Устройство, относится к машиностроению, а именно к контролю зубчатых пере дач.
Известно устройство для определения мертвого хода зубчатых механизмов, содержащее силовую, отсчетную цепь и стопорящий механизм. При определении мертвого хода к входному валу силовой цепи прикладывают крутящий момент в обоих направлениях при застопоренном выходном вале, измеряют угол поворота входного вала и по результатам его измерения судят о величине мертвого хода .
Недостатком устройства для определения мертвого хода является то, что условия работы зубчатого механизма полностью не воспроиз:водятся, а применение стопорного механизма обуславливает упругие деформации звеньев механизма, которые полностью входят в результат измерения. . Наиболее близким по технической сущности к предлагаемому изобретению является устройство для определения; мертвого хода кинематической передачи, содержащее два импульсных датчика оборотов, устанавливаемыена входном и выходном валах кинематической передачи, датчик скороети и счетчик импульсов, выходы импульсных датчиков соединены со счетчиком импульсов., выход счетчика импульсов соединен с входом блока сравне.ния, второй выход первого датчика импульсов подключен к датчику скорости, и блоки сравнения и памяти соединены между собой. Дат10чики импульсов выдают серии импульсов, которые запоминают/ сравнива- ют и по результатам сравнения -судят о величине углового перемещения входного вала 2 и выходного вала С2 .
15
Недостатком этого устройства является невысокая точность определения мертвого хода из-за неопределенности появления первого импульса
20 датчика входного вала относительно первого импульса датчика выходного вала. Поэтому углы . Ч и #2 будут определены с некоторой погрешностью, которая будет тем больше, чем меньше
25 будет выдано импульсов за один оборот датчика. .
Кроме того, данное устройство нельзя использовать с применением .импульсных датчиков, вьвдающих за
30 оборот менее десяти импульсов.
Цель изобретения - повышение точности контроля.
Поставленная цель достигается тем, что устройство, для определения мертвого хода кинематической переда чи, содержащее два импульсных датчика оборотов, устанавливаемые на входном и выходном валах кинематичекой передачи, датчик скорости и счечик импульсов, выходы- импульсных датчиков соединены со счетчиком импульсов , второй выход первого датчика импульсов подключен к датчику скорости, и блоки сравнения и памяти соединены между собой, снабжено блоком управления и сумматором, выходы счетчика импульсов и датчика скорости соединены с входами блока управления, два выхода блока управления соединены с входами блока сравнения, третий выход блока уп- равления соединен с третьим входом счетчика импульсов, а выход блока памяти - с входом сумматора.
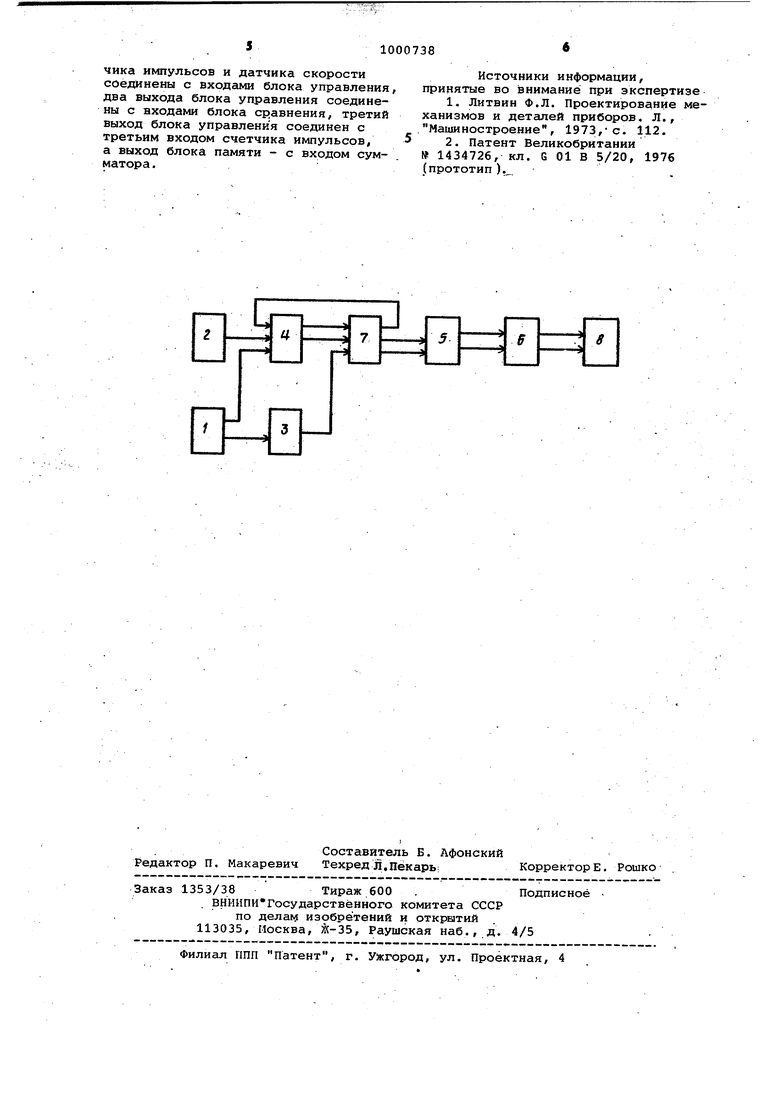
На чертеже изобр&жена структурна схема устройства.
Устройство для определения мертвого хода кинематической передачи содержит два импульсных датчика 1 и 2, установленных на входном и выходном валах кинематической передачи, датчик 3 скорости и счетчик 4 импульсов, выходы импульсных датчиков 1 и 2 соединены со счетчиком 4 импульсов, второй выход первого датн чина импульсов .подключен к датчику 3 скорости, блоки 5 и б сравнения и памяти, соединенные между собой, блок 7 управления и сумматор 8, выходы счетчика 4 импульсов и датчика 3 скорости соединены с входами блока 7 управления, два выхода блока 7 управления соединены с входами блока 5 сравнения, третий выход блока 7 управления соединен с третьим входом счетчика 4 импульсов, а . выход блока 6 памяти соединен с входом сумматора 8.
Устройство работает следующим образом.
Производят пуск и разгон оборудования . Перед остановкой включают предлагаемое устройство.,При этом датчики 1 и 2 импульсов выдают импульсы на каждый .оборот вала, например, один импульс на оборот. На блоке 5 сравнения по команде блока 7 управления происходит определение угла Vl, между первым импульсом, поступившим с датчика 1, и последующим и myльcoм, поступившим с датчика 2.
Угол /f запоминается блоком б памяти . Причем в блоке 5 сравнения снаЧсша определяется величина t - временной сдвиг между импульсами датчиков 1 и 2, а затем умножается коэффициент , пропорциональный величине скорости вращения w входного вала.
подаваемый на блок 5 сравнения с датчика 3 скорости через блок 7 управления, т.е.
.
Одновременно счетчик 4 импульсов начинает счет импульсов.
Производится останов оборудования.
0 Счетчик 4 импульсов продолжает считать импульсы, выдаваемые датчиками 1 и 2 импульсов до полной остановки оборудования. Производится реверсивн Лй пуск оборудования и раз5 гон до необходимой скорости. Одновременно блок 7 управления подает команду на счетчик 4 импульсов на реверс счета импульсов. При равенстве числа импульсов при прямом и
0 обратном направлениях блок 7 управления дает команду блоку 5 сравнения на определение угла между последним импульсом с датчика 1 и последним импульсом с датчика 2, т.е.
,
%
где t2 - соответствующий временной сдвиг между импульсами с датчиков 1 и 2;
,«. - скорость входного вала.
Величина угла определенная блоком 5 сравнения, запоминается блоком б памяти. Запомненные блоком памяти углы V и 2 подаются на
сумматор 8, который определяет величину Ч -1-42, которая соответствует величине угла мертвого хода для данного режима работы кинематической передачи.
Таким образом, предлагаемое устройство позволяет производить .измерение мертвого хода кинематической передачи в любых режимах работы и повысить точность измерений на 12%,
что способствует более точному определению динамических характеристик оборудования.
Формула изобретения
Устройство для определения мертвого хода кинематической передачи, содержащее два импульсных датчика оборотов, устанавливаемые на входном
и выходном валах кинематической передачи, датчик скорости и счетчик импульсов/ выходы импульсных датчиков соединены СО счетчиком импульсов, второй выход первого датчика импульсов подключен к датчику скорости, и блоки сравнения и памяти, соединенные между собой,отличающ е е с, я тем, что, с целью повышения точности, оно снабжено блоком
управления и сумматором, выходы счетчика импульсов и датчика скорости соединены с входами блока управления, два выхода блока управления соединены с входами блока сравнения, третий выход блока управления соединен с третьим входом счетчика импульсов, а выход блока памяти - с входом сум- . матора.
Источники информации, принятые во вниманиё при экспертизе
1.Литвин Ф.Л. Проектирование механизмов и деталей приборов. Л., Машиностроение, 1973,-с. 112,
2.Патент Великобритании
1434726, кл. G 01 В 5/20, 1976 (прототип ).„

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения мертвого хода зубчатых передач | 1987 |
|
SU1428910A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1237902A1 |
| Система регулирования подачи топлива транспортного дизеля | 1986 |
|
SU1348549A1 |
| Устройство для измерения мертвого хода отсчетных и зубчатых передач | 1985 |
|
SU1293479A1 |
| СИСТЕМА КОНТРОЛЯ РАБОТЫ РАСПРЕДЕЛИТЕЛЯ ШИХТЫ ДОМЕННОЙ ПЕЧИ | 1998 |
|
RU2126056C1 |
| Устройство для регистрации индикаторных диаграмм поршневых машин | 1988 |
|
SU1597634A1 |
| Устройство для оценки технического состояния механизма с зубчатыми колесами | 1990 |
|
SU1825967A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство для регулирования частоты вращения электропривода | 1989 |
|
SU1780081A1 |
| Способ автоматического регулирования рабочего процесса дизеля и устройство для его осуществления | 1984 |
|
SU1213232A1 |
