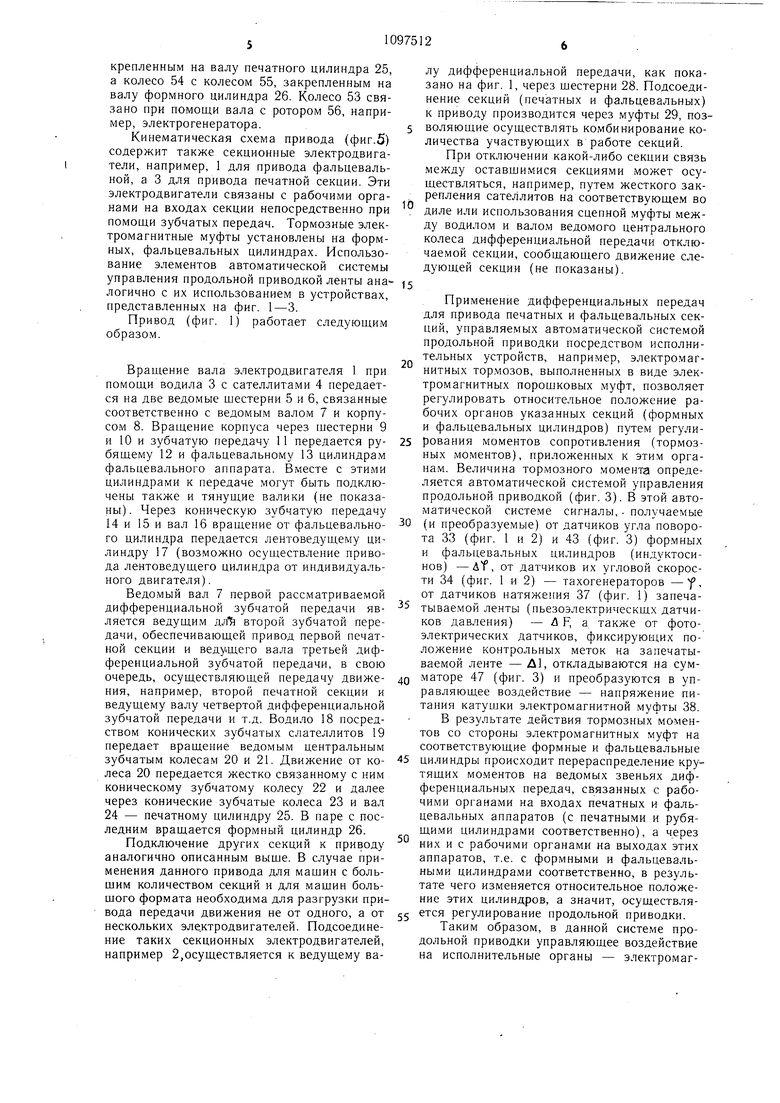
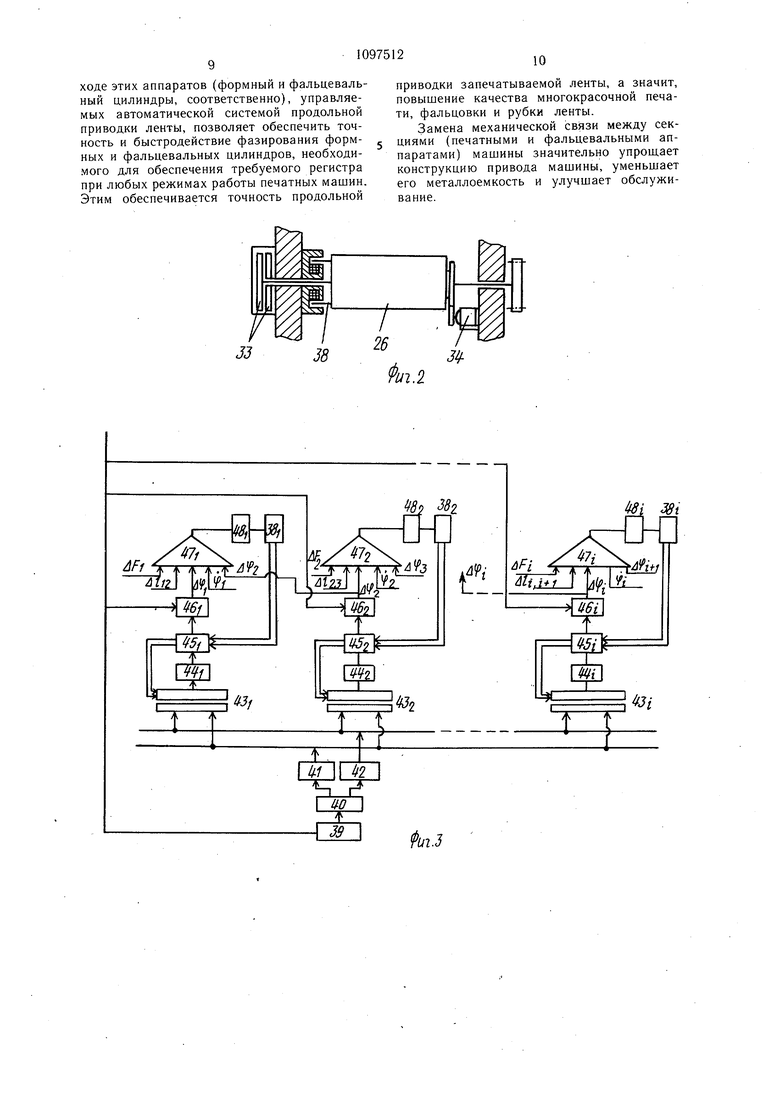
Изобретение относится к полиграфическому машиностроению и может быть использовано, например, в рулонных ротационных печатных машинах и агрегатах, а также в других машинах и агрегатах как полиграфической, так и других отраслей машиностроения, в которых используется секционный принцип построения. Известен привод многосекционной ротационной рулонной печатной машины, содержащий дифференциальные передачи, связанные с валами печатных и формных цилиндров печатных секций и с валами рубящих и фальцевальных цилиндров фальцевальных секций, и автоматическую систему управления продольной приводкой запечатываемой ленты со следящим средством и усилительно преобразовательным средством 1. Однако в известном приводе отсутствует связь параметров состояния и движения ленты и рабочих органов - цилиндров печатных и фальцевальных секций. Вследствие этого введение автоматической системы управления продольной приводкой коррекции в движение ленты осуществляется без учета движения рабочих органов, что обусловливает недостаточную точность и надежность синхронизации движения рабочих органов и ленты и ухудшает качество печати. Кроме того, для синхронизации движения рабочих органов печатных и фальцевальных секций используется громоздкий, соответствующий длине всей печатной машины замыкающий вал, что ухудшает условия ее обслуживания, повышает металлоемкость машины, а также увеличивает энергозатраты для ее привода. Цель изобретения - повышение качества печати. Указанная цель достигается тем, что в приводе многосекционной рулонной печатной машины, содержащем дифференциальные передачи, связанные с валами печатных и формных цилиндров печатных секций и с валами рубящих и фальцевальных цилиндров фальцевальных секций, и автоматическую систему управленияпродольной приводкой запечатываемой ленты со следящим средством и усилительно-преобразовательным средством, автоматическая система управления имеет электромагнитные муфты, связанные с валами формных и фальцевальных цилиндров соответственно печатных и фальцевальных секций и с усилительно-преобразовательным средством, а следящее средство имеет электрически связанные с усилительно-преобразовательным средством датчики угла поворота и скорости валов формных и фальцевальных цилиндров, а также датчики натяжения ленты, установленные перед печатными и фальцевальными секциями. На фиг.-1 приведена кинематическая схема привода многосекционной ротационной печатной машины со следящими и исполнительными средствами автоматической системы продольной приводки ленты и дифференциальным приводом рабочих органов на входах печатных и фальцевальных секций - соответственно печатных и рубящего цилиндров; на фиг. 2 - расположение датчиков угла поворота и скорости формного (фальцевального) цилиндра следящего средства и связанной с этим цилиндром электромагнитной муфты; на фиг. 3 - принципиальная схема автоматической системы управления продольной приводкой; на фиг. 4 - кинематическая схема дифференциального привода одной из печатных секций от индивидуального электродвигателя; на фиг. 5 - кинематическая схема многодвигательного привода печатных и фальцевальной секций многосекционной рулонной ротационной печатной йащины с приводом рабочих органов на входах секций от индивидуальных электродвигателей посредством простых зубчатых передач. Привод многосекционной ротационной ру лонной печатной машины (фиг. 1) содержит один приводной электродвигатель 1 или секционные электродвигатели 2. Вал электродвигателя 1 соединен с водилом 3 дифференциальной передачи, несущим сателлиты 4, которые зацепляются с центральными ведомыми зубчатыми колесами 5 и 6, закрепленными соответственно на валу 7 и на, корпусе 8. На этом корпусе закреплено также зубчатое колесо 9, связанное посредством шестерни 10 и зубчатых передач 11 с рубящим 12 и фальцевальным 13 цилиндрами, а затем посредством зубчатых передач 14 и 15 и вала 16 с лентоведущим цилиндром 17. Вал 7 является ведущим во второй дифференциальной зубчатой передаче, связывающим также первую и вторую печатные секции. На валу закреплено водило 18 с сателлитами 19, связанными с ведомыми центральными зубчатыми колесами 20 и 21. Колесо 20 жестко связано с коническим зубчатым колесом 22, а через конические зубчатые колеса 23 и вал 24 - с печатным цилиндром 25, работающим в паре с формным цилиндром 26. Связь между этими цилиндрами выполнена в виде зацепления цилиндрических зубчатых колес, закрепленных на валах этих цилиндров (или на торцах самих цилиндров). Зубчатое колесо 21 -жестко закреплено на валу- 27, являющемся ведущим и дифференциальной зубчатой передаче, связывающей, например,вторую и третью печатные секции. Второй секционный электродвигатель 2 (в случае выполнения привода многодвигательным) связан с приводом через зубчатую передачу 28 с валом 27. Валы привода соединены между собой соединительными муфтами 29. Привод последней печатной секции 30 осуществляется от ведомого вала 31 предыдущей дифференциальной передачи через простую зубчатую передачу 32.
Следящее устройство (фиг. 1 и 2) содержит датчик 33 угла поворота формного (фальцевального, лентоведущего) цилиндраиндуктосии, датчик 31 скорости этого цилиндра. Они связаны непосредственно с валами этих цилиндров. В стройстве имеется датчик натяжения запечатываемой ленты, состоящей из лентонапразляющего валика 35, закрепленного на рычагах 36, свободно качающихся на оси и установленных между упорами, на одном из которых закреплен пьезоэлектрический датчик давления 37. На валу формного цилиндра также закреплена подвижная часть электромагнитной порощковой муфты 38.
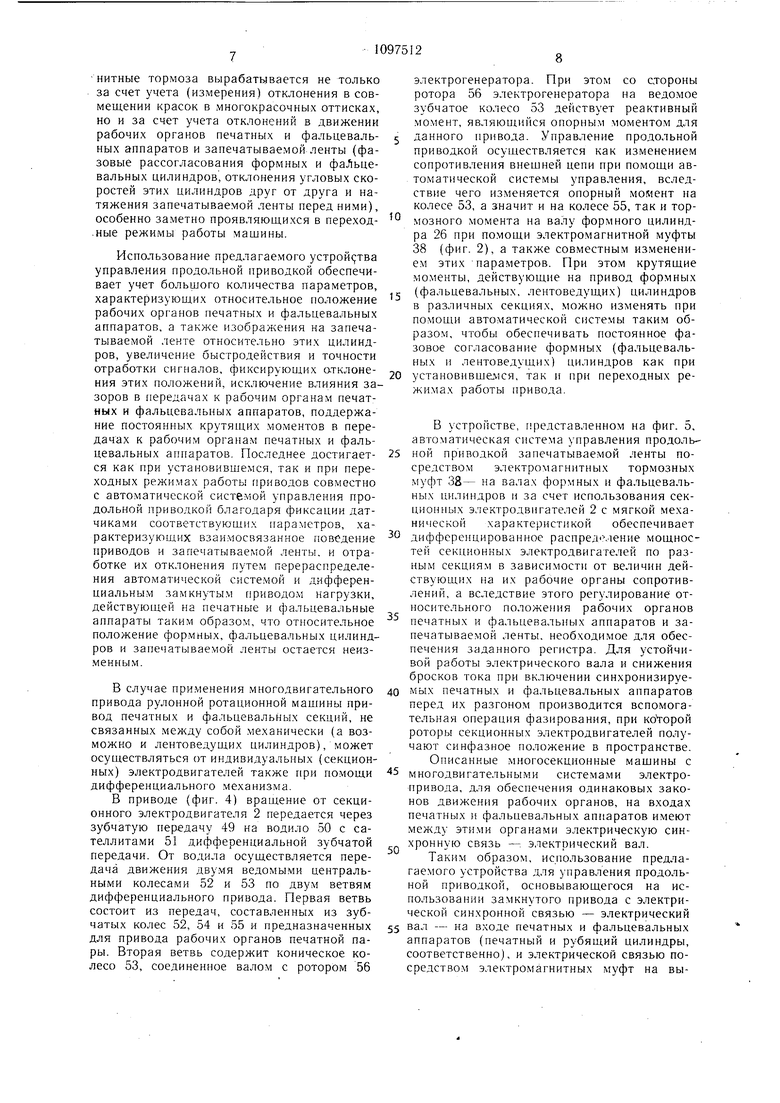
На принципиальной схеме автоматической системы управления продольной привОдкой (на фиг. 3 представлена в виде блоксхемы с детализацией ее по отработке одного из возмущений - отклонения относительного положения формных и фальцевальных цилиндров) показано формирование сигналов, пропорциональных углам поворота формных и фальцевальных цилиндров датчиками 33 (фиг. 1 и 2). Формирование и преобразование сигналов от датчиков скорости формных (фальцевальных и лентоведущих) цилиндров, от датчиков натяжения запечатываемой ленты, а также от датчиков, фиксирующих положение контрольных меток на ленте, осуществляется известными методами и на блок-схеме не отражено.
На принципиальной схеме (фиг. 3) показано соединение генератора 39, осуществляющего питание через фазосдвигающую цепочку 40 и усилитель статора 41 и 42 со сдвигом в 90°, статорных обмоток 43, 43г и т.д. индуктосинов 36 (фиг. 1 и 2), что обеспечивает создание вращающегося магнитного поля. Статорные обмотки жестко связаны со станиной мащины, а роторные - с валами формных, фальцевальных и лентоведущих цилиндров или с самими цилиндрами. Изменение фазы напряжения на зажимах роторных обмоток индуктосинов, вызываемое поворотом этих цилиндров, после прохода через усилитель ротора 44 и фазовращатель 45 является одним из входов фазочувствительного выпрямителя 46, второй вход которого соединен с генератором 39. Выходное напряжение выпрямителя 46 в виде сигнала Д Y , пропорционального углу поворота первого цилиндра, вместе с преобразованными сигналами от других датчиков, например, для первого цилиндра: Д Fj - от датчика натяжения запечатываемой ленты перед первым цилиндром, - от датчика скорости (например, тахогенератора) первого цилиндра, Л 1 п - от фотоэлектрических датчиков, следящих за контрольными метками на запечатываемой ленте, д .j -
от фазочувствительного выпрямителя в цепочке управления положением второго цилиндра, - являются входом суммирующего устройства 47( . Сигнал, полученный на его выходе после прохождения усилителя 48f является входом исполнительного устройства - электромагнитного тормоза, выполненного в виде электромагнитной порошковой муфты 38j, неподвижная часть которой закреплена на станине машины, а подвижная ее часть на валу формного (или фальцевального или лентоведущего) цилиндра и связана с ротором фазовращателя 41, который может быть выполнен, например, совмещенным с индуктосином. Эти связи между указанными элементами отображены на фиг. 3 двойными линиями.
Связь с элементами автоматической системы управления продольной приводкой, взаимодействующими с рабочими органами других секций машины (печатными, фальцевальными) или лентоведущими цилиндрами, аналогична описанным выще. Назначение индуктосинов 43 в данной - это измерение с высокой точностью угла поворота формных, фальцевальных и лентоведущих цилиндров относительно неподвижной системы отсчета - станины ма1нины с целью определения сПОМОЩЬЮ данной системы управления относительного (фазового) положения этих цилиндров.
Назначение электромагнитных тормозов 38 - осуществление регулирования относительного угла поворота формных, фальцевальных н лентоведущих цилиндров за счет необходимого изменения тормозного момента, величина которого определяется описанной выше автоматичес-кой системой управления приводной. Этим самым осуществляется регулирование фазового положения формных, фальцевальных и лентоведущих цилиндров друг относительно друга, а значит, и продольной приводкой печати, рубка и фальцовки ленты. При этом поворот подвижной части муфты 38, а значит, и ротора фазовращателя 45 сводит к нулю появившийся на выходе суммирующего устройства 47 сигнал рассогласования. Таким образом, полностью компенсируется изменение фазы, вызванное поворотом ротора индуктосина, связанного с соответствующим цилиндром (формным, фальцевальным, лентоведушим), а также изменениями скорости его вращения, натяжения ленты и смещения меток на ней.
Привод печатной секции (фиг. 4) содержит секционный электродвигатель 2, соединенный посредством зубчатой передачи 49 с водилом 50, несущим сателлиты 51, выполненные в виде конических зубчатых колес. Сателлиты 51 осуществляют привод двух ведомых центральных конических колес 52 и 53. Коническое зубчатое колесо 52 жестко связано с цилиндрическим колесом 54, закрепленным на валу печатного цилиндра 25, а колесо 54 с колесом 55, закрепленным на валу формного цилиндра 26. Колесо 53 связано при немощи вала с ротором 56, например, электрогенератора. Кинематическая схема привода (фиг.5) содержит также секционные электродвигатели, например, 1 для привода фальцевальной, а 3 для привода печатной секции. Эти электродвигатели связаны с рабочими органами на входах секции непосредственно при помощи зубчатых передач. Тормозные электромагнитные муфты установлены на формных, фальцевальных цилиндрах. Использование элементов автоматической системы управления продольной приводкой ленты ана логично с их использованием в устройствах, представленных на фиг. 1-3. Привод (фиг. I) работает следующим образом. Вращение вала электродвигателя 1 при помощи водила 3 с сателлитами 4 передается на две ведомые щестерни 5 и 6, связанные соответственно с ведомым валом 7 и корпусом 8. Вращение корпуса через щестерни 9 и 10 и зубчатую передачу 11 передается рубящему 12 и фальцевальному 13 цилиндрам фальцевального аппарата. Вместе с этими цилиндрами к передаче могут быть подключены также и тянущие валики (не показаны). Через коническую зубчатую передачу 14 и 15 и вал 16 вращение от фальцевального цилиндра передается лентоведущему цилиндру 17 (возможно осуществление привода лентоведущего цилиндра от индивидуального двигателя). Ведо.мый вал 7 первой рассматриваемой дифференциальной зубчатой передачи является ведущим дл второй зубчатой передачи, обеспечивающей привод первой печатной секции и ведущего вала третьей дифференциальной зубчатой передачи, в свою очередь, осуществляющей передачу движения, например, второй печатной секции и ведущему валу четвертой дифференциальной зубчатой передачи и т.д. Водило 18 посредством конических зубчатых слателлитов 19 передает вращение ведомым центральным зубчатым колесам 20 и 21. Движение от колеса 20 передается жестко связанному с ним коническому зубчатому колесу 22 и далее через конические зубчатые колеса 23 и вал 24 - печатному цилиндру 25. В паре с последним вращается формный цилиндр 26. Подключение других секций к приводу аналогично описанным выше. В случае применения данного привода для мащин с большим количеством секций и для мащин большого формата необходима для разгрузки привода передачи движения не от одного, а от нескольких электродвигателей. Подсоединение таких секционных электродвигателей, например 2,осуществляется к ведущему валу дифференциальной передачи, как показано на фиг. 1, через щестерни 28. Подсоединение секций (печатных и фальцевальных) к приводу производится через муфты 29, позволяющие осуществлять комбинирование количества участвующих в работе секций. При отключении какой-либо секции связь между оставшимися секциями может осуществляться, например, путем жесткого закрепления сателлитов на соответствующем во диле или использования сцепной муфты между водилом и валом ведомого центрального колеса дифференциальной передачи отключаемой секции, сообщающего движение следующей секции (не показаны). Применение дифференциальных передач для привода печатных и фальцевальных секций, управляемых автоматической системой продольной приводки посредством исполнительных устройств, например, электромагнитных тормозов, выполненных в виде электромагнитных порошковых муфт, позволяет регулировать относительное положение рабочих органов указанных секций (формных и фальцевальных цилиндров) путем регулирования моментов сопротивления (тормозных моментов), приложенных к этим органам. Величина тормозного момента определяется автоматической системой управления продольной приводкой (фиг. 3). В этой автоматической системе сигналы, - получаемые (и преобразуемые) от датчиков угла поворота 33 (фиг. 1 и 2) и 43 (фиг. 3) формных и фальцевальных цилиндров (индуктосинов) -ДТ, от датчиков их угловой скорости 34 (фиг. 1 и 2) - тахогенераторов датчиков натяжения 37 (фиг. 1) запечатываемой ленты (пьезоэлектрическщх датчиков давления) - Л F, а также от фотоэлектрических датчиков, фиксирующих положение контрольных меток на запечатываемой ленте - Д1, откладываются на сумматоре 47 (фиг. 3) и преобразуются в управляющее воздействие - напряжение питания катушки электромагнитной муфты 38. В результате действия тормозных моментов со стороны электромагнитных муфт на соответствующие формные и фальцевальные цилиндры происходит перераспределение крутящих мо.ментов на ведомых звеньях дифференциальных передач, связанных с рабочими органами на входах печатных и фальцевальных аппаратов (с печатными и рубящими цилиндрами соответственно), а через них и с рабочими органами на выходах этих аппаратов, т.е. с формными и фальцевальными цилиндрами соответственно, в результате чего изменяется относительное положение этих цилиндров, а значит, осуществляется регулирование продольной приводки. Таким образом, в данной систе.ме продольной приводки управляющее воздействие на исполнительные органы - электромагнитные тормоза вырабатывается не только за счет учета (измерения) отклонения в совмещении красок в многокрасочных оттисках, но и за счет учета отклонений в движении рабочих органов печатных и фальцевальных аппаратов и запечатываемой ленты (фазовые рассогласования формных и фаЛьцевальных цилиндров, отклонения угловых скоростей этих цилиндров друг от друга и натяжения запечатываемой ленты перед ними), особенно заметно проявляющихся в переход.ные режимы работы машины.
Использование предлагаемого устройства управления продольной приводкой обеспечивает учет большого количества параметров, характеризуюц-1их относительное положение рабочих органов печатных и фальцевальных аппаратов, а также изображения на запечатываемой ленте относительно этих цилиндров, увеличение быстродействия и точности отработки сигналов, фиксирующих отклонения этих положений, исключение влияния зазоров в передачах к рабочим органам печатных и фальцевальных аппаратов, поддержание постоянных крутящих моментов в передачах к рабочим органам печатных и фальцевальных аппаратов. Последнее достигается как при установившемся, так и при переходных режимах работы приводов совместно с автоматической системой управления продольной приводкой благодаря фиксации датчиками соответствующих параметров, характеризующих взаимосвязанное поведение приводов и зaпeчaтывae ioй ленты, и отработке их отклонения путем перераспределения автоматической системой и дифференциальным замкнутым приводом нагрузки, действующей на печатные и фальцевальные аппараты таким образом, что относительное положение формных, фальцевальных цилиндров и запечатываемой ленты остается неизменным.
В случае при.менения многодвигательного привода рулонной ротационной машины привод печатных и фальцевальных секций, не связанных между собой механически (а возможно и лентоведущих цилиндров), может осуществляться от индивидуальных (секционных) электродвигателей также при помощи дифференциального .механизма.
В приводе (фиг. 4) вращение от секционного электродвигателя 2 передается через зубчатую передачу 49 на водило 50 с сателлитами 51 дифференциальной зубчатой передачи. От водила осуществляется передача движения дву.мя ведомыми центральными колесами 52 и 53 по двум ветвям дифференциального привода. Первая ветвь состоит из передач, составленных из зубчатых колес 52, 54 и 55 и предназначенных для привода рабочих органов печатной пары. Вторая ветвь содержит коническое колесо 53, соединенное валом с ротором 56
электрогенератора. При этом со стороны ротора 56 электрогенератора на ведомое зубчатое колесо 53 действует реактивный момент, являющийся опорным моментом для
данного привода. Управление продольной приводкой осуществляется как изменением сопротивления внешней цепи при помощи автоматической системы управления, вследствие чего изменяется опорный момент на колесе 53, а значит и на колесе 55, так и тормозного момента на валу формного цилиндра 26 при помощи электромагнитной муфты 38 (фиг. 2), а также совместным изменением этих параметров. При этом крутящие моменты, действующие на привод формных
2 (фальцевальных, лентоведущих) цилиндров в различных секциях, можно изменять при помощи автоматической системы таким образом, чтобы обеспечивать постоянное фазовое согласование формных (фальцевальных и лентоведуш.их) цилиндров как при
0 установившемся, так и при переходных режимах работы привода.
В устройстве, представленном на фиг. 5, автоматическая система управления продоль5 ной приводкой запечатываемой ленты посредством электромагнитных тормозных муфт 38- на валах формных и фальцевальных цилиндров и за счет использования секционных электродвигателей 2 с мягкой механической характеристикой обеспечивает
0 дифференцированное распредмение мощностей секционных электродвигателей по разным секция.м в зависимости от величин действующих на их рабочие органы сопротивлений, а вследствие этого регулирование относительного положения рабочих органов
печатных и фальцевальных аппаратов и запечатываемой ленты, необходимое для обеспечения заданного регистра. Для устойчивой работы электрического вала и снижения бросков тока при включении синхронизируе0 мых печатных и фальцевальных аппаратов перед их разгоном производится вспомогательная операция фазирования, при которой роторы секционных электродвигателей получают синфазное положение в пространстве. Описанные многосекционные машины с
5 многодвигательными системами электропривода, для обеспечения одинаковых законов движения рабочих органов, на входах печатных и фальцевальных аппаратов имеют между этими органами электрическую синхронную связь -: электрический вал.
Таким образом, использование предлагаемого устройства для управления продольной приводкой, основывающегося на использовании замкнутого привода с электрической синхронной связью - электрический
5 вал - на входе печатных и фальцевальных аппаратов (печатный и рубящий цилиндры, соответственно), и электрической связью посредством электромагнитных муфт на выходе этих аппаратов (формный и фальцевальный цилиндры, соответственно), управляемых автоматической системой продольной приводки ленты, позволяет обеспечить точность и быстродействие фазирования формных и фальцевальных цилиндров, необходимого для обеспечения требуемого регистра при любых режимах работы печатных машин. Этим обеспечивается точность продольной
приводки запечатываемой ленты, а значит, повышение качества многокрасочной печати, фальцовки и рубки ленты.
Замена механической связи между секциями (печатными и фальцевальными аппаратами) машины значительно упрощает конструкцию привода машины, уменьшает его металлоемкость и улучшает обслуживание.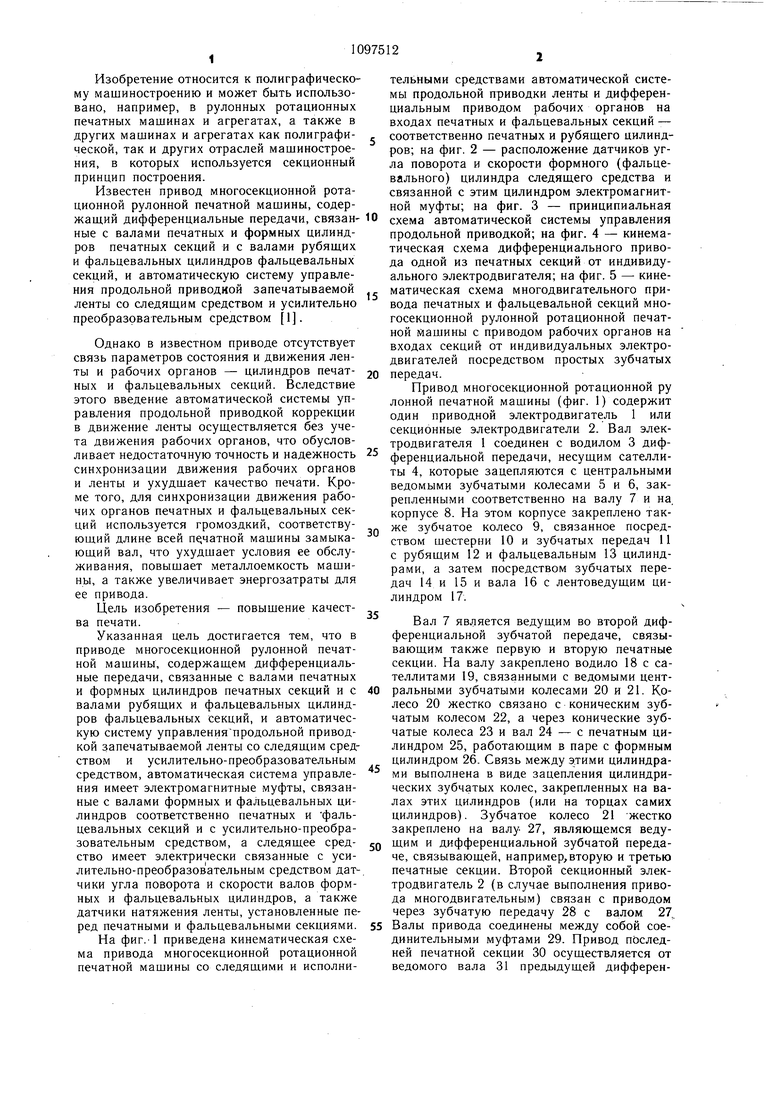


ПРИВОД РУЛОННОЙ МНОГОСЕКЦИОННОЙ РОТАЦИОННОЙ ПЕЧАТНОЙ МАШИНЫ, содержащий дифференциальные передачи, связанные с валами печатных и формных цилиндров печатных секций и d валами рубящих и фальцевальных цилиндров фальцевальных секций, и автоматическую систему управления продольИг / feZ-)) (Л со сд го ной приводкой запечатываемой ленты со следящим средством и усилительно-преобразовательным средством, отличающийся тем. что, с целью повыщения качества печати, автоматическая система управления имеет электромагнитные муфты, связанные с валами формных и фальцевальных цилиндров соответственно печатных и фальцевальных секций и с усилительно-преобразовательным средством, а следящее средство имеет электрически связанные с усилительно-преобразовательным средством датчики угла поворота и скорости валов формных и фальцевальных цилиндров, а также датчики- натяжения ленты, установленные перед печатными и фальцевальными секциями.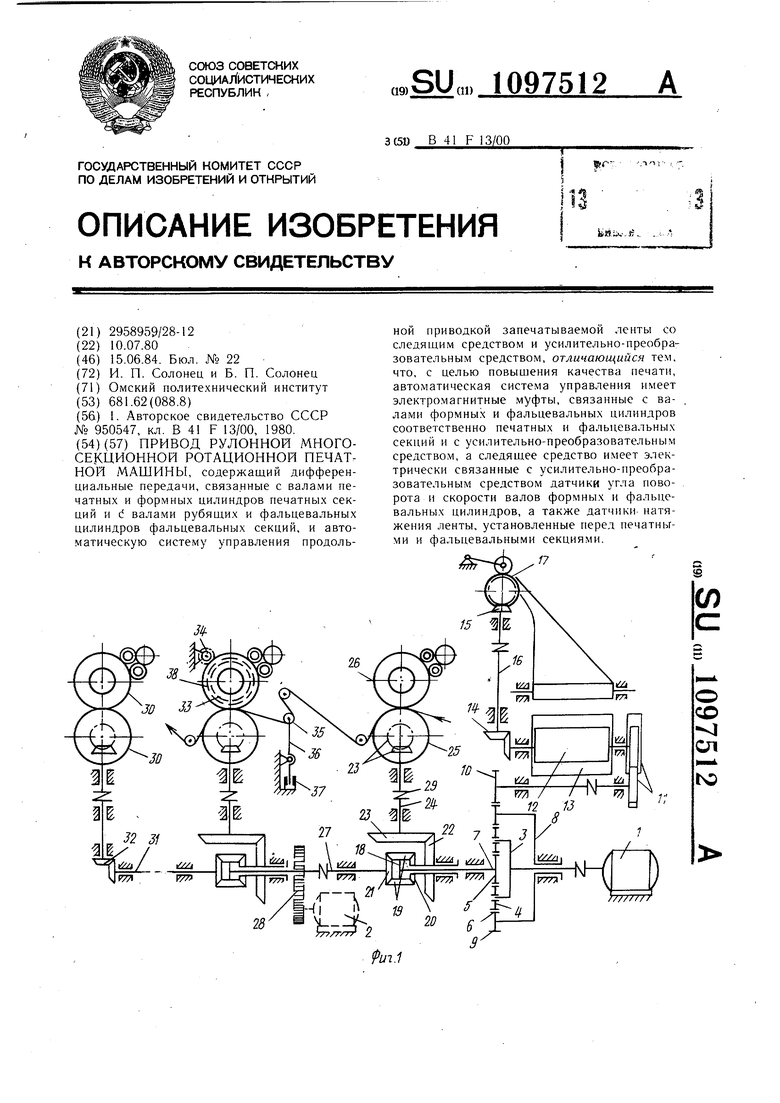
-Ш
ы
3S
.3
Фиг.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Привод многосекционной ротационной печатной машины | 1980 |
|
SU950547A1 |
| Механический грохот | 1922 |
|
SU41A1 |
