t/i
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения мертвого хода зубчатых передач | 1987 |
|
SU1428910A1 |
| Устройство для измерения кинематической погрешности зубчатых передач | 1988 |
|
SU1585664A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1237902A1 |
| Микропроцессорное устройство для управления вентильным преобразователем | 1985 |
|
SU1356155A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Преобразователь постоянного напряжения в трехфазное с промежуточным звеном высокой частоты | 1978 |
|
SU785935A1 |
| Конвейерные весы | 2018 |
|
RU2733977C2 |
| Устройство для анализа кинематической погрешности зубчатых передач | 1984 |
|
SU1227945A1 |
| Устройство для управления гидравлическим ковочным прессом | 1977 |
|
SU749688A2 |
| ПОДСИСТЕМА ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ О ХАРАКТЕРИСТИКАХ РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ, ЗАВИСЯЩИХ ОТ СВОЙСТВ РЕЛЬЕФА МЕСТНОСТИ | 1994 |
|
RU2087001C1 |
Изобретение относится к машиностроению, а именно к средствам контроля механизмов с зубчатыми колесами. Изобретение позволяет определять относительное положение звеньев механизма, число циклов пересопряжения их зубьев в каждый момент времени работы, устанавливать связь фаз зацепления с соответствующими им участками кривых кинематической погрешности, сигналов вибраций и тен- зосигналов. Устройство содержит системы регулирования и управления режимами работы, системы измерения кинематической погрешности, вибраций и тензометрирования. Оно дополнительно снабжено блоком определения текущего относительного положения звеньев механизма. 2 ил.
Изобретение относится к машиностроению, а именно к средствам контроля механизмов с зубчатыми колесами.
Цель изобретения - расширение информативности устройства.
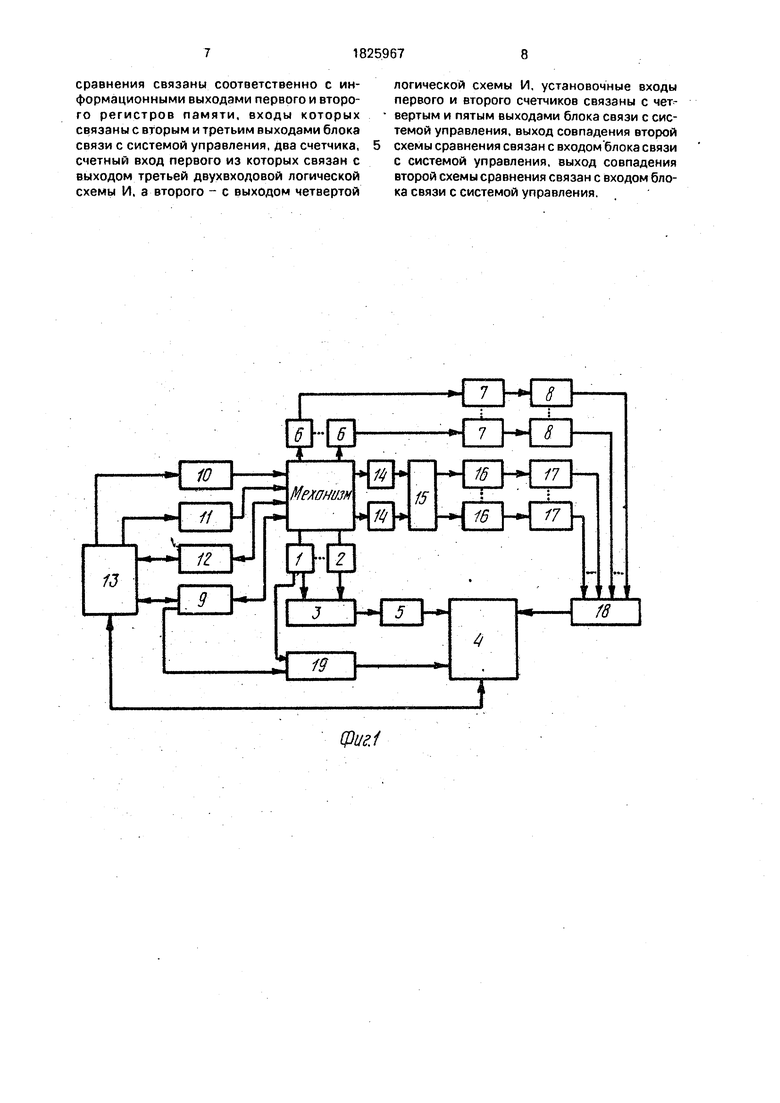
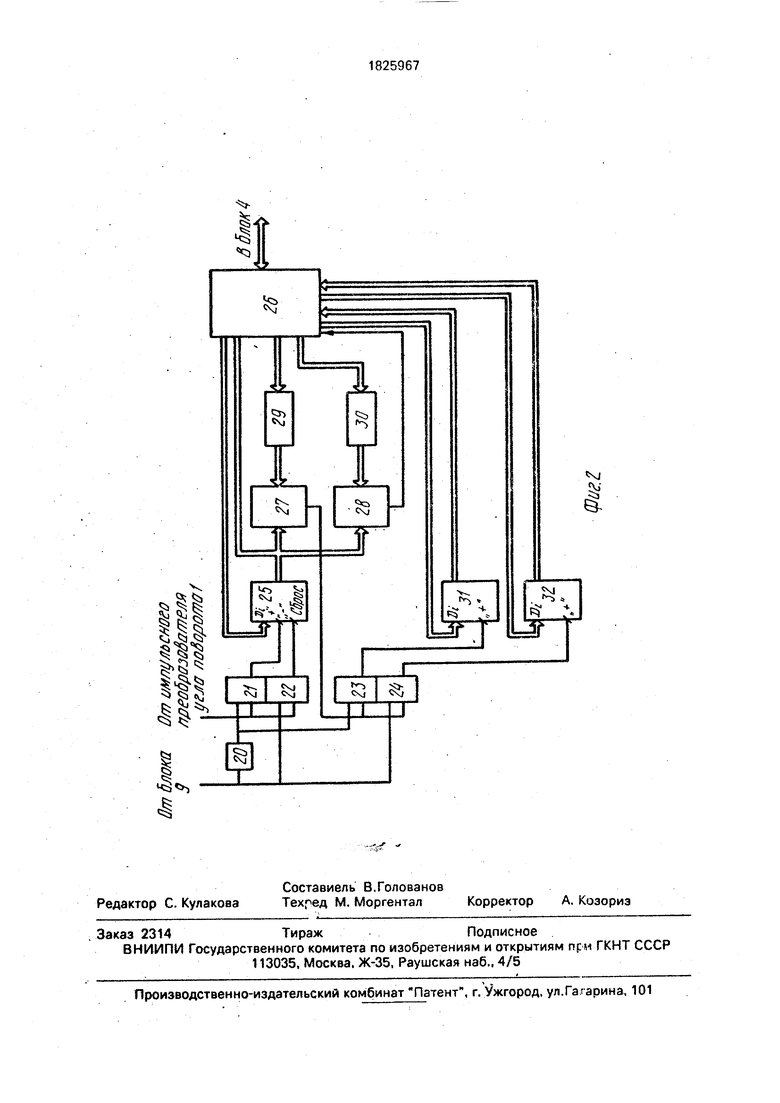
На фиг. 1 приведена структурная схема устройства оценки технического состояния механизма с зубчатыми колесами; на фиг. 2 - структурная схема блока определения текущего относительного положения звеньев механизма с зубчатыми колесами.
Устройство для оценки технического состояния механизма с зубчатыми колесами (фиг. 1) содержит импульсные преобразователи угла поворота 1 и 2, установленные соответственно 1 - на ведущем и 2 - на ведомом звеньях этого механизма и Снабженные выходами высокочастотных и одиночных импульсов на оборот, блок 3 получения сигналов кинематической погрешности отдельных участков кинематической цепи механизма, связанный с блоком 4 управления, обработки и отображения через блок 5 связи. Входы блока 3 соединены с выходами импульсных преобразователей 1 и 2. Устройство содержит вибропреобразователи 6, установленные на корпусе механизма, выходы которых через согласующие усилители 7 соединены с входами аналого-цифровых преобразователей 8, блок 9 регулирования частоты в направлении вращения механизма, блок 10 регулирования крутящего и тормозного моментов внешних валов механизма, переключатель 11 привод-на00
го ел ю о
грузка, блок 12 регулирования температуры масла, связанные с блоком 4 управления, обработки и отображения информации через устройство 13 связи. Устройство включает расположенные на звеньях механизма датчики 14 деформации, связанные через устройство 15 сьема информации, усилители 16, аналого-цифровые преобразователи 17 и блок 18 связи с блоком 4 управления, обработки и отображения информации, блок 19 определения текущего относительного положения звеньев механизма, связанный двухиаправленной шиной приема-передачи информации с блоком 4 управления, обработки и отображения, а его два входа связаны с выходом сигнала направления вращения привода блока 9 регулирования частоты вращения механизма и с выходом одиночного импульса импульсного преобразователя угла поворота ведущего звена 1.
Блок 19 определения текущего относительного положения звеньев механизма (фиг. 2) содержит инвертор 20, вход которого соединен с выходом сигнала направления вращения ведущего вала механизма блока регулирования частоты и направления вращения, четыре 21-24 двухвходовые логические схемы И, первые входы первой 21 и третьей 23 из них связаны с выходом инвертора 20Да первые входы второй 22 и четвертой 24 из них связаны с входом инвертора 20, вторые входы первой 22 и второй 23 связаны с выходом одиночного импульса на оборот импульсного преобразователя 1 угла поворота ведущего звена механизма/Блок 19 содержит также реверсивный счетчик 25, суммирующий и вычитающий входы которого связаны соответственно с выходами первой 21 и второй 22 двухвходовых логических схем И, а вход установки которого в исходное состояние связан с первым выходом схемы 26 связи с блоком 4 управления и схему 27 сравнения кодов, один из входов которой связан с выходом реверсивного 25 и с первым входом схемы 26 связи с блоком 4 управления и первым входом схемы 28 сравнения кодов, а выход совпадения которой связан со вторыми входами третьей и четвертой 24 двухвходовых логических схем И. Вторые входы схем сравнения 27 и 28 связаны, соответственно, с информационными выходами регистров памяти 29 и 30, входы которых связаны со вторым и третьим выходами схемы 26 связи с блоком 4 управления. Кроме того, блок 19 содержит два счетчика 31 и 32, счетный вход первого из которых 31 связан с выходом третьей 23 двухвходовой логической схемы И, а второго из них 32 связан с выходом четвертой 24 логической схемы И, установочные входы счетчиков 31 и 32 связаны соответственно с четвертым и пятым выходами схемы 26 связи с блоком 4 управления, обработки и отображения информации, а выход совпадения схемы 28 сравнения кодов связан с входом схемы 26 связи с блоком 24 управления, обработки и отображения информации.
Устройство работает следующим образом.
Блок 4 управления, обработки и отображения информации по заданной программе задает режим работы механизма,
5 установленного на стенде. Режим задается и контролируется с помощью блока 9 регулирования частоты и направления вращения и блока 10 регулирования крутящего и тормозного момента переключателем 11
0 привод-нагрузка блока 12 регулирования и поддержания температуры масла. Блок 4 управления, обработки и отображения информации устанавливает с помощью блока 19 определения текущего относительного по5 ложения звеньев механизма текущее относительное положение звеньев механизма,
С выходов преобразователей 1 и 2 угла поворота, установленных на механизме с зубчатыми колесами, используя блок 3
0 получения сигналов кинематической погрешности, получают сигналы кинематической погрешности отдельных участков кинематической цепи механизма. С помощью вибропреобразователей 6 получают
5 вибрационные сигналы, возбуждаемые зубчатыми колесами, усиливают их согласующими усилителями 7, преобразуют в цифровую форму с помощью аналого-цифровых преобразователей 8 и подают в блок
0 4 управления, обработки и отображения информации через блок 5 связи, с помощью устройства 15 сьема информации получают сигналы с датчиков деформации 14, установленных на механизме, усиливают их уси5 лителями 16, преобразуют в цифровую форму с помощью аналого-цифровых преобразователей и подают в блок 4 управления, обработки и отображения информации через блок 5 связи.
0 На вход блока 19 определения текущего относительного положения звеньев механизма поступает сигнал о направлении вращения с блока 9 регулирования частоты и направления вращения и одиночный им5 пульс на оборот с импульсного преобразователя 1 угла поворота ведущего звена механизма. Логическая схема, состоящая из инвертора и четырех логических элементов И, служит для получения необходимых импульсных последовательностей: одиночных
импульсов на оборот ведущего звена зубчатой передачи в прямом и обратном направлении и импульсов пересопряжения зубчатой передачи в прямом и обратном направлении реверсивный счетчик 25 и схема сравнения 27 образуют счетчик по модулю, на выходе которого вырабатывается сигнал пересопряжения зубчатой передачи, поступающий (в зависимости от направления вращения) на счетчик 31 циклов полного пересопряжения зубчатой передачи в прямом направлении, либо на счетчик 32 циклов полного пересопряжения зубчатой передачи в обратном направлении. Величина модуля определяется содержимым регистра памяти 29. Схема сравнения кодов 28 и регистр памяти 30 служат для выдачи сигнала разрешения взятия выборки, который поступает в схему 26 связи с блоком 4 управления, обработок и отображения информации. По окончании сеанса работы информация о текущем относительном положении звеньев зубчатой передачи и числе циклов полного пересопряжения в прямом и обратном направлениях заносится в блок 4 управления, обработки и отображения информации. Перед началом очередного сеанса работы в блоке 19 определения текущего относительного положения звеньев восстанавливается информация о текущем относительном положении звеньев механизма и числе циклов полного пересопряжения звеньев в прямом и обратном направлениях. Таким образом, данный блок позволяет проследить изменение технического состояния зубчатого механизма на всем жизненном цикле зубчатого механизма и привязать моменты возникновения дефектов к определенному моменту жизни зубчатого механизма.
В настоящее время опытный образец устройства находится в стадии изготовления.
Преимуществом предлагаемого устройства является возможность определения текущего относительного положения звеньев механизма в каждый момент времени его работы, и число циклов полноты их пересопряжения, и позволяет устанавливать связь фаз зацепления зубьев с соответствующими им участками кривых кинематической погрешность механизма, сигналов вибраций и тензосигналов.
Формула изобретения
вибропреобразователи, установленные на корпусе механизма, выходы которых через согласующие усилители соединены с входами аналого-цифровых преобразователей, блоки регулирования частоты и нэправле0 ния вращения механизма, крутяшего и тормозного моментов внешних валов механизма, блок регулирования температуры масла и блок связи с блоком управления, обработки и отображения, отличают, е5 вся тем, что, с целью расширения информативности оно снабжено дополнительным каналом измерений деформации, выполненным в виде блока определения текущего относительного положения звеньев меха0 ниэма, связанным двунаправленной шиной приема-передачи информации с блоком управления, обработки и отображения, а два его входа связаны с выходом направления вращения блока регулирования частоты и
5 направления вращения механизма и с выходом одиночного импульса преобразователя угла поворота ведущего звена.
0 относительного положения звеньев механизма содержит инвертор, вход которого соединен с выходом сигнала направления вращения ведущего звена механизма системы регулирования частоты и направления
5 бращения механизма, четыре двухвходовых логических схемы И, первые входы первой и третьей из них связаны с выходом инвертора, а первые входы второй и четвертой из них связаны с входом инвертора, вторые
0 входы первой и второй двухвходовых логических схем И связаны с выходом одиночного импульса на оборот преобразователя угла поворота ведущего звена механизма, реверсивный счетчик, суммирующий и вы5 читающий входы которого связаны соответственно с выходами первой и второй двухвходовых логических схем И, а вход установки которого в исходное состояние связан с первым выходом устройства связи с
0 системой управления и первой схемой сравнения кодов, один из входов которой связан с выходом реверсивного счетчика, с первым входом блока связи с системой срйинения кодов, один из входов которой связан с вы5 ходом реверсивного счетчика, с первым входом блока связи с системой управления и первым входом второго блока сравнения, а выход совпадения которого связан с вторыми входами третьей и четвертой доухвходо- еых логических схем И, вторые входы схем
сравнения связаны соответственно с информационными выходами первого и второго регистров памяти, входы которых связаны с вторым и третьим выходами блока связи с системой управления, два счетчика, счетный вход первого из которых связан с выходом третьей двухвходовой логической схемы И, а второго - с выходом четвертой
аз№/
логической схемы И, установочные входы первого и второго счетчиков связаны с четвертым и пятым выходами блока связи с системой управления, выход совпадения второй схемы сравнения связан с входом блока связи с системой управления, выход совпадения второй схемы сравнения связан с входом блока связи с системой управления.
т
| Способ анализа кинематической погрешности зубчатых передач | 1979 |
|
SU932215A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для оценки технического состояния механизма с зубчатыми колесами | 1982 |
|
SU1078241A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
