Изобретение относится к системам управления автоматизированным электроприводом и может быть использовано в устройствах с возможностью отключения динамической нагрузки, например, в печатающих устройствах ЭВМ.
Известно устройство для регулирования частоты вращения электропривода, содержащее блок регулирования, преобразователь частота-код, импульсный датчик частоты вращения и двигатель.
Известно также устройство для регулирования частоты вращения электропривода, содержащее дополнительно постоянное запоминающее устройство.
Наиболее близким к предлагаемому по технической сущности является устройство
для регулирования частоты вращения, содержащее блок регулирования, сумматор, коммутатор, блок памяти, блок управления режимами, блок контроля рассогласования частоты вращения, импульсный датчик частоты вращения и двигатель.
В этом устройстве сигнал рассогласования получают сравнением предварительно записанных параметров тахоимпульсов с параметрами соответствующих тахоимпульсов с датчика частоты вращения.
Недостатком этого технического решения для электроприводов с переменной динамической нагрузкой и неидеальной механической передачей является низкая динамическая точность из-за ухудшения точности записи в память фактических значеиий параметров тахоимпульсов при перепадах нагрузки и наличии упругих звеньев и люфтоа в механической передаче,
Целью изобретения являетсл повышение динамической точности за счет повышения точности записи фактических параметров тахоямпульсоа для электроприводов с переменной динамической нагрузкой и механической передачей, имеющей упругие звенья м люфты,N
Поставленная цель достигается том, что в устройстве для регулирования частоты пращемия электропривода, содержащем блок регулирования, информа1.1ионный вход которого подключен к выходу цифpOFioгo блока сравнения, вход сложения которого подключен к выходу коммутатора, первый информационный вход которого является задающим входом устройства, а второй информационный вход подключён к выходу блока памяти, управляющие входы коммутатора и блока памяти соединены с выходом блока переключения режима, информационный вход которого подключен через блок контроля рассогласования частоты вращения к выходу цифрового блока сравнения, а вход синхронизации - к выходу импульсного датчика частоты вращения, механически связанного с валом электропривода, подключенного к выходу блока регулирования, информационный вход блока памяти и вход вычитания цифрового блока сравнения подключены через преобразователь частотакод к выходу импульсного датчика частоты сращения, а блок регулирования имеет дополнительный.управляющий вход, подключенный к управляющему выходу блока переключения режима, причем вход включения и выход готовности блока переключения режима являются соответствую-щими входом и выходом устройства.
Поставленная цель достигается также и тем, что блок регулирования содержит переключатель коэффициента передачи, регулятор, фильтр, запоминающую ячейку, выходной коммутатор и усилитель мощности, причем информационный вход переключатепя коэффициента передачи является информационным входом блока регулирования, выход переключателя коэффициента передачи подключен к входу регулятора, выход которого подключен через фильтр к входу запоминающей ячейки, выход которой подключен к первому информационному входу выходного коммутатора, второй информационный вход которого соединен с выходом регулятора, а выход - с входом усилителя мощности, выход которого является выходом блока регулирования, управляюидий вход которого образуют управляющие входы запоминающей ячейки, выходного коммутатора и переключателя коэффициента передачи.
Кроме того, поставленная цель достигается тем, что блок переключения режима содержит счетчик, задатчик постоянного кода, компаратор и формирователь управляющих сигналов, причем вход сброса счетчика м первый вход формирователя управляю0 щях сигналов соединены с входом включения блока переключения режима, счетный вход счетчика и второй вход формирователя управляющих сигналов соединены с входом синхронизации блока переключения режима, первый вход разрешения счета счетчика м третий вход формирователя управляющих сигналов соединены о информа14ионным входом блока переключения режима, выход счетчика подключен к первому входу компаратора, к второму входу которого подключен выход задатчика постоянного кода, выход компаратора подключен к второму входу разрешения счета счетчика, четвертому входу формирователя управляющих сигналов и является выходом готовности блока переключения режима, управляющим выходом которого является выход формирователя управляющих сигналов.
Отличием заявляемого устройства от
0 прототипа является то, что блок регулирования имеет дополнительный управляющий вход, подключенный к управляющему выходу блока переключения режима, имеющего вход включения и выход готовности, что по5 зволяетотключать динамическую нагрузку и изменять передаточную характеристику блока регулирования на время записи параметров тахоимпульсов в память. Это дает возможность повысить точность записи параметров и соответственно точность регулирования электропривода.
Кроме того, заявляемое устройство отличается тем, что в блоке регулирования на усилитель мощности сигнал подается с коммутатора, что позволяет подключать к двигателю постоянный сигнал управления, получаемый усреднением с помощью фильтра и фиксируемый в запоминаюа1ей ячейке. Это дает возмох ность во время записи параметров отключить цепь обратной связи по скорости, что уменьшает влияние люфта на точность записи.
Заявляемое устройство отличается также и тем, что блок переключения режима
5 содержит счетчик, соединенный с компаратором, позволяющие задержать выдачу сиг-нала готовности после достижения номинальной скорости на время, необходимое для записи параметров определенного числа тахоимпульсов, при этом не двигатель
может подаваться, например, постоянный сигнал. Это дает возможность уменьшить влияние переходных процессов электропривода на точность записи.
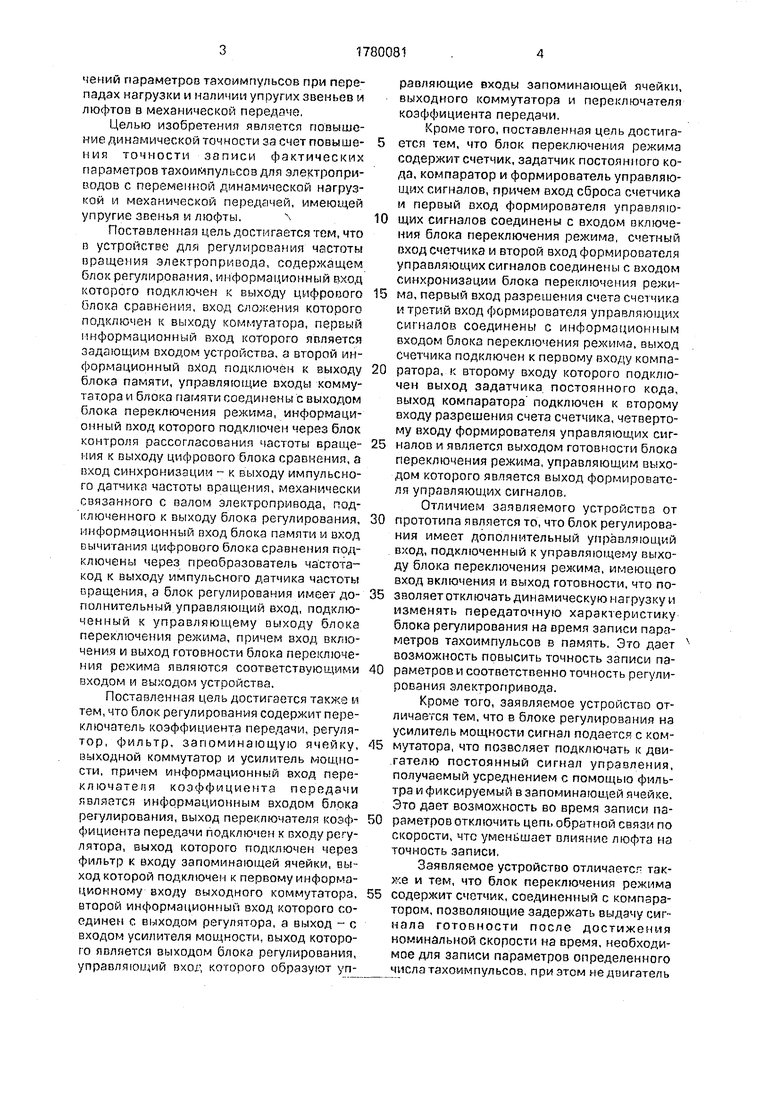
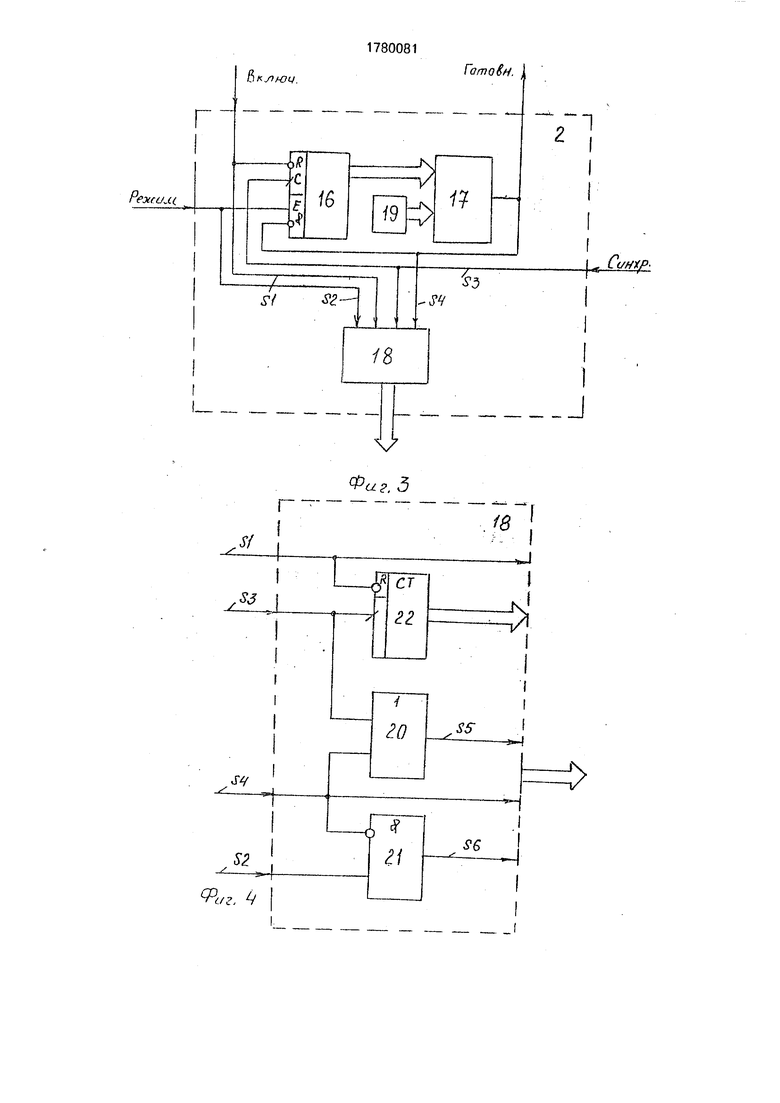
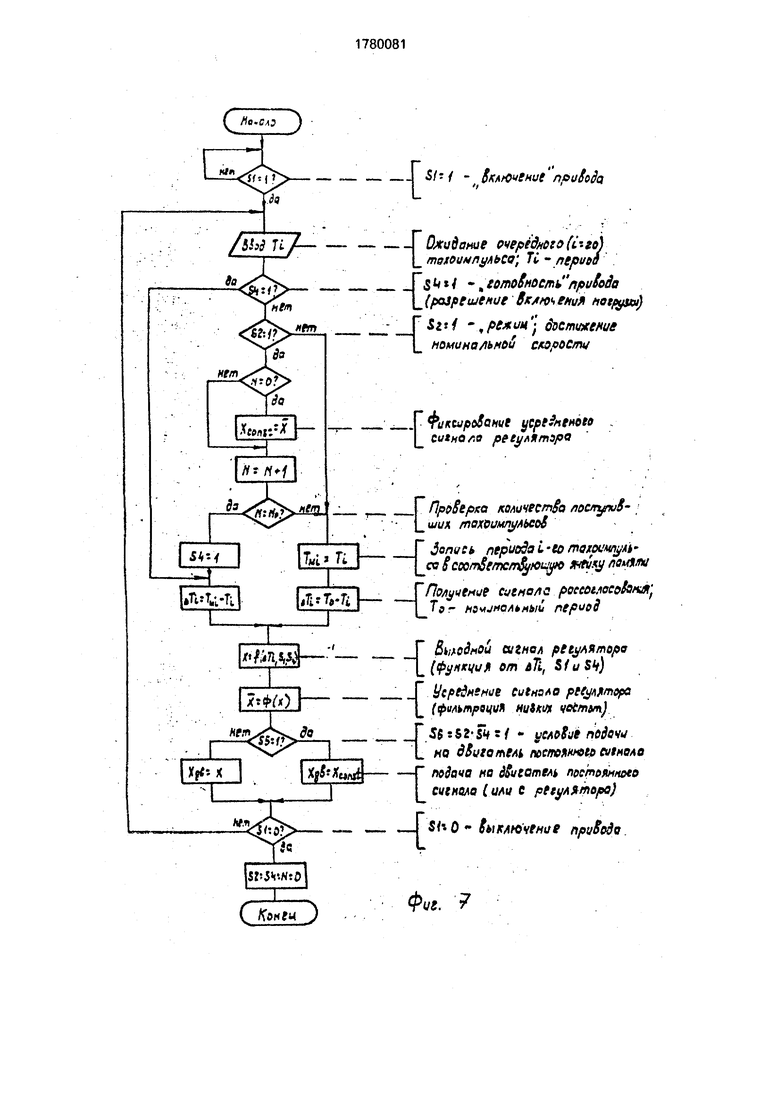
На фиг.1 приведена блок-схема устройства; на фиг.2 - структурная схема блока регулирования; на фиг.З - структурная схема блока переключения режима; на фиг.4 схема формирователя управляющих сигналов; на фиг.5 - временные диаграммы сигналов; на фиг.6 - алгоритм работы устройства; на фиг.7 - алгоритм работы устройства с отключением обратной связи на время записи; на фиг.8 - алгоритм работы блока контроля рассогласования частоты вращения.
Устройство содержит блок 1 регулирования, блок 2 переключения режима, сумматор 3, используемый в качестве цифрового блока сравнения, коммутатор 4, блок 5 памяти, блок 6 контроля рассогласования частоты вращения, импульсный датчик 7 частоты вращения, механически связанный с валом двигателя 8 и преобразователь 9 частота-код.
Блок 1 регулирования содержит табличное запоминающее устройство 10, выполняющее функцию изменения коэффициента передачи, цифровой регулятор 11, цифровой фильтр 12 низких частот, регистр 13, являющийся запоминающей ячейкой, выходной коммутатор 14 и усилитель 15 мощности с широтно-импульсной модуляцией выходного сигнала.
Блок 2 переключерия режима содержит счетчик. 16, компаратор 17, формирователь 18 управляющих сигналов и задатчик 19 постоянного кода. Формирователь 18 управляющих сигналов содержит схему ИЛИ 20, схему И 21 и адрсный счетчик 22.
Устройство работает следующим образом.
. При включении устройства на двигатель 8 начинает поступать с блока 1 регулирования сигнал управления, вырабатываемый из сигнала рассогласования, получаемого сравнением в сумматоре 3 кода, поступающего с коммутатора 4, с кодом фактической частоты вращения, поступающим через преобразователь 9 частота-код с импульсного датчика 7 частоты вращения, при этом на выход коммутатора 4 поступает заданный код частоты вращения, а фактической частоты вращения (периода следования тахоимпульсов)заносятся по каждому тахоимпульсу в соответствующие им ячейки блока 5 памяти (фиг,1).
Блоке контроля рассогласования частоты вращения служит для определения момента достижения номинальной частоты
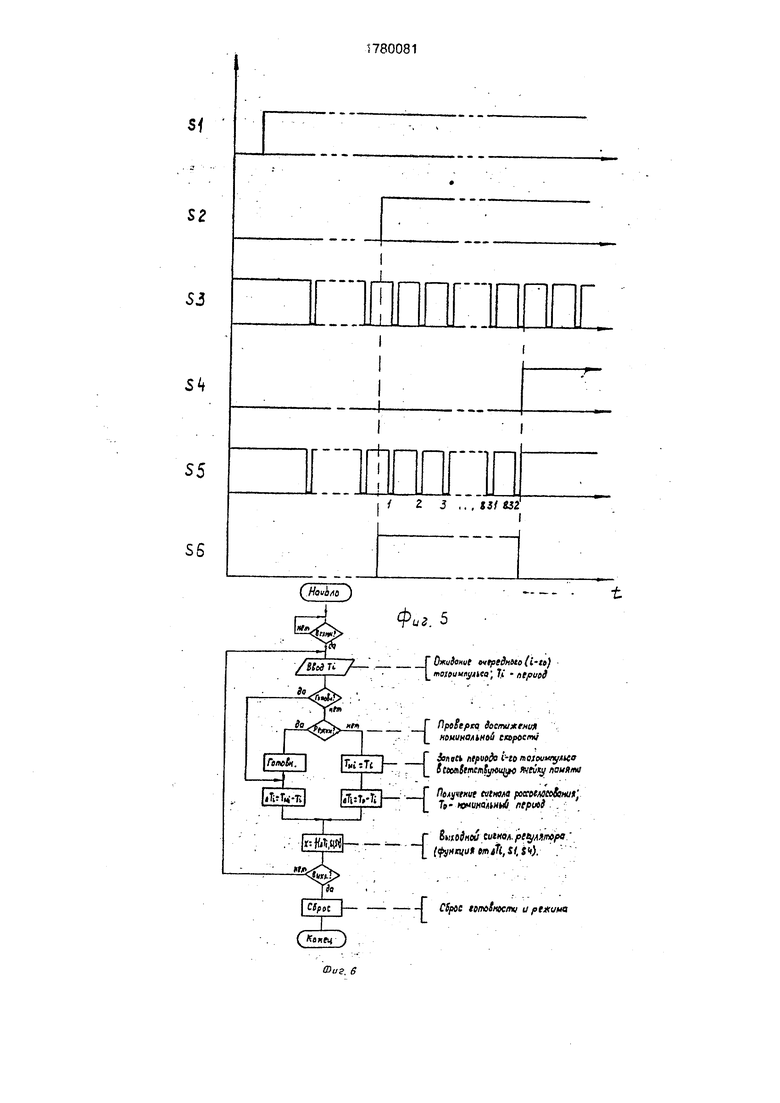
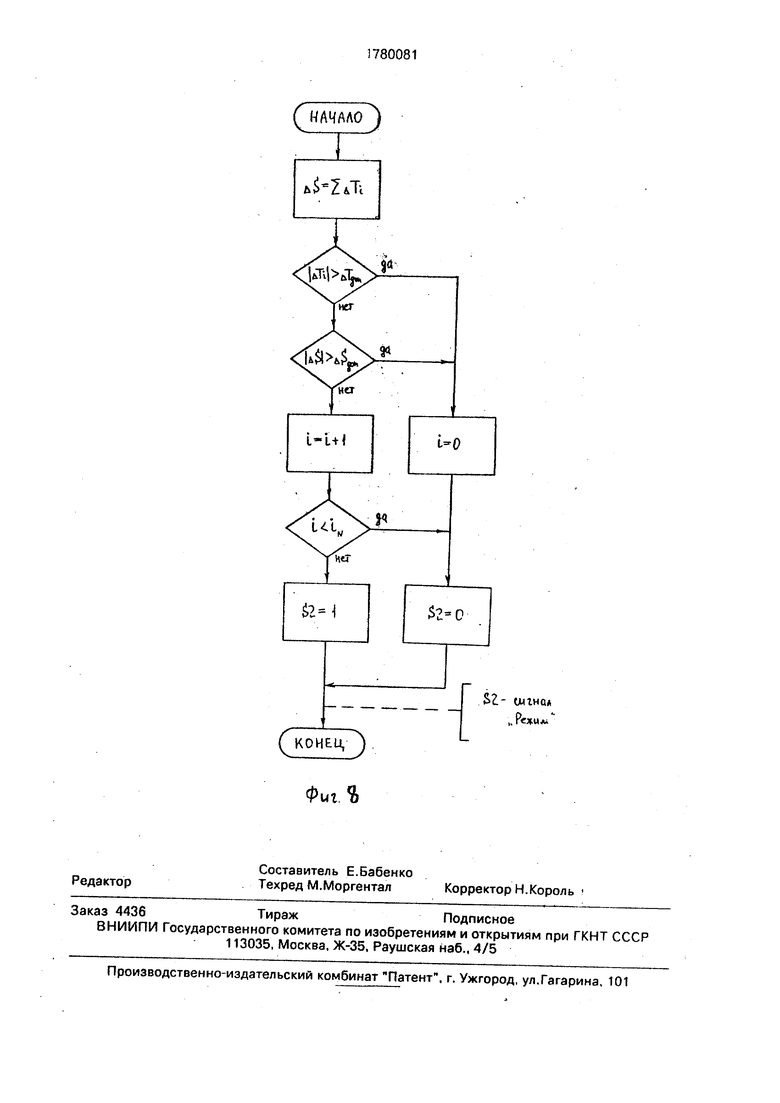
вращения, т.е. установившегося значения частоты вращения, равного заданному. На вход блока 6 с выхода сумматора 3 поступает кодовый сигнал рассогласования частоты 5 враа1ения, а с выхода блока б снимается сигнал Режим, поступающий на информационный вход блока 2 переключения режима и вырабатываемый при достижении номинальной частоты вращения. Определение момента достижения установившейся заданной частоты вращения иллюстрируется алгоритмом 6, приведенным на фиг.8. Поступающие на вход блока 6 разностные коды А TI суммируются (интегрируются),
5 после чего проверяется соответствие допускам как мгновенного значения Д Ti, так и накопленной ошибки А S. В случае нахождения А TI и As вне зоны допусков сигнал Режим не вырабатывается, в противном случае производится подсчет числа вхождений в допуск и при достижении заданного числа In (- числа тахоимпульсов на 2-3 оборота) вырабатывается сигнал Режим, свидетельствующий о достижении но5 минальной частоты вращения.
Блок 2 переключения режима определяет режимы работы блока 1 .регулирования, коммутатора 4 и блока 5 памяти. После окончания записи в блок 5 памяти, блок 2 переключения режима вырабатывает сигнал Готовность, поступающий на печатающее устройство и разрешающий печать, при этомна выход коммутатора 4 поступают записанные в блок 5 памяти коды частоты вра5 щения(периодаследования
тахоимпульсов), учитывающие технологический разброс изготовления синхрометок импульсного датчика 7 частоты вращения, с которыми и сравниваются в процессе дальQ нейшей работы соответствующие коды, поступающие на сумматор 3 через преобразователь 9 частота-код с импульсного датчика 7 частоты вращения.
Основой блока 1 оегулиоования является цифровой регулятор 11 (фиг.2). Алгоритмы регулирования закладываются в память цифрового регулятора 11 (например, микропроцессорного). Между входом цифрового регулятора 11 и входом блока 1 регулирования включено табличное запоминающее устройство 10, часть адресных входов которого подключена к входу управления блока 1 регулирования и используется для переключения таблиц перекодировки входного кода; т.е. для изменения передаточной характеристики блока 1 регулирования. На время записи кодов в блок 5 памяти коэффициент передачи табличного запоминающего устройства 10 уменьшается в несколько раЗ;
причем до достижения номинальной частоты вращения на усилитель 15 мощности подается через выходной коммутатор 14 сигнал с выхода цифрового регулятора 11, одновременно этот сигнал усредняется цифровым фильтром 12 низких частот. При достижении номинальной частоты вращения выходной сигнал цифрового фильтра 12 низких частот запоминается в регистре 13 и подается на усилитель 15 мощности через выходной коммутатор 14 вместо сигнала с регулятора 11 на протяжении двух оборотов шрифтоносителя, при этом запись кодов в блок 5 памяти продолжается. Занесение в регистр 13 и переключение выходного коммутатора 14 производится по сигналам, поступающим с блока 2 переключения режима.
Блок 2 переключения режима (фиг.З)определяет режимы работы коммутатора 4, блока 5 памяти и блока 1 регулирования. При поступлении сигнала включения Si (фиг.5) вход сброса счетчика 16 разблокируется, кроме того, сигнал Si поступает через формирователь 18 управляющих сигналов (фиг.4) на блок 1 регулирования, который приводит во вращение двигатель 8. На вход синхронизации начинают поступать тахоимпульсы Зз, которые подсчитываются адресным счетчиком 22, имеющим коэффициент пересчета, ранный количеству тахоимпульсов на оборот. Выход адресного счетчика 22 определяет ячейку блока 5 памяти, соответствующую пришедшему тахоимпульсу, а с выхода схемы ИЛИ 20 снимаются сигналы запись Ss в блок 5 памяти до прихода на вход схемы ИЛИ 20 сигнала готовности 34.
Сигнал готовности SA вырабатывается следующим образом.
При достижении номинальной частоты вращения иа информационный вход блока 2 переключения режима поступает сигнал 32. который разрешает работу счетчика 16. После подсчета счетчиком 16 числа тахоимпульсов за два оборота шрифтоносителя (число, определяемое кодом,подаваемым на второй вход компаратора 17 с задатчика 19 постоянного кода) компаратор 17 выдает сигнал готовности S/t, который блокирует работу счетчика 16 и поступает через формирователь 18 управляющих сигналов на переключение коммутатора 4 и табличного запоминающего устройства 10 блока 1 регулирования. Кроме того, сигнал готовности 34 поступает на выход устройства и разрешает печать.
От момента появления сигнала Sz (достижения номинальной частоты вращения) до момента выдачи сигнала готовности S4
схема И 21 вырабатывает сигнал Se, переключающий выходной коммутатор 14 блока 1 регулирования. При этом полржительным фронтом сигнала Зб в регистр 13 заносится усредненное значение выходного сигнала
цифрового регулятора 11, которое подается на усилитель 15 мощности на время действия сигнала Зб.
Таким образом изобретение повышает динамическую точность злектропривода по
0 сравнению с прототипом, так как позволяет производить более точную запись фактических параметров тахоимпульсов, соответствующих номинальной частоте вращения и используемых при регулировании.
5 Формула изобретения
1.Устройство для регулирования частоты вращения злектропривода, содержащее блокрегулирования, информационный пход которого подключен ic выходу цифрового
0 блока сравнения, вход сложения которого подключен к выходу коммутатора, первый информационный вход которого является задающим входом устройства, а второй информационный вход подключен к выходу
5 блока памяти, управляющие входы коммутатора и блока памяти соединены с выходом блока переключения режима, информационный вход которого подключен через блок контроля рассогласования частоты вращения к выходу цифрового блока сравнения, а вход синхронизации - к выходу импульсного датчика частоты вращения, механически связанного с валом электропривода, подключенного к выходу блока регулирования,
5 отличающееся тем, что, с целью повышения динамической точности, информационный вход блока памяти и вход вычитания цифрового блока сравнения подключены через преобразователь часто0 та-код к выходу импульсного датчика частоты вращения, а блок регулирования имеет дополнительный управляющий вход, подключенные к управляющему выходу блока переключения режима, причем вход включения и выход готовности блока переключения режима являются соответствующими входом и выходом устройства.
2.Устройство по п. 1, о т л и ч а ю щ е ес я тем, что блок регулирования содержит
0 переключатель коэффициента передачи, регулятор, фильтр, запоминающую ячейку, выходной коммутатор и усилитель мощности, причем информационный вход переключателя коэффициента передачи является ин5 формационнымвходомблока
регулирования, выход переключателя коэффициента передачи подключен к входу регулятора, выход которого подключен через фильтр ко входу запоминающей ячейки, выход которой подключен к первому информационному входу выходного коммутатора, второй информационный вход которого соединен с выходом регулятора, а выход - с входом усилителя мощности, выход которого является выходом блока регулирования, управляющий вход которого образуют управляющие входы запоминающей ячейки, выходного коммутатора и переключателя коэффициента передачи.
3. Устройство поп.1,отличающеес я тем, что блок переключения режима содержит счетчик, задатчик постоянного кода, компаратор и формирователь управляющих сигналов, причем вход сброса счетчика и первый вход формирователя управляющих сигналов соединены с входом включения блока переключения режима, счетный вход счетчика и второй вход формирователя управляющих сигналов соединены с входом синхронизации блока переключения режима, первый вход разрешения счета счетчика и третий вход формирователя управляющих сигналов соединены с информационным входом блока переключения режима, выход счетчика подключен к первому входу компаратора, к второму входу которого подключен выход задатчика постоянного кода, выход компаратора подключен к второму входу разрешения счета счетчика, четвертому входу формирователя управляющих сигналов и является выходом готовности блока переключения режима, управляющим выходом которого является выход формирователя управляющих сигналов.
фиг

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Устройство для испытания гибких кабельных изделий на многократные перемотки | 1990 |
|
SU1779949A1 |
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Устройство для автоматического регулирования температуры | 1988 |
|
SU1645945A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| ПРИЕМНОЕ УСТРОЙСТВО ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 1983 |
|
SU1840292A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Система регулирования турбины | 1985 |
|
SU1295012A1 |
| Многоканальное устройство для регистрации аналоговых и цифровых сигналов | 1988 |
|
SU1564649A1 |
Изобретение относится к автоматическому управлению и может быть использовано в системах стабилизации скорости электропривода алфавитно-цифровых печатающих устройств, в которых предусмотрена возможность отключения от привода динамической нагрузки. Цель изобретения - повышение динамической точности поддержания заданной частоты вращения электропривода. Указанная цепь достигается за счет введения перед рабочим режимом специального режима настройки, во время которого производится коррекция погрешностей дискретного датчика угловой скорости электропривода. Благоприятные условия для такой коррекции обеспечиваются отключением от привода переменной динамической нагрузки, уменьшением коэффициента усиления регулятора в режиме настройки и его полным отключением во время записи фактических параметров импульсов, поступающих с дискретного датчика угловой скорости электропривода. 8 ил.
IT
Г
N
)
Фиг. 2
Г
Фиг.д
iS
53
1 , ч Г ЗпчЛ nifwdo l-to
IHiiTt - -1 ScKaStmenSyt yo ячлиу почяяа
M}- -г p«;«« « «;
1
/ 2 3 .. . S3t f32
фиг. 5
г D Kuienat вчгреЗнма (i-ч)
moiiUMfyiua, li ntpued
4npoSt/ f9 ioemuineHuf
нйшчал нбй tnpocmi
7e-VKvm/HHud fitputi
Г ВчюЗнмеимвА. . l (((унхцииtmifi,). .-
C toniuimcmu и
-j Cl/Hi
Г fla.OAS J (Xfant;-X - irir Ху С /CoMgg 3 5/г / SKAfO SHUt npuSo Q Опадание очередною (i- го} твхоимпульсо, Н перабо готовность ni ufoSe (po3 fujeHue BKAfo ffiu ftot/ysta) Sf-f -,jPA«w ; docmififeMue HOMUHO/tbffOu ci pocmn Фчкыр оиие j/CffHfMfo CutHO/io pftijAHmspo Г HpoSepKO MA44fCfn§o ftocnyvB- I («уух /пах9имп1/А о$ donasb периода Ito n oxpuw Abctt S coofT emcfT&ficui sntu.vj лвдлл/ Получение catHOfla poeeotflKokuM Ту r Bkii oSfiOa euZHOA рееуляторв (cfitfHKifi/fi em лИ, SfuSh} cutHOAO pe /Ajtmope (t u kmpeifuX HutKtfx fet/nim) 55г525Цг/ yCA&SiJf HQ iS гomeAk r etrefiitt tn мнелв г на dSutotniA постоянного I cue нала (ила с pftyAf mopa) fмключfHitf npuSodo. уг. V
| Цифровая система регулирования частоты вращения двигателя постоянного тока | 1986 |
|
SU1386959A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
