устройств, впрочем, это не носит обязательного характера для настоящей технологии. Таким образом, примерами (не имеющими ограничительного характера) электронных устройств являются персональные компьютеры (настольные компьютеры, ноутбуки, нетбуки и т.п.), смартфоны и планшеты, а также сетевое оборудование, например, маршрутизаторы, коммутаторы и шлюзы. Следует понимать, что в данном контексте факт функционирования оборудования в качестве электронного устройства не означает, что оно не может функционировать в качестве сервера для других электронных устройств. Употребление выражения «электронное устройство» не исключает использования нескольких клиентских устройств для приема, передачи, выполнения или инициирования выполнения каких-либо задач или запросов, результатов каких-либо задач или запросов либо шагов какого-либо описанного здесь способа.
[0029] В настоящей заявке термины, относящиеся к пространственной ориентации, такие как вперед, назад, вверх, вниз, влево и вправо, соответствуют их общепринятому пониманию пользователем или оператором роботизированного транспортного средства. Термины, относящиеся к пространственной ориентации, при описании или указании элементов или подсистем устройства отдельно от устройства следует понимать так, как если бы эти элементы или подсистемы были установлены на устройстве.
[0030] Каждый вариант осуществления настоящей технологии относится к по меньшей мере одному из вышеупомянутых аспектов, но не обязательно ко всем ним. Следует понимать, что некоторые аспекты настоящей технологии, связанные с попыткой достижения вышеупомянутой цели, могут не соответствовать этой цели и/или могут соответствовать другим целям, не упомянутым здесь явным образом.
[0031] Дополнительные и/или альтернативные признаки, аспекты и преимущества вариантов осуществления настоящей технологии содержатся в дальнейшем описании, на приложенных чертежах и в формуле изобретения.
Краткое описание чертежей
[0032] Для более полного понимания настоящей технологии, ее аспектов и дополнительных признаков следует обратиться к следующему описанию, которое должно использоваться в сочетании с сопроводительными чертежами.
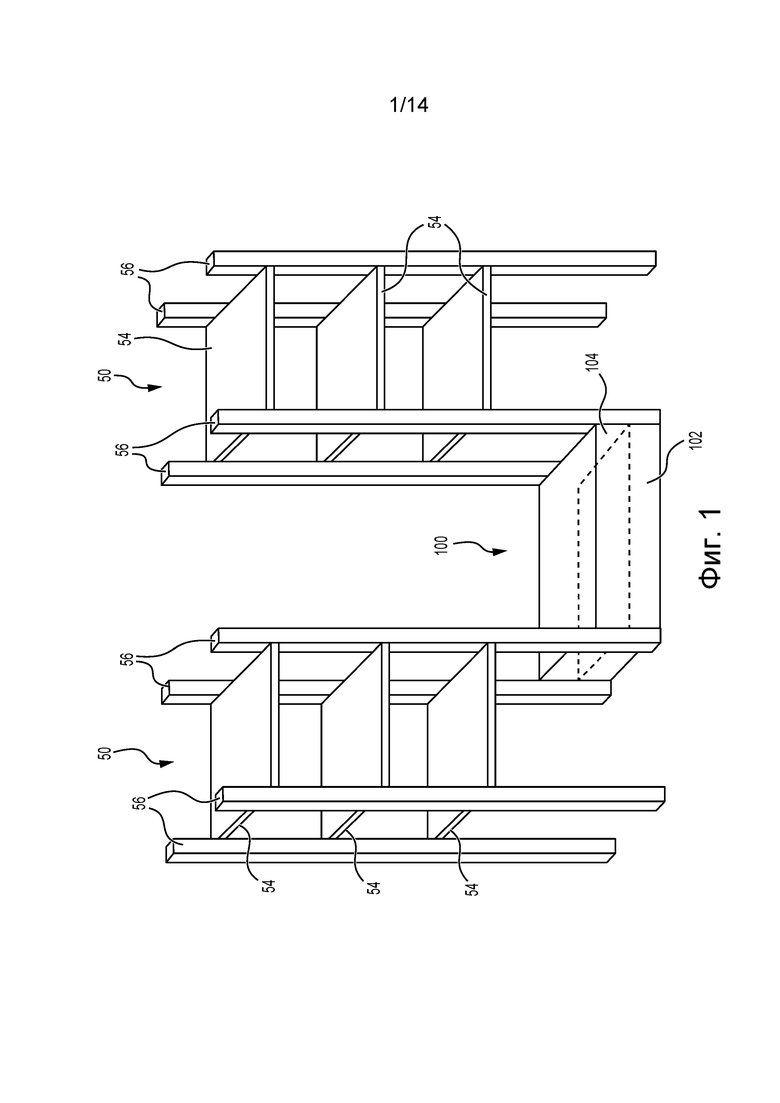
[0033] На фиг. 1 представлен аксонометрический вид роботизированного транспортного средства, расположенного между двумя складскими стеллажами, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
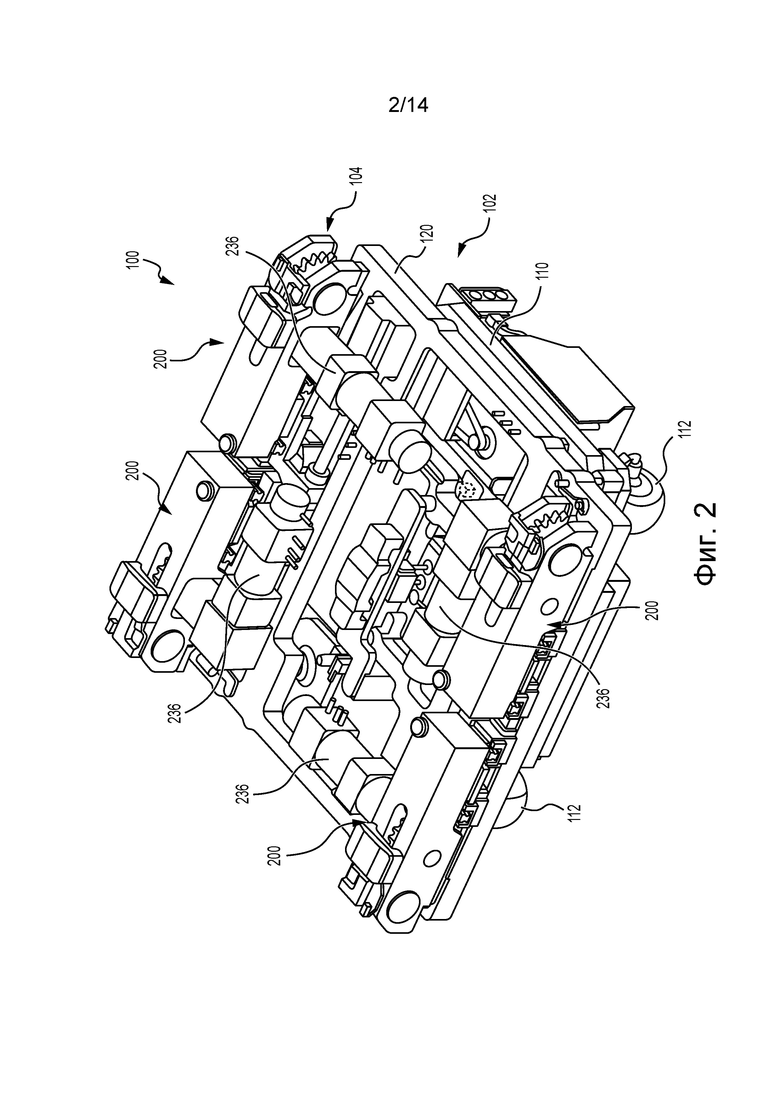
[0034] На фиг. 2 представлен еще один аксонометрический вид роботизированного транспортного средства, показанного на фиг. 1, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
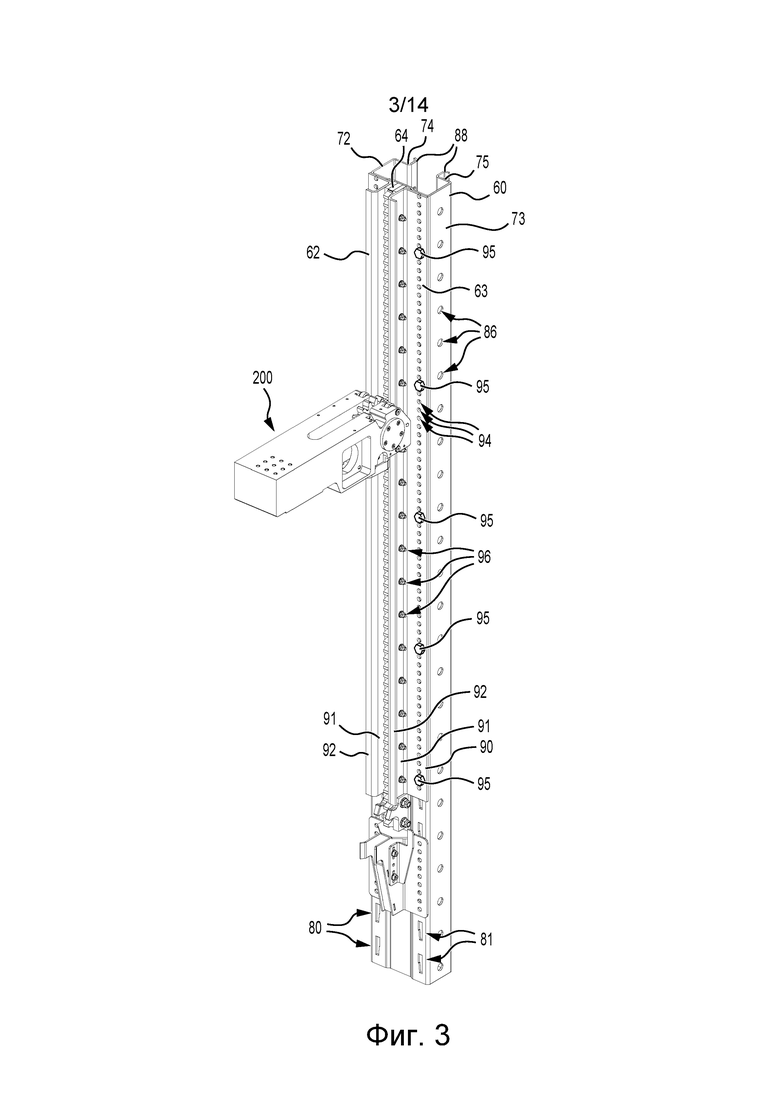
[0035] На фиг. 3 представлен аксонометрический вид подъемного узла роботизированного транспортного средства, показанного на фиг. 1, соединенного с направляющей складского стеллажа, показанного на фиг. 1, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
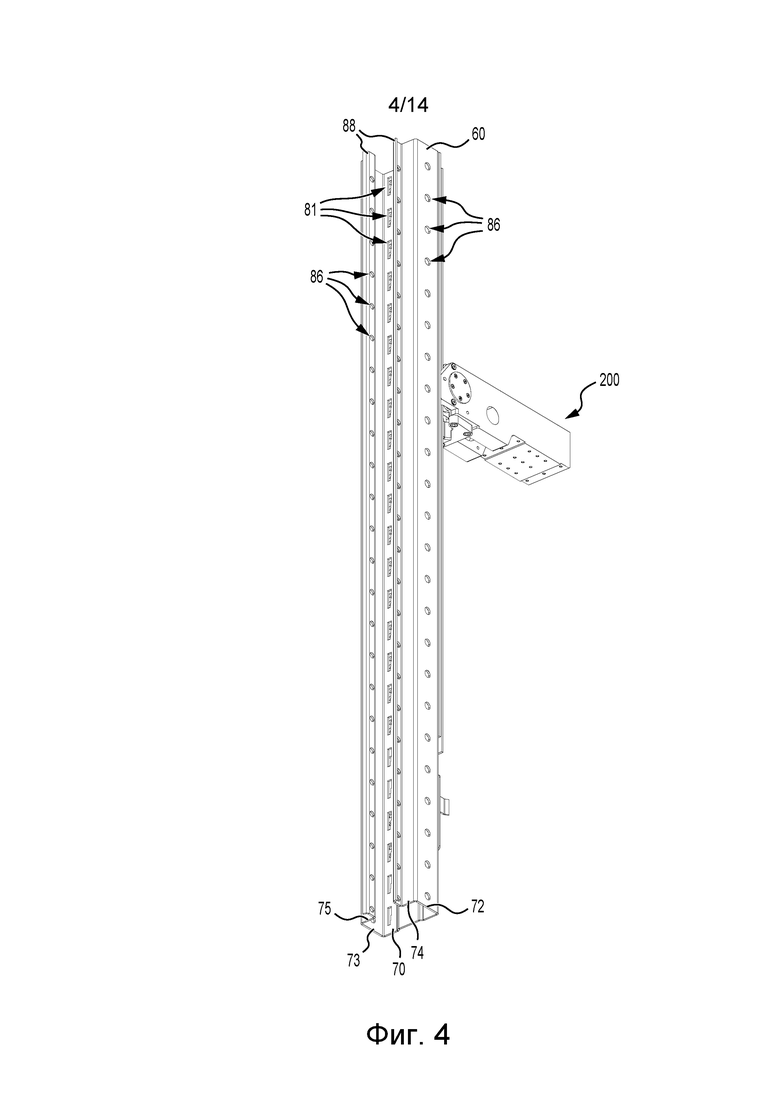
[0036] На фиг. 4 представлен аксонометрический вид подъемного узла и направляющей, показанных на фиг. 3, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
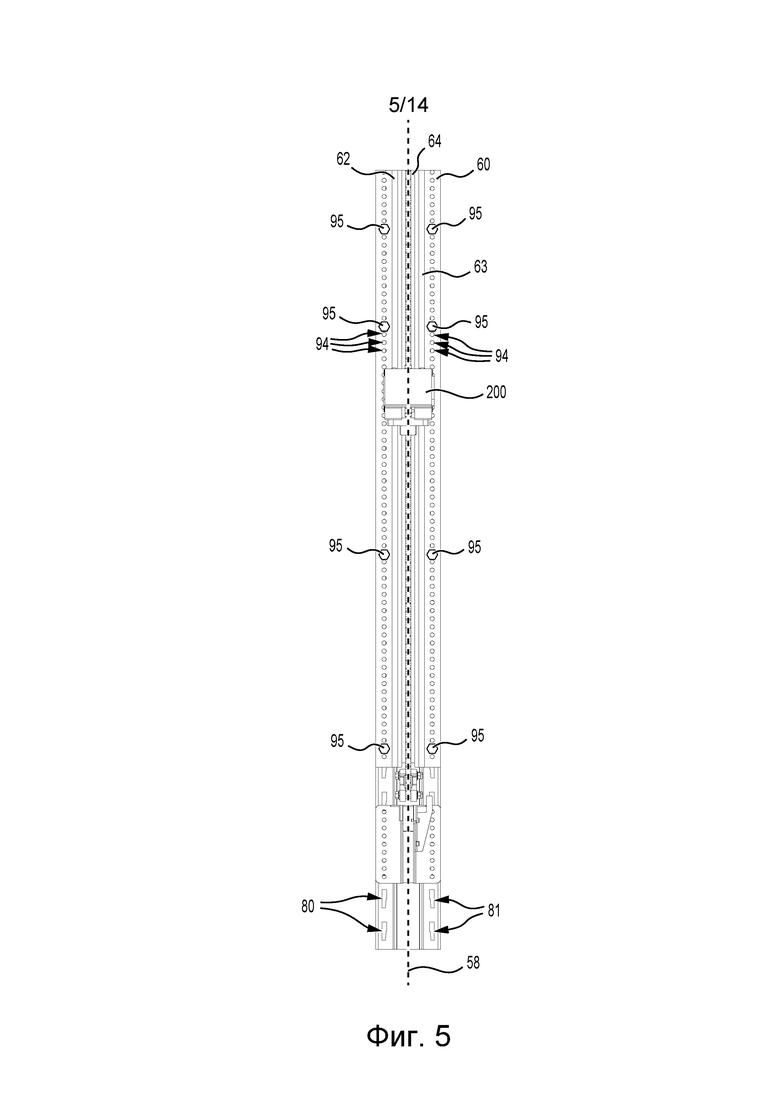
[0037] На фиг. 5 представлен вид сбоку подъемного узла и направляющей, показанных на фиг. 3, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
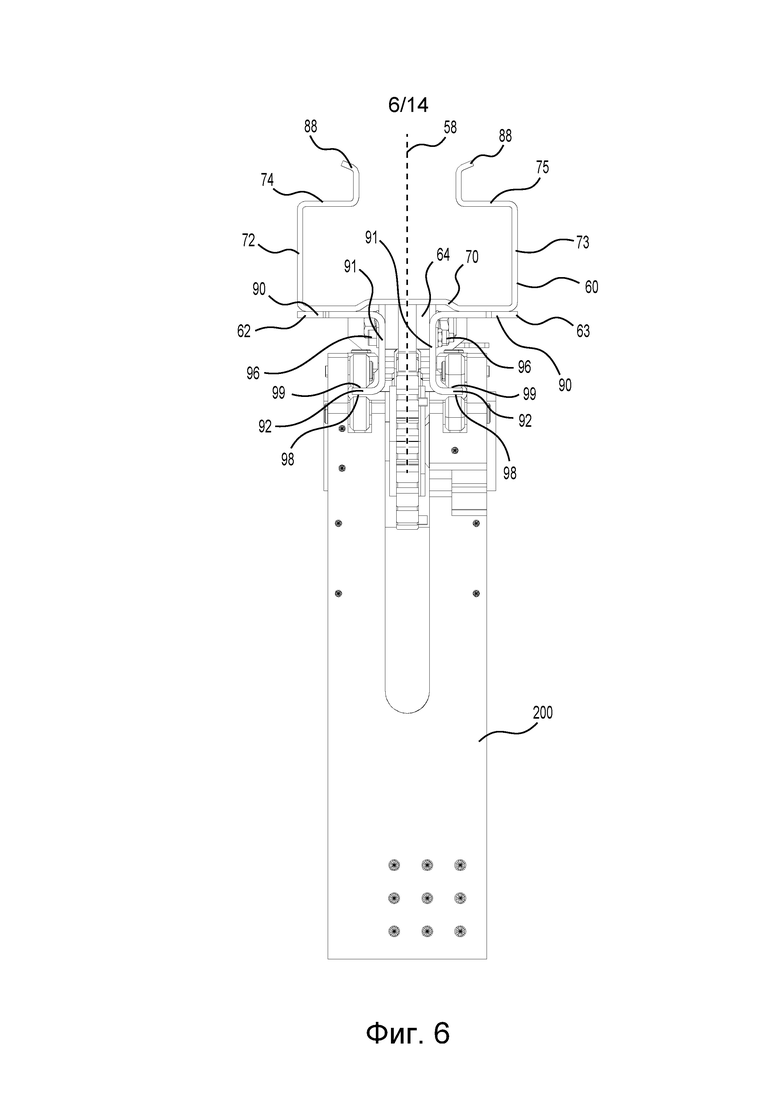
[0038] На фиг. 6 представлен вид сверху подъемного узла и направляющей, показанных на фиг. 3, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
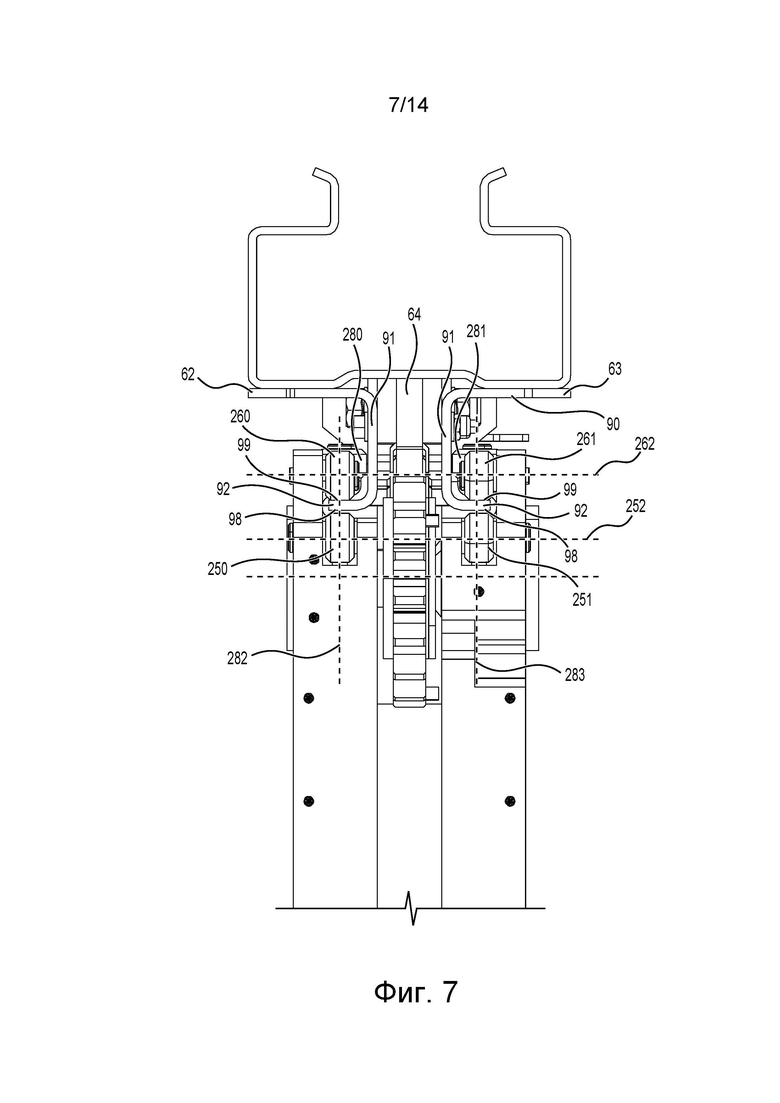
[0039] На фиг. 7 представлен вид в увеличенном масштабе части подъемного узла и направляющей, показанных на фиг. 6, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
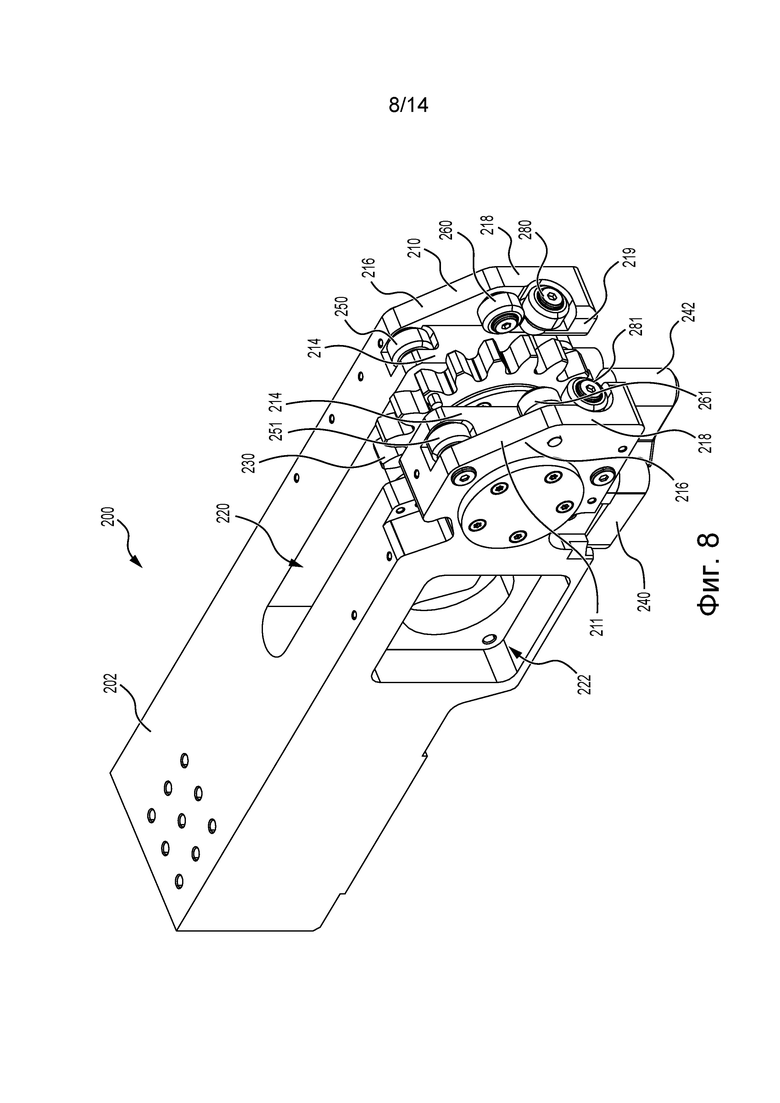
[0040] На фиг. 8 представлен аксонометрический вид подъемного узла, показанного на фиг. 3, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
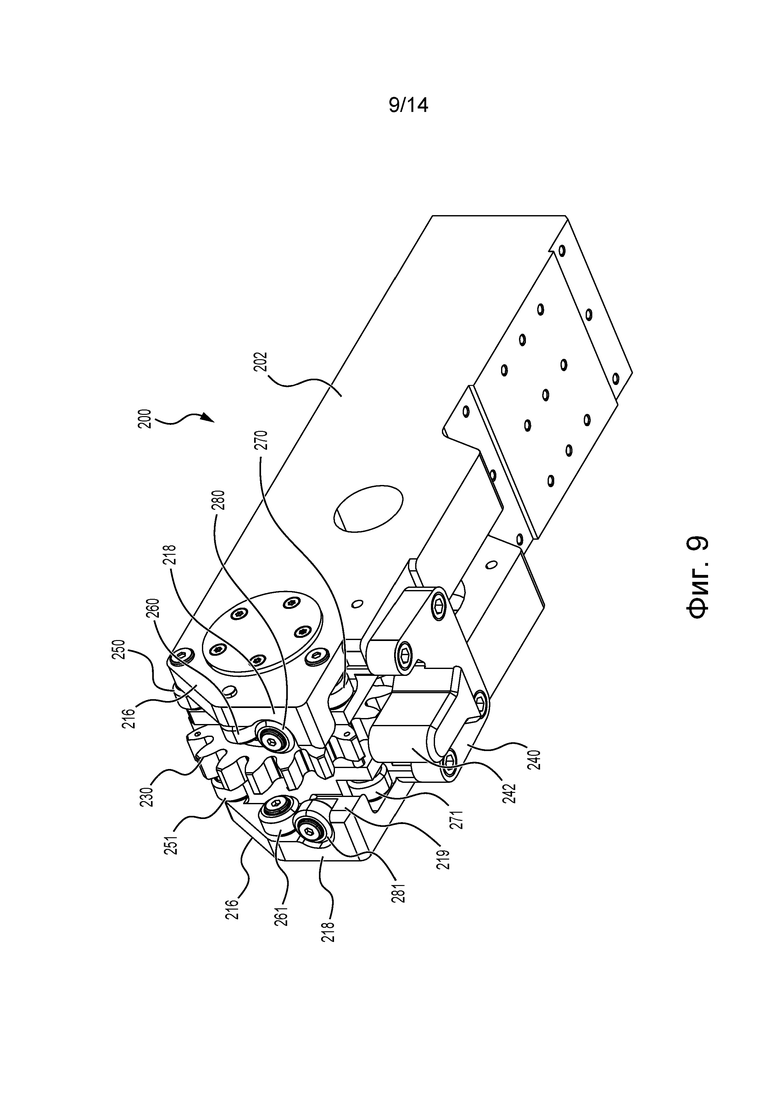
[0041] На фиг. 9 представлен аксонометрический вид подъемного узла, показанного на фиг. 7, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
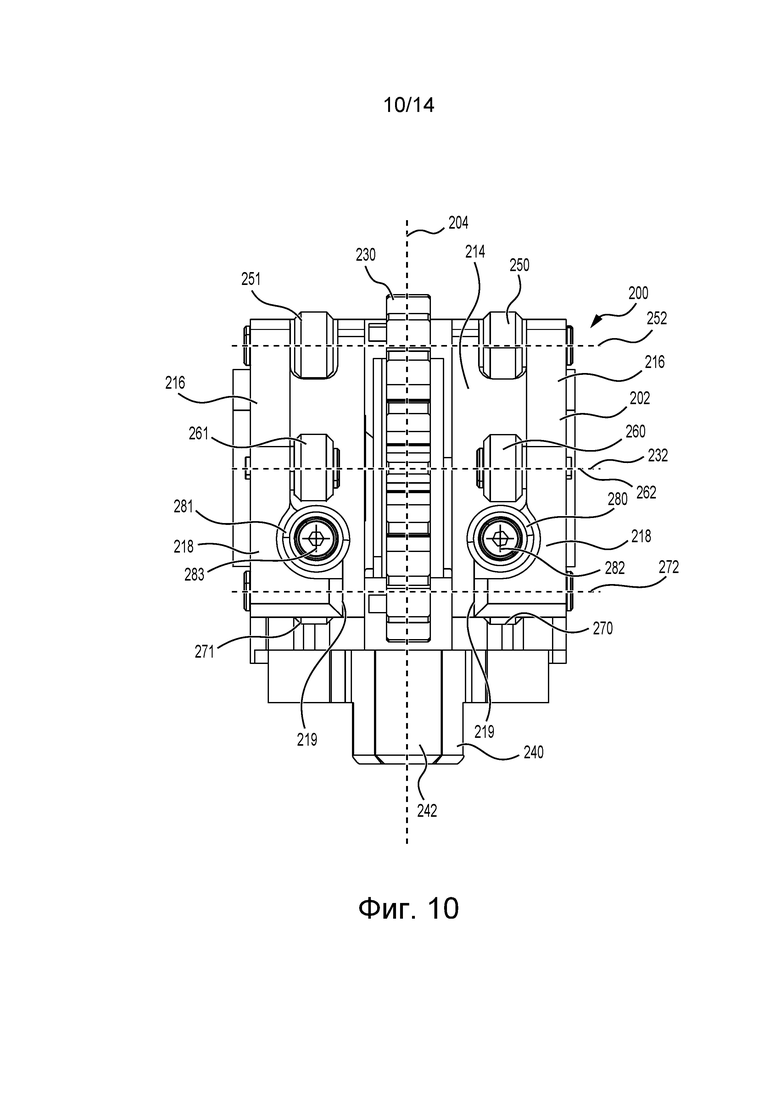
[0042] На фиг. 10 представлен вид сбоку подъемного узла, показанного на фиг. 7, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
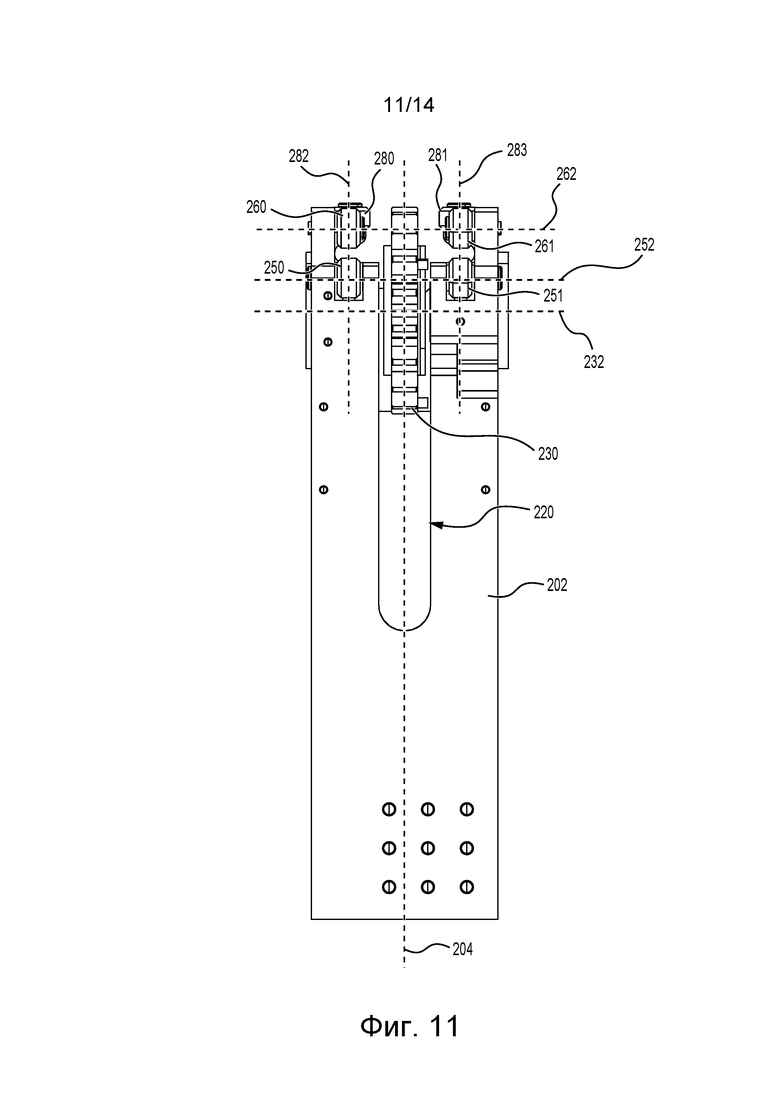
[0043] На фиг. 11 представлен вид сверху подъемного узла, показанного на фиг. 7, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
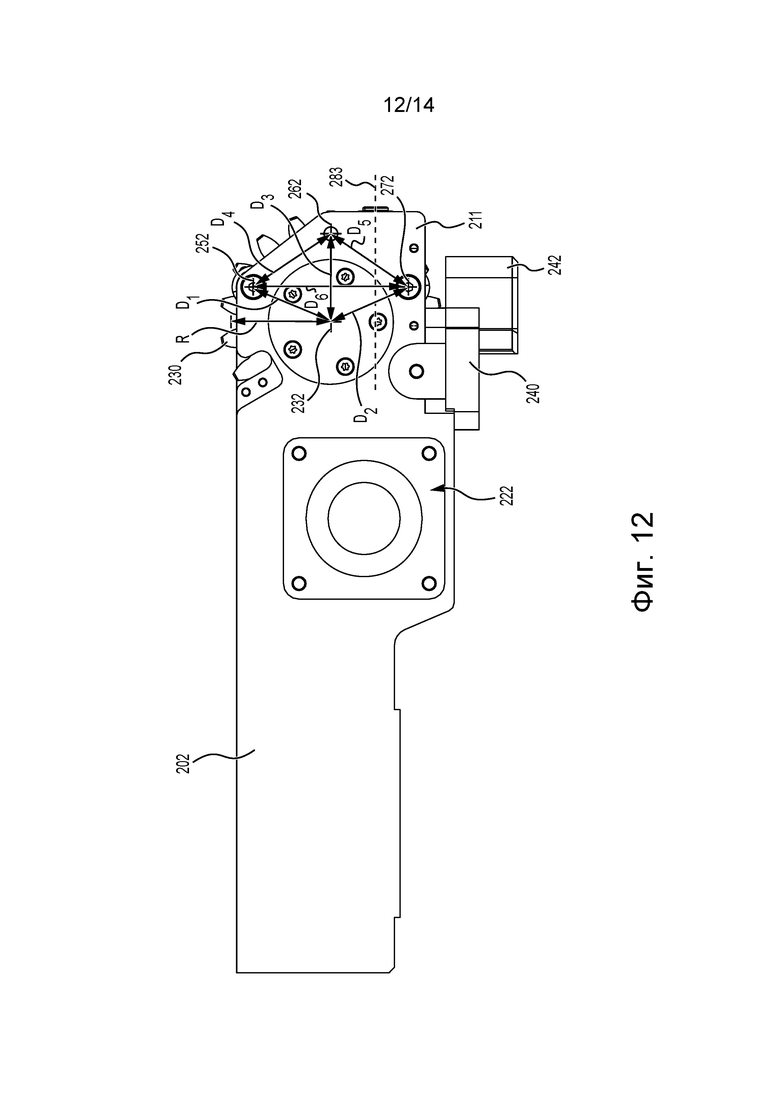
[0044] На фиг. 12 представлен вертикальный вид сбоку подъемного узла, показанного на фиг. 7, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
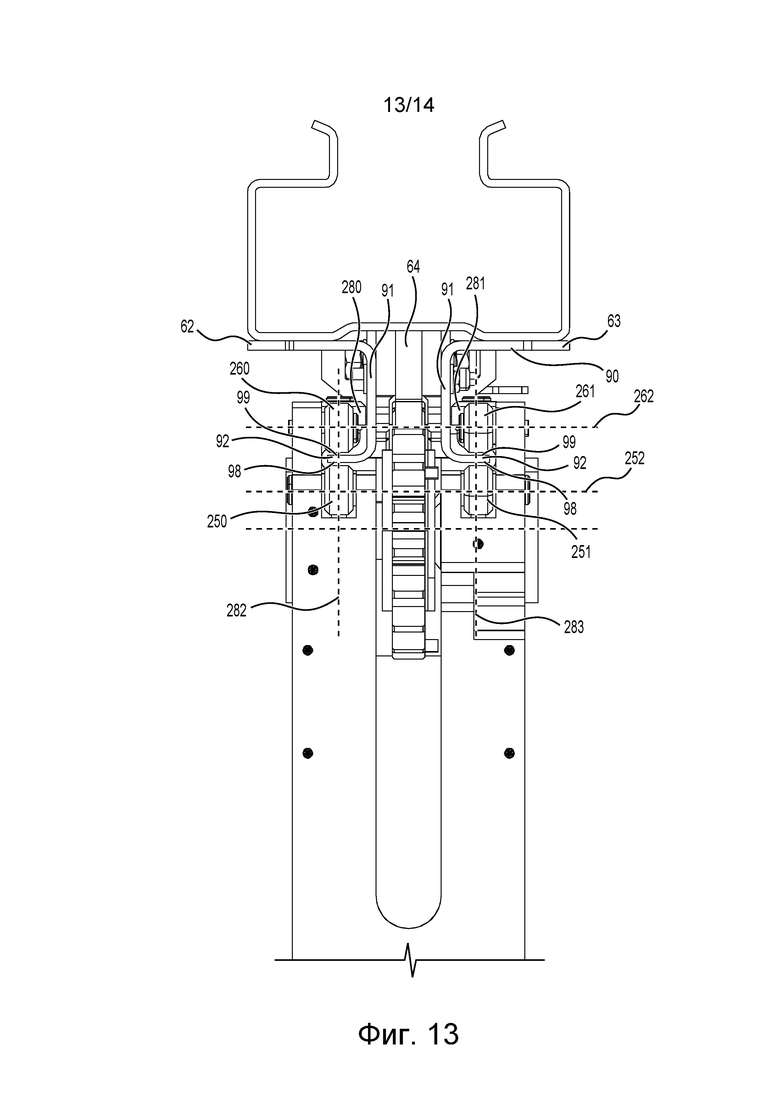
[0045] На фиг. 13 представлен вид в увеличенном масштабе части подъемного узла и направляющей, показанных на фиг. 6, при нахождении подъемного узла в одном положении относительно направляющей, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
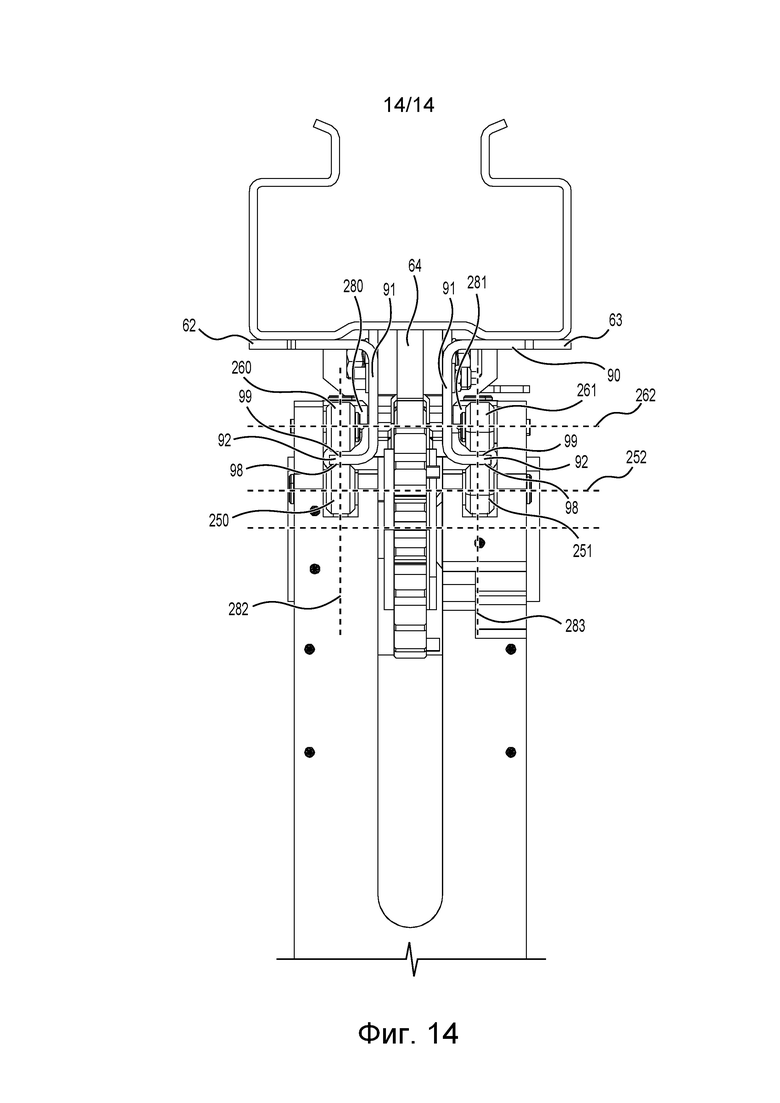
[0046] На фиг. 14 представлен вид в увеличенном масштабе части подъемного узла и направляющей, показанных на фиг. 6, при нахождении подъемного узла в другом положении относительно направляющей, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
Осуществление изобретения
[0047] На фиг. 1 изображены два складских стеллажа 50 (раздельно не обозначены), а также складской робот 100, расположенный между двумя складскими стеллажами 50. В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, складской робот 100 представляет собой робот-инвентаризатор 100, который может использоваться для перемещения различных предметов, хранящихся на складе, из одного места в другое, в частности, с одного из складских стеллажей 50 в место обработки или отгрузки на складе. Такие предметы могут включать в себя, среди прочего, пищевые продукты, промышленные товары, сырье, используемое для производства различных продуктов и изделий, и т.п.
[0048] Для хранения таких предметов на складских стеллажах 50 предусмотрено несколько уровней полок 54 (раздельно не обозначены), опорами которым служат вертикальные направляющие 56 (раздельно не обозначены). В показанном варианте осуществления каждый складской стеллаж 50 имеет три уровня полок 54 и четыре направляющих 56. Предполагается, что в других вариантах осуществления количество уровней полок 54 может быть большим или меньшим трех, а количество направляющих 56 - большим или меньшим четырех.
[0049] Каждая из полок 54 является по существу плоской и расположена по существу горизонтально, что обеспечивает возможность хранения на полках 54 различных предметов. Предметы могут храниться на полках 54 как по отдельности, так и в контейнерах соответствующих размеров, например, на поддонах.
[0050] Ниже со ссылками на фиг. 3-6 приведено подробное описание одной из направляющих 56 складского стеллажа 50. Направляющая 56, по существу симметричная относительно вертикальной центральной плоскости 58, имеет базовую часть 60, боковую часть 62, расположенную с одной стороны от вертикальной центральной плоскости 58, боковую часть 63, расположенную с другой стороны от вертикальной центральной плоскости 58, и зубчатую часть 64, расположенную по существу по центру в вертикальной центральной плоскости 58 между боковыми частями 62, 63. Предполагается, что в некоторых вариантах осуществления базовая часть 60, боковые части 62, 63 и зубчатая часть 64 могут быть выполнены как единое целое.
[0051] Базовая часть 60 имеет передний сегмент 70, боковые сегменты 72, 73, отходящие от переднего сегмента 70 по существу перпендикулярно ему, и задние сегменты 74, 75, отходящие от соответствующих боковых сегментов 72, 73 по существу перпендикулярно им.
[0052] Передний сегмент 70 содержит множество разнесенных по вертикали передних отверстий 80 с одной стороны от вертикальной центральной плоскости 58 и множество разнесенных по вертикали передних отверстий 81 с другой стороны от вертикальной центральной плоскости 58. Каждое из передних отверстий 80, 81 выполнено таким образом, что его верхняя часть шире нижней части. Предполагается, что в других вариантах осуществления передние отверстия 80, 81 могут иметь другую форму без отступления от существа и объема настоящей технологии.
[0053] Каждый из боковых сегментов 72, 73, расположенных на расстоянии друг от друга, содержит множество разнесенных по вертикали боковых отверстий 86, обеспечивающих соединение полок 54 с направляющей 56. Наличие множества боковых отверстий 86 позволяет соединять полки 54 с направляющими 56 в разных положениях.
[0054] Задний сегмент 74 отходит от бокового сегмента 72 по существу перпендикулярно ему, а задний сегмент 75 отходит от бокового сегмента 73 по существу перпендикулярно ему. Каждый из задних сегментов 74, 75 имеет загнутую часть 88. В некоторых вариантах осуществления загнутые части 88 способствуют повышению жесткости направляющей 56. В других вариантах осуществления загнутые части 88 могут использоваться для присоединения к полкам 54. Следует отметить, что задние сегменты 74, 75 не соединены друг с другом. В других вариантах осуществления задние сегменты 74, 75 могут быть соединены друг с другом.
[0055] Боковые части 62, 63, прилегающие к переднему сегменту 70, расположены по обе стороны от вертикальной центральной плоскости 58. Поскольку боковые части 62, 63 по существу являются зеркальными отображениями друг друга, здесь подробно описана лишь боковая часть 62. Боковая часть 62 состоит из опорного сегмента 90, промежуточного сегмента 91 и упорного сегмента 92.
[0056] Опорный сегмент 90, выполненный с возможностью прилегания к переднему сегменту 70 базовой части 60, содержит множество опорных отверстий 94, обеспечивающих установку крепежных элементов 95.
[0057] Промежуточный сегмент 91 отходит от опорного сегмента 90 по существу перпендикулярно ему, вследствие чего промежуточный сегмент 91 расположен по существу параллельно вертикальной центральной плоскости 58. Промежуточный сегмент 91 содержит множество промежуточных отверстий (не показаны), выполненных для размещения в них крепежных элементов 96.
[0058] Упорный сегмент 92 отходит от промежуточного сегмента 91 по существу перпендикулярно ему, вследствие чего упорный сегмент 92 расположен по существу параллельно опорному сегменту 90. Следует отметить, что упорный сегмент 92 короче опорного сегмента 90 в направлении, перпендикулярном вертикальной центральной плоскости 58 (то есть в поперечном направлении). Упорный сегмент 92 имеет переднюю поверхность 98 и заднюю поверхность 99.
[0059] Боковая часть 62 выборочно соединяется с базовой частью 60 с помощью крепежных элементов 95, которые устанавливаются через опорные отверстия 94 и передние отверстия 80. Предполагается, что боковая часть 62 может соединяться с базовой частью 60 иным способом. Например, в некоторых вариантах осуществления крепежные элементы 95 и опорные отверстия 94 могут отсутствовать, а боковая часть 62 может иметь зацепы, способные входить в передние отверстия 80. Следует понимать, что боковая часть 63 соединяется с базовой частью 60 аналогично боковой части 62.
[0060] Зубчатая часть 64 расположена так, что ее задняя поверхность прилегает к переднему сегменту 70 базовой части 60, а ее боковые поверхности - к промежуточным сегментам 91 боковых частей 62, 63. Предполагается, что в некоторых вариантах осуществления задняя поверхность зубчатой части 64 может отстоять от переднего сегмента 60 и удерживаться в этом положении за счет соединения с боковыми частями 62, 63. В показанном варианте осуществления зубчатая часть 64 соединена с базовой частью 60 через боковые части 62, 63. В частности, зубчатая часть 64 соединена с боковыми частями 62, 63 с помощью крепежных элементов 95, проходящих через боковые части 62, 63 и зубчатую часть 64. В показанном варианте осуществления крепежными элементами 95 являются болты и гайки, но возможно использование и других крепежных элементов, например, заклепок. Предполагается, что в других вариантах осуществления зубчатая часть 64 может составлять единое целое с базовой частью 60.
[0061] Ниже со ссылкой на фиг. 2 приведено более подробное описание складского робота 100. Робот-инвентаризатор 100 способен передвигаться между складскими стеллажами 50, образующими проходы на складе, и перемещать один или несколько предметов, хранящихся на полках 54 складских стеллажей 50, в другие места на складе. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии робот-инвентаризатор 100 может содержать сканирующие датчики для сканирования предметов на полках в целях наблюдения и/или для выбора предметов, подлежащих перемещению. Например, робот-инвентаризатор 100 может сканировать предметы, хранящиеся на полках 54, и определять конкретный предмет, который необходимо переместить. Затем робот-инвентаризатор 100 может забирать предмет с полки 54 и перемещать его в нужное место.
[0062] Робот-инвентаризатор 100 содержит нижнюю платформу 102 и верхнюю платформу 104, функционально связанную с нижней платформой 102. В некоторых вариантах осуществления нижняя платформа 102 называется нижним транспортным средством, а верхняя платформа 104 - верхним транспортным средством. На фиг. 1 и 2 робот-инвентаризатор 100 изображен в соединенном состоянии. Как описано ниже, верхняя платформа 104 выполнена с возможностью ее отведения от нижней платформы 102 для перевода робота-инвентаризатора 100 в разъединенное состояние.
[0063] Нижняя платформа 102 имеет нижнюю раму 110 и четыре колесных узла 112 (раздельно не обозначены, на фиг. 2 показаны только два из них). В некоторых вариантах осуществления количество колесных узлов 112 на нижней раме 102 может быть как большим, так и меньшим четырех. В других вариантах осуществления нижняя платформа 102 может быть оснащена другой двигательной системой, например, гусеничной системой. Четыре колесных узла 112 обеспечивают перемещение нижней платформы 102 и, соответственно, робота-инвентаризатора 100 по некоторой обращенной верх поверхности, например, по полу склада.
[0064] Верхняя платформа 104 имеет верхнюю раму 120 и четыре подъемных узла 200 (раздельно не обозначены), более подробное описание которых приведено ниже. В некоторых вариантах осуществления количество подъемных узлов 200 на верхней платформе 104 может быть как большим, так и меньшим четырех. Два из четырех подъемных узлов 200 ориентированы в одном направлении, а два других подъемных узла 200 - в другом направлении. Подъемные узлы 200 расположены таким образом, что при размещении робота-инвентаризатора 100 в проходе, образованном двумя соседними складскими стеллажами 50, каждый из подъемных узлов 200 может взаимодействовать с направляющей 56. Как описано ниже, четыре подъемных узла 200 при одновременном управлении ими могут перемещаться по соответствующим направляющим 56, обеспечивая перемещение верхней платформы 104 по направляющим 56 в вертикальном направлении относительно нижней платформы 102. Более подробное описание верхней и нижней платформ 102, 104 приведено в патентной заявке RU2023121139, поданной 11 августа 2023 года, содержание которой полностью включено в настоящий документ посредством ссылки.
[0065] Ниже со ссылкой на фиг. 8-11 приведено более подробное описание подъемных узлов 200. Поскольку подъемные узлы 200 в целом подобны друг другу, здесь описан лишь один подъемный узел 200.
[0066] Необходимо отметить, что если не оговорено иное, термины, относящиеся к пространственной ориентации при указании подъемного узла 200 и его элементов, такие как «вертикальный», «горизонтальный», «передний», «задний», «левый», «правый», «выше» и «ниже», следует понимать так, что подъемный узел 200 обращен к направляющей 56 и находится в положении зацепления с ней, а направляющая 56 находится перед подъемным узлом 200.
[0067] Подъемный узел 200 содержит подъемную раму 202. Подъемная рама 202 задает продольную центральную плоскость 204, которая делит подъемную раму 202 и, соответственно, подъемный узел 200 на левую и правую стороны. Следует понимать, что левая и правая стороны подъемного узла 200 могут не соответствовать левой и правой сторонам верхней платформы 104.
[0068] С передней стороны подъемной рамы 202 предусмотрены левый кронштейн 210 и правый кронштейн 211. Левый и правый кронштейны 210, 211 симметричны относительно продольной центральной плоскости 204. В связи с этим подробное описание здесь приведено лишь для левого кронштейна 210.
[0069] Кронштейн 210, размещенный на боковой грани подъемной рамы 202, выступает вперед в продольном направлении от передней поверхности 214 подъемной рамы 202. Кронштейн 210 имеет верхнюю часть 216 и нижнюю часть 218. Верхняя часть 218 скошена вниз. Как более подробно описано ниже, кронштейн 210 выполнен с возможностью присоединения к нему роликов.
[0070] Подъемная рама 202 имеет центральное углубление 220, по существу расположенное в продольной центральной плоскости 204. Центральное углубление 220 расположено вдоль части длины подъемной рамы 202 по всей высоте подъемной рамы 202. Центральное углубление 220 предназначено для размещения в нем части зубчатого колеса 230.
[0071] Подъемная рама 202 дополнительно имеет боковое отверстие 222 (фиг. 8), предназначенное для размещения в нем приводного элемента. В данном варианте осуществления приводным элементом является двигатель 236. Опорой двигателю 236 (фиг. 2) служит верхняя рама 120.
[0072] Как показано на фиг. 8-11, подъемный узел 200 также содержит зубчатое колесо 230, соединенное с возможностью его вращения с подъемной рамой 202. В частности, зубчатое колесо 230 выполнено с возможностью его вращения относительно подъемной рамы 202 вокруг оси 232 зубчатого колеса, по существу перпендикулярной продольной центральной плоскости 204. Зубчатое колесо 230 размещено в центральном углублении 220 с передней стороны подъемной рамы 202 таким образом, что часть зубчатого колеса 230 выступает в продольном направлении за переднюю поверхность 214. Как более подробно описано ниже, зубчатое колесо 230 способно взаимодействовать с зубчатой частью 64 направляющей 56. Зубчатое колесо 230 также функционально связано с двигателем 236 и за счет этого поворачивается вокруг оси 232 зубчатого колеса под действием двигателя 236. Предполагается, что в других вариантах осуществления вместо зубчатого колеса 230 может использоваться узел со звездочкой и/или узел цепной передачи со звездочкой.
[0073] Подъемный узел 200 также содержит центрирующий элемент 240, присоединенный к подъемной раме 202 в ее передней нижней части. Центрирующий элемент 240 имеет центрирующую часть 242, которая по существу находится в продольной центральной плоскости 204 и, соответственно, по существу расположена в одной плоскости с зубчатым колесом 230. Как описано ниже, центрирующий элемент 240 способствует центрированию подъемного узла 200 относительно направляющей 56.
[0074] Подъемный узел 200 содержит левый верхний продольный ролик 250, левый промежуточный продольный ролик 260, левый нижний продольный ролик 270 и левый поперечный ролик 280, которые размещены с левой стороны. Подобным образом, подъемный узел 200 содержит правый верхний продольный ролик 251, правый промежуточный продольный ролик 261, правый нижний продольный ролик 271 и правый поперечный ролик 281, которые размещены с правой стороны. Левый и правый верхние продольные ролики 250, 251, левый и правый промежуточные продольные ролики 260, 261, левый и правый нижние продольные ролики 270, 271 и левый и правый поперечные ролики 280, 281 соединены с возможностью их вращения с подъемной рамой 202.
[0075] Левый и правый верхние продольные ролики 250, 251 выполнены с возможностью их вращения относительно подъемной рамы 202 вокруг верхней оси 252, которая по существу параллельна оси 232 зубчатого колеса. Таким образом, верхняя ось 252 также по существу перпендикулярна продольной центральной плоскости 204. Верхняя ось 252 разнесена по вертикали с осью 232 зубчатого колеса. В частности, верхняя ось 252 расположена выше оси 232 зубчатого колеса. Верхняя ось 252 также разнесена с осью 232 зубчатого колеса в продольном направлении. В частности, верхняя ось 252 расположена впереди оси 232 зубчатого колеса в продольном направлении.
[0076] Левый и правый промежуточные продольные ролики 260, 261 выполнены с возможностью их вращения относительно подъемной рамы 202 вокруг промежуточной оси 262, параллельной оси 232 зубчатого колеса и верхней оси 252. В показанном варианте осуществления промежуточная ось 262 разнесена по вертикали с верхней осью 252. В частности, промежуточная ось 262 расположена по вертикали ниже верхней оси 252. В некоторых вариантах осуществления расстояние по вертикали между промежуточной осью 262 и верхней осью 252 меньше радиуса R зубчатого колеса 230. В некоторых вариантах осуществления промежуточная ось 262 может располагаться по вертикали выше верхней оси 252. Промежуточная ось 262 по существу совпадает по вертикали с осью 232 зубчатого колеса. Предполагается, что в других вариантах осуществления промежуточная ось 262 может быть разнесена по вертикали с осью 232 зубчатого колеса на расстояние, меньшее радиуса R зубчатого колеса 230. Кроме того, промежуточная ось 262 разнесена с осью 232 зубчатого колеса и с верхней осью 252 в продольном направлении. В частности, промежуточная ось 262 расположена впереди оси 232 зубчатого колеса и верхней оси 252 в продольном направлении. В данном варианте осуществления продольное расстояние между промежуточной осью 262 и верхней осью 252 меньше продольного расстояния между промежуточной осью 262 и осью 232 зубчатого колеса. В других вариантах осуществления промежуточная ось 262 может быть расположена в продольном направлении между осью 232 зубчатого колеса и верхней осью 252.
[0077] Левый и правый нижние продольные ролики 270, 271 выполнены с возможностью их вращения относительно подъемной рамы 202 вокруг нижней оси 272, параллельной оси 232 зубчатого колеса, верхней оси 252 и промежуточной оси 262. В показанном варианте осуществления нижняя ось 272 разнесена по вертикали с осью 232 зубчатого колеса, с верхней осью 252 и с промежуточной осью 262. В частности, нижняя ось 272 расположена ниже оси 232 зубчатого колеса, верхней оси 252 и промежуточной оси 262. При этом следует отметить, что нижняя ось 272 расположена выше самой нижней точки зубчатого колеса 230. Таким образом, расстояние по вертикали между нижней осью 272 и осью 232 зубчатого колеса меньше радиуса R зубчатого колеса 230. В некоторых вариантах осуществления расстояние по вертикали между нижней осью 272 и осью 232 зубчатого колеса может быть равным радиусу R зубчатого колеса 230 или превышать его. Кроме того, нижняя ось 272 совпадает в продольном направлении с верхней осью 252 и разнесена в продольном направлении с осью 232 зубчатого колеса и с промежуточной осью 262. Нижняя ось 272, как и верхняя ось 252, ближе к оси 232 зубчатого колеса в продольном направлении, чем промежуточная ось 262.
[0078] Как показано на фиг. 12, ось 232 зубчатого колеса отстоит на расстояние D1 от верхней оси 252 и на расстояние D2 от нижней оси 272. В данном варианте осуществления расстояние D1 равно расстоянию D2. В других вариантах осуществления расстояние D1 может быть большим или меньшим расстояния D2. Ось 232 зубчатого колеса отстоит от промежуточной оси 262 на расстояние D3. Расстояние D3 превышает расстояния D1 и D2. При этом расстояние D3 меньше радиуса R зубчатого колеса 230. Промежуточная ось 262 отстоит на расстояние D4 от верхней оси 252 и на расстояние D5 от нижней оси 272. В данном варианте осуществления расстояние D4 равно расстоянию D5. В других вариантах осуществления расстояние D4 может быть большим или меньшим расстояния D5. Кроме того, нижняя ось 272 отстоит от верхней оси 252 на расстояние D6. Расстояние D6 меньше диаметра зубчатого колеса 230. В данной конфигурации расстояние D4 меньше расстояния D3.
[0079] Левый поперечный ролик 280 выполнен с возможностью его вращения относительно подъемной рамы вокруг оси 282. Ось 282 по существу параллельна продольной центральной плоскости 204 и, соответственно, по существу перпендикулярна оси 232 зубчатого колеса, а также верхней, промежуточной и нижней осям 252, 262, 272. В данном варианте осуществления ось 282 по вертикали расположена между промежуточной и нижней осями 262, 272, но возможны и другие положения.
[0080] Правый поперечный ролик 281 выполнен с возможностью его вращения относительно подъемной рамы вокруг оси 283. Ось 283 по существу параллельна продольной центральной плоскости 204 и оси 282 и, соответственно, по существу перпендикулярна оси 232 зубчатого колеса, а также верхней, промежуточной и нижней осям 252, 262, 272. В данном варианте осуществления ось 283 совпадает по вертикали с осью 282 и, соответственно, также расположена между промежуточной и нижней осями 262, 272, но возможны и другие положения.
[0081] Левый и правый верхние продольные ролики 250, 251, левый и правый промежуточные продольные ролики 260, 261, левый и правый нижние продольные ролики 270, 271 и левый и правый поперечные ролики 280, 281 расположены симметрично относительно продольной центральной плоскости 204. В связи с этим подробное описание здесь приведено лишь для роликов, расположенных с левой стороны подъемной рамы 202. Далее левые верхний, промежуточный и нижний продольные ролики 250, 260, 270 и левый поперечный ролик 280 называются просто верхним, промежуточным и нижним продольными роликами 250, 260, 270 и поперечным роликом 280.
[0082] Верхний продольный ролик 250 соединен с возможностью его вращения с подъемной рамой 202 в передней верхней части. Верхний продольный ролик 250, расположенный сбоку между зубчатым колесом 230 и кронштейном 210, размещен таким образом, что его часть выступает в продольном направлении за переднюю поверхность 214. Как более подробно описано ниже, когда подъемный узел 200 взаимодействует с одной из направляющих 56, верхний продольный ролик 250 способен упираться в переднюю поверхность 98 упорного сегмента 92 одной из направляющих 56.
[0083] Промежуточный продольный ролик 260 соединен с возможностью его вращения с кронштейном 210. Промежуточный продольный ролик 260 выровнен с верхним продольным роликом 250 в поперечном направлении и разнесен с ним в продольном направлении. В частности, промежуточный продольный ролик 260 расположен впереди верхнего продольного ролика 250 в продольном направлении. Как более подробно описано ниже, продольное расстояние между верхним и промежуточным продольными роликами 250, 260 выбрано таким образом, чтобы между ними можно было разместить упорный сегмент 92. Как указано выше, промежуточный продольный ролик 260 также расположен по вертикали ниже верхнего продольного ролика 250. Как более подробно описано ниже, когда подъемный узел 200 взаимодействует с одной из направляющих 56, промежуточный продольный ролик 260 способен упираться в заднюю поверхность 99 упорного сегмента 92 одной из направляющих 56.
[0084] Нижний продольный ролик 270 (как наиболее наглядно показано на фиг. 9) соединен с возможностью его вращения с подъемной рамой 202 в передней нижней части. Нижний продольный ролик 270 расположен сбоку между зубчатым колесом 230 и кронштейном 210. В частности, нижний продольный ролик 270 выровнен с верхним продольным роликом 250 в поперечном направлении. Нижний продольный ролик 270 размещен таким образом, что его часть выступает в продольном направлении за переднюю поверхность 214. Как более подробно описано ниже, когда подъемный узел 200 взаимодействует с одной из направляющих 56, нижний продольный ролик 270 способен упираться в переднюю поверхность 98 упорного сегмента 92 одной из направляющих 56.
[0085] Поперечный ролик 280 также соединен с возможностью его вращения с подъемной рамой 202. Поперечный ролик 280 соединен с нижней частью 218 кронштейна 210. Поперечный ролик 280 размещен таким образом, что его часть выступает в поперечном направлении за боковую поверхность 219 нижней части 218. Как более подробно описано ниже, когда подъемный узел 200 взаимодействует с одной из направляющих 56, поперечный ролик 280 способен упираться в промежуточный сегмент 91 одной из направляющих 56.
[0086] Ниже со ссылкой на фиг. 1, 3, 6 7, 13 и 14 приведено описание принципа работы подъемного узла 200. Когда необходимо переместить по меньшей мере часть складского робота 100 в вертикальном направлении (например, для получения доступа к полке 54 третьего уровня), складской робот 100 передвигается, используя колесные узлы 112, до тех пор, пока каждый из подъемных узлов 200 не окажется выровненным с соответствующей направляющей 56. Два подъемных узла 200 выравниваются с направляющими 56 одного складского стеллажа 50, а два других подъемных узла - с направляющими 56 другого складского стеллажа 50. Затем подъемные узлы 200 приводятся в действие, чтобы отвести верхнюю платформу 104 от нижней платформы 200 в вертикальном направлении. В некоторых вариантах осуществления подъемные узлы 200 способны обеспечивать перемещение в вертикальном направлении складского робота 100 в целом.
[0087] Ниже приведено более подробное описание взаимодействия подъемных узлов 200 с направляющими 56. Поскольку все подъемные узлы 200 взаимодействуют с направляющими 56 подобным образом, здесь описано взаимодействие лишь одного подъемного узла 100 с соответствующей направляющей 56.
[0088] Сначала, как указано выше, подъемный узел 200 функционально выравнивается с направляющей 56. В некоторых случаях подъемный узел 200 считается функционально выровненным с направляющей 56, когда продольная центральная плоскость 204 подъемной рамы 202 выровнена с вертикальной центральной плоскостью 58 направляющей 56. Когда подъемный узел 200 функционально выровнен с направляющей 56, зубчатое колесо 230 выравнивается с зубчатой частью 64 и взаимодействует с ней. Кроме того, как показано на фиг. 13, когда подъемный узел 200 функционально выровнен с направляющей 56, упорный сегмент 92 расположен между верхним и промежуточным роликами 250, 260, а упорный сегмент 93 - между верхним и промежуточным роликами 251, 261. Иными словами, продольное расстояние между верхней осью 252 и промежуточной осью 262, а также размеры роликов 250, 251, 260, 261 выполнены такими, чтобы упорные сегменты 92, 93 могли быть размещены между соответствующими роликами 250, 251, 260, 261, но не обязательно впритык к роликам 250, 251, 260, 261. Благодаря этому облегчается функциональное выравнивание подъемного узла 200 с направляющей 56. Зубчатое колесо 230 поворачивается вокруг оси 232 зубчатого колеса под действием двигателя 236. Приводное взаимодействие между зубчатым колесом 230 и направляющей 56 обеспечивает перемещение подъемного узла 200 в вертикальном направлении.
[0089] Следует отметить, что в конфигурации, показанной на фиг. 13, ролики 250 и 260 разнесены друг от друга настолько, что функциональное выравнивание упорного сегмента 92 с роликами 250 и 260 обеспечивается не только при его физическом контакте с роликами 250 и 260. При этом ролики 251 и 261 так же разнесены друг от друга настолько, что функциональное выравнивание другого упорного сегмента 92 с роликами 251 и 261 обеспечивается не только при его физическом контакте с роликами 251 и 261.
[0090] В итоге по мере перемещения подъемного узла 200 вдоль направляющей 56 упорный сегмент 92 боковой части 62 оказывается между верхним и промежуточным продольными роликами 250, 260. При этом упорный сегмент 92 боковой части 63 подобным же образом оказывается между верхним и промежуточным продольными роликами 251, 261. Как показано на фиг. 7, по мере продвижения подъемного узла 200 в вертикальном направлении промежуточный ролик 260, благодаря взаимодействию между зубчатым колесом 230 и направляющей 56, упирается в заднюю поверхность 99 упорного сегмента 92, а промежуточный ролик 261 - в заднюю поверхность 99 упорного сегмента 93. Таким образом, промежуточные ролики 260, 261 помогают поддерживать подъемный узел 200 в состоянии функционального выравнивания с направляющей 56.
[0091] Если один или несколько подъемных узлов 200 во время работы сталкиваются с препятствием, один из подъемных узлов 200 может оказываться выше других подъемных узлов 200. В некоторых случаях, как показано на фиг. 14, движение подъемного узла 200 приводит к отходу промежуточных роликов 260, 261 от задней поверхности 99 соответствующих упоров 92, 93, в результате чего один или несколько верхних и нижних роликов 250, 251, 270, 271 могут упираться в переднюю поверхность 98 соответствующих упоров 92, 93, что способствует сохранению функционального выравнивания между подъемным узлом 200 и направляющей 56. В таких случаях расположение верхних и нижних продольных роликов 250, 251, 270, 271 помогает им принимать на себя нагрузку, которая в противном случае прикладывалась бы к зубчатому колесу 230.
[0092] Следует отметить, что в конфигурации, показанной на фиг. 14, в отличие от конфигураций, показанных на фиг. 6 и 13, ролики 250 и 251 находятся в физическом контакте с упорными сегментами 92 (например, упираются в них). Предполагается, что в по меньшей мере некоторых вариантах осуществления настоящей технологии функциональное выравнивание упорных сегментов 92 с подъемным узлом 200 не обязательно означает наличие физического контакта между роликами 250, 251, 260, 261 и упорными сегментами 92 (см. фиг. 13). В некоторых случаях в физическом контакте с упорными сегментами 92 во время работы подъемного узла 200 находятся ролики 260 и 261 (см. фиг. 6). Например, ролики 260 и 261 могут находиться в физическом контакте с упорными сегментами 92, когда подъемный узел 200 движется вверх и/или вниз, используя направляющую 56, как указано выше. В других случаях в физическом контакте с упорными сегментами 92 во время работы подъемного узла 200 находятся ролики 250 и 251 (см. фиг. 14). Например, ролики 250 и 251 могут находиться в физическом контакте с упорными сегментами 92, когда подъемный узел 200 движется вверх и/или вниз, используя направляющую 56, как указано выше.
[0093] Такое расположение верхних, промежуточных и нижних продольных роликов 250, 251, 260, 261, 270, 271 способствует снижению нагрузок, действующих на зубчатое колесо 230. Действительно, из-за груза, удерживаемого подъемным узлом 200, зубчатое колесо 230 подвергается воздействию различных сил, что может вызывать износ зубчатого колеса 230. Часть нагрузки приходится на верхние и промежуточные продольные ролики 250, 251, 260, 261, поскольку они соединены с подъемной рамой 202 выше оси 232 зубчатого колеса и расположены с каждой из продольных сторон упорного сегмента 92. Нижние продольные ролики 270, 271 также способствуют снижению нагрузок, действующих на зубчатое колесо 230, и в то же время исключают трение нижней части подъемной рамы 202 о направляющую 56.
[0094] Кроме того, поперечный ролик 280 упирается в промежуточный сегмент 91 боковой части 62, а поперечный ролик 281 - в промежуточный сегмент 91 боковой части 63. В некоторых случаях поперечные ролики 280, 281 могут располагаться вблизи соответствующих промежуточных сегментов 91, но не упираться в них. При приложении силы, способной вызвать боковое смещение подъемного узла 200 (то есть нарушение функционального выравнивания между подъемным узлом 200 и направляющей 56), один из поперечных роликов 280, 281 упирается в промежуточный сегмент 91 соответствующей боковой части (боковой части 62 или боковой части 63), не позволяя упираться в эту боковую часть какому-либо из верхних, промежуточных и нижних продольных роликов 250, 251, 260, 261, 270, 271, благодаря чему предотвращается смещение подъемного узла 200 в боковом направлении (и, соответственно, нарушение функционального выравнивания) и уменьшается преждевременный износ верхних, промежуточных и нижних продольных роликов 250, 251, 260, 261, 270, 271.
[0095] Для специалиста в данной области могут быть очевидными возможные изменения и усовершенствования описанных выше вариантов осуществления настоящей технологии. Предшествующее описание приведено лишь в иллюстративных целях, а не для ограничения объема изобретения. Объем охраны настоящей технологии определяется исключительно объемом приложенной формулы изобретения.
Подъемный узел содержит подъемную раму, имеющую продольную центральную плоскость, зубчатое колесо, способное взаимодействовать с направляющей и способное вращаться вокруг оси зубчатого колеса, а также первый, второй и третий ролики, способные вращаться вокруг осей первого, второго и третьего роликов, соответственно. Ось зубчатого колеса, перпендикулярная продольной центральной плоскости, параллельна осям первого и второго роликов. Расстояние по вертикали между осью зубчатого колеса и осью второго ролика меньше радиуса зубчатого колеса. Ось третьего ролика параллельна продольной центральной плоскости. При взаимодействии подъемного узла с направляющей первый и второй ролики способны охватывать первый сегмент направляющей с двух сторон, ограничивая продольное перемещение подъемной рамы, а третий ролик способен упираться во второй сегмент направляющей, ограничивая поперечное перемещение подъемной рамы. 3 н. и 17 з.п. ф-лы, 14 ил.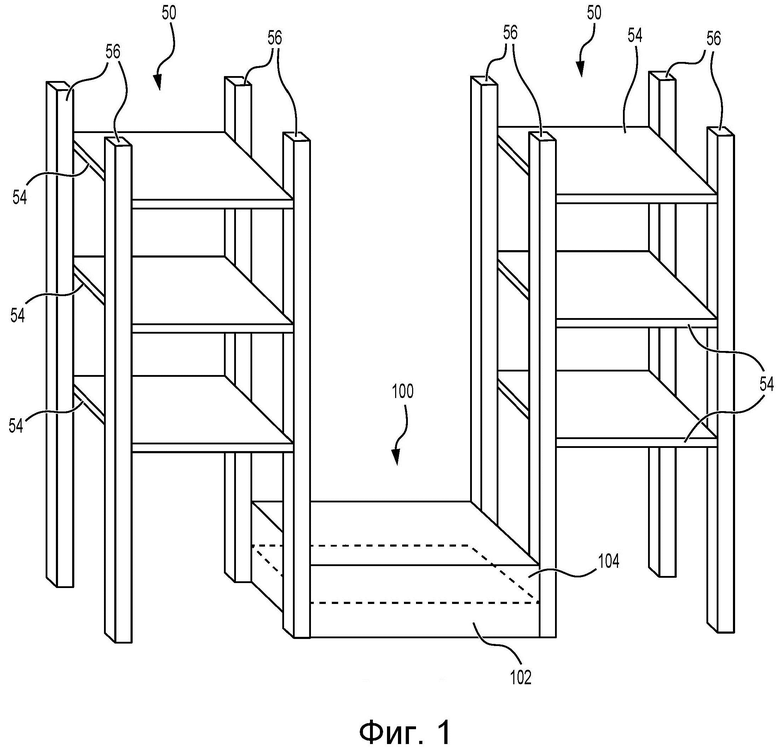
1. Подъемный узел для складского робота, содержащий:
- подъемную раму, имеющую продольную центральную плоскость;
- зубчатое колесо, соединенное с возможностью его вращения с подъемной рамой, функционально связанное с двигателем, способное вращаться вокруг оси зубчатого колеса, по существу перпендикулярной продольной центральной плоскости, и способное взаимодействовать с направляющей для обеспечения приводного усилия;
- первый ролик, соединенный с возможностью его вращения с подъемной рамой, расположенный сбоку на расстоянии от зубчатого колеса, способный вращаться вокруг оси первого ролика, по существу параллельной оси зубчатого колеса, и способный упираться в переднюю поверхность первого сегмента направляющей;
- второй ролик, соединенный с возможностью его вращения с подъемной рамой, разнесенный с первым роликом в продольном направлении и по вертикали, способный вращаться вокруг оси второго ролика, по существу параллельной оси первого ролика, с меньшим расстоянием по вертикали между осью второго ролика и осью зубчатого колеса, чем радиус зубчатого колеса, и способный упираться в заднюю поверхность первого сегмента направляющей;
- третий ролик, соединенный с возможностью его вращения с подъемной рамой, расположенный сбоку на расстоянии от зубчатого колеса, способный вращаться вокруг оси третьего ролика, по существу параллельной продольной центральной плоскости, и способный упираться во второй сегмент направляющей, соединенный с первым сегментом,
причем при взаимодействии подъемного узла с направляющей первый и второй ролики способны охватывать первый сегмент с двух сторон, ограничивая перемещение подъемной рамы в продольном направлении, а третий ролик способен упираться во второй сегмент, ограничивая перемещение подъемной рамы в поперечном направлении.
2. Подъемный узел по п. 1, в котором рама содержит кронштейн, а первый, второй и/или третий ролики соединены с возможностью их вращения с кронштейном.
3. Подъемный узел по п. 1, в котором ось второго ролика расположена по вертикали ниже оси первого ролика.
4. Подъемный узел по п. 3, в котором ось второго ролика по существу расположена по вертикали выше оси зубчатого колеса.
5. Подъемный узел по п. 1, в котором ось третьего ролика расположена по вертикали ниже оси первого ролика и/или оси второго ролика.
6. Подъемный узел по п. 1, в котором расстояние между осью зубчатого колеса и осью первого ролика меньше расстояния между осью первого ролика и осью второго ролика.
7. Подъемный узел по п. 1, в котором расстояние между осью зубчатого колеса и осью первого ролика меньше расстояния между осью зубчатого колеса и осью второго ролика.
8. Подъемный узел по п. 1, в котором расстояние между осью зубчатого колеса и осью первого ролика меньше радиуса зубчатого колеса.
9. Подъемный узел по п. 1, в котором второй ролик выровнен с первым роликом в поперечном направлении.
10. Подъемный узел по п. 1, который дополнительно содержит четвертый ролик, соединенный с возможностью его вращения с подъемной рамой, расположенный сбоку на расстоянии от зубчатого колеса и способный вращаться вокруг оси четвертого ролика, по существу параллельной оси зубчатого колеса и расположенной по вертикали ниже оси зубчатого колеса.
11. Подъемный узел по п. 10, в котором расстояние между осью четвертого ролика и осью первого ролика меньше диаметра зубчатого колеса.
12. Подъемный узел по п. 10, в котором расстояние между осью зубчатого колеса и осью четвертого ролика равно расстоянию между осью зубчатого колеса и осью первого ролика.
13. Подъемный узел по п. 10, в котором расстояние между осью зубчатого колеса и осью четвертого ролика меньше радиуса зубчатого колеса.
14. Подъемный узел по п. 1, в котором первый сегмент по существу перпендикулярен продольной центральной плоскости.
15. Подъемный узел по п. 1, в котором второй сегмент по существу перпендикулярен первому сегменту.
16. Подъемный узел по п. 1, который дополнительно содержит центрирующий элемент, обеспечивающий центрирование зубчатого колеса относительно направляющей.
17. Подъемный узел по п. 1, в котором продольная центральная плоскость задает первую боковую сторону и вторую боковую сторону, причем на первой боковой стороне размещены первый, второй и третий ролики, и который дополнительно содержит:
- четвертый ролик, соединенный с возможностью его вращения с подъемной рамой, расположенный сбоку на расстоянии от зубчатого колеса на второй боковой стороне, выровненный по оси первого ролика и способный вращаться вокруг нее, а также способный упираться в переднюю поверхность третьего сегмента направляющей, расположенного сбоку на расстоянии от переднего сегмента;
- пятый ролик, соединенный с возможностью его вращения с подъемной рамой, разнесенный с четвертым роликом в продольном направлении и по вертикали, размещенный на второй боковой стороне, выровненный по оси второго ролика и способный вращаться вокруг нее, а также способный упираться в заднюю поверхность третьего сегмента направляющей; и
- шестой ролик, соединенный с возможностью его вращения с подъемной рамой, расположенный сбоку на расстоянии от зубчатого колеса на второй боковой стороне, способный вращаться вокруг оси шестого ролика, по существу параллельной продольной центральной плоскости, и способный упираться в четвертый сегмент направляющей, соединенный с третьим сегментом.
18. Подъемный узел по п. 17, который дополнительно содержит:
- седьмой ролик, соединенный с возможностью его вращения с подъемной рамой, расположенный сбоку на расстоянии от зубчатого колеса на первой стороне, способный вращаться вокруг оси седьмого ролика, по существу параллельной оси зубчатого колеса, и расположенный по вертикали ниже оси зубчатого колеса; и
- восьмой ролик, соединенный с возможностью его вращения с подъемной рамой, расположенный сбоку на расстоянии от зубчатого колеса на второй стороне, способный вращаться вокруг оси седьмого ролика и расположенный по вертикали ниже оси зубчатого колеса.
19. Платформа для складского робота, содержащая раму платформы и один или несколько подъемных узлов, соединенных с рамой платформы и содержащих:
- подъемную раму, имеющую продольную центральную плоскость;
- зубчатое колесо, соединенное с возможностью его вращения с подъемной рамой, функционально связанное с двигателем, способное вращаться вокруг оси зубчатого колеса, по существу перпендикулярной продольной центральной плоскости, и способное взаимодействовать с направляющей для обеспечения приводного усилия;
- первый ролик, соединенный с возможностью его вращения с подъемной рамой, расположенный сбоку на расстоянии от зубчатого колеса, способный вращаться вокруг оси первого ролика, по существу параллельной оси зубчатого колеса, и способный упираться в переднюю поверхность первого сегмента направляющей;
- второй ролик, соединенный с возможностью его вращения с подъемной рамой, выровненный с первым роликом в поперечном направлении и разнесенный с ним в продольном направлении и по вертикали, способный вращаться вокруг оси второго ролика, по существу параллельной оси первого ролика, с меньшим расстоянием между осью второго ролика и осью зубчатого колеса, чем радиус зубчатого колеса, и способный упираться в заднюю поверхность первого сегмента направляющей;
- третий ролик, соединенный с возможностью его вращения с подъемной рамой, расположенный сбоку на расстоянии от зубчатого колеса, способный вращаться вокруг оси третьего ролика, по существу параллельной продольной центральной плоскости, и способный упираться во второй сегмент направляющей, соединенный с первым сегментом,
причем при взаимодействии подъемного узла с направляющей первый и второй ролики способны охватывать первый сегмент с двух сторон, ограничивая перемещение подъемной рамы в продольном направлении, а третий ролик способен упираться во второй сегмент, ограничивая перемещение подъемной рамы в поперечном направлении.
20. Складской робот, содержащий первую платформу, способную перемещаться относительно пола и имеющую первую раму и один или несколько узлов перемещения, соединенных с первой рамой, вторую платформу, функционально связанную с первой платформой и имеющую вторую раму и один или несколько подъемных узлов, соединенных со второй рамой, и содержащих:
- подъемную раму, имеющую продольную центральную плоскость;
- зубчатое колесо, соединенное с возможностью его вращения с подъемной рамой, функционально связанное с двигателем, способное вращаться вокруг оси зубчатого колеса, по существу перпендикулярной продольной центральной плоскости, и способное взаимодействовать с направляющей для обеспечения приводного усилия;
- первый ролик, соединенный с возможностью его вращения с подъемной рамой, расположенный сбоку на расстоянии от зубчатого колеса, способный вращаться вокруг оси первого ролика, по существу параллельной оси зубчатого колеса, и способный упираться в переднюю поверхность первого сегмента направляющей;
- второй ролик, соединенный с возможностью его вращения с подъемной рамой, разнесенный с первым роликом в продольном направлении и по вертикали, способный вращаться вокруг оси второго ролика, по существу параллельной оси первого ролика, с меньшим расстоянием между осью второго ролика и осью зубчатого колеса, чем радиус зубчатого колеса, и способный упираться в заднюю поверхность первого сегмента направляющей;
- третий ролик, соединенный с возможностью его вращения с подъемной рамой, расположенный сбоку на расстоянии от зубчатого колеса, способный вращаться вокруг оси третьего ролика, по существу параллельной продольной центральной плоскости, и способный упираться во второй сегмент направляющей, соединенный с первым сегментом,
причем при взаимодействии подъемного узла с направляющей первый и второй ролики способны охватывать первый сегмент с двух сторон, ограничивая перемещение подъемной рамы в продольном направлении, а третий ролик способен упираться во второй сегмент, ограничивая перемещение подъемной рамы в поперечном направлении.
| CN 115367358 A, 22.11.2022 | |||
| US 20200180863 A1, 11.06.2020 | |||
| US 20220212867 A1, 07.07.2022 | |||
| CN 111761589 A, 13.10.2020 | |||
| US 20170313514 A1, 02.11.2017. |

