Область техники, к которой относится изобретение
[001] Настоящая технология в целом относится к роботизированным системам, оснащенным позиционерами платформ, и к роботизированным транспортным средствам, оснащенным позиционерами платформ.
Уровень техники
[002] Роботизированные транспортные средства широко используются в ряде отраслей для различных целей, в частности, для визуального осмотра и транспортировки различных предметов. Например, в некоторых случаях роботизированные транспортные средства используются для перемещения предметов, хранящихся на складе.
[003] Одни роботизированные транспортные средства программируются на движение по заданным маршрутам или на использование указателей для навигации в складском пространстве. Другие роботизированные транспортные средства оснащаются дополнительными системами для «автономной» адаптации к изменениям планировки складского пространства или к возникающим в реальном времени препятствиям, что повышает их общую эффективность и безопасность при организации складской логистики.
[004] В некоторых случаях такие роботизированные транспортные средства оснащены нижней платформой, способной горизонтально перемещаться по полу склада, и верхней платформой, способной вертикально перемещаться относительно нижней платформы. В некоторых традиционных роботизированных транспортных средствах верхняя и нижняя платформы могут оказаться смещенными друг относительно друга, что создает трудности.
[005] В известных технических решениях был предложен ряд способов для решения вышеуказанной технической проблемы.
[006] В патенте CN105172937 «Automated Guided Vehicle Having Lifting Device and Shelf», выданном 25 сентября 2018 года (правообладатель Chengdu Siwi High Tech Industrial Park Co Ltd), раскрыто автоматически управляемое транспортное средство, оснащенное подъемным устройством и полкой.
[007] В патенте CN109941659 «Robot and goods shelf alignment method and system», выданном 9 февраля 2021 года (правообладатель Shanghai Mumu Jucong Robot Technology Co Ltd), раскрыты способ и система для выравнивания робота относительно полки.
Раскрытие изобретения
[008] Целью настоящей технологии является устранение по меньшей мере части недостатков известных технических решений.
[009] В соответствии с широким аспектом настоящей технологии реализована роботизированная система для работы на складе с полом. Роботизированная система включает в себя первую и вторую платформы. Первая платформа, способная перемещаться относительно пола, содержит первую раму, которая определяет вертикальную плоскость, проходящую через два противоположных углам первой рамы, первый и второй позиционеры, размещенные на двух противоположных углах первой рамы в вертикальной плоскости, и первый набор электрических соединителей, размещенных на верхней поверхности первой рамы. Вторая платформа, функционально связанная с первой платформой, содержит вторую раму, третий и четвертый позиционеры и второй набор электрических соединителей. Вторая рама способна перемещаться относительно первой рамы в вертикальном направлении. Третий и четвертый позиционеры размещены на второй раме в вертикальной плоскости. Каждый из третьего и четвертого позиционеров способен выборочно взаимодействовать с каждым из первого и второго позиционеров. Второй набор электрических соединителей размещен на нижней поверхности второй рамы. Когда третий позиционер взаимодействует с одним из первого и второго позиционеров, а четвертый позиционер взаимодействует с другим из первого и второго позиционеров, обеспечивается электрическое соединение первого набора электрических соединителей со вторым набором электрических соединителей.
[010] В некоторых вариантах осуществления первый набор электрических соединителей включает в себя первый электрический соединитель, размещенный с одной стороны вертикальной плоскости, второй электрический соединитель, расположенный в вертикальной плоскости, и третий электрический соединитель, размещенный с другой стороны вертикальной плоскости. Второй набор электрических соединителей включает в себя четвертый электрический соединитель и пятый электрический соединитель. Когда третий позиционер взаимодействует с первым позиционером, а четвертый позиционер взаимодействует со вторым позиционером, четвертый электрический соединитель электрически соединяется со вторым электрическим соединителем, а пятый электрический соединитель соединяется с одним из первого и третьего электрических соединителей. Когда третий позиционер взаимодействует со вторым позиционером, а четвертый позиционер взаимодействует с первым позиционером, четвертый электрический соединитель электрически соединяется со вторым электрическим соединителем, а пятый электрический соединитель соединяется с другим из первого и третьего электрических соединителей.
[011] В некоторых вариантах осуществления второй электрический соединитель имеет отрицательную или положительную полярность, противоположную полярности первого и третьего электрических соединителей, а четвертый электрический соединитель имеет отрицательную или положительную полярность, противоположную полярности пятого электрического соединителя.
[012] В некоторых вариантах осуществления первый и второй позиционеры представляют собой позиционирующее углубление или позиционирующий выступ, а третий и четвертый позиционеры представляют собой, соответственно, позиционирующий выступ или позиционирующее углубление.
[013] В некоторых вариантах осуществления роботизированная система дополнительно содержит фиксирующий узел, соединенный с одной из первой и второй рам, имеющей позиционирующие углубления. Фиксирующий узел содержит штифт и поджимающий элемент. Штифт способен перемещаться между первым положением, в котором часть штифта введена в позиционирующее углубление, и вторым положением, в котором эта часть штифта по меньшей мере частично выведена из позиционирующего углубления. Поджимающий элемент поджимает штифт в направлении первого положения.
[014] В некоторых вариантах осуществления позиционирующие выступы имеют по существу цилиндрическую форму, а каждое из позиционирующих углублений включает в себя первый участок, верхняя часть которого шире его нижней части, и второй участок, расположенный под первым участком и имеющий размеры, обеспечивающие размещение в нем по меньшей мере части позиционирующего выступа.
[015] В некоторых вариантах осуществления позиционирующие выступы и позиционирующие углубления выполнены так, чтобы позиционирующие выступы входили с зазором в позиционирующие углубления на втором участке.
[016] В некоторых вариантах осуществления роботизированная система дополнительно содержит один или несколько конечных выключателей, установленных на первой платформе и/или на второй платформе, при этом когда верхняя поверхность первой платформы по меньшей мере частично соприкасается с нижней поверхностью второй платформы, один или несколько конечных выключателей формируют сигнал.
[017] В некоторых вариантах осуществления вертикальная плоскость является плоскостью симметрии.
[018] В некоторых вариантах осуществления первая и вторая платформы обладают вращательной симметрией второго порядка.
[019] В некоторых вариантах осуществления первая и/или вторая рамы имеют по существу прямоугольную форму.
[020] В некоторых вариантах осуществления роботизированная система дополнительно содержит аккумуляторную батарею, установленную на первой платформе и электрически соединенную с первым набором электрических соединителей.
[021] В соответствии с другим аспектом настоящей технологии реализовано роботизированное транспортное средство, предназначенное для работы на складе. Роботизированное транспортное средство содержит первую платформу, способную перемещаться относительно пола. Первая платформа содержит раму, первый и второй позиционеры и первый набор электрических соединителей. Рама определяет вертикальную плоскость, проходящую через два противоположных угла рамы. Первый и второй позиционеры размещены на двух противоположных углах рамы в вертикальной плоскости. Первый и второй позиционеры способны взаимодействовать с третьим и четвертым позиционерами второй платформы. Первый набор электрических соединителей размещен на верхней поверхности рамы. Когда первый позиционер взаимодействует с одним из третьего и четвертого позиционеров, а второй позиционер взаимодействует с другим из третьего и четвертого позиционеров, обеспечивается электрическое соединение первого набора электрических соединителей со вторым набором электрических соединителей второй платформы.
[022] В некоторых вариантах осуществления первый и второй позиционеры представляют собой позиционирующее углубление или позиционирующий выступ.
[023] В некоторых вариантах осуществления первый и второй позиционеры представляют собой позиционирующие углубления, а первая платформа дополнительно содержит фиксирующий узел, соединенный с рамой. Фиксирующий узел содержит штифт и поджимающий элемент. Штифт способен перемещаться между первым положением, в котором часть штифта введена в позиционирующее углубление, и вторым положением, в котором эта часть штифта по меньшей мере частично выведена из позиционирующего углубления. Поджимающий элемент поджимает штифт в направлении первого положения.
[024] В некоторых вариантах осуществления вертикальная плоскость является плоскостью симметрии.
[025] В некоторых вариантах осуществления первая платформа обладает вращательной симметрией второго порядка.
[026] В некоторых вариантах осуществления рама имеет по существу прямоугольную форму.
[027] В некоторых вариантах осуществления роботизированное транспортное средство дополнительно содержит аккумуляторную батарею, электрически соединенную с первым набором электрических соединителей.
[028] В контексте настоящего описания термин «электронное устройство» используется для обозначения любых компьютерных аппаратных средств, способных обеспечивать работу программного обеспечения, подходящего для решения поставленной задачи. В контексте настоящего описания термин «электронное устройство» подразумевает, что устройство может функционировать в качестве сервера для других электронных и клиентских устройств, впрочем, это не носит обязательного характера для настоящей технологии. Таким образом, примерами (не имеющими ограничительного характера) электронных устройств являются персональные компьютеры (настольные компьютеры, ноутбуки, нетбуки и т.п.), смартфоны и планшеты, а также сетевое оборудование, например, маршрутизаторы, коммутаторы и шлюзы. Следует понимать, что в данном контексте функционирование оборудования в качестве электронного устройства не означает, что оно не может функционировать в качестве сервера для других электронных устройств. Употребление выражения «электронное устройство» не исключает использования нескольких клиентских устройств для приема, передачи, выполнения или инициирования выполнения каких-либо задач или запросов, результатов каких-либо задач или запросов либо шагов какого-либо описанного здесь способа.
[029] Здесь термины, относящиеся к пространственной ориентации, такие как вперед, назад, вверх, вниз, влево и вправо, соответствуют их общепринятому пониманию пользователем или оператором роботизированного транспортного средства. Термины, относящиеся к пространственной ориентации, при описании или указании элементов или подсистем устройства отдельно от устройства следует понимать так, как если бы эти элементы или подсистемы были установлены на устройстве.
[030] Каждый вариант осуществления настоящей технологии относится к по меньшей мере одному из вышеупомянутых аспектов, но не обязательно ко всем ним. Следует понимать, что некоторые аспекты настоящей технологии, связанные с попыткой достижения вышеупомянутой цели, могут не соответствовать этой цели и/или могут соответствовать другим целям, не упомянутым здесь явным образом.
[031] Дополнительные и/или альтернативные признаки, аспекты и преимущества вариантов осуществления настоящей технологии содержатся в дальнейшем описании, на приложенных чертежах и в формуле изобретения.
Краткое описание чертежей
[032] Для более полного понимания настоящей технологии, а также ее аспектов и дополнительных признаков далее приведено описание, которое следует использовать в сочетании с сопроводительными чертежами.
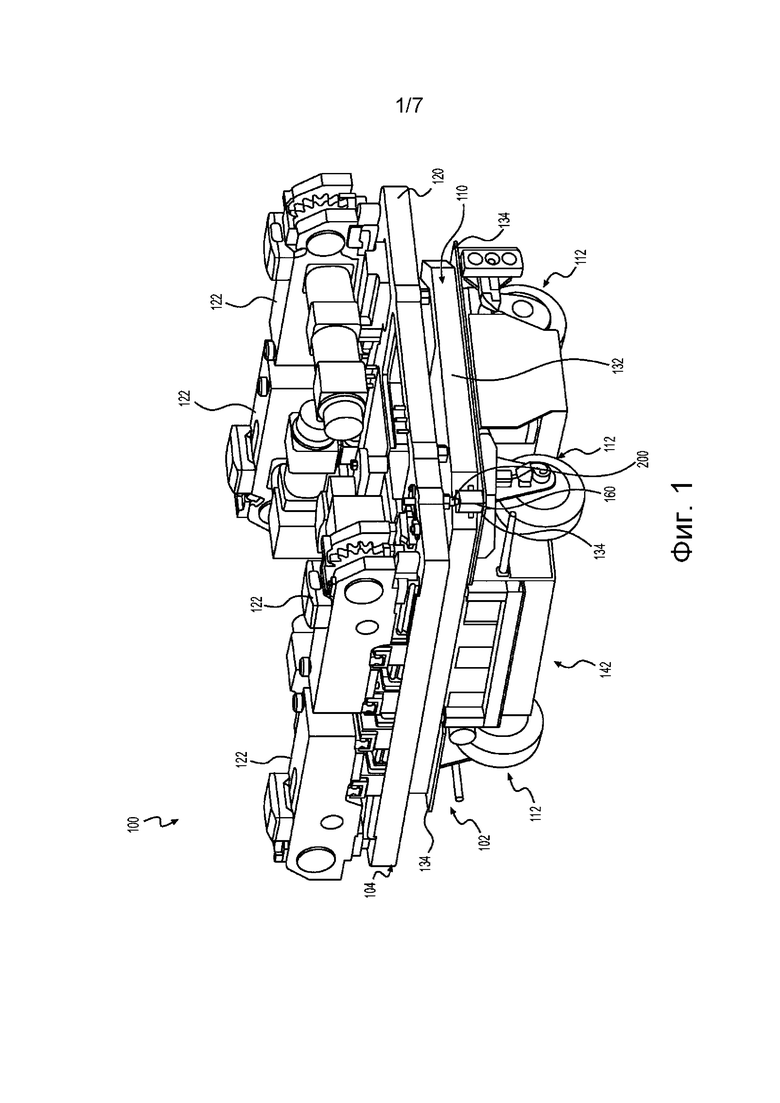
[033] На фиг. 1 представлен аксонометрический вид роботизированной системы в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
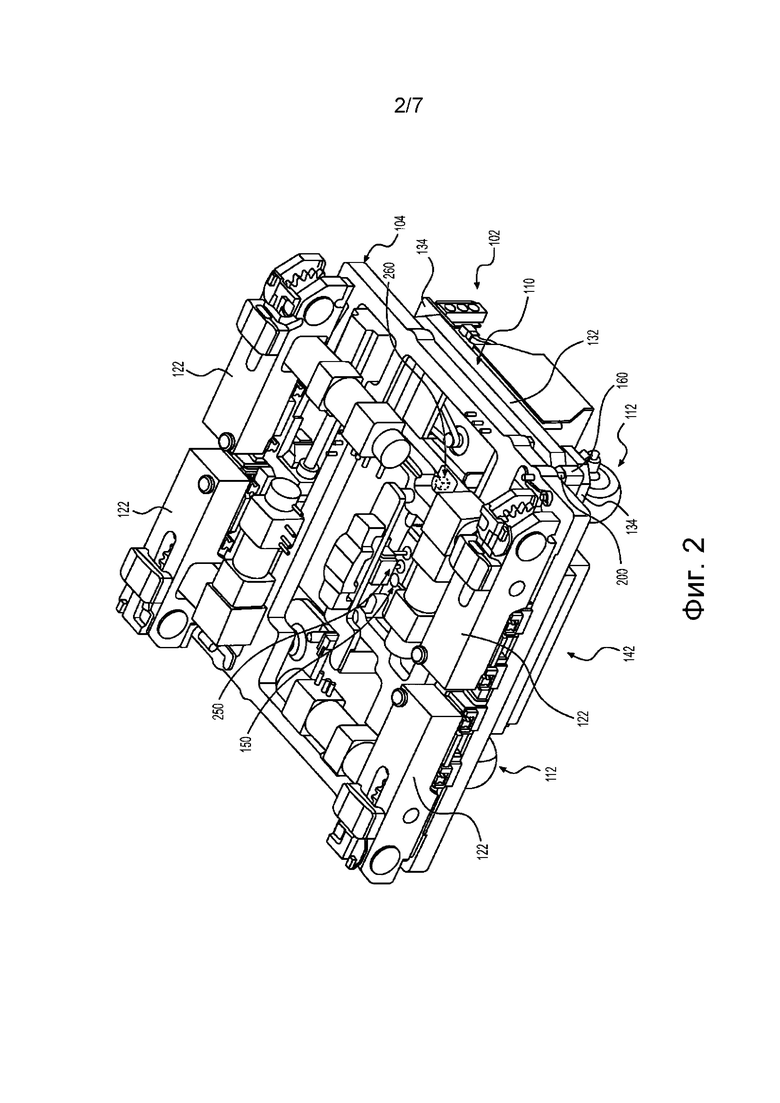
[034] На фиг. 2 представлен другой аксонометрический вид роботизированной системы, изображенной на фиг. 1, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
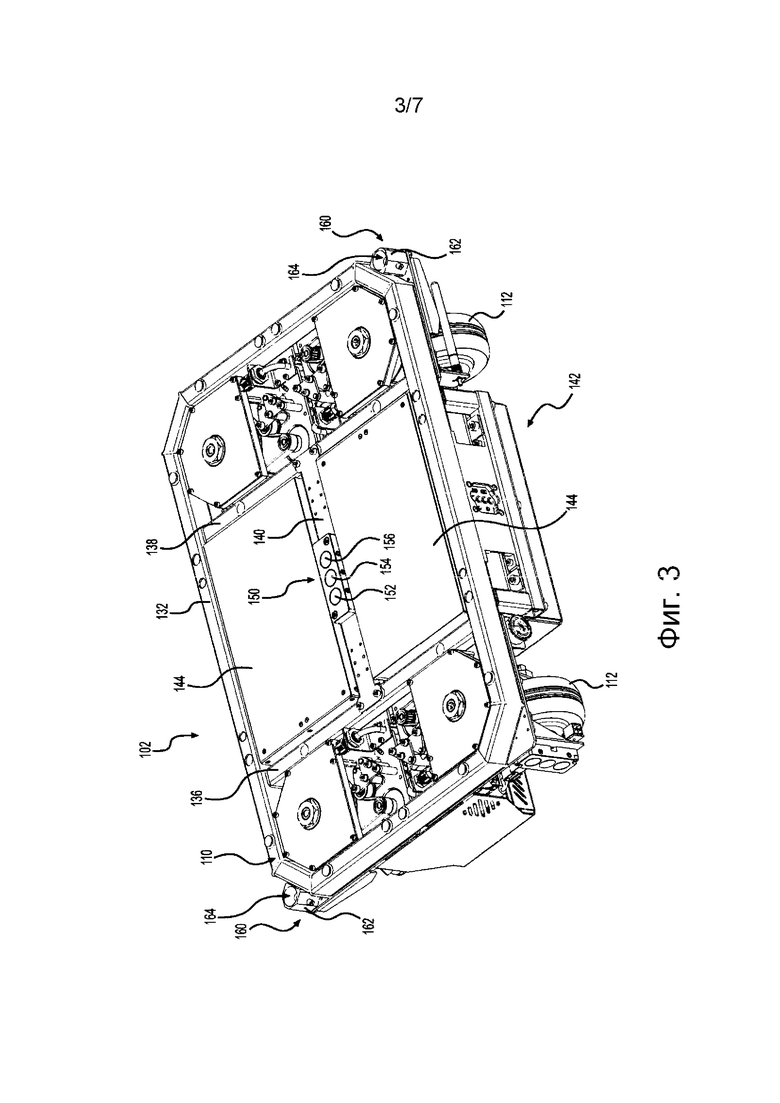
[035] На фиг. 3 представлен аксонометрический вид нижней платформы роботизированной системы, изображенной на фиг. 1, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
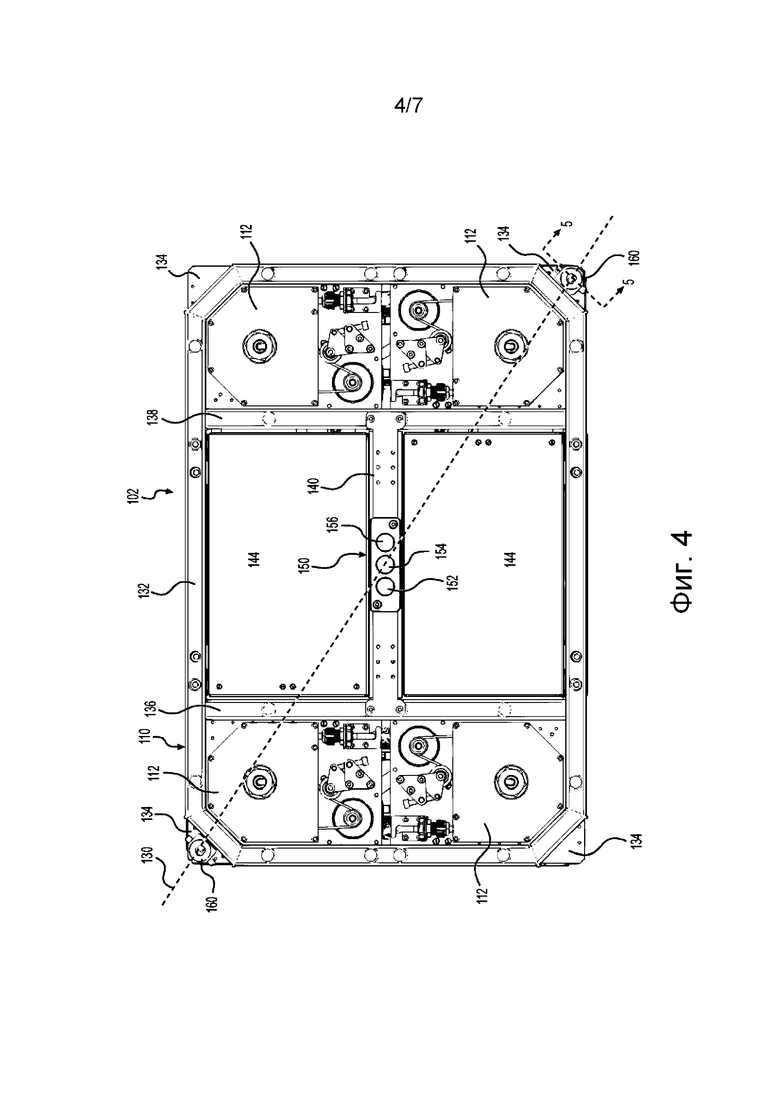
[036] На фиг. 4 представлен вид сверху нижней платформы, изображенной на фиг. 3, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
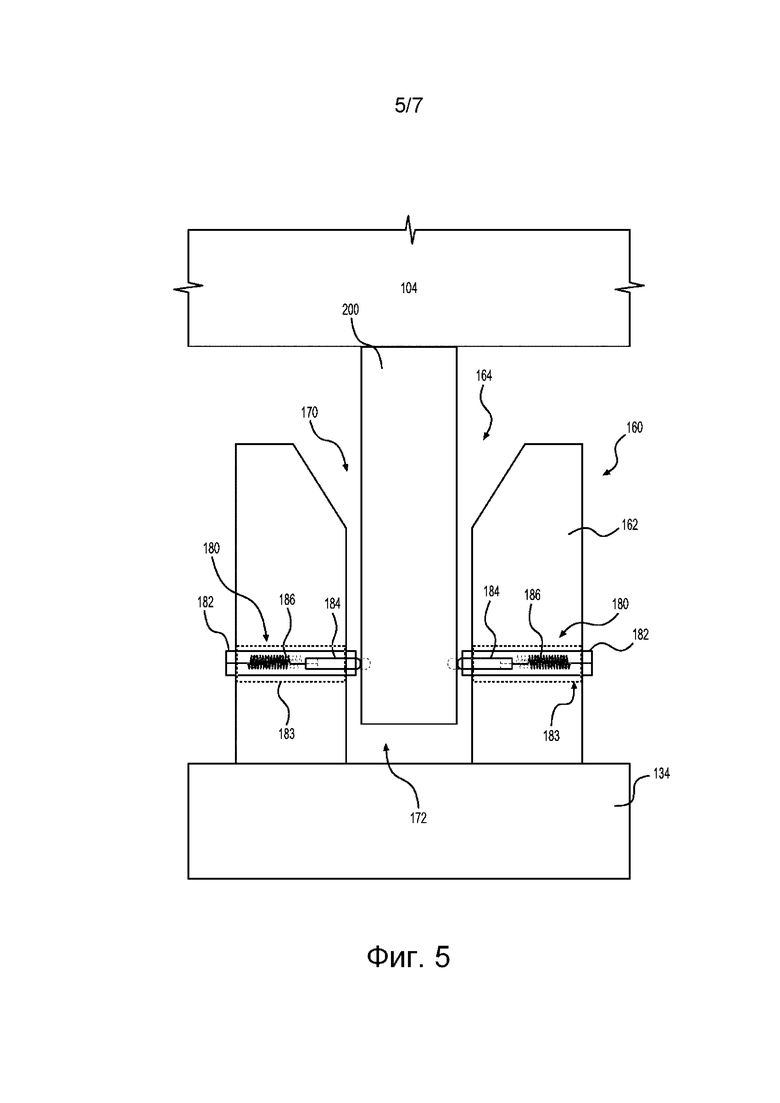
[037] На фиг. 5 схематически представлен вид в разрезе по линии 5-5, показанной на фиг. 4, верхнего и нижнего позиционеров роботизированной системы, изображенной на фиг. 1, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
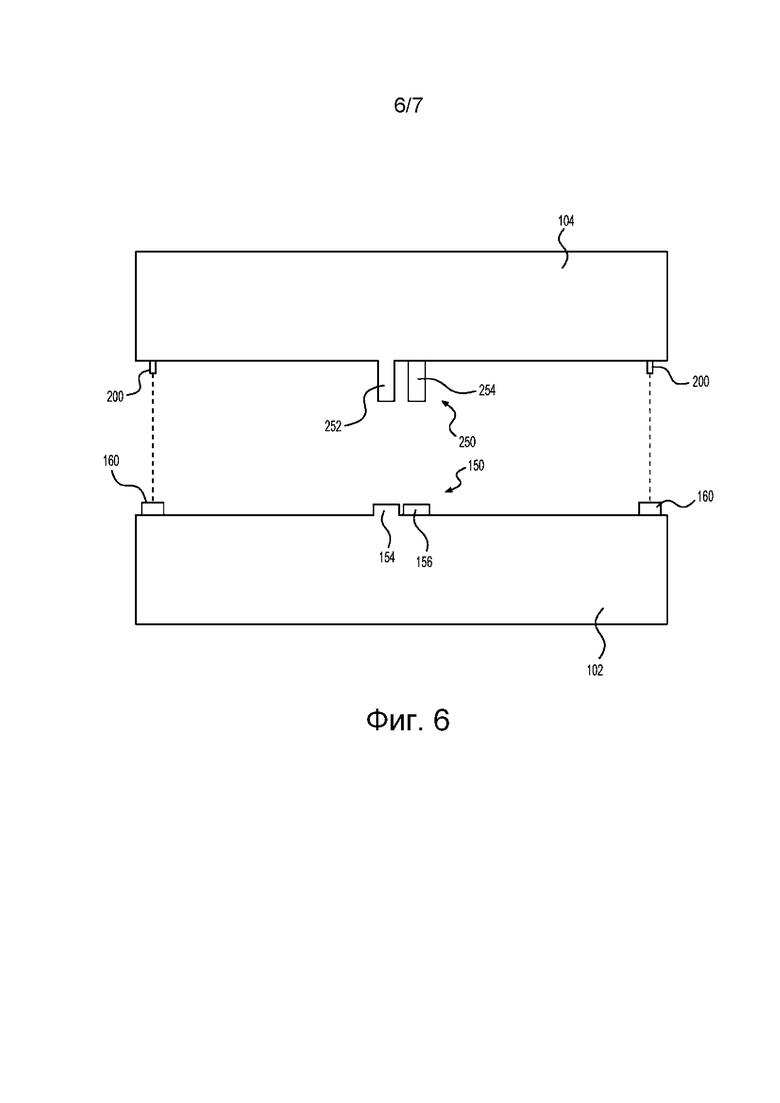
[038] На фиг. 6 схематически представлен вид роботизированной системы, изображенной на фиг. 1, в разъединенном состоянии в разрезе, выполненном в диагональной плоскости этой системы, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
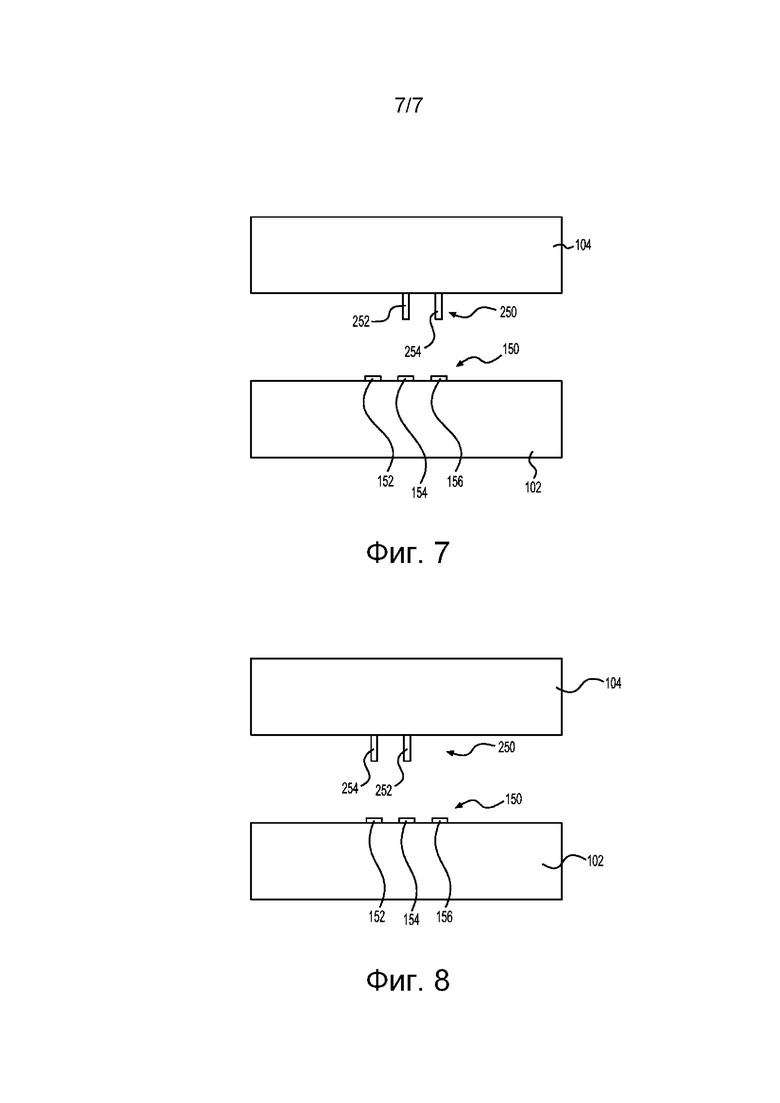
[039] На фиг. 7 схематически представлен вид верхней и нижней платформ роботизированной системы, изображенной на фиг. 1, в первой ориентации друг относительно друга в разрезе, выполненном в вертикальной центральной плоскости, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[040] На фиг. 8 схематически представлен вид верхней и нижней платформ, изображенных на фиг. 7, во второй ориентации друг относительно друга в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
Осуществление изобретения
[041] На фиг. 1 и 2 изображена роботизированная система 100. В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, роботизированная система 100 представляет собой робот-инвентаризатор 100, который может использоваться для перемещения различных предметов, хранящихся на складе, из одного места в другое, в частности, из места хранения в место обработки или отгрузки на складе. Такие предметы могут включать в себя, среди прочего, пищевые продукты, промышленные товары, сырье, используемое для производства различных продуктов и изделий, и т.п. В общем случае на складе могут быть установлены складские стеллажи с несколькими уровнями полок для хранения таких предметов. Предметы могут храниться на полках складских стеллажей как по отдельности, так и в контейнерах соответствующих размеров, например, на поддонах.
[042] Робот-инвентаризатор 100 способен передвигаться вдоль складских стеллажей (которые, как правило, образуют проходы на складе) и перемещать предметы, хранящиеся на полках складских стеллажей, в другие места на складе. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии робот-инвентаризатор 100 может содержать сканирующие датчики для сканирования предметов на полках в целях наблюдения и/или выбора предметов для перемещения. В одном из примеров робот-инвентаризатор 100 сканирует предметы, хранящиеся на полках, и определяет конкретный предмет, который необходимо переместить. Затем робот-инвентаризатор 100 забирает предмет с полки и перемещает его в нужное место. Робот-инвентаризатор 100 содержит нижнюю платформу 102 и верхнюю платформу 104, функционально связанную с нижней платформой 102. В некоторых вариантах осуществления нижняя платформа 102 называется нижним транспортным средством, а верхняя платформа 104 называется верхним транспортным средством. Робот-инвентаризатор 100 на фиг. 1 и 2 изображен в соединенном состоянии. Как описано ниже, верхняя платформа 104 может отводиться от нижней платформы 102 для перевода робота-инвентаризатора 100 в разъединенное состояние.
[043] Нижняя платформа 102 содержит нижнюю раму 110 и четыре колесных узла 112 (отдельно не обозначены). В некоторых вариантах осуществления количество колесных узлов 112 на нижней платформе 102 может быть как больше, так и меньше четырех. В других вариантах осуществления нижняя платформа 102 может быть оснащена другой двигательной системой, например, гусеничной системой. Четыре колесных узла 112 обеспечивают перемещение нижней платформы 102 и, соответственно, робота-инвентаризатора 100 по поверхности, например, по полу склада. Нижняя платформа 102 также оснащена нижними позиционерами 160, а также набором 150 нижних электрических соединителей, размещенных на нижней раме 110. Нижняя платформа 102, а также нижние позиционеры 160 и набор 150 нижних электрических соединителей более подробно описаны ниже.
[044] Верхняя платформа 104 имеет верхнюю раму 120 и четыре подъемных узла 122 (отдельно не обозначены). В некоторых вариантах осуществления количество подъемных узлов 122 на нижней раме 104 может быть как больше, так и меньше четырех. В других вариантах осуществления верхняя платформа 104 может быть оснащена подъемными узлами другого типа. В настоящем варианте осуществления четыре подъемных узла 122 могут взаимодействовать с соответствующими направляющими (не показаны). Четыре подъемных узла 122 при одновременном управлении ими могут перемещаться по соответствующим направляющим, обеспечивая перемещение верхней платформы 104 по этим направляющим в вертикальном направлении относительно нижней платформы 102. Верхняя платформа 104 также содержит верхние позиционеры 200 и набор 250 верхних электрических соединителей, размещенных на верхней раме 120. Как более подробно описано ниже, верхние позиционеры 200 могут взаимодействовать с нижними позиционерами 160 нижней платформы 102 для выравнивания верхней и нижней платформ 102, 104 друг относительно друга и совмещения по меньшей мере части набора 150 нижних электрических соединителей с набором 250 верхних электрических соединителей.
[045] Ниже со ссылкой на фиг. 1-4 приведено более подробное описание нижней платформы 102.
[046] Как показано на виде сверху, нижняя рама 110 имеет по существу прямоугольную форму. Предполагается, что в других вариантах осуществления нижняя рама 110 может иметь другую форму. Нижняя рама 110 определяет вертикальную плоскость 130, которая проходит через два противоположных угла нижней рамы 110. Вертикальная плоскость 130 является плоскостью симметрии, относительно которой нижняя рама 110 вращательно симметрична. В представленном варианте осуществления нижняя рама 110 обладает вращательной симметрией второго порядка относительно вертикальной плоскости 130. Предполагается, что в других вариантах осуществления нижняя рама 110 может быть двусторонне симметричной относительно вертикальной плоскости 130.
[047] Нижняя рама 110 содержит периферийный элемент 132. Периферийный элемент 132 имеет восьмиугольную форму, которая вписана в прямоугольную форму нижней рамы 110. Предполагается, что в некоторых вариантах осуществления периферийный элемент 132 может иметь другую форму. Также предполагается, что в некоторых вариантах осуществления периферийный элемент 132 может состоять из нескольких сегментов, соединенных друг с другом. Из-за восьмиугольной формы периферийного элемента 132 на углах нижней рамы 110 имеются треугольные части 134 (отдельно не обозначены), выходящие за пределы периферийного элемента 132. Как более подробно описано ниже, нижние позиционеры 160 находятся на двух противоположных треугольных частях 134.
[048] Нижняя рама 110 также содержит внутренний элемент 136, внутренний элемент 138, поперечину 140 и нижнюю часть 142. Внутренние элементы 136, 138 по существу параллельны друг другу и расположены от одного конца периферийного элемента 132 до его другого конца. Поперечина 140 расположена по центру между внутренними элементами 136, 138. Поперечина 140 в целом перпендикулярна внутренним элементам 136, 138. Нижняя часть 142 расположена под внутренними элементами 136, 138 вдоль них и служит опорой для различных предметов, в частности, для аккумуляторных батарей 144.
[049] Нижняя платформа 102 содержит набор 150 нижних электрических соединителей, электрически соединенных с аккумуляторными батареями 144, включающий в себя нижний соединитель 152, нижний соединитель 154 и нижний соединитель 156. Набор 150 нижних электрических соединителей размещен на верхней поверхности нижней платформы 102. В частности, набор 150 нижних электрических соединителей размещен на поперечине 140. Набор 150 нижних электрических соединителей размещен так, что нижний соединитель 152 находится с одной стороны вертикальной плоскости 130, нижний соединитель 154 расположен в вертикальной плоскости 130 (то есть по существу совмещен с ней), а нижний соединитель 156 находится с другой стороны вертикальной плоскости 130. Нижние соединители 152, 156 имеют полярность, противоположную полярности нижнего соединителя 154. Как более подробно описано ниже, такая компоновка набора 150 нижних электрических соединителей, в частности, позволяет соединять верхнюю платформу 104 с нижней платформой 102 двумя способами.
[050] По углам нижней рамы 110 установлены колесные узлы 112, соединенные с периферийным элементом 132 и одним из внутренних элементов 136, 138. Все колесные узлы 112 связаны с двигателем (не показан) для приведения их в движение.
[051] Ниже со ссылкой на фиг. 3-5 приведено более подробное описание нижних позиционеров 160 нижней платформы 102.
[052] В настоящем варианте осуществления предусмотрены два нижних позиционера 160. Предполагается, что в некоторых вариантах осуществления может использоваться более двух нижних позиционеров 160. Нижние позиционеры 160 размещены на противоположных углах нижней рамы 110 в вертикальной плоскости 130. Нижние позиционеры 160 расположены на двух противоположных треугольных частях 134. В некоторых вариантах осуществления нижние позиционеры 160 могут быть непосредственно соединены с периферийным элементом 132. В других вариантах осуществления нижние позиционеры 160 могут являться частью периферийного элемента 132.
[053] Поскольку два нижних позиционера 160 одинаковы, здесь описан лишь один нижний позиционер 160. В настоящем варианте осуществления нижний позиционер 160 представляет собой трубчатый элемент 162 с углублением 164. Предполагается, что в других вариантах осуществления углубление 164 может быть выполнено непосредственно в треугольной части 134. Углубление 164 включает в себя верхний участок 170 и нижний участок 172. Углубление 164 имеет форму воронки, вследствие чего его диаметр постепенно уменьшается от верхнего участка 170 к нижнему участку 172, а диаметр нижнего участка 172 остается по существу неизменным. Предполагается, что в других вариантах осуществления контур углубления 164 в горизонтальной плоскости может быть не круглым, а по существу прямоугольным и/или квадратным.
[054] Каждый нижний позиционер 160 включает в себя два фиксирующих узла 180. Предполагается, что в других вариантах осуществления каждый нижний позиционер 160 может иметь как один фиксирующий узел 180, так и три или более фиксирующих узлов 180. Поскольку два фиксирующих узла 180 одинаковы, здесь описан лишь один из них.
[055] Фиксирующий узел 180 содержит корпус 182, штифт 184 и поджимающий элемент 186. В некоторых вариантах осуществления корпус 182 может отсутствовать. Корпус 182 размещается в отверстии 183, выполненном в нижнем позиционере 160. Корпус 182 неподвижен относительно нижнего позиционера 160. В некоторых вариантах осуществления корпус 182 может быть ввинчен в трубчатый элемент 162. В других вариантах осуществления корпус 182 может быть запрессован в отверстие 183. Штифт 184 размещен в корпусе 182 и выступает с одного конца корпуса 182, по меньшей мере частично занимая углубление 164. В частности, штифт 184 расположен на нижнем участке 172 углубления 164. Штифт 184 может перемещаться между вдвинутым положением (показано сплошной линией на фиг. 5) и выдвинутым положением (показано пунктирной линией на фиг. 5). Поджимающий элемент 186, который также размещен в корпусе 182, поджимает штифт 184 в направлении выдвинутого положения. В настоящем варианте осуществления поджимающим элементом 186 является пружина. Предполагается, что в других вариантах осуществления поджимающим элементом 186 может быть упругий элемент другого типа, например, полимерный элемент. Как описано ниже, фиксирующие узлы 180 способны фиксировать соответствующие верхние позиционеры 200 в углублении 164.
[056] Ниже со ссылкой на фиг. 1, 2 и 6 приведено более подробное описание верхней платформы 104, содержащей верхние позиционеры 200, набор 250 верхних электрических соединителей и выключатель 260.
[057] Верхние позиционеры 200 размещены на противоположных углах верхней рамы 120. В частности, верхние позиционеры 200 размещены на верхней раме 120 верхней платформы 104 так, чтобы после выравнивания верхней и нижней платформ 102, 104 друг относительно друга (например, после их геометрического совмещения) в процессе работы верхние позиционеры 200 располагались в вертикальной плоскости 130 и могли входить в соответствующие углубления 164 нижних позиционеров 160. В показанном варианте осуществления верхние позиционеры 200 представляют собой позиционирующие выступы, соответствующие по размерам углублениям 164. В частности, верхние позиционеры 200 имеют такие размеры, чтобы они входили в нижний участок 172 углублений 164 с зазором. В некоторых случаях при размещении верхних позиционеров 200 в углублениях 164 может образовываться зазор между верхними позиционерами 200 и трубчатым элементом 162.
[058] Также предполагается, что в некоторых вариантах осуществления по меньшей мере один из нижних позиционеров 160 может представлять собой позиционирующий выступ, а по меньшей мере один из верхних позиционеров 200 может образовывать углубление 164.
[059] Набор 250 верхних электрических соединителей, размещенных на нижней поверхности верхней платформы 104, включает в себя верхний соединитель 252 и верхний соединитель 254. Верхние соединители 252, 254 имеют противоположные полярности. Верхние соединители 252, 254 электрически соединены с подъемными узлами 122 через аккумуляторную батарею (не показана). Как более подробно описано ниже, набор 250 верхних электрических соединителей может соединяться с набором 150 нижних электрических соединителей двумя способами.
[060] К верхней раме 120 подключен выключатель 260 (показанный на фиг. 1), который обеспечивает сигнал о том, что верхняя и нижняя платформы 102, 104 находятся в соединенном состоянии, когда верхняя и нижняя платформы 102, 104 соединены друг с другом (то есть когда верхние позиционеры 200 полностью входят в нижние позиционеры 160 и по меньшей мере часть верхней поверхности нижней платформы 102 соприкасается по меньшей мере с частью нижней поверхности верхней платформы 104).
[061] Ниже со ссылкой на фиг. 2 и 5-7 приведено описание перевода роботизированного транспортного средства 100 в соединенное и разъединенное состояния.
[062] На фиг. 2 робот-инвентаризатор 100 находится в соединенном состоянии, в котором верхняя и нижняя платформы 102, 104 функционально связаны друг с другом, а по меньшей мере часть верхней поверхности нижней платформы 102 соприкасается по меньшей мере с частью нижней поверхности верхней платформы 104. Соответственно, выключатель 260 сигнализирует о том, что робот-инвентаризатор 100 находится в соединенном состоянии. Верхние позиционеры 200 взаимодействуют с нижними позиционерами 160. В частности, верхние позиционеры 200 размещены в соответствующих углублениях 164 и взаимодействуют со штифтами 184, вследствие чего штифты находятся во вдвинутом положении. Взаимодействие между верхними и нижними позиционерами 160, 200 (например, между верхними позиционерами 200 и фиксирующими узлами 180) способствует сохранению положения верхней платформы 104 относительно нижней платформы 102. Например, когда колесные узлы 112 приводят в движение нижнюю платформу 102, верхняя платформа 104 остается в целом неподвижной относительно нижней платформы 102. Кроме того, когда робот-инвентаризатор 100 находится в соединенном состоянии, набор 250 верхних электрических соединителей соединен с набором 150 нижних электрических соединителей. В показанном варианте осуществления верхний электрический соединитель 252 электрически соединен с нижним электрическим соединителем 154, а верхний электрический соединитель 254 электрически соединен с нижним электрическим соединителем 156. Как описано ниже, предполагается, что набор 250 верхних электрических соединителей может быть соединен с набором 150 нижних электрических соединителей и другим способом.
[063] На фиг. 6 робот-инвентаризатор 100 находится в разъединенном состоянии, в котором верхняя платформа 104 и нижняя платформа 102 разнесены по вертикали. Верхняя платформа 104 отведена от нижней платформы 102 по вертикали за счет взаимодействия подъемных узлов 122 с соответствующими направляющими (не показаны). Это может выполняться, например, для извлечения товара с верхней полки на складе.
[064] Для возврата в соединенное положение верхняя платформа 104 подводится к нижней платформе 102. В силу ряда причин верхняя и нижняя платформы 102, 104 могут смещаться друг относительно друга. В некоторых случаях такое смещение может приводить, среди прочего, к нарушению соединения между набором 250 верхних электрических соединителей и набором 150 нижних электрических соединителей.
[065] При движении верхней платформы 104 к нижней платформе 102 верхние позиционеры 200 входят в верхний участок 170 углублений 164. Верхний участок 170, диаметр которого превышает диаметр верхних позиционеров 200, обеспечивает запас для компенсации смещения между верхней и нижней платформами 102, 104. На практике, если верхняя и нижняя платформы 102, 104 смещены незначительно, верхний участок 170 углублений 164 обеспечивает попадание в него верхних позиционеров 200, их перевод в надлежащее положение и выравнивание за счет этого верхней платформы 104. В конечном итоге верхние позиционеры 200 входят в нижний участок 172 и взаимодействуют с фиксирующими узлами 180, а выключатель 260 сигнализирует о том, что роботизированное транспортное средство 100 находится в соединенном состоянии. Следует отметить, что взаимодействие верхних и нижних позиционеров 160, 200 обеспечивает надлежащее соединение друг с другом наборов 150, 250 верхних и нижних электрических соединителей.
[066] Как показано на фиг. 7 и 8, верхняя платформа 104 может быть соединена с нижней платформой 102 двумя способами, в частности, благодаря симметричной компоновке нижней платформы 102 относительно вертикальной плоскости 130 и компоновке наборов 150, 250 верхних и нижних электрических соединителей.
[067] В одной ориентации, показанной на фиг. 7, верхняя платформа 104 может быть соединена с нижней платформой 102 так, чтобы верхний электрический соединитель 252 был электрически соединен с нижним электрическим соединителем 154, а верхний электрический соединитель 254 - с нижним электрическим соединителем 156.
[068] В другой ориентации, показанной на фиг. 8, верхняя платформа 104 может быть повернута на 180° и соединена с нижней платформой 102 так, чтобы верхний электрический соединитель 254 был электрически соединен с нижним электрическим соединителем 152, а верхний электрический соединитель 252 - с нижним электрическим соединителем 154.
[069] Для специалиста в данной области могут быть очевидными возможные изменения и усовершенствования описанных выше вариантов осуществления настоящей технологии. Предшествующее описание приведено лишь в иллюстративных целях, а не для ограничения объема изобретения. Объем охраны настоящей технологии определяется исключительно объемом приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесный узел для роботизированного транспортного средства и оснащенное им роботизированное транспортное средство. | 2023 |
|
RU2831446C1 |
| ПОДЪЕМНЫЙ УЗЕЛ, ОСНАЩЕННАЯ ИМ ПЛАТФОРМА И СКЛАДСКОЙ РОБОТ | 2024 |
|
RU2841430C1 |
| УСТРОЙСТВО "РОБОТИЗИРОВАННАЯ РУКА" | 2010 |
|
RU2541754C2 |
| СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-ИНВЕНТАРИЗАТОРОМ | 2023 |
|
RU2839294C1 |
| Роботизированная сельскохозяйственная платформа | 2024 |
|
RU2834465C1 |
| Платформенное транспортное средство и способы управления платформенным транспортным средством | 2024 |
|
RU2839400C1 |
| ПЛАТФОРМЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБЫ УПРАВЛЕНИЯ ПЛАТФОРМЕННЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2024 |
|
RU2839126C1 |
| Устройство для замены аккумулятора для транспортных средств, двойная подвижная подъемная станция для замены аккумулятора и система для замены аккумулятора | 2020 |
|
RU2812712C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СТАНЦИЯ | 2014 |
|
RU2657958C2 |
| Система захвата и позиционирования листа | 2016 |
|
RU2733005C2 |
Группа изобретений относится к роботизированным системам, оснащенным позиционерами платформ. Роботизированная система включает в себя первую и вторую платформы. Первая платформа содержит первую раму, которая определяет вертикальную плоскость, первый и второй позиционеры, размещенные на двух противоположных углах первой рамы в вертикальной плоскости, и первый набор электрических соединителей. Вторая платформа содержит вторую раму, способную перемещаться относительно первой рамы в вертикальном направлении, третий и четвертый позиционеры и второй набор электрических соединителей. Когда третий и четвертый позиционеры взаимодействуют, соответственно, с первым и вторым позиционерами, обеспечивается электрическое соединение первого и второго наборов электрических соединителей друг с другом. Достигается возможность точного позиционирования платформ относительно друг друга и их электрическое соединение. 2 н. и 17 з.п. ф-лы, 8 ил.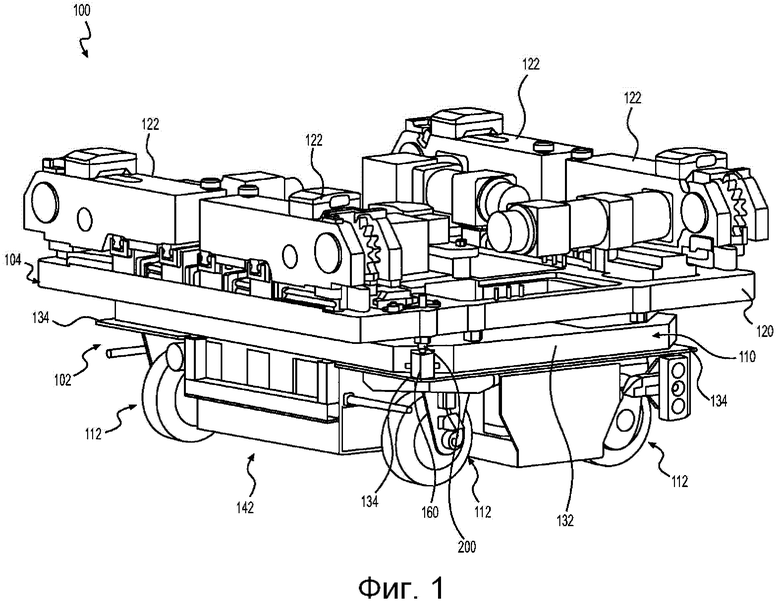
1. Роботизированная система для работы на складе с полом, содержащая:
- первую платформу, способную перемещаться относительно пола и содержащую первую раму, определяющую вертикальную плоскость, проходящую через два противоположных угла первой рамы, первый и второй позиционеры, размещенные на двух противоположных углах первой рамы в вертикальной плоскости, и первый набор электрических соединителей, размещенный на верхней поверхности первой рамы;
- вторую платформу, функционально связанную с первой платформой и содержащую вторую раму, способную перемещаться относительно первой рамы в вертикальном направлении, третий и четвертый позиционеры, размещенные на второй раме в вертикальной плоскости, каждый из которых способен выборочно взаимодействовать с каждым из первого и второго позиционеров, и второй набор электрических соединителей, размещенный на нижней поверхности второй рамы,
причем когда третий позиционер взаимодействует с одним из первого и второго позиционеров, а четвертый позиционер взаимодействует с другим из первого и второго позиционеров, то обеспечивается электрическое соединение первого набора электрических соединителей со вторым набором электрических соединителей.
2. Роботизированная система по п. 1, в которой:
- первый набор электрических соединителей содержит первый электрический соединитель, расположенный с одной стороны вертикальной плоскости, второй электрический соединитель, расположенный в вертикальной плоскости, и третий электрический соединитель, расположенный с другой стороны вертикальной плоскости; и
- второй набор электрических соединителей содержит четвертый электрический соединитель и пятый электрический соединитель,
причем когда третий позиционер взаимодействует с первым позиционером, а четвертый позиционер взаимодействует со вторым позиционером, то четвертый электрический соединитель электрически соединяется со вторым электрическим соединителем, а пятый электрический соединитель соединяется с одним из первого и третьего электрических соединителей, а когда третий позиционер взаимодействует со вторым позиционером, а четвертый позиционер взаимодействует с первым позиционером, то четвертый электрический соединитель электрически соединяется со вторым электрическим соединителем, а пятый электрический соединитель соединяется с другим из первого и третьего электрических соединителей.
3. Роботизированная система по п. 2, в которой второй электрический соединитель имеет отрицательную или положительную полярность, противоположную полярности первого и третьего электрических соединителей, а четвертый электрический соединитель имеет отрицательную или положительную полярность, противоположную полярности пятого электрического соединителя.
4. Роботизированная система по п. 1, в которой первый и второй позиционеры представляют собой позиционирующее углубление или позиционирующий выступ, а третий и четвертый позиционеры представляют собой, соответственно, позиционирующий выступ или позиционирующее углубление.
5. Роботизированная система по п. 4, дополнительно содержащая фиксирующий узел, соединенный с одной из первой и второй рам, имеющей позиционирующие углубления, и содержащий:
- штифт, способный перемещаться между первым положением, в котором часть штифта введена в позиционирующее углубление, и вторым положением, в котором эта часть штифта по меньшей мере частично выведена из позиционирующего углубления; и
- поджимающий элемент, способный поджимать штифт в направлении первого положения.
6. Роботизированная система по п. 4, в которой позиционирующие выступы имеют по существу цилиндрическую форму, а каждое из позиционирующих углублений включает в себя первый участок, верхняя часть которого шире его нижней части, и второй участок, расположенный под первым участком и имеющий размеры, обеспечивающие размещение в нем по меньшей мере части позиционирующего выступа.
7. Роботизированная система по п. 6, в которой позиционирующие выступы и позиционирующие углубления выполнены так, чтобы позиционирующие выступы входили с зазором в позиционирующие углубления на втором участке.
8. Роботизированная система по п. 1, дополнительно содержащая один или несколько конечных выключателей, установленных на первой платформе и/или на второй платформе, при этом когда верхняя поверхность первой платформы по меньшей мере частично соприкасается с нижней поверхностью второй платформы, один или несколько конечных выключателей формируют сигнал.
9. Роботизированная система по п. 1, в которой вертикальная плоскость является плоскостью симметрии.
10. Роботизированная система по п. 1, в которой первая и вторая платформы обладают вращательной симметрией второго порядка.
11. Роботизированная система по п. 1, в которой первая и/или вторая рамы имеют по существу прямоугольную форму.
12. Роботизированная система по п. 1, дополнительно содержащая аккумуляторную батарею, установленную на первой платформе и электрически соединенную с первым набором электрических соединителей.
13. Роботизированное транспортное средство, предназначенное для работы на складе, содержащее:
- первую платформу, способную перемещаться относительно пола и содержащую раму, определяющую вертикальную плоскость, проходящую через два противоположных угла рамы, первый и второй позиционеры, размещенные на двух противоположных углах рамы в вертикальной плоскости и способные взаимодействовать с третьим и четвертым позиционерами второй платформы; и
- первый набор электрических соединителей, размещенный на верхней поверхности рамы,
причем когда первый позиционер взаимодействует с одним из третьего и четвертого позиционеров, а второй позиционер взаимодействует с другим из третьего и четвертого позиционеров, то обеспечивается электрическое соединение первого набора электрических соединителей со вторым набором электрических соединителей второй платформы.
14. Роботизированное транспортное средство по п. 13, в котором первый и второй позиционеры представляют собой позиционирующее углубление или позиционирующий выступ.
15. Роботизированное транспортное средство по п. 14, в котором первый и второй позиционеры представляют собой позиционирующие углубления, а первая платформа дополнительно содержит фиксирующий узел, соединенный с рамой и содержащий:
- штифт, способный перемещаться между первым положением, в котором часть штифта введена в позиционирующее углубление, и вторым положением, в котором эта часть штифта по меньшей мере частично выведена из позиционирующего углубления; и
- поджимающий элемент, способный поджимать штифт в направлении первого положения.
16. Роботизированное транспортное средство по п. 13, в котором вертикальная плоскость является плоскостью симметрии.
17. Роботизированное транспортное средство по п. 13, в котором первая платформа обладает вращательной симметрией второго порядка.
18. Роботизированное транспортное средство по п. 13, в котором рама имеет по существу прямоугольную форму.
19. Роботизированное транспортное средство по п. 13, дополнительно содержащее аккумуляторную батарею, электрически соединенную с первым набором электрических соединителей.
| CN 109941659 A, 28.06.2019 | |||
| US 2023097284 A1, 30.03.2023 | |||
| CN 108439252 A, 24.08.2018 | |||
| US 2020030962 A1, 30.01.2020 | |||
| 0 |
|
SU153715A1 | |

