ва обоих блоков управления снабжены дополнительно датчиками ускорения, кинематически связанными с формными цилиндрами печатных апнаратов и с фальиевальньм цилиндром фальцевальной секции и электрически связанными с соответствующими сумматорами, 3, Привод по HU.I. и 2, о т л и- ч а m ш и и с я тем, что количество
Изобретение относится к полиграфическому производству, в частности к многосекционным ротационным печатным машинам двухсторонней многокрасочной печати,
Педью изобретения является повышение точности согласования движений цилиндров секций машины многокрасочной двухсторонней печати и обрабатываемой ленты.
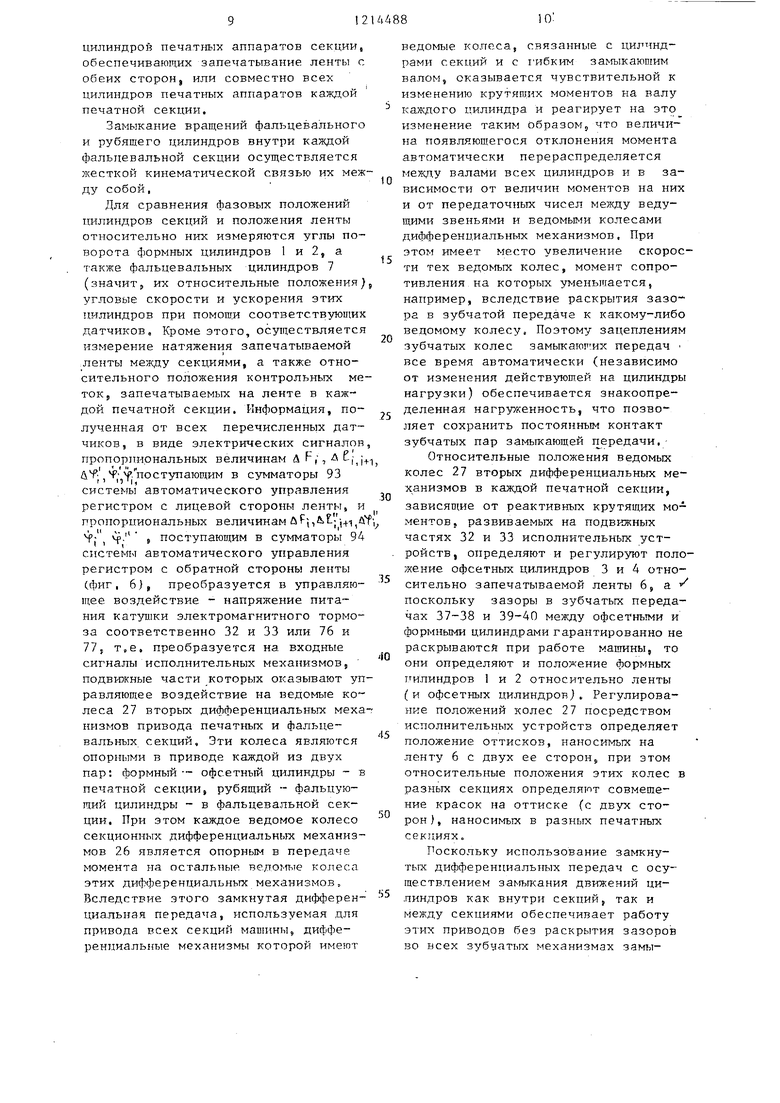
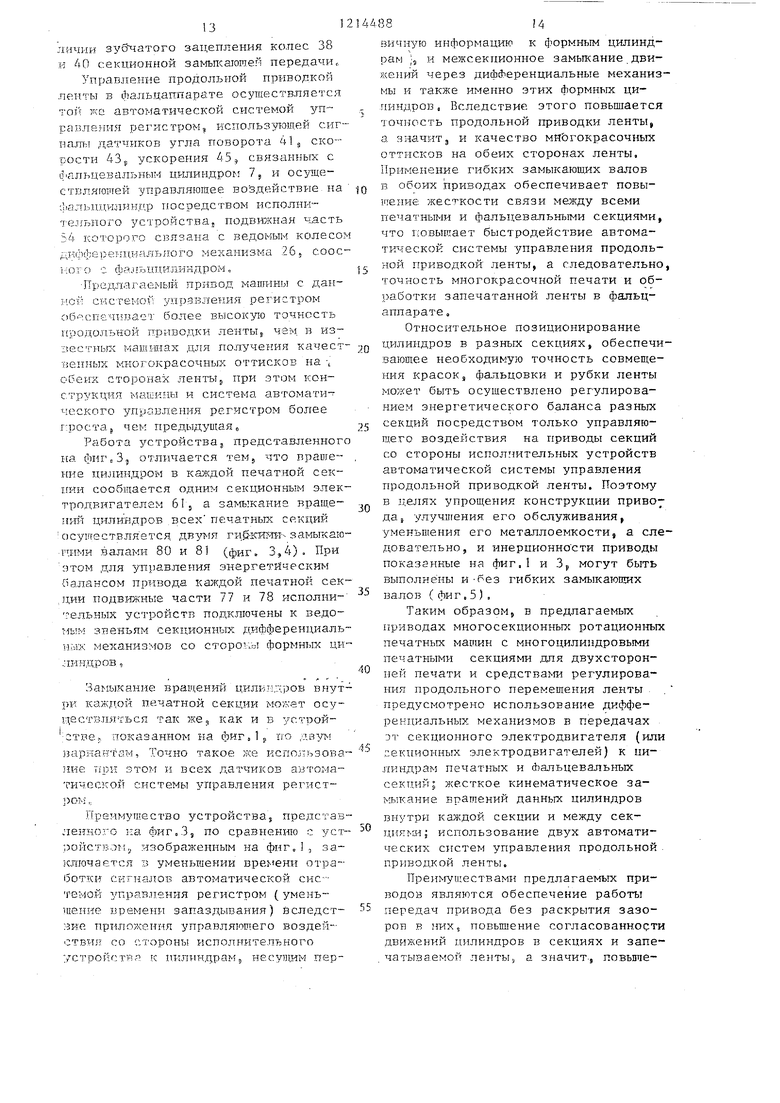
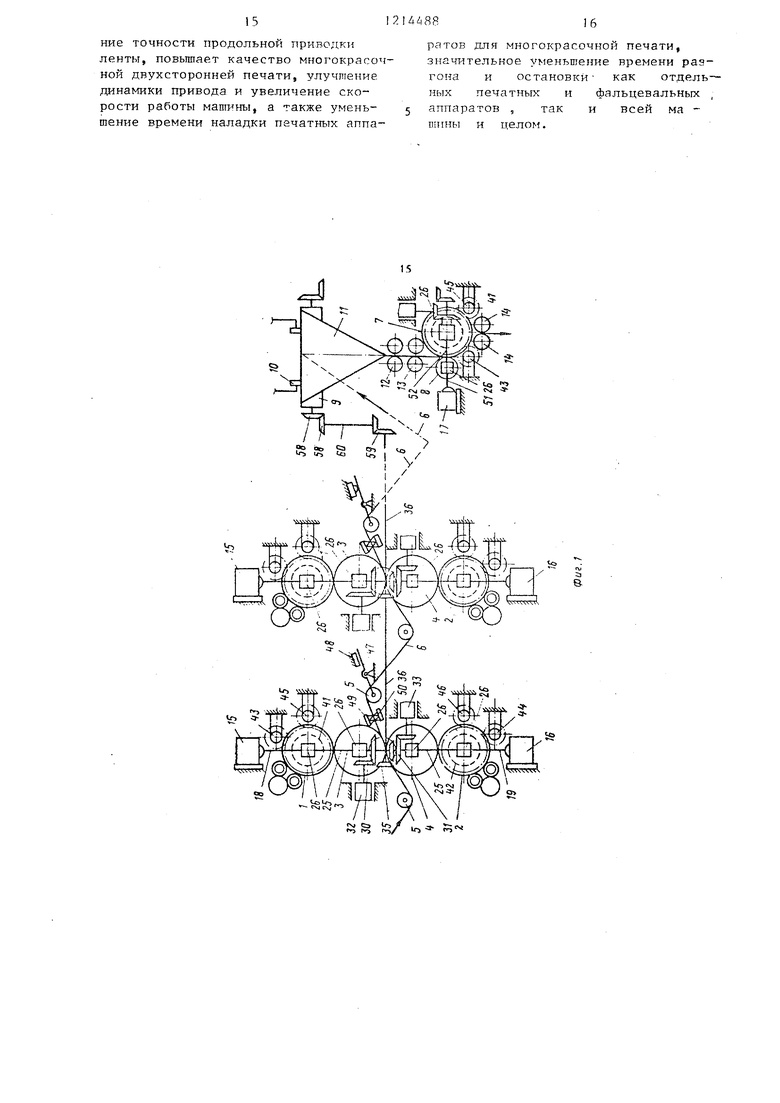
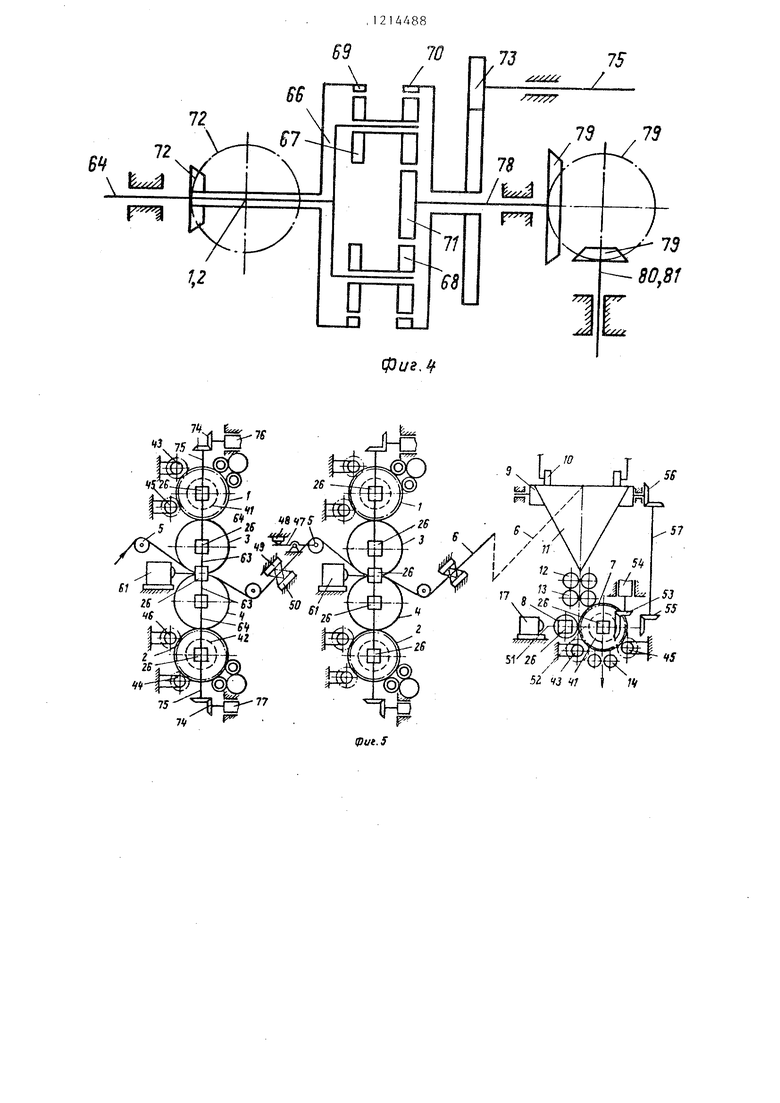
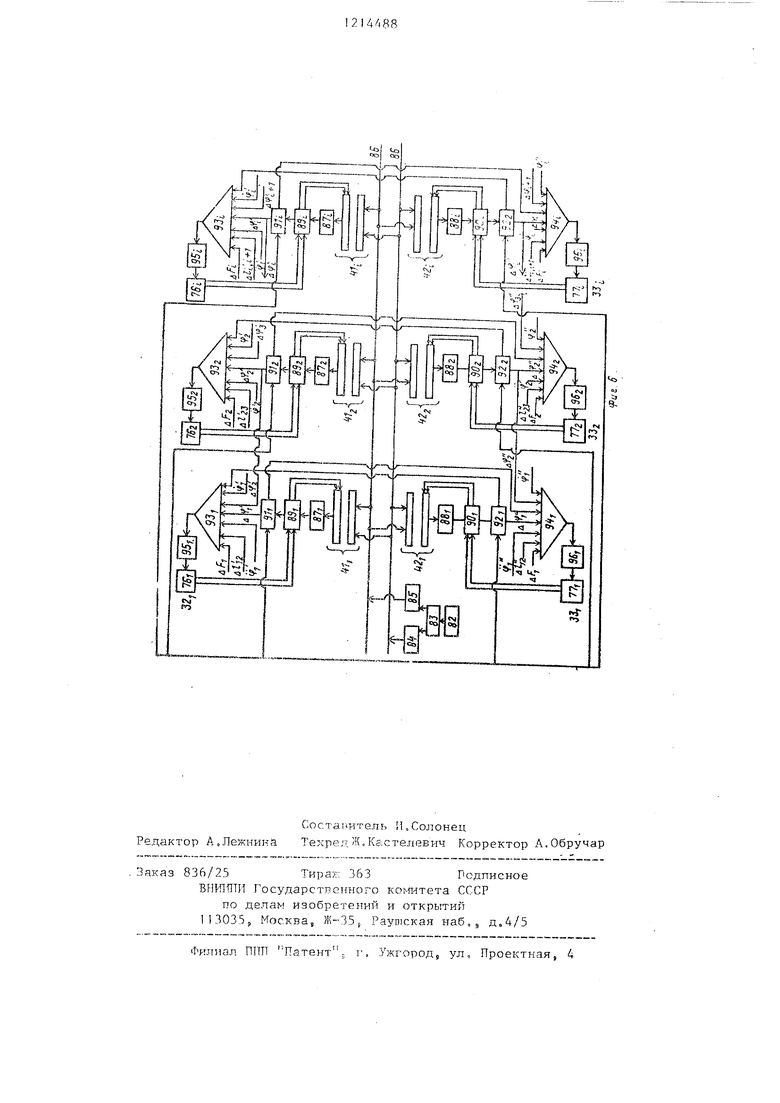
На фиг, 1 и 2 представлены соответственно первый вариант схемы привода офсетной ротационной рулонной печатной машины для двухсторонней многокрасочной печати с четырехпи- линдровыми печатными секциями и схема привода ее печатной секции; на фиг, 3 и 4 - соответственно второй вариант схемы привода указанной печатной машины и схема межсекционного диф4№ренциального механизма этого привода5 на фиг. 5 третий вариант исполнения схемы привода этой же машины; на фиг, 6 - принципиальная схема автоматической системы управления продольной приводкой ленты.
Привод рулонной ротационной печатной машины со средствами регулирования продольного перемещения зл- цечатываемой ленты связан (фиг.1) с двумя формными 1 и 2 и двумя офсетными 3 и 4,цилиндрами в каждой печатной секции,при этом между секциями размещены валики 5 для проводки ленты 6 запечатываемого материала, а также - с фальцевапьныг- 7, рубящим. 8, лентоведушим 9, взаимодей- ствуюшим с пp шимны ш роликами 10 цилиндрами фальцевальной секции, при этом между цилиндром 9 н парой пилтшдрсв / и В по ходу двтгаения
14488
секционных электродвигателей в каждой печатной секции равно количеству печатных аппаратов, входящих в нее.
4. Привод по пп,1-3, отличающийся тем,, что замыкающее средство выполнено в виде электрических связей между сумматорами обоих блоков управления.
ленты размеш.ены фальцворонка 1, направляюш,ие 12 и обжимные 13 валики, а после цилиндров 7 и 8 - фальцующие валики 14, Кроме того, привод содержит по два секционных электродвигателя 15 и 16 в каждой печатной секции и один электродвигатель 17 в фальцевальной секции.
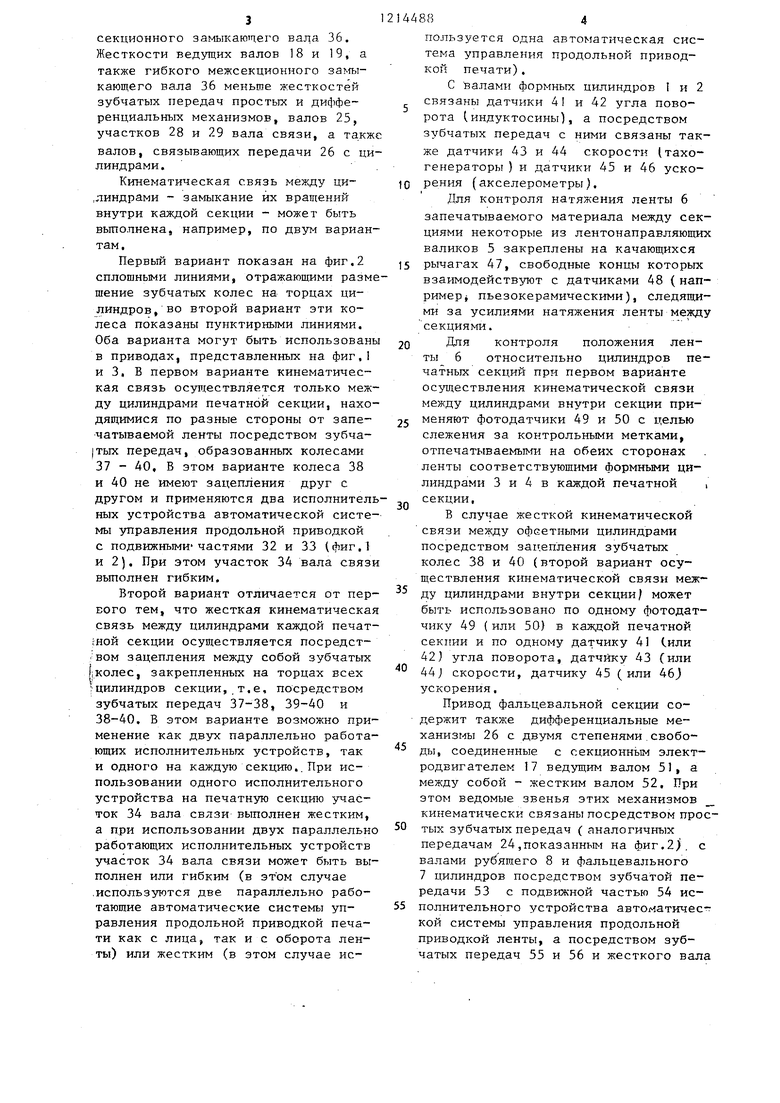
Электродвигатели 15 и 16 в печатных секциях посредством ведуш;их валов 18 и 19 соответственно соединены с ведущими звеньями - водилами 20 (фиг,2) первых дифференциальных механизмов с двумя степенями свободы - на входах в секции со стороны формных цилиндров 1 и 2, Сателлиты 21, размещенные на водилах 20, имеют зубчатые зацепления с ведомыми колесами 22 и 23. Колеса 22 посредством простых зубчатых передач 24 связаны с валами формных цилиндров I и 2, а колеса 23 посредством жестких валов 25 связаны с ведутдими звеньями вторых дифференциальных механизмов также с двумя степенями свободы, которые вместе с простыми передачами 24 к валам цилиндров условно обозначены позипией 26. Ведомые колеса 27 вторых дифференциальных механизмов соединены жесткими участками 28 и
29вала связи и зубчатыми передачами
30и 31 с подвижными частями соотве-г- ственно 32 и 33 исполнительных устройств автоматической системы управления регистром, например электромагнитной порошковой муфты. Жесткие участки 28 и 29 соединены между собой участком 34 вала связи, Участки 34 в каждой печатной секции связаны между собой посредством простых зубчатых передач 35 и гибкот О межсекционного замыкаго дего вала 36. Жесткости ведущих валов 18 и 19, а также гибкого межсекционного замыкающего вала 36 меньше жесткостей зубчатых передач простых и дифференциальных механизмов, валов 25, участков 28 и 29 вала связи, а такж
валов, связывающих передачи 26 с цилиндрами,
Кинематическая связь между ци- .линдрами - замыкание их вращений внутри каждой секции - может быть вьтолнена, например, по двум вариантам.
Первый вариант показан на фиг.2 сплошными линиями, отражающими размещение зубчатых колес на торцах цилиндров, во второй вариант эти колеса показаны пунктирными линиями. Оба варианта могут быть использованы в приводах, представленных на фиг.I и 3, В первом варианте кинематическая связь осурдествляется только между цилиндрами печатной секции, находящимися по разные стороны от запе- чатываемой ленты посредством зубча- |тых передач, образованных колесами 37 - ДО, В этом варианте колеса 38 и 40 не имеют зацепления друг с другом и применяются два исполнительных устройства автоматической системы управления продольной приводкой с ПОДВИЖНЫМИ частями 32 и 33 (фиг.1 и 2), При этом участок 34 вала связи вьтолнен гибким.
Второй вариант отличается от первого тем, что жесткая кинематическая связь между цилиндрами каждой печат- шой секции осуществляется посредст- .вом зацепления между собой зубчатых |колес, закрепленных на торцах всех ;цилиндров секции, т.е, посредством зубчатых передач 37-38, 39-40 и 38-40. В этом варианте возможно применение как двух параллельно работающих исполнительных устройств, так и одного на каждую секцию.. При использовании одного исполнительного устройства на печатную секцию участок 34 вала связи выполнен жестким, а при использовании двух параллельно работающих исполнительных устройств участок 34 вала связи может быть выполнен или гибким (в этом случае .используются две параллельно работающие автоматические системы управления продольной приводкой печати как с лица, так и с оборота ленты) или жестким (в этом случае ис25
144884
пользуется одна автоматическая система управления продольной приводкой печати).
С валами формных цилиндров I и 2 связаны датчики 4I и 42 угла поворота tиндуктосины), а посредством зубчатых передач с ними связаны также датчики 43 и 44 скорости (тахо- генераторы } и датчики 45 и 46 уско10 рения (акселерометры).
Для контроля натяжения ленты 6 запечатываемого материала между секциями некоторые из лентонаправляющих валиков 5 закреплены на качающихся
15 рычагах 47, свободные концы которых взаимодействуют с датчиками 48 ( например j пьезокерамическими), следящими за усилиями натяжения ленты между секциями.
2Q Для контроля положения ленты 6 относительно цилиндров печатных секций при первом варианте осуществления кинематической связи между цилиндрами внутри секции применяют фотодатчики 49 и 50 с целью слежения за контрольными метками, отпечатываемыми на обеих сторонах ленты соответствующими формными цилиндрами 3 и 4 в каждой печатной , секции,
В случае жесткой кинематической связи между офсетньгми цилиндрами посредством зацепления зубчатых колес 38 и 40 (второй вариант осуществления кинематической связи между цилиндрами внутри секции/ может быть использовано по одному фотодатчику 49 (или 50) в каждой печатной секции и по одному датчику 41 (,или 42) угла поворота, датчику 43 (или 44J скорости, датчику 45 (или 46 ускорения.
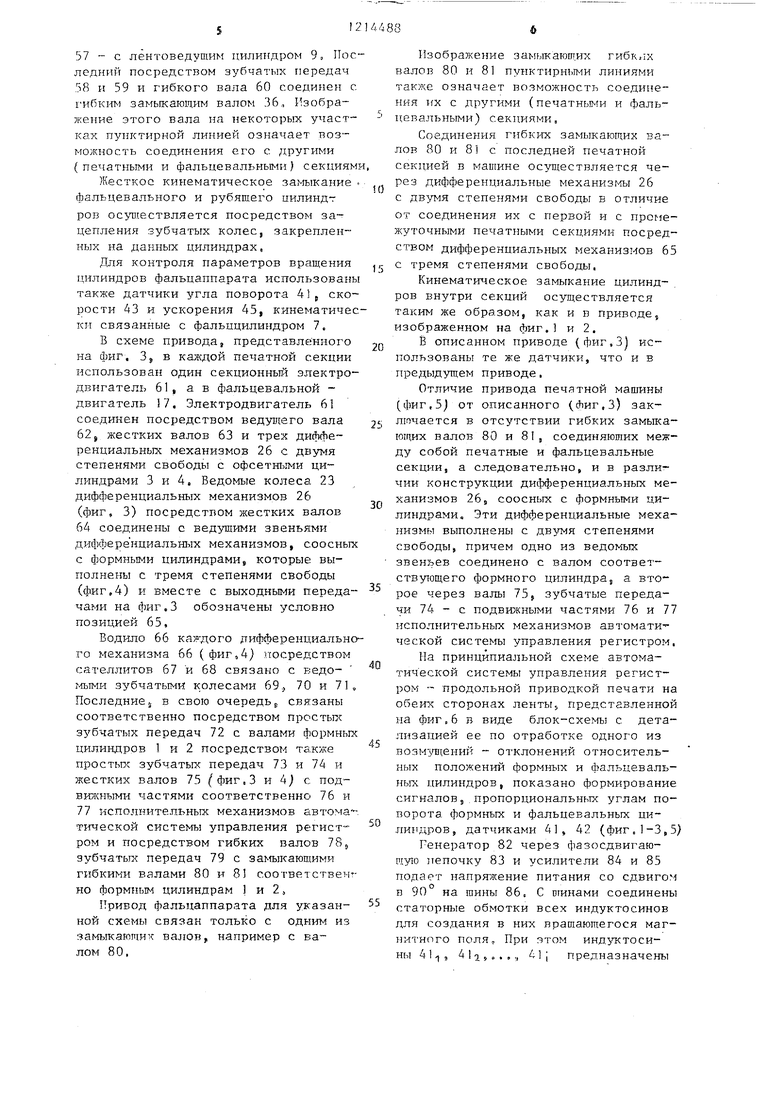
Привод фальцевальной секции содержит также дифференциальные механизмы 26 с двумя степенями.свободы, соединенные с секционном электродвигателем 17 ведущим валом 51, а между собой - жестким валом 52, При этом ведомые звенья этих механизмов кинематически связаны посредством простых зубчатых передач ( аналогичных передачам 24,показанным на фиг.2). с валами рубящего 8 и фальцевального 7 цилиндров посредством зубчатой передачи 53 с подвижной частью 54 ис55 полнительного устройства автоматичес кой системы управления продольной приводкой ленты, а посредством зубчатых передач 55 и 56 и жесткого вала
30
35
40
45
50
57 с лёнтоведупщм цилиндром 9, Пос ледг{ий посредством зубчатых передач
58и 59 и гибкого вала 60 соединен с гибким замыкающим валом 36„ Изобра- 7кение этого вала на некоторых участках пунктирной линией означает возможность соединения его с другими (печатными и фальцевальными) секциям
Жесткое кинематическое за -гыкание фальцевального и рубяшего иилинд-г ров осутнествляется посредством за- цепления зубчатых колес, закрепленных на данных цилиндрах.
Для контроля параметров вращения цилиндров фальцаппарата использованы также датчики угла поворота 41, скорости 43 и ускорения 45, кинематически связанные с фальццилиндром 7.
В схеме привода, представленного на фиг. 3, в каждой печатной секции использован один секционньш электродвигатель 61, а в фальцевальной двигатель 17. Электродвигатель 61 соединен посредством ведутлего вала 62J жестких валов 63 и трех дифференциальных механизмов 26 с двумя степенями свободы с офсетш 1ми цилиндрами 3 и 4. Ведомые колеса 23 дифференциальных механизмов 26 (фиг, 3) посредством жестких валов 64 соединены с ведущими звеньями диффере нциальных механизмов, соосных с формными цилиндрамие которые выполнены с тремя степенями свободы (фиГе4) и вместе с выходными передачами на фиг,3 обозначены условно позицией 65,
Водило 66 каждого дифференциального механизма 66 (фиг„4) посредством сателлитов 67 и 68 связано с ведомыми зубчатыми колесами 69,, 70 и 71, ПоследниеJ в свою очередь связаны соответственно посредством простьп : зз бчатых передач 72 с валами формных цилиндров 1 и 2 посредством также простьо;: зубчатых передач 73 и 74 и жестких валов 75 (фиг.З и 4 с подвижными частями соответственно 76 и 77 исполнительньпс механизмов автома тической системы управления регистром и посредством гибких валов 785 зубчатых передач 79 с замыкающими гибкими валами 80 и 81 соответствент но формным цилиндрам ) и 2,
Привод фальцаппарата для указанной схемы связан только с одним из замыкающих валов, например с Eia- лом 80.
o
0
0
5
5
0
5
Изображение зaм JIкaюш,иx валов 80 и 81 пунктирными линиями также означает возможность соединения Tfx с другими (печатньми и фальцевальными) секциями,
Соединения гибких замыкающих валов 80 и 81 с последней печатной секцией в машине осуществляется через дифференциальные механизмы 26 с двумя степенями свободы в отличие от соединения их с первой и с промежуточными печатными секциями посредством дифференциальных механизмов 65 с тремя степенями свободы,
Кинематическое замыкание цилиндров внутри секций осуществляется таким же образом, как и в приводе, изображенном на фиг. и 2.
В описанном приводе (фиг.З использованы те же датчики, что и в предыдущем приводе,
Отличие привода печатной машины (фиг,5) от описанного (Лиг.З) заключается в отсутствии гибких замыка- ющик валов 80 и 81, соединяющих между собой печатные и фальцевальные секции, а следовательно, и в различии конструкции дифференциальных механизмов 26, соосных с формными цилиндрами. Эти дифференциальные механизмы выполнены с двумя степенями свободы, причем одно из ведомых звеньев соединено с валом соответствующего формного цилиндра, а второе через валы 75, зубчатые передачи 74 - с подвгокными частями 76 и 77 исполнительных механизмов автоматической системы управления регистром.
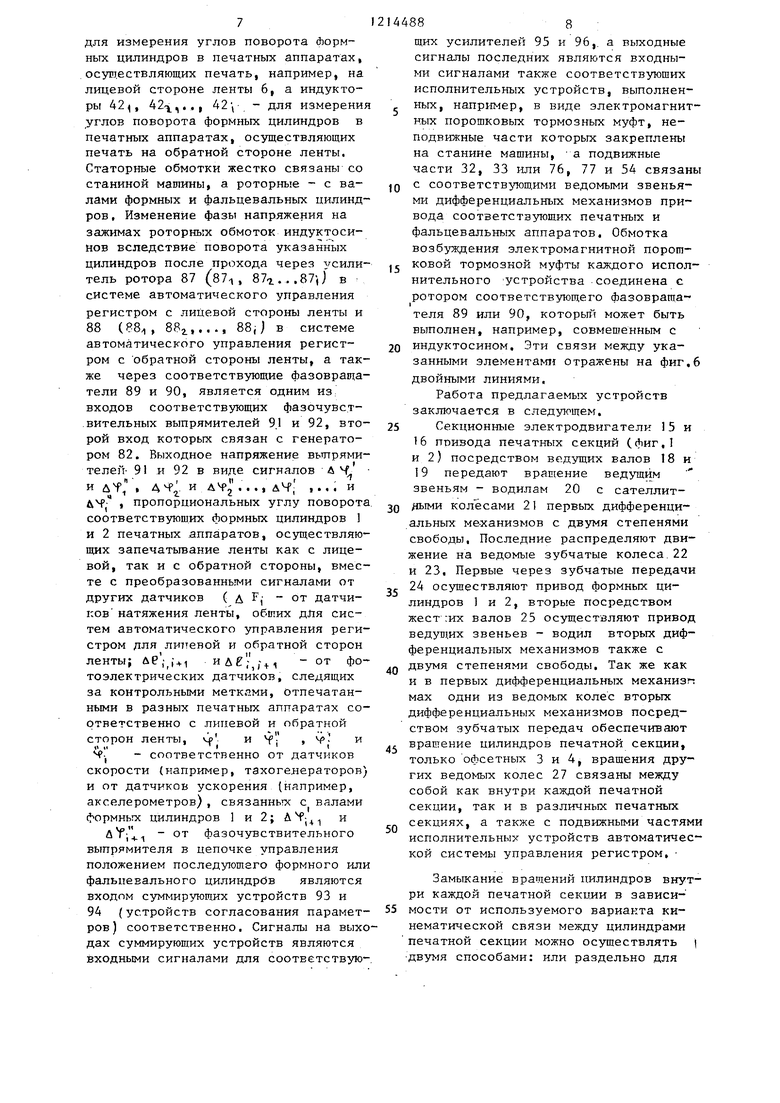
На принципиальной схеме автоматической системы управления регистром продольной приводкой печати на обеих сторонах ленты, представленной на фиг.6 в виде блок-схемы с детализацией ее по отработке одного из возм;;лцений - отклонений относительных положений формных и фальцеваль- нь,гк цилиндров, показано формирование сигналов 3.пропорциональных углам поворота формных и фальцевальных цилиндров, датчиками 41, 42 (фиг.1-3,5)
Генератор 82 через фазосдвигаю- щую непочку 83 и усилители 84 и 85 подает напряжение питания со сдвигом в 90 на щины 86, С вгинами соединены статорные обмотки всех индуктосинов для создания в них нрашающегося магнитного поля. При этом индз ктоси- ны 4 Ц, .,, 41I предназначены
7
для измерения углов поворота формных цилиндров в печатных аппаратах, осушествляющих печать, например, на лицевой стороне ленты 6, а индукторы 42, ,.., 42 - для измерения углов поворота формных цилиндров в печатных аппаратах, осуществляющих печать на обратной стороне ленты, Статорные обмотки жестко связаны со станиной машины, а роторные - с валами формных и фальцевальных цилиндров , Изменение фазы напряжения на зажимах роторных обмоток индуктоси- иов вследствие поворота указанных цилиндров после прохода через усилитель ротора 87 (87i , 87.,.87(j в системе автоматического управления регистром с лицевой стороны ленты и 88 (88, 882.,..., 88; j в системе автоматического управления регистром с обратной стороны ленты, а также через соответствующие фазовращатели 89 и 90, является одним из, входов соответствующих фазочувст- вительных выпрямителей 9.1 и 92, второй вход которых связан с генератором 82. Выходное напряжение вьтрями- телей- 91 и 92 в виде сигналов Ч, и д , АЧ. и .. .. ДЧ, ,... и ikM - t пропорциональных углу поворота соответствзпющих формных цилиндров 1 и 2 печатных .аппаратов, осуществляющих запечатьтание ленты как с лицевой, так и с обратной стороны, вместе с преобразованными сигналами от других датчиков ( Д F,- - от датчиков натяжения ленты, общих для систем автоматического управления регистром для ли7тевой и обратной сторон ленты; де ;,Ч1 , - от фотоэлектрических датчиков, следящих за контрольными метками, отпечатанными в разных печатных аппаратах соответственно с лииевой и обратной сторон ленты, и f , V- и - соответственно от датчиков скорости (например, тахогенераторов) и от датчиков ускорения (например, акселерометров), связанных с валами формных цилиндров 1 и 2; AY., и
дУ; - от фазочувствительного выпрямителя в цепочке управления положением последующего формного или фальцевального цилиндр 5в являются входпм суммирующих устройств 93 и 94 (устройств согласования параметров ) соответственно. Сигналы на выходах суммирующих устройств являются входными сигналами для соответствую144888
щих усилителей 95 и 96,. а выходные сигналы последних являются входными сигналами также соответствующих исполнительных устройств, выполнен- - ных, например, в виде электромагнитных порошковых тормозных муфт, неподвижные части которых закреплены на станине мащины, -а подвижные части 32, 33 или 76, 77 и 54 связаны JQ с соответствующими ведомыми звеньями дифференциальных механизмов привода соответствующих печатных и фальцевальных аппаратов. Обмотка возбуждения электромагнитной порот- 1 ковой тормозной муфты каждого исполнительного устройства соединена с ротором соответствующего фазовращателя 89 или 90, которьш может быть выполнен, например, совмещенным с 20 индуктосином. Эти связи между указанными элементами отражены на фиг,6 двойными линиями.
Работа предлагаемых устройств заключается в следующем, 25 Секционные электродвигатели 15 и 16 привода печатных секций (фиг,1 и 2) посредством ведущих валов 18 и 19 передают вращение ведущим звеньям - водилам 20 с сателлит- 30 дьгми колесами 21 первых дифференциальных механизмов с двумя степенями свободы. Последние распределяют движение на ведомые зубчатые колеса.22 и 23, Первые через зубчатые передачи ,, 24 осуществляют привод формных цилиндров 1 и 2, вторые посредством жест :их валов 25 осуществляют привод ведущих звеньев - водил вторых дифференциальных механизмов также с дд двумя степенями свободы. Так же как и в первых дифференциальных механизп мах одни из ведомых колес вторых дифференциальных механизмов посредством зубчатых передач обеспечивают ., вращение цилиндров печатной секции, только офсетных 3 и 4, вращения дру гих ведомых колес 27 связаны между собой как внутри каждой печатной секции, так и в различных печатных секциях, а также с подвижными частями исполнительных устройств автоматической системы управления регистром,
Замыкание вращений цилиндров внутри каждой печатной секции в зависи- 55 мости от используемого варианта кинематической связи между цилиндрами печатной секции можно осуществлять | двумя способами: или раздельно для
ЦИЛИНДРО13 печатных аппаратов секции, обеспечивающих запечатывание ленты с обеих сторон, или совместно всех цилиндров печатных аппаратов каждой печатной секции.
Замыкание вращений фальцевального и рубящего цилиндров внутри каждой фальцевальной секции осуществляется жесткой кинематической связью их между собой,
Для сравнения фазовых положений цилиндров секций и положения ленты относительно них измеряются углы поворота формных цилиндров 1 и 2, а также фальцевальных цилиндров 7 (значит., их относительные положения) угловые скорости и ускорения этих цилиндров при помощи соответствующих датчиков. Кроме этого, осуществляется измерение натяжения запечатываемой ленты между секциями, а также относительного положения контрольных меток 5 запечатываемых на ленте в каждой печатной секции. Информация, полученная от всех перечисленньщ датчиков, в виде электрических сигналов пропорциональных величинам Д F-,, Л Lfj uVj, .поступаюсди } в сумматоры 93
системы автоматического управления регистром с лицевой стороны ленты, и
пропорциональных величинам uF ,,&tj i T uY YI, f. в поступающим в сумматоры 94 системы автоматического управления регистром с обратной стороны ленты (фиг, 6), преобразуется в управляю- щее воздействие - напряжение питания катутаки электромагнитного тормоза соответственно 32 и 33 или 76 и 77, т.е. преобразуется на входнъ е сигналы исполнительных механизмов, подвижные части которых оказывают управляющее воздействие на ведомые ко леса 27 вторых дифференци;1льньгх меха низмов привода печатных и фальцевальных секций. Эти колеса являются опорными в приводе каждой из двух пар: формный - офсетный цилиндры - в печатной секции, рубящий - фальцующий цилиндры - в фальцевальной секции. При этом каждое ведомое колесо секционных дифференциальнькх механизмов 26 является опорным в передаче момента на остальт1ые ведомьте колеса этих дифференциальных механизмов, Вследствие этого замкнутая дифферен- циальная передача, используемая для привода всех секций машины, диф|фе- ренциальные механизмы которой имеют
0
5
0
5
0
ведомые колеса, связанные с цилиндрами секций и с гибким замыкаюпшм валом, оказывается чувствительной к изменению крутящих моментов на валу каждого цилиндра и реагирует на это изменение таким образом, что величина появляющегося отклонения момента автоматически перераспределяется между валами всех цилиндров ив зависимости от величин моментов на них и от передаточных чисел между ведущими звеньями и ведомыми колесами дифференциальных механизмов, При этом имеет место увеличение скорости тех ведомых колес, момент сопротивления на которых уменьшается5 например, вследствие раскрытия зазо- ра в зубчатой нередаче к какому-либо ведомому колесу. Поэтому зацеплениям зубчатых колес замыкающих передач все время автоматически (независимо от изменения действующей на цилиндры нагрузки) обеспечивается знакоопре- деленная нагруженность, что позволяет сохранить постоянным контакт зубчатых пар замыкающей передачи,Относительные положения ведомых колес 27 вторых дифференциальных механизмов в каждой печатной секции, зависящие от реактивных крутящих моментов, развиваемых на подвижных частях 32 и 33 исполнительных устройств, определяют и регулируют положение офсетных цилиндров 3 и 4 относительно запечатываемой ленты 6, а поскольку зазоры в зубчатых передачах 37-38 и 39-40 между офсетными и формными цилиндрами гарантированно не раскрываются при работе машины, то они определяют и положение формных пилиндров 1 и 2 относительно ленты (и офсетных цилиндров). Регулирование положений колес 27 посредством исполнительных устройств определяет положение оттисков, наносимых на ленту 6 с двух ее сторон при этом относительные положения этих колес в разных секциях определяют совмещение красок на оттиске (с двух сторон), наносимых в разных печатных секциях.
Поскольку использование замкнутых дифференциальных передач с осуществлением замыкания движений цилиндров как внутри секцийJ так и между секциями обеспечивает работу этих приводов без раскрытия зазоров во всех зубуатьгх механизмах замыкаюмих передач привода машины, то оно обеспечивает точное выполнение всех команд автоматической системы управления регистром и устойчивое от нос ительное положение всех цилиндров в разных секциях при отработке внет- них возмущенийJ действующих на цилиндры печатных секций со стороны сил сопротивления красочных аппара- тов, в результате прерывистости натиска в контактных зонах цилиндров из-за наличия выемок на поверхностях цилиндров, а также со стороны запечатываемой ленты вследствие колеба- НИИ ее натяжения (а на цилиндры фальцевальных секций - силы сопротивления рубки ленты ножом рубящего цилиндра ) ,
Исполняющие устройства автомати- ческой системь управления регистром в данном приводе обеспечивают регулировку относительного положения цилиндров во всех секциях за счет силового воздействия с их сторон на привод цилиндров секции, это приводи к регулировке баланса сил, действующих на привод каждой секции, что обеспечивает отработку появляюиЧихся силовых возмущений, вызывающих нару- шения согласования движения цилиндров и ленты, и вследствие этого обеспечивает стабильность относительного положе1тя цилиндров и ленты при различных изменениях режимов работы печатной машины.
Использование в предлагаемом приводе печатной машины двух секционных электродвигателей для привода каждой печатной секции машины, гибкого замыкающего вала, связывающего внутренни цилиндры всех печатных секций между собой, а также двух исполнительных устройств автоматической системы, регулирующих нагруженность соответствующих частей печатных секций, размещенных по разные стороны от запечатываемой ленты, позволяет уменьшить мощность, потребляемую электродвигателями для привода цилиндров секций вследствие уменьшения количества передач и приводимых органов, приходящихся на каждый секционньш электродвигатель, а значит, уменьшения и потерь на их привод; умень- щить потребляемую энергию исполнительными устройствами, а значит, их габариты, что улучшит компоновку и
|Q ,g
20 5 п 5
0
5
0
уменьшит габариты машины в целом, а также обеспечить возможность независимой продольной приводки печати на обеих сторонах запечатываемой ленты, что повысит многокрасочную точность двухсторонней печати,
Управление продольной приводкой печати на обеих сторонах ленты может осуществляться при раздельной работе двух одинаковых систем управления регистром для обеих сторон ленты, осуществляемой при раздельном использовании фотодатчиков, расположенных по обе стороны запечатываемой ленты, следяш.им за контрольнь ми метками на них, при использовании раздельных датчиков угла поворота, скоростей и ускорений формных цилиндров 1 и 2, при использовании двух исполнительных устройств, подвижные части которых связаны с ведомыми колесами секционных дифференциальных механизмов, получающих привод от соответствующих секционных электродвигателей и при отсутствии связи между зубчатыми колесами 38 и 40 замыкающей передачи внутри печатных секций, а также при использовании гиб кого вала 34 связи между ведомыми колесами 27 дифференциальных механизмов привода обоих печатных аппаратов печатной секции. При этом для обеих автоматических систем управления используются одни, и те же датчики натяжения запечатываемой ленты. Применение предлагаемого привода с описанной вьше автоматической системой управления регистром обеспечивает нанбольщую высокую возможную точность продольной приводки ленты, ее стабильность при получении качественных многокрасочных оттисков на обеих сторанах ленты.
Управление продольной приводкой печати может осушествляться также и при использовании одной автоматической системы для обеих сторон ленты одновременно при использовании одних фотодатчиков, следящих за контрольными метками только на одной стороне ленты, одних датчиков угла поворота, скорости и ускорения соответственно oднoJo из формных цилиндров 1 или 2, а также при использовании одного или двух параллельно работающих исполнительных устройств, связан- ньгх жестким валом 34 связи и при на13
личии зубчатого зацепления колес 38 и 40 секционной замьпсагортей пефедачио
Управление нродольной нриводкой ленты в фальцаппарате осутествляется Toi i же автоматической системой управления регистром, ис1юльзуюш,ей сигналы датчиков угла новорота 41 скорости 435 ускорения 45, связанных с фальцевальным циливдрог.; 7, и осуществляющей управляющее воздействие на d а л ь 1ЩИЛ J- нд р н о с р еде ТВ ом и с полни- тельного устройства, нодвижная часть 54 которого связана с ведомым колесо дис 1фе ер:циал1,ного механизма 26 соос кого с фальидилиндром,
П-редлагаемый привод машингя с данной системой управления регистром С)б и;;печиваст более высокую точность нродольной приводки ленты, чем, в из- зестньш ма)дш-1ах для нолучения качест венных многокрасочных оттисков на обеих сторонах лентыj при этом конструкция Чагоины и система автомати ческого унравления регистром более г роста чем предыдущая „
Работа устройства, представлс нног на фиГвЗ, отличается тем, что враше- цилиндром в каждой печатной сек- НИИ сообщается одним секционным электродвигателем 615 а замыкание враще- iinfi цилиндров всех печатных секций осутествля ется, дв ьшя ги.б-ктгжт--замыкаю ними валами 80 и 81 (фиг 3,4). При этом для управления энергетйческт- балансом привода каждой печатной секции подвижньзе части 77 и 78 исполнительных устройств подключены к ведомым звеньям секционных дифференциальных механизмов со CTOpov: :r; формньк цилиндров,
Замыкание вращений цилинд юв внут тж каждой печатной секции мокет осу- цествляться так же, как и в устрой- ствв;, показанном на фиг.1 по дву вариантам. Точно такое же кспол ьзова лие нрн этом н всех датчиков автоматической системы управления регист- ;)ом,;
Преимушество устройства, представ леннС ГО ма. фиг.З, по сравнению с уст ройствог;, изображенным на фиг, I - заключается 3 уменьшении Bpeh eHH отра- боткк сигналов автоматической сие- ге1-5ой управ.нения регистром ( уменьшение времени запаздывания) вследст- ;5ие нрт5ло}кення унравляютего воздействия со сторонь исполнительного устройства к ттклиндрам, несуящн пер
к формным цилиндвичную информацию оам
5
Q
и межсекционное замыкание.движений через дифб еренциальные механизмы и также именно этих формных цилиндров , Вследствие этого повьшается точность продольной приводки ленть, а значит, и качество мнЬгокрасочных оттисков на обеих сторонах ленты. Применение гибких замыкающих валов в обоих приводах обеспечивает повы- 1 1ение жесткости связи между всеми печатными и фалытевапьными секциями, что повышает быстродействие автома- ти -теской системы управления продольной приводкой ленты, а следовательно, точность многокрасочной печати и обработки запечатанной ленты в фальцаппарате ,
Относительное позиционирование цилиндров в разных секциях, обеспечивающее необходимую точность совмещения красок, фальцовки и рубки ленты может быть осуществлено регулированием энергетического баланса разных г секций посредством только управляющего воздействия на приводы секций со стороны исполнительных устройств автоматической системы управления нродольной приводкой ленты. Поэтому в целях упрощения конструкции привода, улучшения его обслуживания, уменьщения его металлоемкости, а следовательно, и инерционно сти приводы показанные на фиг,1 и Зр могут быть выполнены и-без гибких замыкающих валов ( фиг,5),
Таким образом, в предлагаемых приводах многосекционньпс ротацион1-1ьгх печатных машин с многоцилиндровыми печатными секциями для двухсторонней печати и средствами регулирования продольного перемещения ленты предусмотрено использование дифференциальных механизмов в передачах эт секционного электродвигателя (или г.екнионнь х электродвигателей) к цилиндрам печатных и Фальцевальных секций; жесткое кинематическое замыкание вратений данных цилиндров внутри каждой, секции и между сек- использование двух автоматических систем унравления продольной нриводкой ленты.
Преи гуп;ествами предлагаемых приводов являются обеспечение работы передач привода без раскрытия зазо- рон в них, повьш1ение согласованности движений цилиндров в секциях и запечатываемой ленты, а значит, повыгае0
5
0
5
0
5
ние точности продольной приводки ленты, повышает качество многокрасочной двухсторонней печати, улучшение динамики привода и увеличение скорости работы машины, а также уменьшение времени наладки печатных аппаратов для многокрасочной печати, значительное уменьшение времени разгона и остановки- как отдельных печатньк и фальцевальных , аппаратов , так и всей ма - типы и целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод рулонной многосекционной ротационной печатной машины | 1980 |
|
SU1097512A1 |
| Привод печатной машины со средствами для регулирования продольного перемещения ленточного материала | 1980 |
|
SU1000293A1 |
| Привод многосекционной ротационной печатной машины | 1980 |
|
SU950547A1 |
| Привод многосекционной ротационной печатной машины | 1982 |
|
SU1134383A1 |
| Многосекционная ротационная печатная машина | 1989 |
|
SU1770154A1 |
| Трафаретное печатное устройство (его варианты) | 1981 |
|
SU1100137A1 |
| МНОГОЦИЛИНДРОВЫЙ ПЕЧАТНЫЙ АППАРАТ ОФСЕТНОГО ГАЗЕТНОГО АГРЕГАТА | 1991 |
|
RU2030295C1 |
| Многосекционная рулонная ротационная печатная машина | 1987 |
|
SU1560436A1 |
| Устройство для проводки бумажной ленты через печатные секции рулонной ротационной печатной машины | 1981 |
|
SU1227502A1 |
| Привод многосекционной ротационной печатной машины | 1985 |
|
SU1348219A2 |
VVt N
/Ь-|г За . Сгч г
У
а
е.
10
1
SB
25
S SI W wrH
Фиг,
7tf L ,- 3 75.dl-D
757«
-..--. fcaay
-O-pw
л-Ь
ril.x
fS
| Привод печатной машины со средствами для регулирования продольного перемещения ленточного материала | 1980 |
|
SU1000293A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
